CopyrightⒸ2011 KSAE 1225-6382/2011/112-06 Transactions of KSAE, Vol. 19, No. 4, pp.38-46 (2011)
횡방향 가속도 및 요 속도를 이용한 차량의 롤 각 추정기 설계
이 종 국*1)․권 영 신1)․이 형 철2)
LIG Nex1 ISR연구센터 3팀1)․한양대학교 전기생체공학부2)
Using Lateral Acceleration and Yaw Rate, Sliding Observer Design for Roll Angle
Jongkuk Lee*1)․Youngshin Kwon1)․Hyeongcheol Lee2)
1)ISR R&D Center 3 Team, LIG Nex1, 102-18 Mabuk-dong, Gilheung-gu, Yongin-si, Gyeonggi 446-912, Korea
2)Department of Electrical and Instrumentation Biomedical Engineering, Hanyang University, Seoul 133-791, Korea (Received 31 May 2010 / Accepted 10 January 2011)
Abstract : This paper presents roll angle estimator which used Kalman filter. Recently, the uses of the ELSD (Electronic Limited Slip Differential) and TVD(Torque Vectoring Differential) for vehicle yaw control are studied in many researches. However the roll angle can be negative effect of ELSD and TVD control. Therefore the information of roll angle can be used for vehicle yaw control. Moreover it can be used for rollover prevent control. Recently, most of the vehicles use lateral acceleration and yaw rate sensor. In this paper, design of Kalman filter which used lateral acceleration and yaw rate information is developed. In this paper, in order to verify the estimator ability, the CarSim and Matlab/Simulink are used.
Key words : Continuous Kalman filter(시 연속 Kalman 필터), Roll angle estimator(롤 각 추정기), Model-based estimator(모델 기반 추정기), Compensation of model-uncertainty(모델 비확정성 보상), Vehicle roll model(차량 롤 모델)
Nomenclature1)
Caf : front wheel cornering stiffness (N/rad) Car : rear wheel cornering stiffness (N/rad) y : yaw angle (rad)
f : roll angle (rad) M : mass of vehicle (kg) Ms : sprung mass of vehicle (kg) Ixx : roll inertia (kgm2)
Izz : yaw inertia (kgm2)
Kroll : spring coefficient of roll (kgm2/s) Croll : damping coefficient of roll (kgm2/s2) v : lateral speed (m/s)
*Corresponding author, E-mail: [email protected]
u : longitudinal speed (m/s) a : length from C.G to front wheel b : length from C.G to rear wheel h : height of C.G
δf : front wheel steering angle
1. 서 론
최근 차량의 안정성 제어 시스템의 사용이 증가 되고 있다. 이러한 차량 안정성 제어 시스템은 브레 이크를 기반으로 한 시스템(ESP)과, 구동 토크를 기 반으로 한 시스템(ELSD, TVD)으로 구분할 수 있다.
브레이크를 기반으로 한 시스템은 차량의 동적 특 성을 나쁘게 하기 때문에 최근 전자식차동제한 장
횡방향 가속도 및 요 속도를 이용한 차량의 롤 각 추정기 설계
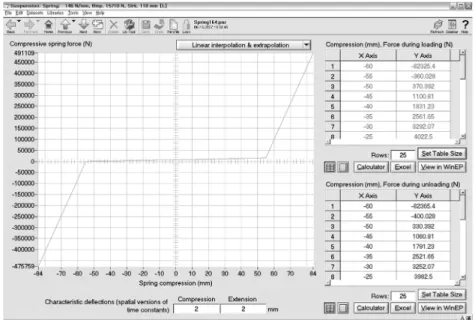
Fig. 1 Nonlinearlity of spring
치(ELSD), 토크벡터링장치(TVD) 등의 구동계를 이 용한 차량의 자세 제어에 대한 연구가 진행되고 있다.
일반적으로 차량이 회전할 때, 외륜이 내륜보다 속도가 빠르게 되는데, 전자식차동제한장치는 이를 이용해서 차량이 오버스티어 상황에서 제어함으로 써 차량의 안정성에 기여하는 장치이며, 토크벡터 링장치는 전자식차동제한장치에 기어가 추가되어 오버스티어 상황과 언더스티어 상황 모두에서 차량 의 안정성에 기여하는 장치이다. 하지만, 일반적인 고속 조향 조건에서는 롤이 방생하며, 외륜 쪽에 무 게 중심이 치우치게 되어, 기존의 전자식차동제한 장치의 개념과 다르게 외륜의 종방향 힘이 커지게 되어 오히려 오버스티어 경향을 만들 수도 있다. 이 에 구동계 제어를 통해 예측하지 못한 부정적 영향 을 최소화하기 위해 차량의 롤 각 추정기를 개발하 였으며, 차량의 전복사고 방지를 위해서도 활용이 가능할 것으로 판단한다.
현재 차량의 롤 각을 추정하는 방법은 횡 가속도 신호만 이용하는 방법, 롤 각속도를 직접 적분하는 방법, 현가장치의 변위를 측정하는 방법, 모델 기반 의 폐루프 추정기를 이용하는 방법 등이 존재한다.
이들 중 횡 가속도 신호만 이용하는 방법은 무게가 변하는 경우나 롤 각속도가 큰 경우에 큰 오차를 발
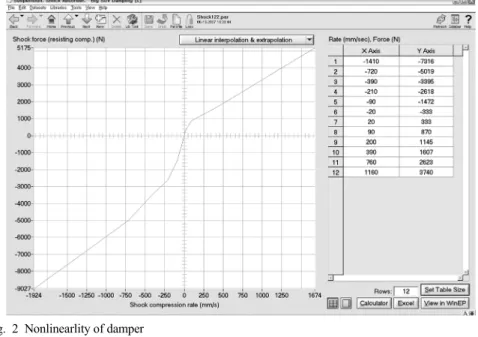
생하고, 롤 각속도를 적분하는 방법은 측정 신호에 편의(bias)가 존재하는 경우 추정치가 발산하며, 현 가장치의 변위를 측정하는 방법은 노면에 따라서 추 정된 롤 각의 위상이 반대가 되는 경우가 발생한다.4) 더욱이 상태 방정식에서 사용하는 스프링 및 댐 퍼의 계수는 Fig. 1과 Fig. 2와 같이 비선형성을 가진 다. 이에 따라 모델의 비확정성(model uncertainty)을 보상해 주지 않을 경우 실제 값과 추정 값은 많은 차 이를 만들게 되어, 최근 모델 기반의 폐루프 추정기 를 이용하는 많은 연구가 이루어지고 있다.
기존의 연구의 경우 확장 칼만 필터(Extended Kalman Filter)를 사용하였으며, 차량의 조향을 랜덤 노이즈(Random noise)로 추가하여 이를 바탕으로 실제값과 모델값의 차이를 바탕으로 외란과 센서노 이즈를 구하고 랜덤 노이즈가 없을 때를 바탕으로
를 구하거나, 언급이 없었으며, 빙판 등의 노면 조건에서의 분석이 이루어지지 않았다.
이 논문에서는 센서로 측정 가능한 요 속도(yaw rate)와 횡 방향 가속도의 출력을 이용하여 모델 기 반의 폐루프 추정기 설계를 위해 최소한의 튜닝 노 력으로 성능을 만족하는 시 연속 칼만 필터를 사용 하였으며, 노면조건과 조향조건에 따른 결과를 CarSim 프로그램을 이용하여 보여주었다.
Jongkuk Lee․Youngshin Kwon․Hyeongcheol Lee
Fig. 2 Nonlinearlity of damper
2. 차량 모델
차량의 모델을 위하여 이 논문에서는 2자유도 평 면 차량모델(bicycle model)과 스프링과 댐퍼로 이루 어진 롤 모델을 사용하였다.
2자유도 평면 차량모델을 운동 방정식으로 표현 하면 식 (1)1),3),5),6),8),9)
과 같다.
f f f
r y
zz f f zz
f r
zz
ar af
f f
f r
r f
M C u
M C a C b
u v M C u v a
I C v a u
I C a C b
u I
C b C a
M C
u u M
C a C v b
u M
C v C
δ ψ
ψ
δ ψ
ψ
δ
ψ
α α
α α α
α α
α α
α α
α α
⋅ +
⋅ ⋅
⋅
− + ⋅
⋅ ⋅
− +
= +
=
+ ⋅
⋅ ⋅
⋅
−
⋅ + ⋅
⋅ ⋅
⋅ +
− ⋅
=
⋅ +
⎥⋅
⎦
⎢ ⎤
⎣
⎡ −
⋅
⋅
− + ⋅
⋅ ⋅
− +
=
2 ) (
2
) C ( 2
2 ) (
2
) (
2 2
) (
2 ) (
2
r f
2 2
&
&
&&
&
&
(1) Fig. 4와 같이 스프링과 댐퍼의 롤에 대한 토크와 중력에 의해 발생하는 토크, 횡방향 가속에 의한 토
Fig. 3 Bicycle model
Fig. 4 Vehicle roll model
Using Lateral Acceleration and Yaw Rate, Sliding Observer Design for Roll Angle
크, 회전 각 가속도 성분의 토크가 평형을 이룬다는 점을 이용하여, 차량의 롤 모델을 운동 방정식으로 표현하면 식 (2)와 같다.
xx y s
xx roll xx
roll
I
h g
a M
I K I
C
⋅
⋅ + +
−
⋅
−
=
) sin
( φ
φ φ
φ&& &
(2)
이를 상태 방정식으로 표현하면 식 (3)과 같다.
[ ]
[ ]
⎥⎦
⎢ ⎤
⎣
=⎡
⎥⎦
⎢ ⎤
⎣
=⎡
⎥⎥
⎥⎥
⎦
⎤
⎢⎢
⎢⎢
⎣
⎡
=
⎥⎥
⎥⎥
⎦
⎤
⎢⎢
⎢⎢
⎣
⎡
=
=
=
=
= +
=
2 1 24
23 22 21
14 13 12 11
4 3 2 1
44 43 42 41
34 33 32 31
24 23 22 21
14 13 12 11
,
, ,
d D d c c c c
c c c C c
b b b b B a a a a
a a a a
a a a a
a a a a A U
a Y
v X
CX Y
BU AX X
f y
T
δ ψ
φ φ ψ
&
&
&
&
1 ,
0 ,
0 ,
0
, 0 ,
0
) (
, 2 ) (
2
0 ,
0
) (
, 2 ) (
2 ,
34 33
32 31
24 23
2 2
22 21
14 13
12 11
=
=
=
=
=
=
⋅
⋅ +
− ⋅
⋅ =
⋅
−
= ⋅
=
=
⋅ −
⋅
−
= ⋅
⋅
− +
=
a a
a a
a a
u I
C b C a a
u I
C a C a b
a a
u u M
f C a r C a b
u M
C a C
where
zz r f
zz f r
r f
α α
α α
α
α α α
xx roll xx
roll s
xx
f r s
xx
r f s
I a C I
K h g a M
u M I
C a C b h a M
u M I
C C h a M
−
− =
⋅
= ⋅
⋅
⋅
⋅
−
⋅
⋅
= ⋅
⋅
⋅ +
⋅
− ⋅
=
44 43
42 41
, ) (
2
) (
2
α α
α α
, 2 0
, 2 2
4 3
2 1
⋅
⋅
= ⋅
=
= ⋅
=
M I
C h b M
b
I C b a
M b C
xx f s zz
f f
α α α
0 2 ,
0 ,
0 ,
1 ,
0
0 ,
0
) (
2
) (
2
2 1
24 23
22 21
14 13
12 11
=
=
=
=
=
=
=
=
⋅
⋅
−
= ⋅
⋅
− +
=
M d d C
c c
c c
c c
u M
C a C c b
u M
C c C
f
f r
r f
α
α α
α α
(3)
이 때, 차량의 파라미터는 다음과 같다.
Table 1 Vehicle parameters
구분 단위 값
Front cornering stiffness Caf N/rad 92792 Rear cornering stiffness Car N/rad 71159
Sprung mass Ms kg 1592
Total mass m kg 1862
Length from mass center to front
wheel Lf m 1.180
Length from mass center to rear
wheel Lr m 1.770
Length from left wheel to right
wheel W m 1.188
Length from mass center to
grounds h m 0.719
Roll spring coefficient Kroll N/rad 159167 Roll damping coefficient Croll N sec/rad 30272
Roll inertia Ixx kg m2 614
Yaw inertia Izz kg m2 2488
3. 시 연속 칼만 필터 3.1 리카티(Riccati) 식 유도7,10)
만약, [A, L]이 가제어하고, [A, C]가 가관측한 Fig. 5의 시스템을 상태방정식(State equation)으로 나타내면 식 (4)와 같다.
x C y
y y H Bu x A x
Cx y
L Bu Ax x
ˆ ˆ
ˆ) ˆ (
ˆ
=
− + +
= +
=
+ +
=
&
&
θ ξ
(4)
그리고 외란(ξ)과 센서잡음(θ)에 대해 식 (5)가 성 립하고,
이종국․권영신․이형철
Fig. 5 Structure of kalman filter
) ( ] [
0 ] [
) ( ] [
0 ] [
τ δ Ξ ξξ ξ
τ δ Θ θθ θ
−
=
=
−
=
=
t E
E
t E
E
T T
(5) x~ 을 x−xˆ으로 정의한다면, 식 (6)이 성립하게 된다.
θ ξ
θ ξ
H L x HC A
H x C Cx H L x x A x x x
− +
−
=
−
−
− +
−
=
−
= ( )~
) ˆ ( )
ˆ (
~& & ˆ&
(6)
이 때, P를 E[~x~xT]라 정의한다면, 식 (7)이 성립 하게 된다.
T T T
T T T
T T
H x E x HE
L x E x LE T HC A P P HC A
x x x x E P
~ ] [
~ ] [
~ ] {
~ ] [ ) ( ) (
~ ]
~
~ [~
θ θ
ξ ξ
−
−
+ +
− +
−
=
+
= & &
&
(7) 이 때, 상태추정오차의 초기상태, 외란, 그리고 센 서잡음이 서로 비상관 되어 있다면, 식 (8)이 성립하 게 된다.
∴
(8)
같은 방법으로, 식 (9)이 성립된다.
(9)
식 (8)과 식 (9)를 식 (7)에 대입하면, 식 (10)이 된 다.
(10) 이 때, 가장 작은 을 얻기 위해서는, 식 (11)과 같이 을 선정하여야 한다.
(11)
이때 P&=0일 때의 해가 리카티 식이 된다.
3.2 파라미터 선정
이를 실제 시스템에 적용하기 위해서는 L, Ξ, Θ의 값이 필요하게 된다.
이때 Θ는 설계 파라미터이며, Ξ는 [A, M]이 안정 가능한 임의의 M을 선정하여 MMT로 정하는데, 플 랜트(Plant)[A, B]가 안정 가능하면, 일반적으로 M=B로 선정한다.
그리고 L을 선정하여야 하는데, 저주파에서 특이 값을 일치시키는 방법과 고주파에서 특이값을 일치 시키는 방법이 있다.2) 차량의 롤 각의 변화의 경우 노면의 조건에 따라 고주파 성분이 포함될 수 있으 나, 서스펜션과 타이어의 스프링과 댐퍼가 저주파 필터 역할을 수행하기 때문에 저주파 성분이 고주 파 성분에 비해 주요 성분이 된다. 이에 본 논문에서 는 저주파에서 일치시키는 방법을 다루고 있다.
식 (12)는 칼만 필터의 주파수 영역 등가식을 나 타낸다.
⇒
횡방향 가속도 및 요 속도를 이용한 차량의 롤 각 추정기 설계
Fig. 6 Vehicle model of CarSim
⇒
⇒
⇒
⇒
≅
(12)
이 때, 시스템 행렬 A-1가 존재한다고 가정하면, 저주파에서 식 (13)이 성립한다.
lim
→
lim
→
∴ ≅
(13)
저주파수 영역에서 모든 방향의 특이값을 일치시 키기 위해서는 식 (14)가 성립되어야 한다.
(14)
행렬 는 일반적으로 정방행렬이 아니므로 가 - 역행렬을 이용하여 설계 파라미터 L을 선정한 다.
(15)2)
본 논문에서 설계 파라미터 는 단위행렬로 설 정하였다.
(16)
4. 시뮬레이션(Simulation) 결과 설계한 롤 각 추정기를 검증하기 위해 카심 (CarSim)과 매틀랩/시뮬링크(Matlab/Simulink)를 사 용하였다. 차량의 모델은 ‘E-Class SUV’를 대상으로
Jongkuk Lee․Youngshin Kwon․Hyeongcheol Lee
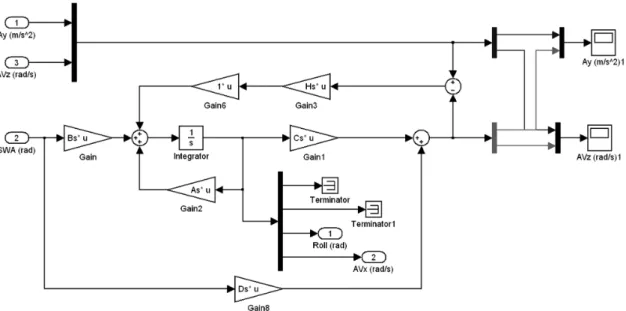
Fig. 7 Roll angle estimator
하였고, 차 속(50km/h, 80km/h)과 조향 조건(Double lane change, Step steer), 그리고 노면 조건(μ=0.3, 0.85)에 따른 상태방정식의 결과와 칼만 필터의 결 과를 비교하였다.
이 때, 이중차선변경은 Fig. 8과 같은 도로를 따라
Fig. 8 Condition of DLC
가게끔 조향조건을 갖추고 시뮬레이션을 수행하 였으며, 스텝조향은 5초에서 90도 조향(조향 기어 비=20.09)을 하도록 하여 시뮬레이션을 수행하였 다.
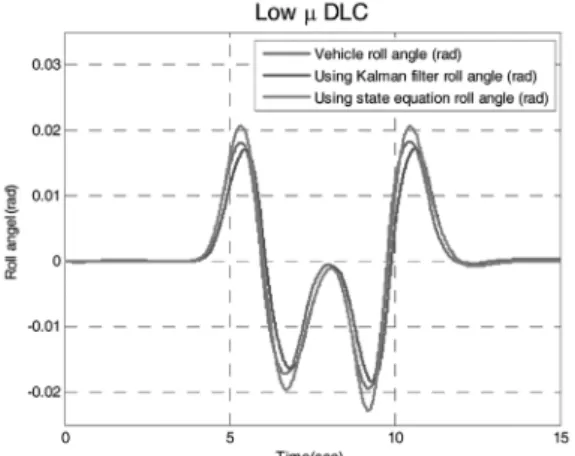
이 때, 시뮬레이션 결과에서 녹색 선이 카심 (CarSim)의 출력 값이며, 파란색 선이 칼만 필터를 이용하여 추정한 결과이며, 빨강색 선이 상태방정 식을 사용한 결과이다.
4.1 50km/h 이중차선변경(Double lane change)
Fig. 9 50km/h High μ DLC
Using Lateral Acceleration and Yaw Rate, Sliding Observer Design for Roll Angle
Fig. 10 50km/h Low μ DLC
Fig. 11 50km/h High μ Step steer
4.2 50km/h 스텝 조향(Step steer)
Fig. 12 50km/h Low μ Step steer
4.3 80km/h 이중차선변경(Double lane change)
Fig. 13 80km/h High μ DLC
4.4 80km/h 스텝 조향(Step steer)
Fig. 14 80km/h High μ Step steer
Fig. 15 80km/h Low μ Step steer
이종국․권영신․이형철
4.5 시뮬레이션 결과 분석
저속에서 노면의 마찰계수가 큰 경우에는 상태 방정식에 의한 결과와 실제 값이 차이가 별로 없으 나, 차량의 속도가 빠르고, 노면의 마찰계수가 낮을 수록 차이가 커지는 것을 확인할 수 있다.
하지만, 칼만 필터를 이용하여 설계한 경우에는 카심(CarSim)의 결과 값과 거의 차이가 없는 것을 확인할 수 있다.
이를 통해 시 연속 칼만 필터가 설계한 목적과 같 이 동작하는 것을 확인할 수 있다.
5. 결 론
1) 본 논문에서는 차량의 롤 각 추정을 위하여 시 연 속 칼만 필터를 설계하였으며, 다양한 시뮬레이 션을 통해서 시 연속 칼만 필터의 성능을 검증하 였다.
Table 2 Steady state error
구분 에러 (%)
속도 비고 (Km/h)
노면 마찰계수
롤 각 추정기
상태 방정식
50 0.85 2.115 13.595
50 0.3 0.478 79.904
80 0.85 1.680 50.420
80 0.3 1.087 386.413
정상상태 오차를 바탕으로 고속의 저 마찰계수 의 노면에서는 385.326%까지 에러를 줄일 수 있 음을 통해 설계한 롤 각 추정기의 성능을 확인할 수 있다.
2) 본 논문은 노면 경사각(road bank angle)이 존재 하지 않는 조건에서 시뮬레이션을 수행하였으 며, 추후 노면 경사각을 포함한 상태 방정식을 수 립하여, 추가 연구가 수행되어야 할 것으로 판단 한다.
References
1) R. Chung, J. Yoon and K. Yi, “Design of Estimator for Vehicle Roll Angle,” Fall Conference Proceedings, KSME, p.3, 2005.
2) J. S. Kim, Linear Contral System Engineering, pp.471-472, Cheongmoongak, Seoul, 1988.
3) B. Schofield, Vehicle Dynamics Control for Rollover Preventation, M. S. Thesis, Lund University, Sweden, 2006.
4) A. Hac, T. Brown and J. Martens, “Detection of Vehicle Rollover,” SAE 2004-01-1757, 2004.
5) P. J. Schubert, D. Nicholls, E. J. Wallner, H.
Kong and J. K. Schiffmann, “Electronics and Algorithms for Rollover Sensing,” SAE 2004- 01-0343, 2004.
6) T. J. Wielenga, “A Method for Reducing On-road Rollovers-anti-rollover Braking,” SAE 1999-01-0123, 1999.
7) J. B. Burl, Linear Optimal Control, Addison Wesley, California, 1998.
8) L. Imsland, H. F. Grip, T. A. Johansen, T. I.
Fossen, J. C. Kalkkuhl and A. Suissa,
“Nonlinear Observer for Vehicle Velocity with Friction and Road Bank Angle Adaptation - Validation and Comparison with an Extended Kalman Filter,” SAE 2007-01-0808, 2007.
9) M. Satria and M. C. Best, “Camparison Bet- ween Kalman Filter and Robust Filter for Vehicle Handling Dynamics State Estimation,”
SAE 2002-01-1185, 2002.
10) M. Ramsbottom and H. Baker, “Kalman Fil- tering for Monitoring and Control Driveline in Applications,” SAE 2003-01-1280, 2003.