논문 2012-49-10-19
센서용 Incremental 델타-시그마 아날로그 디지털 변환기 설계
( Incremental Delta-Sigma Analog to Digital Converter for Sensor )
정 진 영*, 최 단 비*, 노 정 진***
( Jinyoung Jeong, Danbi Choi, and Jeongjin Roh )
요 약
본 논문에서는 센서용 incremental 델타-시그마 아날로그 디지털 변환기를 설계 하였다. 회로는 크게 pre-amplifier, S & H (sample and hold) 회로, MUX와 델타-시그마 모듈레이터, 그리고 데시메이션 필터로 구성 되어 있다. 델타-시그마 모듈레이 터는 3차 1-bit 구조이고 0.18 ㎛ CMOS 공정을 사용 하였다. 설계된 회로는 테스트 결과 5 ㎑ 신호 대역에서 signal-to-noise and distortion ratio (SNDR)는 87.8 ㏈ 의 성능을 가지고, differential nonlinearity (DNL)은 ± 0.25 LSB (16-bit 기준), integral nonlinearity (INL)은 ± 0.2 LSB 이다. 델타-시그마 모듈레이터 전체 소비 전력은 941.6 ㎼ 이다. 최종 16-bits 출력을 얻기 위 하여 리셋을 인가하는 N cycle을 200 으로 결정하였다.
Abstract
This paper presents the design of the incremental delta-sigma ADC. The proposed circuit consists of pre-amplifier, S &
H circuit, MUX, delta-sigma modulator, and decimation filter. Third-order discrete-time delta-sigma modulator with 1-bit quantization were fabricated by a 0.18 ㎛ CMOS technology. The designed circuit show that the modulator achieves 87.8
㏈ signal-to-noise and distortion ratio (SNDR) over a 5 ㎑ signal bandwidth and differential nonlinearity (DNL) of ± 0.25 LSB, integral nonlinearity (INL) of ± 0.2 LSB. Power consumption of delta-sigma modulator is 941.6 ㎼. It was decided that N cycles are 200 clock for 16-bits output.
Keywords : 데이터변환가, 델타-시그마, incremental ADC, 센서, 오버샘플링
Ⅰ. 서 론
현대과학이 나날이 발전하면서 동시에 미디어 산업 과 스마트폰 시장이 기하급수적으로 발전하고 있으며 유비쿼터스 기술이 우리 생활을 더욱 더 윤택하게 만들 고 있다. 이러한 흐름에 따라 오버샘플링 델타-시그마
* 학생회원, ** 정회원, 한양대학교 전자통신공학과 (Dep. of Electronics & Communication
Engineering, Hanyang Univ.)
※ 본 연구는 지식경제부 및 정보통신산업진흥원의 대 학 IT연구센터 지원사업의 연구결과와 (NIPA- 2012-H0301-12-1007), 지식경제부가 지원하는 산업 융합원천기술개발사업을 통해 개발된 결과임을 밝 힙니다. (10039145, 융복합 혁신 반도체 기술 개발) 접수일자:2012년3월15일, 수정완료일:2012년9월11일
ADC (analog-to-digital converter) 가 센서 응용 분야 에서 많은 관심을 받고 있다. 델타-시그마 방식의 ADC 의 경우 타 구조에 비해 저 주파수 대역에서 전력 소모 대비 높은 해상도를 얻을 수 있기 때문에 고해상도 설 계에 적합한 델타-시그마 모듈레이터의 장점들은 앞으 로 휴대용 전자제품을 포함해 광범위한 분야에 크게 요 구될 것으로 판단된다[2~5].
이전의 incremental ADC에 관한 연구는 단일채널의 DC 신호를 입력으로 받으며, 20-bits 이상의 해상도를 가지는 더욱 정확하고 정밀한 데이터 변환에 관한 연구 가 활발했었다[2]. 많은 논문에서는 1, 2차 구조를 가지 며, 단일채널의 입력을 변환하는 모듈레이터에 대해 소 개하고 있다[15~16]. 하지만 본 논문에서는 빠른 데이터 의 변환이 가능하도록 3차의 모듈레이터를 기반으로 하
고 입력 단에서 MUX를 이용하여 멀티채널의 입력을 처리할 수 있는 incremental 델타-시그마 ADC의 구성 을 소개한다. 또한 이산시간 델타-시그마 모듈레이터는 스위치드-커패시터 (switched-capacitor) 회로를 이용 하여 구현되므로 작은 슬루율을 보장하기 위해 적분기 단에 사용되는 증폭기의 단일 이득 주파수 (unity-gain frequency) 가 샘플링 주파수 (sampling frequency) 의 5 배 이상 커야 한다[1].
본 논문에서는 3차 1-bit 이산시간 incremental 델타 -시그마 ADC설계 방법과 더 좋은 성능을 얻기 위하여 사용된 회로 설계 기법에 대해 기술한다. 본 논문이 다 루고 있는 내용은 다음과 같다. Ⅱ 장에서 센서용 incremental 델타-시그마 ADC의 기본구조 및 특성에 대해 논하고, Ⅲ 장에서는 Ⅱ 장에서 논의된 모듈레이 터를 설계 및 구현하는 과정을 다루었다. Ⅳ 장에서는 설계한 모듈레이터의 시뮬레이션 결과와 측정 결과를 나타내었고, Ⅴ 장에서는 설계한 회로의 레이아웃을 나 타내었다. 마지막으로 Ⅵ 장에서는 시뮬레이션과 측정 결과를 바탕으로 제안한 설계의 우수성을 검증하였다.
Ⅱ. Incremental 델타-시그마 ADC 구조 및 특성
Incremental 델타-시그마 ADC는 전형적인 델타-시 그마 ADC의 구조를 그대로 가지고 있다. 그러나 incremental ADC는 전형적인 델타-시그마 ADC와 달 리 일정한 변환주기인 클럭의 갯수에 따라 모듈레이터 의 해상도를 조절할 수 있다는 차이점이 있다.
Incremental ADC는 저주파 신호를 입력으로 받아 높은 해상도를 가지고 변환하기에 적합한 특성을 가지 고 있기 때문에 초 정밀성과 저 전력이 중요시 되는 계 측 및 측정, 센서 분야에서 응용되고 있다. 또한 시간에 따라 지속적으로 동작이 이루어지는 일반적인 델타-시 그마 ADC와는 다르게 incremental ADC는 변환기 내 부에 있는 모든 저장 소자가 리셋 (Reset) 된 후, 각각 의 입력의 변환주기 동안 미리 결정된 클럭 주기 N cycle 동안만 동작하게 된다[2]. 따라서 단일 입력은 N 번의 클럭 주기 후에 출력 값을 가지게 된다. 결정된 N 번의 클럭 주기와 모듈레이터의 차수에 의해 모듈레이 터의 해상도가 결정된다.
또한 높은 해상도를 가지는 이러한 형태의 변환기는
선형성이 좋기 때문에 오프셋 조정 없이도 정확한 변환 을 할 수 있다. 결정된 각 cycle의 변환이 끝날 때 마다 출력 값을 계산하므로 time domain 해석이 가능하며, 모듈레이터의 성능을 검증할 때 출력FFT파형의 noise shaping 확인 뿐 아니라 INL error (integral non-linearity)과 DNL error (differential non-linearity) 를 확인하는 것이 중요하다[4].
그림 1(a)는 서로 직교하는 xyz좌표계에서 축의 움직 임을 측정할 수 있는 가속도 정보를 가진 입력 신호이 며, 그림 1(b)는 본 논문에서 제안하고 있는 자이로스코 프(gyroscope) 센서용 incremental 델타-시그마 ADC의 대략적인 블록도이다. 신호 ①의 7개의 입력 신호 중 Gx부터 Az까지는 그림 2(a)에서 나타낸 입력 신호이며 temp는 온도에 따라 달리 측정되는 가속도를 보정하기 위한 온도센서의 값이다. 입력 신호는 Pre-amplifier를 통해 증폭되어 신호 대비 잡음 성능이 좋아지고, 신호
②는 증폭된 입력 신호가 S & H회로를 지나 유지기에 있는 신호이다. 기존의 일반적인 델타-시그마 ADC와 다르게 MUX를 통해 멀티채널의 입력 신호의 변환이 가능한 incremental 델타-시그마 ADC 구조임을 알 수 있다.
x
z
y
(a)
(b) Pre-
amplifier
7:1 MUX
Incremental 델타-시그마
ADC S & H
S & H S & H S & H S & H S & H S & H
S&H_en GxH GyH GzH AxH AyH AzH TempH
① ②
Analog input Gx[v]
Gy[v]
Gz[v]
Ax[v]
Ay[v]
Az[v]
Temp[v]
그림 1. 본 논문에 제안된 센서용 incremental 델타-시그 마 ADC의 인터페이스 (a) 자이로스코프 센서의 동작 원리도 (b) incremental 델타-시그마 ADC Fig. 1. Interface of Incremental delta-sigma ADC for
sensors (a) Principles diagram of operation for gyroscope (b) incremental delta-sigma ADC.
Vin ∑ 1-z1-1
accumulator
Vref
Vcm V reset
Dout
V 0
clock s
10 20 30 40 50 60
di
di
clock s
10 20 30 40 50 60 70 80
70 80
(a)
(b)
(c)
Dout
clock s
10 20 30 40 50 60 70 80
(d)
그림 2. 1차 incremental ADC의 블록도와 동작 파형[3]
(a) 1차 incremental ADC의 블록도 (b) 적분기의 출력, V (c) 비교기의 출력, di (d) accumulator의 출력, Dout
Fig. 2. Block diagram and waveforms of first-order incremental ADC[3] (a) Block diagram of the first-order incremental ADC (b) output of the integrator, V (c) output of the integrator, di (d) output of the accumulator, Dout.
그림 2는 1차 incremental ADC의 기본 구조 블록도 와 DC 입력에 대한 동작파형을 나타낸 그림이다[3]. 그 림 2(a)는 1 bit 1차 incremental ADC의 블록도이며 비교기에서 ‘1’이 출력될 때마다 입력 쪽에 -VREF를 인 가하여 적분기의 초기 상태를 만들어 주도록 회로를 구 성하였다.
또한 본문에서 설계한 델타-시그마 모듈레이터는 높 은 해상도를 만족하기 위하여 3차 1-bit 모듈레이터로 설계하였다.
그림 2(b)는 어떠한 DC 입력 신호인 Vin를 인가하였 을 때, 클럭 주기에 따른 적분기의 출력 전압을 나타낸 것이다. -VREF 그림 2(c)에서는 그림 2(b)에서의 적분기 의 출력V가 비교기의 기준전압인 VCM보다 커질 때마다
계수 값 계수 값
a1 1.2 b1 0.33
a2 0.8 c1 0.33
a3 0.4 c2 0.6
b4 0.5 c3 0.33
표 1. 3차 이산시간 피드-포워드 델타-시그마 모듈레 이터의 계수 값
Table 1. Coefficient of third-order discrete time feed-forward delta-sigma modulator
X(n) − Y(n)
E(n) a1
a2 c2
b1
c1
c3 a3
1 1
1 −
−
−z z
1 1
1−
−
−z z
1 1
1 −
−
−z z b4
그림 3. 3차 이산시간 피드-포워드 델타-시그마 모듈레 이터의 MATLAB 모델링
Fig. 3. MATLAB modeling of third-order discrete time feed-forward delta-sigma modulator.
비교기의 출력 di가 ‘1’이 되는 것을 나타내고 있다. 그 림 2(d)에서는 그림 2(c)에서 적분기의 출력 V가 비교 기를 통해 ‘1’이 출력될 때마다 디지털 출력은 accumulator를 통해 1·VLSB씩 증가함을 알 수 있다.
Incremental ADC의 경우 간단히 accumulator로 디지털 데시메이션 필터를 구성할 수 있다. 따라서 그림2(d)의 accumulator는 디지털 데시메이션 필터를 의미한다. 즉, accumulator의 출력은 데시메이션 필터의 출력을 의미 한다. 모듈레이터의 해상도에 따라 리셋 신호를 인가하 는 클럭 주기가 먼저 결정되고 그에 따라 accumulator 의 출력 bit수도 결정된다. 그림2에서는 84번의 클럭 주 기를 세고 있으며, accumulator는 최소 7bit의 출력 값 을 갖게 된다.
Ⅲ. 3차 이산시간 델타-시그마 모듈레이터의 구조 및 회로 구현
1. 3차 1-bit 이산시간 델타-시그마 모듈레이터의 behavioral simulation
Incremental 데이터 변환기는 델타-시그마 모듈레이 터 구조를 기반으로 하기 때문에 conventional 델타-시 그마 모듈레이터의 설계가 선행되어야 한다. 델타-시그 마 모듈레이터 설계는 목표에 따라 양자화기(quantizer)
의 bit수, 모듈레이터의 구조, 루프 필터의 차수 등과 같 은 다양한 설계 요소를 고려해야 한다. 고 해상도의 Incremental 델타-시그마 ADC를 구현하기 위해 본 논 위해 incremental ADC의 변환주기를 200 클럭으로 결 정하였으며, 샘플링 주파수를 2 ㎒로 결정하였다. 또한 모듈레이터의 높은 성능과 함께 안정성을 고려하여 3차 의 피드-포워드 구조를 선택하였으며 Lee's rule[5]에 따 라
의 최대 크기를 1.5이하로 설계하였다. 이 와 같은 고려사항만으로는 모듈레이터의 안정성과 원하 는 성능을 얻기가 힘들기 때문에 MATLAB을 이용한 behavioral 시뮬레이션을 통하여 최적화된 계수 값을 얻었다. 모듈레이터에 사용된 최적화된 계수 값은 표 1 에 정리하였다.그림 3은 MATLAB으로 구현한 3차 1-bit 델타-시그 마 모듈레이터의 구조를 나타낸 그림이다. 모듈레이터 의 X, Y, 그리고 E는 각각 입력과 양자화기의 출력, 그 리고 양자화 잡음를 뜻한다. 첫 번째와 두 번째 적분기 의 출력은 각각 a1과 a2를 통하여 양자화기의 입력으로 들어가는 피드-포워드 패스를 형성하며, c1을 통하여 양자화기의 출력을 첫 번째 적분기의 입력으로 피드-백 하는 패스를 형성하고 있다. 이를 통해 모듈레이터 내 부에서 생기는 잡음이 수정된다.
뿐만 아니라 피드-백 된 신호에 의해 루프 필터 내의 입력이 입력 신호를 포함하지 않고, 그에 대한 루프 필
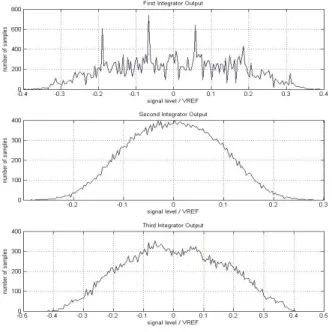
그림 4. 적분기 출력 분포도 Fig. 4. Integrator output range.
그림 5. 모듈레이터의 PSD (power spectrum density) 시 뮬레이션 결과
Fig. 5. PSD simulation result of modulator.
터에서의 출력이 양자화 잡음의 시간 지연 항으로 나타 나는 피드-포워드 구조를 선택함으로써 적분기의 비 선 형성에 대한 입력 전압의 민감도가 작아지고, 적분기가 저 전압 스윙을 한다는 장점이 있다[3].
그림 4는 MATLAB으로 구현한 3개 적분기의 출력 스윙 범위를 나타낸 그림이다. 출력 스윙 범위가 작을 수록 다음 적분기에서 증폭기의 입력 범위가 줄어들어 트랜지스터의 동작이 보다 수월할 수 있다는 장점이 있 지만 노이즈에 대한 민감도가 커지게 된다는 문제점이 있다. 따라서 증폭기의 입력 범위를 고려하여 각 적분 기의 출력 스윙 범위를 그림 4와 같이 결정하였다.
MATLAB으로 얻은 이상적인 3차 1-bit 델타-시그 마 모듈레이터의 시뮬레이션 결과는 그림 5와 같다.
Incremental ADC는 저주파 대역의 입력 전압을 가지므 로 1㎑의 입력 전압을 인가하였다. 이는 5㎑의 대역 내 에서 약 119 dB의 SNDR을 가진다.
2. 이산시간 피드-포워드 델타-시그마 모듈레이터의 회로 구현
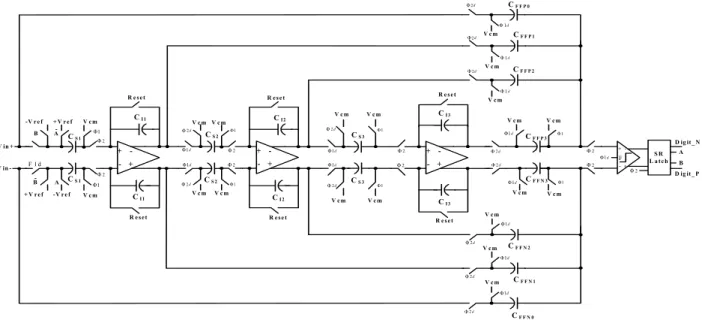
본 논문에서 구현한 이산시간 델타-시그마 모듈레이 터는 differential mode 타입의 스위치드-커패시터 방식 을 사용하여 구현하였다. 센서에서 전달되는 신호 처리 를 위해 그림 6의 델타-시그마 모듈레이터는 크게 4가 지의 클럭에 의해 동작하게 된다. Φ1과 Φ1d가 1인 경 우에 샘플링 동작이 이루어지며 Φ2와 Φ2d가 1인 구간 에 적분 동작이 이루어지게 된다. Φ1, Φ1d, Φ2, 그리고
CS 1 CS 1
- - + + B
A V in + V in -
CI 1
CI 1 + V r e f
-V r e f + V r e f
-V r e f V c m
V c m
CS 2
CS 2
CI2
CI 2 V c m
V c m V c m
V c m -
- + +
CS 3
CI3
V c m V c m
- - + + CS 3
CI 3
V c m V c m
V c m V c m
V c m
CF F N 3
CF F P 3
V c m V c m V c m
D ig it_ N
D ig it_ P +
+ -
- S R
L a tc h A-
B-
B A
F 1 d F 1
V c m V c m
V c m CF F P 0
CF F P 1
CF F P 2
CF F N 2
CF F N 1
CF F N 0 Φ2d
Φ1d Φ1
Φ1 Φ2
Φ2
Φ2 Φ2 Φ1 Φ1
Φ2d Φ2d
Φ1d
Φ1d Φ1d
Φ1d
Φ2 Φ2 Φ2d
Φ2d Φ1
Φ1
Φ2d Φ2d Φ1d
Φ1d
Φ2 Φ2 Φ1
Φ1 Φ1d
Φ2 Φd
Φ 2
d V c m
R e s e t
R e s e t
R e s e t
R e s e t
R e s e t
R e s e t
1 Φd
Φ 2
1d Φd
Φ 2
1d
Φ2d Φ1d
Φ2d Φ1d
그림 6. 3차 이산시간 피드-포워드 델타 시그마 모듈레이터 Fig. 6. 3rd order discrete time feed-forward delta-sigma modulator.
Φ2d는 모두 2 ㎒의 동작속도를 가지며 Φ1과 Φ2는 비 중복(non-overlapping) 클럭이다. 클럭 명칭 끝에 붙는
‘d'는 지연된 클럭을 의미하며, 이 클럭은 스위치로 인 해 발생되는 전하 주입현상을 최소화하기 위하여 사용 한다. 그리고 결정된 200의 N cycle이 지난 후, 리셋 신 호 인가 시 적분기의 커패시터들은 전하를 완전히 없애 게 된다[7~8].
3. 리셋 제어 블록과 3차 디지털 데시메이션 필터 설계한 incremental 델타-시그마 모듈레이터는 200의 클럭 주기 후에 리셋 신호가 활성화되어야 한다. 변환 주기가 끝나며 발생한 리셋 신호를 모듈레이터와 디지 털 필터에 인가한다. 원하는 클럭 주기 이후에 리셋 신 호를 활성화하기 위해 플립플롭으로 구성된 카운터를 사용하였다. 본 논문에서 설계한 리셋 제어 블록을 그 림 7에 나타내었다.
200개의 클럭 주기를 카운터의 입력으로 인가하였을 때, 마지막 클럭이 인가 된 후 카운터의 출력으로 리셋 신호가 출력되도록 설계하였다. 출력된 리셋 신호는 모 듈레이터와 필터의 리셋 신호로 사용될 뿐 아니라, 리 셋 제어 카운터의 리셋 신호로 피드-백 한다. 리셋 된 카운터는 다시 200의 클럭 주기동안 클럭 신호를 받아 다음 변환의 리셋 신호를 출력하도록 설계하였다.
3차 델타-시그마 모듈레이터를 사용하였기 때문에
counter
clock reset
(a)
(b) clock
reset
200 clock
그림 7. 본 논문의 리셋 제어 회로의 블록도와 출력 파 형 (a) 블록도 (b) 출력 파형
Fig. 7. Block diagram and output waveform of reset control circuit (a) Block diagram (b) output waveform
데시메이션 필터는 3차 이상으로 설계하여야 한다. 설 계한 데시메이션 필터의 블록도는 그림 8과 같다. 앞서 그림 2에서 1차 incremental ADC 의 디지털 데시메이 션 필터는 1차의 accumulator로 간단히 구현할 수 있 음을 나타내었다. 본 논문에서는 3차의 디지털 데시메 이션 필터를 구현하기 위해 accumulator를 3차로 구현 하였다.
Δ∑
modulator
1 1-Z-1
1 1-Z-1
1
1-Z-1 Dout
reset clock
그림 8. 3차 디지털 데시메이션 필터의 블록도 Fig. 8. Block diagram of digital decimation filter.
그림 8과 같이 델타-시그마 모듈레이터의 출력은 디 지털 필터의 입력으로 들어오게 된다. 주어진 200 클럭 의 변환주기 동안 필터가 동작하고 모듈레이터와 동시 에 리셋 신호가 인가되어 다음 변환을 시작하게 된다.
4. 전류 복사 방식의 증폭기 (Current mirror amplififer)
본 논문에서 사용된 2.8V 전원 공급은 비교적 낮은 전압은 아니지만, 높은 문턱 전압으로 인한 OTA (operational transconductance amplifier) 입력 스윙 범 위가 제한되고 많은 파워소모의 문제점이 예상되어 동 일한 파워소모 대비 높은 DC gain을 갖고 입력 스윙 범위의 제한이 상대적으로 여유로운 OTA의 구조를 선 택해야 한다. 즉, OTA의 높은 DC gain과 더불어 저 전 압의 OTA 설계 시 출력의 스윙 크기를 크게 유지 하 는 것이 주 고려사항이다. 이를 위해 DC gain과 출력 임피던스가 높지만 전압 headroom이 상대적으로 큰 folded-cascode 구조의 OTA를 사용하는 것은 적절하지 않다. 따라서 single stage인 OTA 구조를 많이 사용하 고 있다.
이에 적합한 기본적인 OTA 구조는 그림 9에 나타낸
M3 M1
OUTP OUTN
INP INN
M2
2Io
Io Io
VDD
그림 9. Current mirror OTA 회로[9]
Fig. 9. Current mirror OTA circuit[9].
그림 10. 본 연구에 사용된 OTA 설계 회로
Fig. 10. Modified Current mirror OTA circuit in the paper current mirror amplifier이다. M2 와 M3의 전류비가 1 : B 일 때 current mirror OTA의 DC gain은 수식 1과 같다.
(1)
보통 이 구조의 OTA는 DC gain이 30 dB 근처여서 DC gain 특성이 여전히 매우 낮다. 그림 10의 OTA 구 조는 보통 비교기에 많이 쓰이는 구조 중에 하나로 positive 피드-백을 이용하여 DC gain을 높이는 구조이 다[9]. 위 구조의 positive 피드-백 gain stage에서 gain 은 수식 2와 같이 나타낼 수 있다.
∙ ∙
(2)
값을 너무 크게 결정한 경우에 트랜지스터의 비 매 칭 (mismatch) 현상으로 인해 값이 1 에 가까워 질 수 있다. OTA DC gain은 매우 커지며 비교기 회로와 같은 동작을 하게 되어 원하는 주파수 특성을 얻을 수 가 없다. 본 연구에서는 안정된 phase margin 값을 얻 기 위해서 값을 너무 크지 않은 0.43 으로 정하고 설 계를 하였다.
DC gain의 gain과 더불어 단일 이득 주파수 (unity-gain frequency) 의 값을 얻을 수 있다. 단일 이 득 주파수는 수식 3과 같이 표현 될 수 있다.
Parameter 시뮬레이션 값 unit
공급 전압 2.8 V
전류 소모 173.4 ㎂
DC gain 54.3 ㏈
위상 여유 52.35 °
단일 이득 주파수 72.8 ㎒
유효 로드 커패시터 2 ㎊
표 2. OTA 시뮬레이션 결과 요약 Table 2. Summary of OTA simulation result.
(3)
일반적으로 이득이 증가하여도 단일 이득 주파수는 일정한 상수 값을 가지게 된다. 본 연구에서 사용한 OTA는 Positive 피드-백의 영향으로 단일 이득 주파수 가 이득의 증가분인 1/(1-) 배 만큼 커지게 된다.
고려할 또 다른 사항은 설계한 OTA의 위상 여유이 다. 본 논문에서 설계한 모듈레이터의 OTA는 약 52.3°
의 위상 여유를 가진다. 설계한 회로의 샘플링 주파수 가 2MHz로 상대적으로 느리기 문에 다소 낮은 위상 여유로 인한 오실레이션 현상이 있더라도 충분한 정확 성을 가지고 회로가 안정화 된다. 샘플링 주파수에 비 해 단일 이득 주파수가 매우 높은 경우에는 다소 낮은 위상 여유를 갖는 OTA가 설계되는 경우도 있다[14]. 본 논문에 제안된 델타-시그마 모듈레이터의 적분기에 설 계된 OTA의 사양을 표 2에 나타내었다.
5. 부트스트랩 스위치 (Bootstrapped switch) 설계한 3차 1-bit 델타-시그마 모듈레이터는 NMOS 스위치를 사용하여 스위치드-커패시터 (switched- capacitor) 회로로 구성하였다. 그림 11은 스위치드-커 패시터 회로에서 쓰이는 일반적인 NMOS 스위치이며,
V
INVDD
Vthn
V
OUT그림 11. 일반 NMOS 스위치 Fig. 11. Normal NMOS switch.
VSS VDD
vs s
S3 S4
S1 S2
S5
SW Vgs
Cboot
A B
IN OUT
Φ2 Φ2
Φ1 Φ1
Φ2 Vc
그림 12. 부트스트랩 스위치 회로[6]
Fig. 12. Bootstrapped switch circuit[6]
공통 모드 전압 ()을 갖는 일정한 정현파가 NMOS 의 소스단자를 통하여 인가된 형태를 나타내었다.
2.8V의 전원 공급이 가해지고, 소스 단자에 인가된 입력 전압 범위에 맞춰 사용된 공정의 (threshold voltage of NMOS) 가 트랜지스터의 slow코너에서 800
㎷∼920 ㎷ 까지 변하기 때문에, 소스 단자에 큰 입력 이 인가되었을 때에는 스위치가 완벽하게 턴-온 되지 않는 문제가 생긴다.
이러한 문제점을 해결하기 위해 첫 번째 적분기 내부 로 입력 신호가 직접 전달되는 스위치를 로컬 부트스트 랩 스위치를 이용하여 구성하였다.
기본적인 transistor-level의 부트스트랩 스위치 회로 를 설계하는 방법을 그림 12에 나타내었다. 주 스위치 (SW), 5개의 추가 스위치와 부트스트랩 커패시터로 구 성된다.
이 회로는 두 개의 비 중복(non-overlapping) 클럭 신호에 의해서 동작된다. 먼저 off-phase (
) 일 때, Cboot는 S3과 S4에 의해서 charge되고, S5에 의해 주 스 위치는 열려있게 된다.on-phase (
) 일 때, S1과 S2가 커패시터를 주 스위치의 게이트와 소스에 연결하면,는 에 입력 전압까지 더해진 값이 된다. 따라 서 NMOS의 가 증가하였으므로 스위칭 동작을 더 잘하게 된다[6].
Ⅳ. 시뮬레이션 결과 및 측정결과
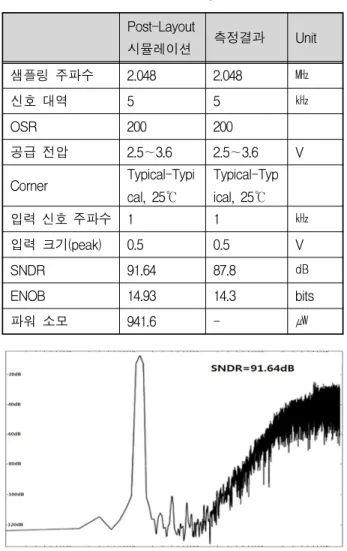
설계된 모듈레이터의 LPE (layout parastic extraction) 시뮬레이션 결과와 측정 결과를 표 3에서 요약하였다. 입력 신호의 주파수는 1 ㎑이고 -4 ㏈FS의 입력을 설정하고, HSPICE를 통해 시뮬레이션 한 16,384개의 샘플 개수를 hanning window를 통해 FFT 한 결과 파형은 그림 13에 나타내었다. 10 ㎑ 이전과 이 후에 각각 신호 대비 잡음이 감소한 모습과 잡음성분들 이 신호대역 바깥으로 밀려나는 noise shaping이 잘 이 루어지는 것을 볼 수 있다.
표 4의 시뮬레이션 결과는 제안된 3차 1-bit 피드-포
Post-Layout
시뮬레이션 측정결과 Unit
샘플링 주파수 2.048 2.048 ㎒
신호 대역 5 5 ㎑
OSR 200 200
공급 전압 2.5∼3.6 2.5∼3.6 V
Corner Typical-Typi cal, 25℃
Typical-Typ ical, 25℃
입력 신호 주파수 1 1 ㎑
입력 크기(peak) 0.5 0.5 V
SNDR 91.64 87.8 ㏈
ENOB 14.93 14.3 bits
파워 소모 941.6 - ㎼
표 3. Post-layout 시뮬레이션 결과 및 측정 결과 (16,384개의 샘플 / Hanning window) Table 3. Post-layout simulation result and test result.
(16,384 samples / Hanning window)
그림 13. 모듈레이터 출력의 LPE 시뮬레이션 결과 Fig. 13. LPE simulation result of modulator output.
워드 델타-시그마 ADC를 schematic HSPICE 시뮬레이 션과 LPE HSPICE시뮬레이션을 각 코너별로 비교하여 정리한 것이다. 일반적으로 이상적인 회로를 시뮬레이 션 했을 때와 비교해보면, LPE를 통하여 기생 저항, 커 패시터 성분이 추가되면서 SNDR, ENOB의 결과가 변 하지만, LPE HSPICE 시뮬레이션 결과도 목표하였던 ENOB 14-bits에 만족하는 것을 볼 수 있다.
그림 14는 칩 성능 측정을 위해 만든 테스트 보드 사 진을 보여주고 있다. 전원은 테스트 보드 상에서 아날 로그 전원과 디지털 전원을 분리하여 칩 전원을 공급 하였고, 입력 신호는 입력 정현파 신호 발생기능과 신 호 대 잡음비 및 전고조파 측정기능을 동시에 갖춘 오 디오 분석기 (audio precision AUX-0025)를 통해서 넣 어 주고 있다. 칩은 패턴발생기 (E81130A)로 부터 발생 된 2㎒의 클럭 주파수에 의해서 동작되며, 그림 14의 clock 단자를 통해 샘플링 클럭을 넣어 주고 있다.
그림 15는 실체 칩에 1 Vpp 정현파를 인가하여 델타
VDD &Corner 온도
VDD=2.5V, Slow-Slow, -40℃
VDD=2.8V, Typical-Typical, 25℃
VDD=3.6V, Fast-Fast, 85℃
schematic 102.6 dB (ENOB=16.75 bits)
104.7 dB (ENOB=17.1 bits)
104 dB (ENOB=17 bits)
LPE 90.47 dB (ENOB=14.73 bits)
91.64 dB (ENOB=14.93 bits)
96.24 dB (ENOB=15.69
bits) 표 4. 코너별 schematic과 LPE HSPICE시뮬레이션 비
교
Table 4. Comparison schematic simulation with LPE simulation in each corner.
clock
DSM input analog power
digital power Designed chip
그림 14. 테스트 보드 사진 Fig. 14. Test board photograph.
그림 15. 칩 측정 결과 모듈레이터 출력의 FFT 파형 Fig. 15. Test result of modulator output.
목표(target) 11,534,336 샘플 DNL (TYP) ± 0.5
(MAX) ± 1 ± 0.25 LSB INL (TYP) ± 1
(MAX) ± 4 ± 0.2 LSB 표 5. DNL / INL 측정 결과
Table 5. DNL / INL test result
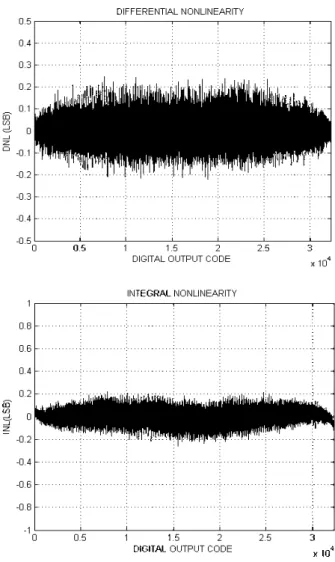
-시그마 모듈레이터의 출력을 측정하여 FFT한 파형이 다. 그림과 같이 87.8 dB의 SNDR, 14.3-bits의 SNDR 을 갖는다. 이는 14-bits ENOB 목표치에 만족하는 것 을 확인하였다. 또한 ADC의 DNL과 INL은 이상적인 출력 값과 실제 측정 값 간의 편차를 설명해주는 정적 변수로서 incremental ADC의 성능을 측정하는 기준이 된다. DNL은 이상적인 출력 값에 비교해 측정되는 어 느 한 스텝 크기의 편차를 말하고, INL은 DNL의 합으 로서 전체 편차를 의미한다. FFT분석을 통해 정상적인 데이터가 출력되는 것을 확인 한 후 출력 값을 테스트 에 사용하였다. 테스트에 사용되는 출력 샘플의 개수가 많으면 많을수록 실제 아날로그 신호에 근접할 수 있기 때문에 보다 더 정확한 DNL과 INL을 얻을 수 있다. 표 5에 DNL과 INL 측정 조건을 나타내었다. DNL과 INL 측정은 MAXIM 사의 자료를 참고하였으며, 아래의 측 정은 11,534,336 샘플을 사용하였다[10~11].
그림 16은 DNL, INL 측정 결과를 그림으로 보여주 고, 표 6은 DNL, INL 측정값을 나타낸 것이다. 논문에 서 수집한 11,534,336 샘플보다 더 많은 샘플을 사용하
그림 16. DNL / INL 측정 결과 파형 Fig. 16. DNL / INL test result waveform.
여 측정해보면 훨씬 더 나은 DNL, INL 값을 얻을 것을 기대할 수 있다[12].
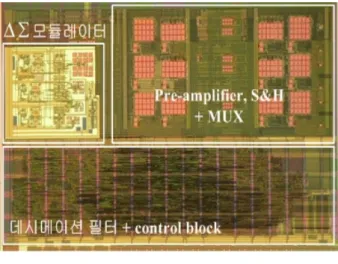
Ⅴ. 레이아웃
그림 17은 설계된 3차 1-bit 이산시간 incremental 델 타-시그마 ADC의 레이아웃 그림이다. 모듈레이터의 면 적은 586 ㎛ × 480 ㎛ (0.28 ㎟)이고, 데시메이션 필터 와 control block 의 면적은 2051 ㎛ × 491 ㎛ (1.007 ㎟) 이다.
Fully-differential의 gain을 얻기 위해서는 레이아웃 에서도 각별히 신경을 써주어야 한다. 아날로그 회로인 증폭기의 트랜지스터와 모듈레이터의 커패시터들은 common-centroid 방식으로 레이아웃 하였다. 서로 완
그림 17. 칩 사진
Fig. 17. Chip photograph.
벽히 대칭 되도록 트랜지스터 및 커패시터 등을 같은 간격과 위치에 레이아웃 하였다[7]. 또한 아날로그 신호 와 디지털 신호의 메탈 라인들은 cross talk 효과를 제 한하기 위하여 최대한 멀리 배치하여 레이아웃 하였고, 모듈레이터의 적분기를 구성하는 OTA는 클럭 생성기 에 의한 substrate 잡음의 영향을 최대한 덜 받기 위해 서 가능한 한 최대로 멀리 배치하였다. 그리고 주변에 남는 공간은 mosfet을 이용하여 decoupling 커패시터를 구현하였다.
Ⅵ. 결 론
본 연구에서는 3차 1-bit 이산시간 incremental 델타 -시그마 ADC를 제안하였다. 센서용 이산시간 incremental 델타-시그마 ADC를 구현하기 위해 동일한 파워소모 대비 높은 DC gain을 갖는 current mirror 방 식의 OTA 기반의 스위치-커패시터 회로 구조와 피드- 포워드 구조를 채택하여 설계하였으며, 디지털 데시메 이션 필터는 accumulator로 구현하였다.
3차 1-bit 이산시간 incremental 델타-시그마 ADC는 TSMC 0.18 ㎛ CMOS 공정으로 제작되었다. LPE 시뮬 레이션 결과 5 ㎑의 신호 대역 내에서 91.64 ㏈의 SNDR 과 ENOB 14.9-bits을 얻었고, 전체 소모된 파워 는 0.941 ㎽ 이다.
또한 칩 성능 측정 결과 87.8 dB의 SNDR과 ENOB 14.3-bits을 얻어서 목표하였던 14-bits ENOB를 만족 하였다. DNL error는 ±0.25 LSB, INL error는 ±0.2 LSB 로 16-bits 해상도를 만족한다.
참 고 문 헌
[1] D. Johns and K. Martin, Analog Integrated Circuit Design, John Wiley & Sons, Inc. 1997 [2] 배성환, 이창기, “고정밀 저속 다중채널 아날로그-
디지털 변환기,” 한국전자통신학회논문지 제3권 제 3호.
[3] J. Markus, J. Silva, G.C. Temes, “Theory and applications of incremental delta-sigma converters,”
IEEE Tran. on Circuits and Systems I, vol.51, no.4, pp.678-690, Apr. 2004.
[4] J. Markus, P. Deval, V. Quiquempoix, J. Silva, G.C. Temes, “Incremental Delta-sigma Structures for DC Measurement : an Overview,”
IEEE 2006 Custom Integrated Circuits Conference (CICC).
[5] S. Rabii and B. A. Wooley, The Design of Low
Voltage, Low Power Sigma-Delta Modulators.
KAP, 1999.
[6] D. Aksin, M. Al-Shyoukh, F. Maloberti , “A bootstrapped switch for precise sampling of inputs with signal range beyond supply voltage,”
IEEE 2005 Custom Integrated Circuits Conference (CICC).
[7] B. Razavi,
Design of Analog CMOS Integrated Circuits.
New York:McGraw-Hill, 2001.
[8] J. Crols and M. Steyaert, "Switched-opamp: An approach to realize full CMOS switched -capacitor filters at very low power supply,”
IEEE J. Solid-State Circuits, vol. 29, pp. 936-
942, Aug. 1994.[9] R. Gregorian, Introduction to CMOS op-amps and comparators. NewYork : John Wiley &
Sons, Inc., 1999.
[10] MAXIM, “Histogram Testing Determines DNL and INL Errors”
[11] MAXIM, “INL/DNL Measurements for High- Speed Analog-to-Digital Converters(ADCs)”
[12] W. Kester, The Data Conversion Handbook, Analog Devices, Inc., 2005, pp. 303-316.
[13] R. J. Baker, W. L. Harry and E. B. David, CMOS Circuit Design, Layout, and Simulation, NY: IEEE Press, 1997.
[14] J. Roh, S. Byun, Y. Choi, H. Roh, Y. Kim, and J. Kwon, “A 0.9-V 60-W 1-Bit Fourth-Order Delta-Sigma Modulator With 83-dB Dynamic Range,” IEEE J. Solid-State Circuits, vol. 43, No. 2, pp. 361- 370, Feb. 2008.
[15] V. Peluso, M. Steyaert, and W. Sansen, “The
저 자 소 개 정 진 영(학생회원)
2010년 한양대학교 전자및통신 공학과 학사 졸업
2012년 한양대학교 전자전기제어 계측공학과 석사 졸업 2012년~현재 삼성전자 근무
<주관심분야 : Oversampled Delta-Sigma A/D Converter 설계>
최 단 비(학생회원)
2012년 한양대학교 전자및통신공 학과 학사 졸업
2012년~현재 한양대학교 전자통 신공학과 석사과정
<주관심분야 : Oversampled Delta-Sigma A/D Converter 설 계>
노 정 진(정회원)
1990년 한양대학교 전기공학과 학사 졸업
1996년 삼성전자 선임 연구원 1998년 미국 Pennsylvania State
University 전기공학 석사 졸업
2001년 Intel. USA, senior design engineer 2001년 University of Taxas at Austin.
컴퓨터공학 박사.
2001년~현재 한양대학교 안산캠퍼스 전자통신 공학과 교수
<주관심분야 : CMOS DC-DC converters 설계, Over-sampling delta-sigma data converters 설계>
Design of Low Voltage, Low Power Sigma-Delta Modulators,” IEEE J. Solid-State
Circuits, vol. 32, No. 7, pp. 943- 952, Jul. 1997.
[16] J. Liang, D.A. Johns, “A Frequency-Scalable 15-bit Incremental ADC for Low Power Sensor Applications”, IEEE International Symposium on Circuits and Systems, May 30th –- Jun. 2nd, 2010, Paris, France, pp. 2418-2421

![Fig. 2. Block diagram and waveforms of first-order incremental ADC [3] (a) Block diagram of the first-order incremental ADC (b) output of the integrator, V (c) output of the integrator, di (d) output of the accumu](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5072619.560158/3.892.466.810.162.557/block-diagram-waveforms-incremental-diagram-incremental-integrator-integrator.webp)
![그림 9. Current mirror OTA 회로 [9]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5072619.560158/6.892.467.808.168.463/그림-current-mirror-ota-회로.webp)
![Fig. 12. Bootstrapped switch circuit[6]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5072619.560158/7.892.487.800.164.443/fig-bootstrapped-switch-circuit.webp)