학 술 논 문
55
적외선카메라를 이용한 다트던지기 운동에서의 제한된 손목관절 움직임 분석
박찬수 1,2 ·박종일 2 ·김광기 1 ·장익규 1 ·김태윤 1 ·이상림 3 ·백구현 4
1국립암센터 융합기술연구부 의공학연구과, 2한양대학교 전자컴퓨터통신공학과
3인제대학교 상계백병원 정형외과, 4서울대학교 의과대학 정형외과학교실
The Motion Analysis of the limited Wrist Joint During Dart-Throwing Motion by Using Infrared Camera
Chan-Soo Park 1,2 , Jong-Il Park 2 , Kwang Gi Kim 1 , Ik-Gyu Jang 1 , Tae-Yun Kim 1 , Sang lim Lee 3 and Goo Hyun Baek 4
1
Biomedical Engineering Branch, Division of Convergence Technology, National Cancer Center
2
Department of Electronics and Computer Engineering, Hanyang University
3
Department of Orthopedic Surgery, Sanggye Paik Hospital, Inje University
4
Department of Orthopedic Surgery, Seoul National University College of Medicine (Received February 17, 2013. Accepted April 25, 2013)
Abstract: Wrist joints consist of irregularly shaped carpal bones and other complicated structures. Thus, evaluating the motion of a wrist joint is a challenging task. In this study, we used an infrared camera to perform a kinematic analysis of a dart-throwing motion. We measured the difference between the movement of a normal wrist and con- strained wrist (wrist with a wrist glove) in the dart-throwing motion with thirty six healthy participants. We measured the ulna flexion - radial extension motion using the attached passive marker and analyzed it using Polygon software and SPSS. The pitch and yaw motions with a glove was bigger than the ones without a glove by 20 and 15 degrees, respectively. On the other hand, the roll motion without a glove was bigger than the one with a glove by 7 degree.
Wilcoxon signed rank test (p < 0.05) confirmed that there are significant differences between the motion with and without a glove. It was found that the magnitude of the pitch and yaw motion with a constrained wrist joint toward radial extension in dart-throwing motion is smaller than the one with a normal wrist joint. However, a normal wrist joint showed a bigger movement in the roll direction.
Key words: Wrist joint, Dart -throwing motion, Infrared camera
I. 서 론
퇴행성 손목관절염은 수근관절의 움직임에 따라 발생하는 충격을 흡수하지 못하여 다양한 원인에 의해 관절에 염증이 생겨 통증을 유발하는 질환으로 손목관절염을 갖고 있는 환
자의 수근관절 움직임을 제한한다[1]. 이러한 퇴행성 손목관 절염을 치료하는 방법 중 가장 효과적인 방법은 수술적 방 법을 적용하여 환자의 통증을 감소 시키고 손목관절의 움직 임을 원활히 하는데 주요한 목적을 두고 있다. 따라서 적절 한 치료계획을 수립하기 위해서는 복잡한 손목관절의 운동 을 분석하고 이에 따른 손목관절의 역학적 분석이 필요하고 이를 정량화 하기 위한 방법이 필요하다[2-4].
앞서 언급한 손목관절(wrist joint)은 인체를 구성하는 근 골격계 중 다수의 뼈와 근육, 인대 등으로 구성이 되어 있 으면서 중수근관절, 요수근 관절, 원위요척관절 등과 함께 Corresponding Author : Kwang Gi Kim
Biomedical Engineering Branch, Division of Convergence Technology, National Cancer Center
TEL: +82-31-920-2246 / FAX: +82-31-920-2254
E-mail : [email protected]
56
복합적인 관절을 이루면서 인체에서 가장 많은 운동을 하는 관절이다. 또한 수근골(carpal bone)과 연결되어 중수골 (metacarpal bone) 의 운동을 제어하는 역할을 하고 있기 때문에 손목관절의 움직임에 따라서 수근부를 구성하는 수 근골의 운동에도 영향을 미친다[5-8].
손목관절은 60-70
o의 신전(extension)과 70-80
o의 굴곡 (flexion), 20
o의 요측변위(radial deviation) 및 30
o정도의 척측변위(ulna deviation) 그리고 요척관절(radial joint)과 함께 작용하여 80-90
o의 회외(supination), 회내(pronation) 의 움직임이 가능한 만능관절(universal joint)로 이러한 수 근관절은 인간의 활동에 많은 부분을 차지한다[6-7].
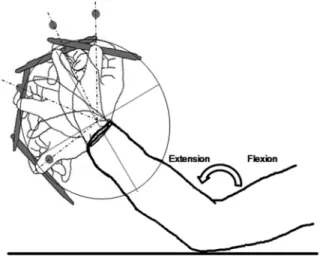
인체의 손목관절의 움직임은 동물과 다르게 도구나 무기 사용, 던지기 등 인간만이 할 수 있는 특징적인 움직임을 가 능하게 하여 원시인류의 생존에 있어서부터 현재까지 중요 한 동작으로 추정되었다[5,8]. 신전으로의 움직임이 발생 할 때 요측변위가(radial deviation) 함께 일어나게 되는데 이 를 일반적으로 ‘요측신전(radial extension)’이라 하며 굴 곡 운동에서 발생 되는 척측변위의(ulnar deviation) 운동 을 ‘척측굴곡(ulna flexion)’이라고 한다. 요측 신전부터 척 측 굴곡까지의 운동은 손목 관절의 회전 운동에 있어서 가 장 적은 근육의 힘으로 관절의 움직임을 가능하게 하며, 이 러한 요측신전과 척측굴곡이 이루는 시상면(sagittal plane) 의 이루는 각이 약30-45
o에 이르게 되는데 이러한 동작을 다트던지기 운동이라고 한다[9-13](그림 1 참조).
다트던지기 운동은 임상에서 손목관절의 정상적인 움직임 을 판단하는 기준이 되며, 수근골의 골절 및 질환의 치료, 관절운동의 재활상태 등을 진단하는데 사용된다. 이처럼 다 트던지기 운동에서의 손목관절의 움직임을 통해 수근골의 역학적 움직임을 이해할 수 있기 때문에 손목관절의 움직임 을 정밀하게 분석하려는 많은 연구들이 이루어 졌다[14-19].
다트던지기 운동을 기반으로 수근골의 움직임을 측정하고 자 하는 기존의 연구방법으로는 일반적으로 in vitro와 in vivo 방법이 있다. In vitro방법은 사체표본(Cardever speci- men) 을 대상으로 수근부의 피부표면에 핀(Pin), 금속 표지자 등을 부착 또는 이식하여 움직임을 측정하는 방법으로 외형 적인 운동상태는 확인이 가능하지만 측정 표시자(Indicator) 로 인해 발생하는 부자연스러운 움직임에서 측정된 데이터는 높은 오차율로 인해 측정부위에 대한 정확도가 높지 않았다 [20-21]. in vivo 방법은 최근에 많이 사용되는 방법으로 영상 의학의 발달로 인해 피험자를 대상으로 컴퓨터 단층 촬영 (Computed tomography, CT) 장비나 X-ray등의 방사선 영상 촬영장비 등을 이용하여 수근부의 움직임을 2차원 또는 3차 원으로 촬영하여 운동을 분석하는 방법으로 자연스런 수근부 의 움직임에 대한 측정이 가능하며 환경적인 요인을 최소화하 여 피험자로부터 객관적인 데이터를 얻는데 용이하다[22-24].
앞서 언급한 다수의 연구를 통해 손목관절과 수근골의 움 직임은 유기적인 관계로 이루어 지고 있다는 사실은 이미 널리 알려져 있으나, 다트던지기 운동에서의 손목관절의 움 직임을 보다 객관적으로 측정하기 위한 새로운 측정방법들 이 제안되고 있다.
인체의 움직임을 분석하기 위한 방법들 중 전통적으로 전 자기식 모션센서를 이용한 전자기식 모션 획득(Electro- magnetic motion capture) 방법의 경우 공간해상도가 낮 으며 측정부위에 따라 다수의 마커를 근접하게 부착하기 어 려울 뿐만 아니라, 전류를 공급하기 위한 선으로 연결되어 있거나 배터리를 필요로 하는 단점이 있다[25].
또한, 자이로 센서(Gyro sensor)를 이용 한 접근방법의 경우, 측정부위에 센서를 장착하여 움직임에 대한 3축의 방 위각을 알 수 있지만 병진 동작을 확인하기 위해서는 추가 적인 센서가 필요하며 다른 방법에 비해 상대적으로 큰 오 차를 보인다[26]. 최근에는 이러한 방법들의 한계를 극복하 기 위해 소형 마커(Passive marker)를 부착하여 적외선 카 메라(Infrared camera) 촬영을 통해 인체의 움직임을 측정 하고자 하는 연구들이 활발하게 진행 되어오고 있다[27-30].
따라서 본 연구에서는 손목관절의 역학적 움직임을 측정 할 수 있는 다트던지기 운동을 측정 모델로 하여 퇴행성 손 목관절질환으로 인해 손목관절의 제한된 움직임을 하는 가 상의 비교군을 설정하여 정상군과의 역학적 움직임을 3차원 적외선 카메라를 이용하여 측정하고 분석하여 손목관절의 움직임을 정량적으로 분석하고자 하였다.
II. 대상 및 방법
1. 연구 대상
본 연구에서는 과거 수근부 및 수근관절의 질환이 없으며
그림 1. 다트던지기운동Fig. 1. Dart-throwing motion
57 정상적인 움직임이 가능한 성인남성 17명과 성인여성 19명
을 대상으로 연구참여 동의를 받은 후 수근관절에 대한 움 직임을 분석하기 위해 다트던지기 운동을 시행하였다(표 1 참조).
2. 연구 방법
피험자를 대상으로 하는 실험에 앞서 6대의 적외선 카메 라(MX30.3 Milion pixels motion capture camera.
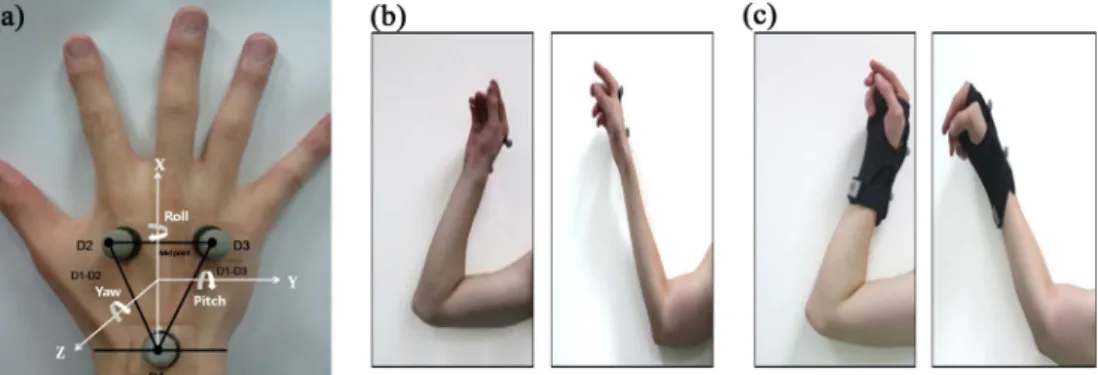
Oxford Metrics Inc. UK) 를 피험자 주위에 배치한 후, 경 사계(Clinometer)와 각도기(Protractor)를 이용하여 Roll (X 축 중심)-Pitch(Y축 중심)-Yaw(Z축 중심)의 회전운동 축 에서 마커의 움직임을 측정하기 위한 카메라 교정(Cali- bration) 작업을 통해 0.02~0.39
o의 오차범위 이내에서의 정 확한 측정이 가능하도록 하였다(그림 2 참조).
손목관절의 움직임에 차이를 두어 측정방법에 대한 객관 성을 입증하기 위해 동일한 피험자를 대상으로 정상적인 다 트던지기 운동을 하는 실험군과 제한된 상태에서의 다트던 지기 운동을 시행하는 비교군으로 나누어 실험을 진행하였 다. 비교군은 동일 피험자에 대해 손목보호장갑(Glove)를 착 용하여 손목관절의 움직임에 제한을 두었다.
우측 수근부의 요골 끝단의 중심지점(D1)과 이를 기준으 로 두번째(D2)와 네번째 중수골의 끝단(D3)을 측정부로 정 의하였다(그림 3(A) 참조). 피험자의 전완골이 굴곡상태에 있을 때(다트던지기 운동의 초기자세)에 D1, D2, D3로 정
의된 마커의 위치 측정하고 계산하여 3차원 공간상의 지역 좌표계(Local coordinates)의 좌표축을 정의하고 피험자로 부터 다트를 던지는 형태의 움직임을 시행하도록 하여 다트 를 잡은 상태에서의 Ligid body 상태에서의 손목관절의 움 직임을 측정하였다.
전완골이 신전운동으로 까지 향하는 다트던지기 운동을 통해 6대의 적외선 카메라가 위치한 전역 좌표계(World coordinates) 에서의 지역 좌표계의 변화를 측정하여 손목관 절의 신전에서 굴곡까지의 움직임을 측정하였다. D2와 D3 사이를 잇는 선분에 대한 이등분점을 중심으로 D1을 잇는 벡터를 3차원 공간상의 지역 좌표계의 X축으로 정의 하였 다. 다음으로 외적(cross product)의 성질을 이용하여 D1- D2 벡터와 D1-D3 벡터의 외적을 구하여 공통으로 수직한 벡터를 구하고 이것을 3차원 공간을 움직이는 지역 좌표계 의 Z축으로 설정 하였으며 앞서 구한 X, Z축에 외적의 성 질을 이용하여 두 축에 동시에 수직인 벡터를 구하고 이를 Y 축으로 설정하였다.
그림 2. 적외선 카메라 실험
Fig. 2. Infrared camera coordinate system test
표 1. 측정 피험자 조건표 Table 1. Subject table
No. Gender Age Dominant
side Height Weight
1 Male 27.2(± 4.3) Right 176.4(± 3.4) 74.1(± 5.1) 2 Female 24.3(± 2.7) Right 162.3(± 3.6) 52.4(± 2.7)
*Data presented as mean( ± standard deviation).
그림 3. (A) 적외선 마커 위치설정 (B) 다트던지기 운동의 굴곡(좌)-신전(우) 운동 (C) Glove 착용 후 다트던지기 운동의 굴곡(좌)-신전(우) Fig. 3. (A) Passive marker positioning (B) Flexion(left)-Extension(right) motion of dart throwing motion (C) Flexion(left)- Extension(right) motion of dart throwing motion wearing glove
58
또한, XYZ축의 벡터가 모두 모인 교점을 지역 좌표계의 원 점(origin)으로 하여 3차원 공간상의 움직임을 측정하는데 있 어 자유로운 움직임의 측정이 가능하도록 하였으며 이번 연 구에서 손목보호장갑을 이용하여 실험을 하는데 있어 손목동 작의 움직임이 제한 되므로 주관절(elbow joint)이 보상동작 을 취할 것으로 예상되어 지역 좌표계의 방향(Orientation) 이 아닌 병진운동 좌표를 이용하여 구별이 되도록 하였다.
이와 같이 3개의 적외선 마커를 부착하여 정상적인 수근 관절의 움직임이 가능한 상태에서의 요골과 척골의 굴곡-신 전 운동을 통해 다트던지기 운동을 측정하는데 있어 메트로 놈(Metronome)을 이용하였다. 이번 연구에서 사용하는 적 외선카메라의 경우 1초에 25프레임(Frame)의 촬영이 가능 한 카메라로 1회 운동을 100프레임으로 하여 약4초 동안 다트던지기 운동의 촬영이 가능하도록 설정하였으며 동일한 반복운동의 측정을 위해 피험자로부터 4초의 간격으로 설정 된 메트로놈의 반복되는 소리를 통해 1회(100프레임)의 다 트던지기 운동이 가능하도록 하였다. 또한 제한된 상태에서 의 움직임을 측정하기 위해 동일한 피험자를 대상으로 손목 보호장갑을 착용하여 동일한 위치에 적외선 마커를 부착하여 동일한 조건에서 실험이 가능하도록 하였으며, 다트던지기운 동을 총 10회(1000프레임) 반복하도록 하여 측정 데이터의 객관성을 유지하도록 측정하였다(그림 3(B,C) 참조).
적외선 카메라를 이용하여 전역 좌표계(Global coord- inates) 를 기준으로 적외선 마커가 부착된 위치에서의 지역 좌표계의 공간상 위치변화를 측정하고 그 결과를 종합하여 수근관절의 움직임을 Polygon(version 3.1, Vicon Motion Systems-Apache software foundation) 프로그램을 이용 하여 데이터를 수집하였으며 측정데이터의 통계적 분석을 위해 SPSS(13.0 for windows, SPSS Inc)를 이용하였다.
3. 데이터 분석
적외선 카메라를 이용하여 수집된 피험자 개인의 데이터
는 10회의 반복운동(그림 4(A)참조) 중 일정하게 반복되는 주기(Cycle)의 1회 운동(100프레임)에서 Roll-Pitch-Yaw 축의 각도변화를 측정하여 정상상태와 손목보호장갑을 착용 하여 손목관절의 움직임을 제한한 상태와의 차이를 비교 분 석하였다(그림 4(B) 참조).
III. 결 과
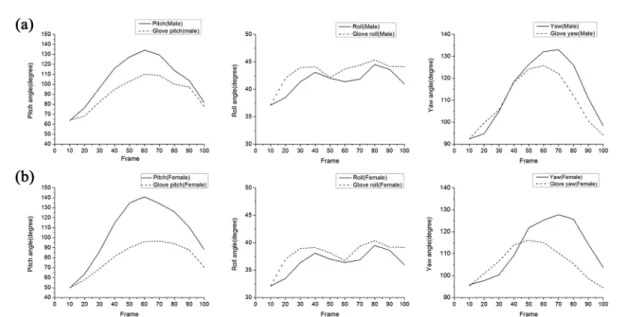
그림 5(A)(B)는 100프레임 동안에서 다트던지기 운동을 10 회 시행하였을 때 손목관절에서 발생하는 Roll-Pitch- Yaw 의 평균 움직임에 대해 남자 피험자, 여자 피험자의 측 정데이터를 나타낸 그래프이다. Pitch의 경우 손목보호장갑 을 착용하지 않았을 때 남성 피험자에서는 최대 25
o, 여성 피험자에서는 최대 50
o의 차이가 발생하였다. Roll의 경우 남 여 피험자 모두에서 손목보호장갑 착용 후의 움직임이 큰 것으로 나타났으며 남성 피험자에서 Roll의 움직임이 더 큰 것으로 나타났다. Yaw의 움직임에서는 Pitch의 결과와 동 일하게 손목보호장갑을 착용하지 않았을 때의 움직임이 컸 다. 남성피험자는 최대 10
o, 여성피험자에서는 최대 15
o의 차 이가 나타났으며 남 여 피험자 모두 손목보호장갑을 착용 하 였을 때 최대 움직임이 착용하지 않았을 때보다 5~10프레 임 앞선 구간에서 나타났다.
그림 6은 전체 피험자 35명을 대상으로 다트던지기운동 을 시행한 결과의 평균과 평균과 표준편차의 합을 나타낸 그래프이다. Pitch에서의 측정결과를 나타낸 그래프의 경우 평균과의 표준편차는 약 5
o정도로 나타났으며, 손목보호장 갑을 착용하지 않고 다트던지기 운동을 시행한 결과 60프 레임까지 최대 140
o까지의 움직임이 발생하는 것으로 측정 되었고 손목보호장갑을 착용하고 측정한 결과 동일한 프레 임에서 최대 100
o까지의 움직임이 발생한 것으로 확인되었 다. Roll의 경우 평균과의 표준편차는 약 3
o정도로 나타났 으며, 전체적으로 40프레임까지의 움직임이 증가한 후 감소
그림 4. (A) 다트던지기 운동의 10회 반복운동 Roll-Pitch-Yaw의 각도 변화 (B) 10회의 다트던지기운동 중 1회에서의 Roll-Pitch-Yaw 의 각도 변화
Fig. 4. (A) Angular variation of Roll-Pitch-Yaw in 10th repeat motion of dart-throwing motion (B) Angular variation of Roll- Pitch-Yaw in 1st motion of dart-throwing motion
59
하는 경향을 보이다가 50~60프레임에서 다시 증가하여 최 대 45
o까지의 움직임이 발생하는 것으로 확인 되었다. 또한 손목보호장갑 착용여부와 상관없이 최대 움직임에는 큰 차 이가 발생하지 않은 반면, 착용 후의 움직임이 큰 것으로 나 타났다. Yaw에서는 평균과의 표준편차는 약 6
o정도로 나타 났으며, 60~70프레임까지 움직임이 증가한 후 착용 전과 후 에 약 15
o의 최대 움직임의 차이가 발생하였다.
표 2는 다트던지기 운동에서 손목보호장갑의 착용여부에 따른 Roll-Pitch-Yaw의 운동에 차이가 있는지를 비교하기 위해 전체 측정데이터에 통계적 방법을 적용하여 나타낸 결 과이다. 데이터분석은 비모수 검정 방법인 Wilcoxon signed rank test 방식을 이용한 통계학적 분석결과를 이용하여 Roll-Pitch-Yaw 의 유의한 차이가 있는지 확인 하였으며 데 이터의 분석결과 Pitch의 운동에서 손목보호장갑 착용 (Glove-pitch)의 경우 Z-score가 −8.678로 나타났으며 Roll 의 경우 −8.638, Yaw의 경우 −5.933으로 나타났다(p <
0.05).
IV. 고 찰
손목관절의 움직임은 인간의 활동에 있어서 많은 비중을 차지하는 인체의 운동 중 하나이다. 다양한 방향의 운동이 가능함과 동시에 수근관절의 움직임을 위해서는 수근부의
그림 5. 손목보호장갑 착용 유무에 따른 Roll-Pitch-Yaw 각도 변화 측정((A) 남자 피험자 (B) 여자 피험자)Fig. 5. Angle validation measure in frame of roll-pitch-yaw according to non-glove and glove test((A) Male subject (B) Female subject)
그림 6. 전체 피험자를 대상으로 손목보호장갑 착용 유무에 따른 Roll-Pitch-Yaw 각도 변화 측정
Fig. 6. Total angle validation measure in frame of Roll-pitch-yaw according to non-glove and glove test
표 2. Wilcoxon signed-ranks test(p < 0.05) Table 2. Wilcoxon signed-ranks test(p < 0.05)
Pitch- Glove pitch
Roll- Glove roll
Yaw- Glove yaw
Z −8.678a −8.638b −5.933a
Asymp.Sig.(2-tailed) .01 .01 .01
a. Based on positive ranks
b. Based on negative ranks
C. Wilcoxon Signed Ranks Test
60
다양한 조직이 유기적으로 움직여야 정상적인 기능을 수행 할 수 있다. 이러한 손목관절은 불규칙한 골격의 크기와 위 치에 따라 복잡한 형태를 보이며 관절구조를 파악하는데 많 은 어려움이 있었다. 이와 함께 수근부에서의 힘의 전달이 나 수근골의 움직임 등 손목관절의 역학적 운동을 해석하기 위해 다양한 연구가 시행되었다[31-32].
손목관절의 움직임을 측정하기 위해 사체표본의 표시자를 이용하여 측정하는 침습적인 방법(Invasive method)부터 영상의학 장비를 이용하여 수근관절의 움직임을 촬영하여 분석하는 방법에 이르기까지 다양한 방법이 이용되었다[20- 24]. 이러한 측정방법에 있어서 피험자의 일상생활에 있어 서의 자연스러운 손목관절의 촬영을 위해서는 수직 및 직각 의 운동 뿐만이 아닌 요골의 신전운동에서부터 척골의 굴곡 운동 까지를 포함하여 척측변위와 요측변위에서 발생하는 손목관절의 움직임을 측정해야 했다. 이를 위해 사용 되는 측정모델인 다트던지기 운동은 적은 힘의 전달로 대부분의 수근관절의 움직임을 가능하게 하며, 다트를 쥐는 형태를 취 하여 요골과 척골 사이의 집는 형태를 취함으로써 도구를 쥐었을 때 수관절의 변화까지 측정이 가능하다[33]. 근위 수 근열(proximal carpal row)과 원위 수근열(distal carpal row) 사이의 중수근 관절(midcarpal joint)을 시작으로 일 어나는 손목 관절의 운동은 각 손목관절의 기능과 위치에 따라 다양한 방향의 운동이 존재하여 유연한 움직임을 가능 하게 한다. 이러한 움직임을 통해 손목의 움직임은 굴곡 (flexion) 과 신전(extension)을 포함한 회외(supination), 회내(pronation) 등의 운동을 하게 되는데 이러한 움직임은 손목관절을 지지하는 요골과 척골의 형태에 따라 관절의 움 직임에 제한이 생긴다.
일반적으로 요골(Radius)의 경우 바로 옆에 위치한 척골 (ulna) 이 위치해 있으며 측면에서 측정하였을 때 척골의 표 면에서 요골의 경상돌기(styloid process)가 9~12 mm 높 으며 요골경사(Radial inclination)는 약 15~25
o의 각을 이 루면서 요골이 척골에 비해 길고 비스듬한 형태를 보이는 구 조를 갖고 있다. 이러한 구조로 인해 요골과 척골의 원위부 와 근위 수근열들 사이의 경계면에서 이루어지는 수근골의 움직임은 약 110~150
o의 범위로 움직이는데 이러한 범위에 서의 움직임은 요골이 비스듬한 형태로 위치한 상태에서의 다른 축으로의 움직임이 발생한다면 이러한 움직임을 해석 하는데 3차원에서의 움직임을 해석하는 방법이 필요하다.
본 연구의 결과와 같이 수근관절의 굴곡과 신전운동 사이 에서의 움직임에는 X, Y, Z 축에서의 3차원 움직임(Roll- pitch-Yaw) 이 발생하는데 이러한 움직임은 수근관절의 구 조와 특징에 따른 움직임으로 각각의 움직임 변화에 따른 변화는 3차원 공간에서의 변화를 의미하기 때문에 피험자를 대상을 하는 실험에서 카메라의 측정영역에 대해 전역좌표
를 설정하고 피험자에게 부착된 마커의 변화를 지역 좌표계 의 변화로 측정하여 수근관절의 움직임을 측정 하였다.
신전부터 굴곡운동에 이르는 실험에서 신전으로의 움직임 이 진행되면서 Pitch 움직임이 가장 큰 것으로 확인되었으 며 Yaw의 움직임 또한 Pitch의 움직임과 유사한 경향을 보 이며 특정지점 이후의 움직임이 감소하는 구간 역시 유사한 경향을 보였다. 이를 통해 손목관절의 움직임에 있어서 Pitch 와 Yaw의 움직임이 공존하는 것을 확인 할 수 있었 으며 이는 요골의 경상돌기로 인해 비스듬하게 위치한 척골 이 손목관절의 굴곡운동을 지속하기 위해 Pitch의 움직임에 따라 Yaw의 움직임을 발생시켜 요골과 척골에 동일한 힘을 분배함으로써 손목관절이 움직일 때 한쪽으로 힘이 치우치 지 않도록 균형을 맞추기 위한 것으로 추측된다. Roll의 경 우에는 다트던지기 운동에서 신전운동에서 굴곡운동이 시작 되는 10~40프레임과 굴곡운동이 끝나기 시작하는 80~100 프레임 구간에서 움직임이 증가하고 40~80프레임 구간에서 는 움직임이 감소되는 것을 통해 굴곡-신전 사이의 구간인 40~80 프레임 에서는 Pitch와 Yaw의 움직임이 최대로 움 직이면서 손목관절의 회전운동이 상대적으로 제약되어 Roll 의 움직임이 감소 되지만 Pitch와 Yaw의 움직임이 급격하 게 감소하는 구간에서는 다시 회전운동이 증가하는 것을 확 인 할 수 있었는데 Pitch와 Yaw의 움직임의 변화폭 크게 증가하거나 감소하는 구간에서만 Yaw의 운동이 증가 되어 진다는 사실을 확인 할 수 있었으며, 이는 손목관절의 회전 운동은 가장 적은 근육의 힘으로 움직인다는 기존의 논문의 결과에 따라 Pitch와 Yaw의 움직임을 가능하게 하는 손목 관절의 근육의 힘이 Yaw의 움직임을 가능하게 하는 근육의 힘보다는 크며, 움직임 또한 제약할 수 있는 정도의 회전력 을 갖고 있다고 할 수 있다[34]. 또한 남자와 여성 피험자의 데이터 그래프를 통해 여성 피험자들의 움직임이 남성 피험 자들과 유사한 경향을 보이기는 하지만 최대 움직임에서는 약10
o정도의 차이를 보이는 것을 확인 할 수 있다. 이는 기 존에 수근골의 움직임과 관련한 연구에서 굴곡-신전 운동 구 간에서 남성이 여성보다 손목관절의 움직임이 크다는 연구 결과와 동일 하였으며 남성과 여성 피험자들 사이에서 손목 관절의 움직임이 발생하는 이유는 성별에 따라 손목관절을 포함한 수근골의 크기의 차이로 인한 인체의 구조적 특징에 의해서 발생하는 것이라고 언급하였다[22].
정상적인 움직임이 가능한 피험자를 대상으로 손목보호장
갑을 착용하여 손목관절에 동일한 환부가 있다는 가정하에
실행 된 실험에서 관절의 움직임을 제한시킨 조건에서의 움
직임이 평균적으로 Pitch에서는 최대 40
o, Roll 에서는 3
o,
Yaw 에서는 20
o정도의 움직임 낮게 측정 되었으며, 상대적
으로 남성 피험자 보다는 여성 피험자에서 각각의 움직임 차
이가 큰 것으로 확인이 되었다. 또한 Pitch와 Yaw의 경우
61 에는 손목보호장갑을 착용하지 않았을 때의 움직임이 큰 것
으로 측정 된 반면, Roll의 경우에서는 손목보호장갑을 착용 한 경우의 움직임이 다소 큰 것으로 나타났다. 관절이 비틀 리면서 발생하는 Roll의 움직임 같은 경우는 다트던지기 운 동에서 굴곡과 신전의 운동 변화가 크기 때문에 전체적으로 움직임이 작았으며 손목보호장갑을 착용한 상태에서 Pitch 와 Yaw의 움직임이 제한되었기 때문에 Roll의 회전력을 제 어하지 못하고 오히려 Roll의 움직임이 크게 작용하여 굴곡 운동을 진행하기 위한 힘을 전달한 것으로 추측 된다.
기존의 적외선 카메라와 마커를 이용한 연구의 경우 전역 좌표계를 기준에서의 움직임을 측정한 것이 아닌 지역 좌표 계에서의 손목관절의 움직임을 측정하였으며, 수근관절의 움 직임을 측정하기 위해 임상에서 보편적으로 알려진 다트던 지기 운동을 사용하지 않고 팔꿈치를 고정한 상태에서의 수 근부만을 움직여 자연스러운 손목관절의 움직임을 구현하지 못하였다는 제한점이 있었다[35]. 이에 반해, 본 연구의 경 우 임상에서 수근부와 관련된 근골격계 질환에서 예후를 판 단할 때 사용하는 표준 모델인 다트던지기 운동을 통해 자 연스런 관절의 움직임을 구현하였으며 이를 전역 좌표계를 기준으로 지역 좌표계 간의 움직임을 측정하여 기존의 연구 와의 차별성을 두었다. 임상에서는 손목관절의 움직임을 통 해 환자의 치료상태를 확인하기 때문에 다트던지기 운동에 있어서의 정확한 데이터의 획득이 무엇보다 중요하며 보다 객관성 있는 데이터의 측정 방법이 요구된다. 따라서 본 연 구에서는 이러한 측면을 보완하기 위해 동일한 피험자들을 대상으로 자유로운 움직임을 가능하게 하였으며 주관적, 환 경적 변수를 최대한 배제하기 위해 적외선 카메라와 마커를 이용한 손목관절의 움직임을 측정하는 방법을 제안 하였다.
동일한 피험자를 대상으로 손목보호장갑의 착용 여부에 따라 손목관절에 질환이 있는 경우와 정상적인 움직임이 가 능한 경우를 가상으로 설정하였으며 두 조건에서 다트던지 기 운동이 가능하였기 때문에 실험 결과에서 각각의 움직임 에서 유의한 차이가 발생하지 않을 것이라는 가설을 설정 하였다. 표 2에서 나타난 측정 데이터에 대한 Wilcoxon signed-rank test 를 이용한 통계학적 분석 결과에 따르면 Roll-Pitch-Yaw 의 세가지 경우 모두 유의 확률이 유의 수 준보다 작으므로 통계적으로 유의하며(P < 0.05), Z-score 의 측정데이터에 대한 통계값이 0에 가까다는 것은 양의 순 위와 음의 순위의 합이 비슷하다는 의미로 Glove착용 여부 에 따라 측정된 두 데이터의 차이가 적다는 것을 나타내지 만 본 실험의 결과를 따르면 모든 Z-score가 0에서부터 멀 어진 수치로 측정 되어 순위합의 차이가 큰 것으로 확인 되 었으며 이러한 결과는 각 표본의 검정에 유의한 차이가 없 을 것이라는 가설이 기각되어 손목보호장갑의 착용에 따른 다트던지기 운동은 유의한 차이가 있다고 할 수 있다. 또한
손목관절에서 발생하는 3축의 움직임을 측정하여 해부학적 구조에 따른 힘의 전달 및 방향에 대한 예측 및 추정을 가 능하게 하였다.
하지만 보다 정확한 관절의 움직임 측정을 위해서는 본 연구에서 측정한 관절 움직임 이외에 근육의 수축 및 이완 에 따른 힘이나 모멘트의 변화와 같은 운동역학적 변수, 마 커의 위치를 다양하게 변화시켜 상완골 관절부터 손목관절 까지의 움직임을 측정하여 다양한 변수를 고려해야 한다는 점은 본 연구의 한계라고 할 수 있다. 또한 측정 피험자 수 의 증례로 인해 데이터의 정량화가 이루어지지 못 하였다는 점은 추후 개선해야 할 점이다.
이러한 측면들이 보완될 수 있다면 본 연구에서 제시한 방법은 향후 손목관절 질환의 예후 및 치료 계획에 있어 환 자들의 공통된 패턴을 연구하고 분석하는데 있어 객관적 데 이터를 제공 할 것으로 기대 되며, 다트던지기 운동에 대한 연구에 다양하게 응용될 수 있을 것으로 예상된다. 더욱이 제시된 측정 방법이 3차원 의학영상 장비를 이용한 동작분 석 연구에 활용 되어진다면 인체의 다양한 움직임을 측정하 는데 있어 2차원 분석 방법보다 더욱 신뢰성있는 결과를 얻 을 수 있을 것이라 예상된다.
References
[1] R. P. Calfee, E. L. Leventhal, J. Wilkerson, D. C. Moore, E.
Akelman, and J. J. Crisco, “Simulated radioscapholunate fusion alters carpal kinematics while preserving dart-thrower's motion,” The Journal of hand surgery, vol. 33, pp. 503-510, 2008.
[2] A. Minami, T. Ogino, and M. Minami, “Limited wrist fusions,” The Journal of hand surgery, vol. 13, pp. 660-667, 1988.
[3] J. D. Krakauer, A. T. Bishop, and W. P. Cooney, “Surgical treatment of scapholunate advanced collapse,” The Journal of hand surgery, vol. 19, pp. 751-759, 1994.
[4] A. W. Bach, E. E. Almquist, and D. M. Newman, “Proximal row fusion as a solution for radiocarpal arthritis,” The Jour- nal of hand surgery, vol. 16, pp. 424-431, 1991.
[5] J. Ishikawa, W. P. Cooney, G. Niebur, K. N. An, A. Minami, and K. Kaneda, “The effects of wrist distraction on carpal kinematics,” The Journal of hand surgery, vol. 24, pp. 113- 120, 1999.
[6] H. Moritomo, T. Murase, A. Goto, K. Oka, K. Sugamoto, and H. Yoshikawa, “In vivo three-dimensional kinematics of the midcarpal joint of the wrist,” The Journal of Bone & Joint Surgery, vol. 88, pp. 611-621, 2006.
[7] S. Yoshioka, Y. Okuda, K. Tamai, Y. Hirasawa, and Y. Koda,
“Changes in carpal tunnel shape during wrist joint motion MRI evaluation of normal volunteers,” The Journal of Hand Surgery: British & European Volume, vol. 18, pp. 620-623, 1993.
[8] J. J. Crisco, J. C. Coburn, D. C. Moore, E. Akelman, A. P. C.
Weiss, and S. W. Wolfe, “In vivo radiocarpal kinematics and
62
the dart thrower's motion,” The Journal of Bone & Joint Sur- gery, vol. 87, pp. 2729-2740, 2005.
[9] S. W. Wolfe, J. J. Crisco, C. M. Orr, and M. W. Marzke, “The dart-throwing motion of the wrist: is it unique to humans?,”
The Journal of hand surgery, vol. 31, pp. 1429-1437, 2006.
[10] W. H. Short, F. W. Werner, J. K. Green, M. M. Weiner, and S.
Masaoka, “The effect of sectioning the dorsal radiocarpal lig- ament and insertion of a pressure sensor into the radiocarpal joint on scaphoid and lunate kinematics,” The Journal of hand surgery, vol. 27, pp. 68-76, 2002.
[11] R. A. Berger, R. D. Crowninshield, and A. E. Flatt, “The three-dimensional rotational behaviors of the carpal bones,”
Clinical Orthopaedics and Related Research, vol. 167, pp.
303, 1982.
[12] R. A. Berger, “The anatomy of the ligaments of the wrist and distal radioulnar joints,” Clinical orthopaedics and related research, vol. 383, pp. 32-40, 2001.
[13] S. K. Sarrafian, J. L. Melamed, and G. M. Goshgarian, “Study of wrist motion in flexion and extension,” Clinical ortho- paedics and related research, p. 153, 1977.
[14] R. A. Kaufmann, H. J. Pfaeffle, B. D. Blankenhorn, K. Sta- bile, D. Robertson, and R. Goitz, “Kinematics of the Midcar- pal and Radiocarpal Joint in Flexion and Extension: An In Vitro Study,” The Journal of hand surgery, vol. 31, pp. 1142- 1148, 2006.
[15] A. J. Thurston and J. K. Stanley, “Dowel Fusion of the Scapho-Trapezio-Trapezoid Joint: A Description of a New Technique,” Hand Surg, vol. 4, pp. 125-129, Dec 1999.
[16] R. Meier, K. J. Prommersberger, and H. Krimmer, “Scapho- trapezio-trapezoid arthrodesis (triscaphe arthrodesis)” Hand- chir Mikrochir Plast Chir, vol. 35, pp. 323-7, Oct 2003.
[17] J. Bare, A. J. Graham, and S. K. Tham, “Scaphotrapezial joint arthroscopy: a palmar portal,” J Hand Surg Am, vol. 28, pp.
605-9, Jul 2003.
[18] P. Voche, C. Bour, and M. Merle, “Scapho-trapezio-trapezoid arthrodesis in the treatment of Kienbock's disease. A study of 16 cases,” J Hand Surg Br, vol. 17, pp. 5-11, Feb 1992.
[19] D. F. Massimini, J. J. P. Warner, and G. Li, “Non-invasive de- termination of coupled motion of the scapula and humerus-An in-vitro validation,” Journal of Biomechanics, vol. 44, pp. 408- 412, 2011.
[20] M. Kobayashi, R. A. Berger, L. Nagy, R. L. Linscheid, S.
Uchiyama, M. Ritt, et al., “Normal kinematics of carpal bones:
a three-dimensional analysis of carpal bone motion relative to the radius,” Journal of biomechanics, vol. 30, pp. 787-793, 1997.
[21] H. Savelberg, J. Kooloos, A. De Lange, R. Huiskes, and J.
Kauer, “Human carpal ligament recruitment and three- dimensional carpal motion,” Journal of orthopaedic research, vol. 9, pp. 693-704, 1991.
[22] C. Neu, J. Crisco, and S. Wolfe, “In vivo kinematic behavior
of the radio-capitate joint during wrist flexion–extension and radio-ulnar deviation,” Journal of biomechanics, vol. 34, pp.
1429-1438, 2001.
[23] S. W. Wolfe, C. Neu, and J. J. Crisco, “In vivo scaphoid, lunate, and capitate kinematics in flexion and in extension,”
The Journal of hand surgery, vol. 25, pp. 860-869, 2000.
[24] J. J. Crisco, R. D. McGovern, and S. W. Wolfe, “Noninvasive technique for measuring in vivo three-dimensional carpal bone kinematics,” Journal of orthopaedic research, vol. 17, pp. 96-100, 2005.
[25] T. Molet, R. Boulic, and D. Thalmann, “A real time anatom- ical converter for human motion capture,” in EGCAS’96:
Seventh International Workshop on Computer Animation and Simulation, 1996.
[26] T. L. Grigorie and D. G. Sandu, “The influences of the gyro sensors' errors on the attitude calculus,” in ELMAR, 2007, 2007, pp. 85-92.
[27] Z. M. Li, L. Kuxhaus, J. A. Fisk, and T. H. Christophel,
“Coupling between wrist flexion–extension and radial–ulnar deviation,” Clinical Biomechanics, vol. 20, pp. 177-183, 2005.
[28] A. G. Kirk, J. F. O'Brien, and D. A. Forsyth, “Skeletal param- eter estimation from optical motion capture data,” in Com- puter Vision and Pattern Recognition, 2005. CVPR 2005.
IEEE Computer Society Conference on, 2005, pp. 782-788.
[29] F. Wang, E. Stone, W. Dai, M. Skubic, and J. Keller, “Gait analysis and validation using voxel data,” in Engineering in Medicine and Biology Society, 2009. EMBC 2009. Annual International Conference of the IEEE, 2009, pp. 6127-6130.
[30] H. Je, J. Kim, and D. Kim, “Hand gesture recognition to understand musical conducting action,” in Robot and Human interactive Communication, 2007. RO-MAN 2007. The 16th IEEE International Symposium on, 2007, pp. 163-168.
[31] H. Bade and J. Koebke, “Arthrosis in the peritrapezial joints of the hand,” Surg Radiol Anat, vol. 18, pp. 209-14, 1996.
[32] Y. Allieu, M. Chammas, B. Lussiez, B. Toussaint, M. Beni- chou, and F. Canovas, “[Role of scapho-trapezo-trapezoidal arthrodesis in the treatment of Kienbock disease. 11 cases],”
Ann Chir Main Memb Super, vol. 10, pp. 22-9, 1991.
[33] H. Moritomo, E. P. Apergis, G. Herzberg, F. W. Werner, S. W.
Wolfe, and M. Garcia-Elias, “2007 IFSSH committee report of Wrist Biomechanics Committee: biomechanics of the so- called dart-throwing motion of the wrist,” The Journal of hand surgery, vol. 32, pp. 1447-1453, 2007.
[34] H. Seradge, W. Owens, and E. Seradge, “The effect of inter- carpal joint motion on wrist motion: are there key joints? An in vitro study,” Orthopedics, vol. 18, pp. 727-32, Aug 1995.
[35] S. V. Gehrmann, R. A. Kaufmann, and Z.-M. Li, “Wrist cir- cumduction reduced by finger constraints,” The Journal of hand surgery, vol. 33, pp. 1287-1292, 2008.