HMM에 의한 원형 마이크로폰 어레이 적용 드론 위치 추적
Drone Location Tracking with Circular Microphone Array by HMM
정 형 찬
1· 임 원 호
1· 곽 준 봉
2· 이시티아크 아메드
2· 장 경 희
2*1인하대학교 항공산업시스템공학과
2인하대학교 전자공학과
HyoungChan Jeong
1· WonHo Lim
1·Junfeng Guo
2·
Isitiaq Ahmad2· KyungHi Chang
2*1Department of Aviation Industry and System Engineering, Inha University, Incheon, 22212, Korea
2Department of Electronic Engineering, Inha University, Incheon, 22212, Korea
[요 약]
불법 무인기에 의한 위협을 줄이기 위해, 음향 기반 기법에 의한 추적시스템을 구현하였다. 드론 음향 추적 방식에는 3가지 주 요 사항이 있다. 첫째, 가변 빔 형성을 통해 공간을 스캔하여 음원을 찾아 마이크 어레이를 사용하여 소리를 녹음한다. 둘째, 음원 의 존재 유·무 여부를 알기 위해 은닉 마르코프 모델(HMM)로 분류한다. 마지막으로 음원이 드론인 경우, 적응형 빔 패턴을 기반 의 추적기준 신호로 기록 및 저장된 음원을 사용한다. 시뮬레이션은 배경 노이즈 및 간섭 사운드가 없는 이상적인 상태와 배경 노 이즈 및 간섭 사운드가 있는 비이상적인 조건 모두에서 수행되며 불법적인 드론의 추적 성능을 평가하였다. 드론 추적 시스템은 마이크 어레이 성능에 따른 탐색 거리 성능향상 및 음향 패턴 일치 정도에 따른 드론 유무 판정 기준을 설계하여 음성판독 회로설 계에 반영하였다.
[Abstract]
In order to reduce the threat by illegal unmanned aerial vehicles, a tracking system based on sound was implemented. There are three main points to the drone acoustic tracking method. First, it scans the space through variable beam formation to find a sound source and records the sound using a microphone array. Second, it classifies it into a hidden Markov model (HMM) to find out whether the sound source exists or not, and finally, the sound source is In the case of a drone, a sound source recorded and stored as a tracking reference signal based on an adaptive beam pattern is used. The simulation was performed in both the ideal condition without background noise and interference sound and the non-ideal condition with background noise and interference sound, and evaluated the tracking performance of illegal drones. The drone tracking system designed the criteria for determining the presence or absence of a drone according to the improvement of the search distance performance according to the microphone array performance and the degree of sound pattern matching, and reflected in the design of the speech reading circuit.
Key word : Beamforming, Scanning, Classification, Tracking, Drone , HMM.
https://doi.org/10.12673/jant.2020.24.5.393
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-CommercialLicense(http://creativecommons .org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received 28 September 2020; Revised 6 October 2020 Accepted (Publication) 29 October 2020 (30 October 2020)
*Corresponding Author; KyungHi Chang Tel: +82-32-860-8422
E-mail: [email protected]
Ⅰ. 서 론
최근 다양한 용도를 위해 무인 항공기의 개발이 주목 받고 있다[1]. 유익한 정보를 제공하는 무인 항공기 기술이 발전했 지만 사생활과 안전에 관한 심각한 우려가 제기되고[2], 화학 적·생물학적 또는 핵 공격을 수행할 수 있으며, 마약이나 불법 이민자를 국경 너머로 밀입국시키기 위해 사용되어지고 있다 [3].
무인 항공기(UAV; unhumanized aerial vehicle)시스템은 무 선 기술을 기반으로 UAV의 감지, 인식, 전파방해를 제공할 수 있다[4]. 잠재적인 공중 표적을 탐지, 추적, 판별하기 위한 음향 배열 마이크 어레이 기반 기술은 다양한 시나리오로 널 리 사용되고 있다[5]-[7].
원형 음향배열 마이크 어레이를 이용한 빔 포밍 방식은 서 로 다른 방향에서의 노이즈 환경소스를 식별한다[8]. 마이크 어레이 및 음향 빔 포밍을 사용하여 음원을 포착하며 소형 선 박 위치 추적에도 이용된다[9].
본 논문에서는 불법 드론을 포착하기 위한 음향 신호 기반 모니터링 및 추적시스템 설계 및 구현을 목적으로 한다. 이 시스템은 드론 프로펠러 소리 검출을 위한 마이크 어레이를 장착하여 항공기 및 무인기 여부를 검출하는 유효한 수단으 로 사용한다.
검색 및 분류를 위한 첫 번째 단계는 음향 신호의 성분식별 을 위한 음성특징추출[10]이다. 고조파 회선 결합(harmonic line association)[2],[11], 웨이브렛 변환[12], 멜-척도 셉스트럴 계수(MFCC; mel-frequency cepstral coefficient)[13]. 방법과 같 은 음향 데이터에 기반한 특징 추출 기법이 있다. 두 번째 단 계는 SVM(support vector machine)[14], gaussian혼합모델[15], HMM(hidden markov mode)[16]과 같은 수학적 모델들을 분류 하는 것이다. 이 방법들은 음향 분류, 추출, 기록을 기반으로 한 음성인식과 같이 적용되는 일반적으로 사용되는 매개 변 수 분류기법이다.
드론의 도착 방향(DOA; direction of arrival) 추정 과정은 빔 스캔 알고리즘과 부분 공간 알고리즘으로 구성된다[17]. 빔 스캔 알고리즘은 빔을 형성하고 적절한 영역을 스캔하여 출 력의 크기 제곱을 표기한다. 최소분산 무왜곡응답[18], Root MVDR(minimum variance distortionless response)[19]이 그 예 이다. 부분 공간 알고리즘은 신호 서브 세트와 잡음 서브스페 이스 사이의 직교성을 이용하는 알고리즘 세트이다[17]. 따 라서 music, root-music, capon, esprut[20]는 배열 안테나를 사 용하여 신호의 도래 방향을 추정하는 데 가장 효율적이다.
무인기의 DOA를 추정하기 위하여 MMSE(minimum mean-square error)[22] 기준에 근거한 재귀 최소 제곱 알고리 즘[21]을 사용한다. RLS(Recursive least squares)알고리즘은 일종의 비 블라인드 적응형 알고리즘이며 대상 위치를 찾기 위해 참조 신호[23]가 필요하다. 제안된 프레임 워크는 세 가 지 주요 단계를 기반으로 한다.
첫째, 등간격 원형 마이크 어레이(UCA; uniform circular microphone arrays)를 사용하여 공간을 스캔하고 음원탐색 빔 패턴을 형성한다. 둘째, HMM을 사용하여 탐지음원을 불법 무인기 또는 다른 비행체를 인지 분류하기 위해 분류를 시작 한다. 마지막으로 불법 무인기인 경우 36개의 UCA의 탐지음 원 입력 마이크로폰 소자 배열인 ME(microphone elements)로 소리를 녹음하고 이 녹음 된 사운드를 RLS 빔 형성 기반으로 하는 추적을 위한 참조 신호로 사용한다.
그림 1은 불법 드론 탐지를 위한 시스템 구조를 보여준다.
36ME가 균일하게 분포되는 음향 신호를 이용한 불법 드론 식 별을 위한 아키텍처 각도는 36ME를 3분할 한
사 이이며 와 원형 배열의 반경은 약 0.18m...
이다.
은 배열의 차 요소에 의해 수신되는 신호 샘플이며, 여기서
은 시간 지수이다. 의 샘플링 속도는 데이터 획 득 프로세스에 의해 44 KHz이다. 물체의 도착방향(DOA)는 공간상에서 방위각과 고도각으로 계산되며, X-Y 평면의 방위 각은
로 표현되며, Z축에 대한 고도 각
로 표시된다.첫째, SBF(switched beam forming)를 사용해 공중 물체를 스 캐닝한다. 스캔은 SBF에 의해 고도 각 와 방위각
에서 수행된다. 둘째, SBF는 불법 드론뿐만 아니라, 그림 1의 새소리를 포함한 간섭 신호 등 여러 표적들을 공중 에서 스캐닝 한다.
기존 배열은 균일한 간격을 가진 선형 배열이므로, 링 패턴 의 원형 마이크 어레이를 사용한다. 2차원 배열인 만큼 선형 성과는 대조적으로 방위차원의 전체
를 제공한다.이 개념은 선형 배열의 단점을 제거할 수 있으며, 각도의 모호성을 제공하지 않을 수 있으며, 보다 대칭적인 빔 패턴을 생성하며 비행 물체를 획득하기 위해 더 많은 방향 빔을 생성 할 수 있다. 비행체의 방사 음원 때문에 더 정확한 분류데이 터를 얻을 수 있으며 UCA를 제공할 수 있다.
그림 1. 불법 드론의 음향 신호를 기반 위치추적 시스템 아키텍처 (a) 지상 관제 에 의한 데이터 수집(마이크), (b) 무단 무인 항공기 탐지를 위한 지상 제어국
Fig. 1. System architecture of acoustic signal-based positioning of illegal drones (a) Data collection by ground-based monitoring entities(micro phones), (b) Ground control station for illegal drone detection
Ⅱ. 드론 음향신호 결정을 위한 시스템 아키텍처
2-1 원형 마이크 어레이의 위상 구조 및 신호모델순환 패턴을 가지는 원형 마이크 어레이를 이용하며, 음원 소스의 정확한 위치를 모르는 경우에도 방위각에 걸쳐 균일 한 해상도를 가지는 성능을 제공한다[24]. 음향 빔 형성을 위 한 UCA는 보통 6~36의 ME(microphone elements) 를 사용한 다.
본 논문에서는 32개의 ME의 구성으로 실험조건을 배치하 였으며, 실험 시나리오에서 그림 2는 32개의 ME가 원형에 균 일하게 배치된 원형 마이크 어레이 구조이며, 원형 대칭 방위 각으로 불변하는 빔 패턴을 가지고 있다. ME는 센서 및 주변 회로를 구성한다.
각 센서는 다량의 제어신호와 데이터를 획득하는 하드웨 어를 필요로 하며 anti-aliasing, 필터링 및 신호샘플링 등의 기 능을 수행한다. 고도각과 방위각
은 ME에 영향을 미치 는 신호소스를 고려하여 배열 계수를 표시한다.각 ME는 복잡한 가중치를 적용하여 가중치를 부여한다.
ME의 숫자는 반경을 가진 UCA주위에 동등하게 간격을 두고 있기 때문에, ME의 방위각 및 ME간의 위상은 다음과 같으 며, M을 일정한 간격으로 배치한 UCA 어레이 계수는 다음과 같이 주어진다.
여기서 는 m차ME에서 충돌 신호의 진폭이며, 따라서
는 ME의 복수가중치로 표현된다. 공간상에서 메 인 빔을 ()로 비스듬히 향하게 하려면 m차 위상가중치는 다음과 같이 선택되어진다.
sin (1)
sin (2)
(3)
sin
(4)
Ⅲ. 드론 위치 결정을 위한 음향 신호기반 기법
SBF가 자유공간상 음원을 추적하고 음향분류를 위한 HMM을 사용하여 음원 사운드를 인식하며, 음향 인식기반에 서 객체를 스캔한다.
불법 무인 비행체인 경우 ME가 소리를 녹음하고, 저장된 사운드를 적응 재귀적 최소 제곱(RLS; recursive least square) 에 적용하여 추적을 위한 참조 신호로 사용한다. 재귀 최소
제곱 빔 형성 SBF에서의 스캐닝은 최대출력전력 및 앙각은
∼이며 방위각은 ∼ 이다. SBF가 스캐닝을 하면 시 스템은 음원의 존재를 감지한다.
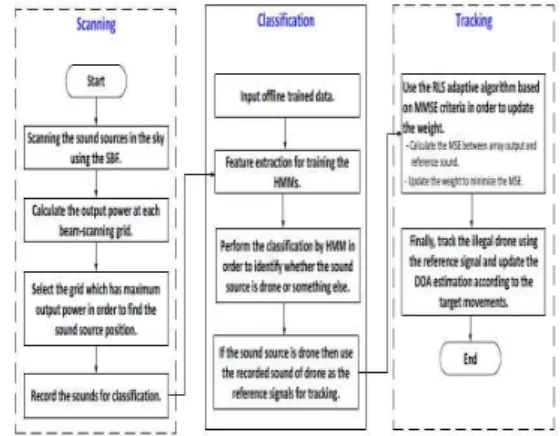
올바른 음원을 인식하기 위해 HMM 기술이 사용되며, HMM 분류기가 불법 무인기를 식별하면 RLS는 비 블라인드 빔 형성이기 때문에 적응형 빔 형성을 위한 기준 신호가 필요 하다. 탐지 목표물의 이동에 따라 그림 3은 제안된 음향 신호 의 전체 절차를 보여준다. 분류 및 태깅 절차에 대한 세부 사 항에서 RLS는 블라인드가 아닌 빔 형성이기 때문이다.
따라서 스캐닝 및 분류 과정 또한 다른 간섭 사운드 신호가 존재하더라도 기준 신호 획득은 사용 가능하다면 DOA추정 에 대한 참조 신호 및 업데이트를 사용하여 목표를 추적할 수 있다.
그림 2. 불법 드론의 음향기반 위치 추적 개요도
Fig. 2. Overall procedure of acoustic signal-based positioning of illegal drones.
그림 3. SBF에 의한 음원 추적 성능 및 음원 분해도
Fig. 3. Scanning resolution and the route of sound sources scanning by the SBF.
3-1 자유공간의 물체 스캐닝
1) 최대 전력 기준에 따라 switched 빔 포밍
음원의 위치는 최대 출력에 따라 표현된다. SBF 추적성능 및 음원 분해도에서 해당 그리드에 주사하는 빔의 방향을 바 꾸기 위하여 ME에 가중치 벡터가 주어진다. 따라서 각 그리 드에서 최대값을 찾기 위한 출력 전력이 계산되어진다.
각 스캐닝 영역의 출력 전력을 비교하기 위해 전 구간 영역 을 반복 스캔한다. 그리드는 3차원 공간에서 음원의 위치를 나타내고, 최대 출력을 표시한다. 즉, 빔의 피크(최대치)는 물 체의 방향과 일치하며 빔 형성기의 출력신호는 다음과 같이 주어진다.
가중치 벡터
번째 스냅샷에서의 번째 요소출력(5)
스캔된 각 영역의 출력은 다음과 같이 계산된다.
가중치 벡터 복소공액
기대치
번째 스냅샷에서의 신호 공분산 행렬(6)
∙
(7)따라서 수식(6)에 따라 빔 형성기의 출력을 계산하여 초기 에 목표 위치를 식별하는 최대 전력을 찾는다.
2) SBF(switched beam forming)에 의한 스캐닝 정확도 SBF에 의한 스캐닝 정확도는 SBF에 의해 0-90°의 앙각 및 0-360°의 방위각에서 수행된다. 시뮬레이션은 배경 노이즈 및 간섭 사운드 없는 이상적인 조건과 배경잡음 및 간섭이 존 재하는 자연조건하에서 수행되었다.
그림 3은 0-elevation angle과 0-azimuth angle 에서 시작하는 빔 스캐닝 경로를 보여준다. 빔 스캐닝은 고도각과 방위각을 각각 5°와 15°의 해상도로 증가시켜 경로를 따라 간다.
그림 4. 출력 전력의 컬러 맵 [무인항공기 1의 방향 (45°, 200°), 무인 항공기 2의 방향 (20°, 60°)]
Fig. 4. Color map of output power [Direction of drone1 (45°, 200°), Direction of drone 2 (20°, 60°)]
그림 5. 출력 전력의 컬러 맵 [무인기의 방향 (45°, 200°), 새의 방향 2 (60°, 50°)]
Fig. 5. Color map of output power [Direction of drone (45°, 200°), Direction of bird 2 (60°, 50°)]
화살표는 3차원 공간에서 음원을 스캔하여 경로의 각 그리 드에서 출력 전력을 계산하기 위해 빔의 이동 방향을 나타낸 다. 마지막으로 각 그리드의 출력 파워를 비교하고 최대 출력 파워를 가진 그리드를 선택하여 사운드 소스의 존재 여부를 판단한다. 단일 음원표적을 고려하고 빔 스캐닝 경로를 따라 출력 전력을 계산한다.
본 논문에서는 UCA의 반경을 0.18 m로 하고 빔 스캐닝 성 능을 충분히 제공하는 ME의 수를 확인한다. 따라서 반경 0.18 m아래의 32개 ME를 선택하여 자유공간 음원을 스캔한 다. 반경 0.18 m이하의 32개 ME의 선택을 확인하기 위해 ME 의 각 0.18 m, 0.2 m, 0.22 m 등의 원형 배열의 반경 차이와 평 균전력 비율(PAPR; peak to Average power ratio)을 확인한다.
PAPR은 식(8)에서 PAPR의 최대값은 임계값 이상으로 정의되 며, 비행 물체의 방향을 나타낸다.
(8)
ME의 수를 늘리거나 UCA의 반경을 줄임으로써 PAPR이 증가한다는 것이 분명하다. 그림 5에서 보여주는 (0.18 m, 0.2 m, 0.22 m, 0.25 m)의 원형 배열의 반경차는 8에서 20사이의 ME의 유사한 PAPR 성능을 제공한다. 20에서 32까지의 ME 의 원형 배열의 반경(0.18 m, 0.2 m, 0.22 m, 0.25 m)은 PAPR에 중요한 영향을 미친다.
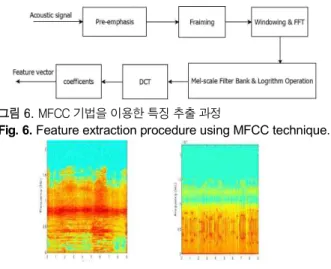
그림 6. MFCC 기법을 이용한 특징 추출 과정
Fig. 6. Feature extraction procedure using MFCC technique.
그림 7. 무인 항공기 및 조류 소리의 스펙트로그램 Fig. 7. Spectrogram of drone and bird sounds.
0.18 m 어레이가 최상의 PAPR성능을 보여준다. 또한, 32 보다 큰 ME를 증가시킬 때 PAPR은 다시 동일하게 된다는 것 을 명확하게 관찰했으므로 UCA의 경우 ME수를 32로 선택한 다.
빔의 정확성을 검사하기 위해 스캐닝을 위한 두 대상의 환 경을 고려해야 한다. 그림 7에서 스캐닝 결과는 황색 부분이 표적과 간섭 물체의 위치를 식별하는 것을 보여준다. 스캐닝 결과의 정확도는 여러 대상의 환경에서도 매우 만족스러우며 방해 오차는 3°미만이며 이는 허용 가능수치로 평가된다.
3-2 음원 식별을 위한 HMM 분류기
본 절에서는 HMM에 기반한 MFCC기법과 분류기법을 이 용하여 음원특징 추출과 드론 음성 인식의 분류, 단시간 셉스 트럴의 포락선을 활용하여 도메인 특징 추출을 위해 36개의 MFCC 기법이 적용된다. HMM에 기반한 분류 기준은 트레이 닝 데이터 세트에 따라 추출된 특징을 모델의 관측치로 사용 하여 트레이닝 데이터로 저장된다. 또한, 드론이 소리 인식을 수행하고 음원을 분류한다.
실험 결과는 최종적으로 제안된 방법의 타당성과 유효성 을 검증하며, 알고리즘 및 절차가 비교적 높은 인식률을 제공 한다.
1) 무인 항공기의 특징 추출
MFCC는 일반적인 음성신호 추출법으로 셉스트럴 도메인 형상을 추출할 수 있고, 대수학적 영역 스펙트럼의 포락선을 추출하는 수학적 기법이다. 국소 푸리에 변환(STFT;
short-time fourier transform)을 사용하여 프레임을 포함한 윈도 우 설정 및 FFT(fast fourier transform)를 사용하여 주파수 영역 을 시간 영역 신호로 변환한다. MFCC 절차의 세부사항은 그 림 6에 설명되어 있다. 그림 7은 드론과 새소리의 스펙트로그
램이며, STFT후의 출력 신호는 다음과 같다.
≤ ≤
≤ ≤
(9)
여기서
은 음향 데이터,
는 전체 프레임수, 프 레임길이 N을 포함하는
차 프레임에서 사용되는 창 함수 (window function)이다.
는 주파수 영역에서 윈도우 되어진 신호이다. 본 논문에서는 hamming window를 적용하 고, N-point window함수는 다음과 같이 주어진다. cos
≤ ≤
(10)
멜-척도 필터 뱅크는 다음과 같이 멜-척도에 주파수를 포함 하여 활용된다.
ln
(11)
필터 뱅크의
필터를 구현하는 방정식은 다음과 같이 표현된다.
≤ ≤
≤ ≤
≤ ≤
(12)
멜척도 주파수
주파수대역에서의 필터총갯수필터 뱅크를 통과한 각 프레임의 음향 데이터 시퀀스와 각 필터에 대한 모든 가중된 스펙트럼 값이 추가되고, 필터 당 하 나의 단일 값이 달성되며, 모든 계수형식의 멜-스펙트럼(13) 을 이용하여 멜-스펙트럼의 대수를 취한다.
ln
≤ ≤
(13)
여기서 N은 의 FFT길이로 주어진다. 그러므로 이산 코사인 변환(DCT; discrete cosine transform))은 다음과 같이
셉스트럴 스펙트럼 계수를 얻으며 수행되어진다.
cos
(14) 여기서 N은 셉스트럴 계수의 총수이다. 우선적으로 처음 12개의 계수로 MFCC를 작성하고 유지한다. MFCC 특성 벡 터의 단일 델타 계수는 동적 특징을 나타내기 위해 추가될 수 있다. 일반적으로 식(15)는 MFCC의 델타 계수를 계산하는데 사용된다.
≤
(15)
위 사항은 다음과 같은 추가 델타 계수를 제안한다.
≤
(16)
여기서, δ는 계수의 차이를 계산하는 단계이다. 따라서 특 징 추출을 위한 2개의 MFCC 즉, 24개의 MFCC와 표준 MFCC 및 델타 MFCC를 포함한 36개의 MFCC로 제안되어졌다. 최 적화 과정은 실시간 인식 전에 수행된다.
2) HMM을 이용한 무인 항공기(드론) 소리 인식
HMM기반 무인 항공기의 음성 인식의 중요 요소는 다차 원 HMM을 사용하여 정의된 사운드 클러스터이다. HMM은 독립적인 특징 벡터를 추출한 후 초기화시킨 후 음성인식을 위한 최적화된 트레이닝 특징 벡터를 사용한다. 최종적으로 viterbi 디코딩 알고리즘을 사용하여 최대로 판별 가능하게 인식된 클러스터를 찾는다.
HMM은 파라메트릭 랜덤 프로세스로 특징지어질 수 있는 정렬된 변수의 통계적 모델이며, HMM 입력은 관찰 가능량 이지만, 상태는 은폐된다. 관측 벡터의 순서는 다음과 같이 표현된다.
≤ ≤
상태 시퀸스 (17)일반적으로 HMM 모델은 다음과 같이 주어진다.
숨겨진 상태
상태관련 별도 관측수
상태전이행렬
상태배출확률 초기상태확률
(18)
HMM 모델 압축표기법은 다음과 같이 표현된다.
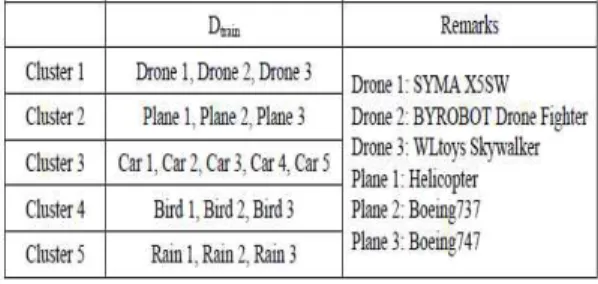
(19)3) Classifier 최적화를 위한 Tranning 및 테스트 음향모델의 매개변수는 트레이닝 데이터에 의해 결정되 고, 모델에 대한 입력 데이터는 트레이닝 데이터의 추출된 특 징이다. 트레이닝 모델은 가장 가능성이 높은 사운드 ID를 나 타내며 새로운 수신 음향 데이터를 평가하는데 사용된다. 트 레이닝 데이터 세트가 몇 개의 클러스터로 묘사되며, 개별 특 정 유형의 사운드를 나타낸다. 표 1은 각 클러스터의 트레이 닝 데이터를 보여준다.
HMM기반 무인 항공기 사운드 인식 방법의 실험 절차는 드론, 비행기, 자동차, 조류 및 비를 트레이닝 데이터 세트로 사용하며 무인 항공기, 비행기, 자동차, 조류 및 비를 각각 표 1에 설명되어 있다.
클러스터 1에서 클러스터 5까지의 사운드는 다음과 같다.
무인 항공기, 비행기, 조류 및 비 클러스터를 위한 3가지 종류 의 소리가 있지만, 자동차 클러스터의 경우 5가지 종류의 소 리에 대한 짧은 지속 시간으로 인해 각 클러스터에 대해 동일 한 사운드 데이터 길이를 유지하기 위해 수집된다.
λ는 관찰데이터
Ο
로 일반적으로 주어진다.Ο
는 각 클러 스터의 학습 데이터로부터 추출된 특징 벡터이다.음원 분류 최적화에 대한 training 문제는 BWA(baum welch algorithm)에 의해 보강된다. training 단계에서 5개의 HMM
가 혼합된 분류기로 training 되어지며, 반면에 테스트 단계 는 잘 알려진 viterbi 알고리즘 수행 모델로 주어진 시퀀스의 확률을 최대화하는 상태 시퀀스를 찾는다.인식 프로세스의 목표는 시퀀스로 표현되는 입력 사운드 를 검색하며, 특징 벡터 테스트
Ο
, 이 과정은 시퀀스가 주어질 때 가장 높은 확률로 HMM을 찾는 것이다. arg max∈
(20)선택되어진 분석 모델은 최대 확률을 부여하는 데이터가 속하는 모델, 즉 테스트 데이터가 포함 된 데이터를 분류한다.
표 1. HMM 기반 무인 항공기 소리 인식 절차
Table 1. HMM-based drone sound recognition procedure.
4) 실험 및 성능 평가
36개의 MFCC를 포함하는 데이터 샘플은 training data 세트 내의 각 클러스터를 사용하여 드론 사운드 인식률을 조사한 다. clssifier(분류기)에 계수되어지고, 로 표현되어지는 데 이터 샘플은 성공적으로 인식되어진 입력 데이터 샘플 의 총 개수는 다음과 같이 확률 ×로 계산된다.
음성 검출 확률은 다음과 같이 정의된다.
(21)
trraining 데이터 집합의 적합성에 대한 영향은 각 클러스트 당 변화하는 음성신호 종류들의 개수에 의해 실험되어진다.
음성신호의 간섭영향을 줄이기 위해 소리 신호의 전력을 정 규화한다. 정규화된 출력은 다음과 같이 설명된다.
(22)식(22)의 X(n)는 신호이고, N은 표본(sampling) 추출 개수 정규화 전의 진폭 스펙트럼을 나타낸다. 따라서 정규화 계수 (NF)는 다음과 같이 주어진다. 는 간섭음 전력(비 행기, 자동차, 새, 비)과 드론 사운드 의 간섭 전력을 나 타낸다.
(23)
그림 9는 정규화 후의 진폭 스펙트럼을 나타낸다. 따라서 드론 사운드를 포함한 모든 사운드는 정규화 후에 동일 전력 진폭을 가진다.
표 2는 36 MFCC방식에 의한 검출 확률의 결과를 나타낸 다. 잡음과 간섭음이 없는 이상적인 상태 조건에서 무인 항공 기의 탐지 확률은 최대 100%에 이를 수 있지만 실제 환경에서 의 노이즈와 간섭은 피할 수 없으므로 다양한 간섭신호들을 결합하여 배경 소음을 생성한다. 실제 환경에서 각 사운드의 파워를 고려한 에너지 비율은 다음과 같이 주어진다.
표 2. 잡음 없는 음성 인식을 위한 실험 결과
Table 2. Experimental results for noise-free speech recognition.
Test Dataset Drone Plane Car Bird Rain
Detection Probability
100%
Cluster 1 80%
Cluster 2 100%
Cluster 3 100%
Cluster 4 100%
Cluster 5
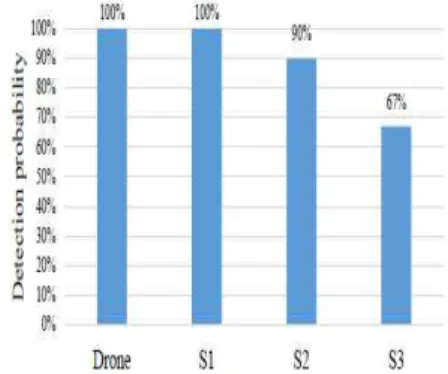
그림 8. SNR 값을 이용한 소리 인식 실험 결과
Fig. 8. Experimental result for sounds recognition by SNR.
그림 9. 정규화 후의 진폭 스펙트럼 ⒜드론, ⒝ 비행기, ⒞ 자동차,
⒟ 새, ⒠ 비
Fig. 9. Amplitude spectrum after normalization (a) drone, (b) plane, (c) car, (d) bird, (e) rain
×
×
×
×
×
×
×
×
(24)
여기서 는 비행기 소리, 는 자동차 소리, 는 새 소리,
는 비 소리로 백그라운드 노이즈가 각 각의 간섭음으로 구 성되어 있다는 것을 의미하며, 자동차의 경우는 0.1, 조류의 경우 0.1, 비의 경우는 0.3이다. 새와 비의 음성신호 전력의 크 기는 일반적으로 항공기와 자동차보다 적다. 다양한 간섭음 을 수반하는 시험 데이터 세트 S1, S2, S3는 다음과 같이 표현 된다. 각각 -3.3 dB, 2.8 dB 및 16.8 dB의 SNR을 나타낸다.
×
×
×
(25)
그림 8은 검출 확률 대 간섭 전력 비율을 보여준다. 간섭 전력비가 0.1과 0.5이면 무인기의 음향의 탐지 확률은 각각 100%와 90%로 표현된다. 파워 콤비네이션 비율이 1일 때, 단
독으로 측정되어진 드론 사운드의 검출 확률은 67%에 이르 며, 간섭 소리가 적으면 비행항로상에서 취득 탐지 확률 성능 이 더 좋아진다.
3-3 적응형 빔 형성을 이용한 불법 무인항공기 추적
1) 최적가중치(Criteria for Optimal Weights)
무인 항공기 위치는 시간에 따라 변경되므로 가중치 벡터 를 반드시 주기적으로 업데이트해야 하며, 가중치 벡터를 추 정하는데 사용되어진 데이터는 잡음의 영향을 받았기 때문에 다음 가중치 벡터를 찾기 위해 현재 가중치 벡터를 적합하게 활용하여야 한다.
적응형 빔 포밍 기술의 기본 규칙은 주어진 최적 출력 상태 에서 어레이 가중치를 실시간으로 조정하는 특정 기준을 기 반으로 한다. 적응형 빔 포밍 알고리즘은 참조 신호가 필요한 Non-Blind 알고리즘과 참조 신호가 불필요한 Blind 알고리즘 인 2개의 부분으로 분할될 수 있다.
드론 추적은 비 블라인드 알고리즘 기반 적응형 빔 포밍을 사용한다. 실시간으로 업데이트되는 다수의 적응형 알고리 즘과 MMSE와 MSIR, 최소 공분산 및 다양한 최소 평균 제곱 알고리즘, 직접 샘플 공분산 역행렬과 RLS에 대한 최적 가중 치 적용기준이 있다. RLS가 더 나은 수렴 속도를 제공한다는 것을 잘 알려져 있으며, MMSE에 기초한 RLS 적응형 알고리 즘을 사용한다[22],[23]. 드론 추정목표 신호 가 알려져 있다면, 빔 형성기 출력 및 목표 신호의 오차를 최소화하여야 한다.
그러므로 알려진 타겟 신호 요소는 빔 포밍을 필요로 한다.
그러나 타겟 시그널의 많은 응용 특성상 충분한 발진 신호
로 상세히 알려져야 한다. 타겟 신호와 어느 정도 상관 관계가 있으며, 이 신호를 기준 신호로 설정한다. 가중치는 빔 형성기 출력과 기준 신호간의 평균 제곱 오차(MSE)를 최 소화한다.
(26)여기서 r은 and 일반적으로 공분산 행렬이라고 부른다. 또한 MSE는 W에 대한 이전의 방정식의 기울기 벡터를 제로에 동일하게 설정하여 준다.
그림 10. 적응 형 빔 형성 Fig. 10. Adaptive beam forming.
∇
(27) 위너-호프 방정식 또는 위너 최적 솔루션[25].
2) 가중치를 갱신하는 RLS 알고리즘
RLS 알고리즘은 상관 행렬과 상관 벡터가 재귀적으로 계산되며, 상관 행렬 및 상관 벡터는 다음과 같이 주어진다.
(28)
(29)
망각 벡터 먼 과거의 데이터가 유실되지 않도록 하기 위한 것이다. 프로세서가 관찰 가능한 데이터의 통계적 변화를 따르게 하며, 실제로 λ는 일반적으로 0.98과 1사이에 있다. 에 해당하는 항을 고려하면 재귀가 있으며,
and 두 항을 모두 업데이트한다.
(30) (31)
Woodbury의 정체성을 사용하여 재귀 방정식을 얻는다.
공분산 행렬 :
(32)
여기에서 이득 벡터 은 다음과 같다.
(33)
최소 자승 추정치를 갱신하기 위한 재귀 방정식
은 으로 표현
×
(34)
다음과 같이 가중치 벡터를 업데이트하면
(35)그림11은 적응형 빔 형성의 구조이며, 여기서 은 개별 입력 신호의 출력 신호를 나타낸다. 각 각의 ME와는
요소의 가중치이다. 기준 신호 획득은 스캐닝 및 분류 프로세스에 기초한다. 따라서 기준 신호는 불법적인 무인 항공기를 추적하기 위한 적응형 빔 형성에 사용된다.
3) 불법 드론의 도착 방향에 대한 추적 결과
불법 무인 항공기의 DOA를 추정하면서 적응형 빔 형성에서 참조 신호를 사용하며, 시뮬레이션은 불법 드론 추적 수행에 이상적인 조건변수의 영향을 평가하기 위하여 MSE를 사용한다. 탐지오류는 실제경로와 예상경로의 차이를 나타내며 고도 오차, 방위각오류 및 평균 제곱 오류를 MSE는 다음과 같이 계산한다.
여기서 는 실제 고도, 는 추정 고도, 는 실제 방위각, 는 추정 방위각이 된다. 방위각 추적은 그림 13과 같이 다른 위치에서 19회 진행된다.
(36)
(37)
(38)
표 3은 이상적인 환경을 기반의 추적 결과를 설명한다.
실제 고도와 방위각은 무인 항공기의 실제 방향을 나타내며 예상 고도와 추정 방위각은 시뮬레이션 기반추정 결과를 나타낸다. 탐지 추정 방위각은 시뮬레이션을 기반으로 추정된 결과를 설명한다.
무인 항공기의 위치 추적은 0고도각과 0방위각에서 시작하여 최대 90도 각 및 360도 방위각에 도달한다. 추정 경로는 무인 항공기의 실제 경로와 거의 중첩되어있다.
이는 RLS 알고리즘이 이상적인 환경에서 추정 경로의 높은 정확성으로 인해 불법 무인기를 추적하는데 더 적합하다는 것을 보장하나, 추적 결과에는 여전히 오류가 존재할 수 있으며, 이는 신호 스펙트럼 내용 및 계산 오류와 같은 여러 요소에 기인한다.
실제 소음 환경에서 추적 절차의 견고성을 확인하기 위해 AWGN(additive white gaussian noise)시나리오를 고려한다.
그림 12는 MSE 대 SNR의 성능을 보여준다. RLS 알고리즘은 다양한 SNR 값에서 대부분 정확한 DOA 추정치를 생성하며, SNR 값을 증가시키면, MSE가 줄어들어 추적 성능이 향상된다는 것을 알 수 있다.
2 ㏈의 SNR에서 MSE가 0.01 rad인 경우 이상적인 경우의 추적 성능과 거의 유사하다. 또한, MSE 0.05 rad는 노이즈 노출환경에서도 추적시스템의 성능이 여전히 충분하기 때문에 수용 가능하며 유사 간섭원의 영향을 고려하기 위해 존재하는 타겟과 간섭원을 고려하며, 간섭 신호가 목표
신호를 추적하면서 추적 시스템 성능에 미치는 영향을 분석한다. 간섭 사운드 신호는 목표 사운드 신호에 근접 할 때 트래킹 시스템 성능을 저하시킨다.
Ⅳ. 드론음향탐지 시스템 설계 및 시험
4-1 드론음향탐지기 시스템 설계 규격드론은 로터 회전에 의한 추력에 의하여 비행하므로 로터 회전에 따른 음파가 발생한다.
HMM을 사용하여 이 음파에서 프레임 단위로 음성 특징 벡터들을 추출하여 HMM 파라미터를 사용하여 viterbi 검색 을 수행하여 입력된 특징 벡터들이 출현할 수 있는 가장 높은 확률의 상태 열을 구함으로써 그 음성 신호의 내용에 해당하 는 음성 인식 장치 및 음성 저장, 호출, 비교, 표출 프로그램 구 현을 목표로 하였다.
표 3. 이상적인 환경에서의 추적 결과
Table 3. Tracking results in an ideal environment Ddesired Signal Snapshots Nr.of Array Elements Radius
Drone Sounds 1,000 32 0.18m
그림 11. MSE VS SNR Fig. 11. MSE vs SNR
그림 12. 간섭하는 음성 신호의 추적 정확도 (a) 간섭 음향 신호의 방향 (18°, 63°), (b) 간섭 음향 신호의 방향 (78°, 12) Fig. 12. Tracking accracy with interfering sound signals (a)
Direction of interfering sound signal (18°, 63°), (b) Direction of interfering sound signal (78°, 125°)
그림 13. 드론 음향 처리 탐지 시스템 구성도
Fig. 13. Drone detection system configuration diagram.
그림 14. 드론 음향탐지기 블록도
Fig. 14. Drone detection system block diagram.
4-2 드론 음향탐지 시스템 H/W 설계
드론 음향탐지기 시스템 구성 블록은 마이크 어레이를 통 하여 입력된 음원 음향 신호를 오디오 증폭하고 잡음 제거를 위한 저역 여파기를 통과하여, 아날로그 디지털 변환기(ADC;
analog to digital converter)에 인가한다.
ADC 에서 생성된 데이터는 디지털 시그널 프로세서(DSP;
digital signal processing)에 입력되고 이 데이터는 DSP 에서 주 파수, 신호강도 등의 특징을 추출한 특징적 데이터(MFCC;
mel-frequency cepstral coefficient)로 변환되도록 설계하였다.
4-3 드론 음향탐지기 회로구성도
그림 15. 드론 음향탐지기 H/W 블록도 Fig. 15. Hardware block diagram.
드론 추적시스템은 디스플레이부, 오디오입력 마이크 처 리부, RS-232C/USB 외부 인터페이스부, 전원부, ADC부, CPU&MEMORY부, DSP부로 구성하였으며, STM32F722xx Arm ® Cortex ® -M7 32 비트 RISC 코어를 채택하여 FIRM WARE 설계에 응용처리 하였다.
구현시스템은 마이크 어레이를 연결하고 음향감지를 시작 하면 기능키에 의한 동작을 LCD 표시창에 드론 탐지인식률 및 드론 식별 및 방위가 표시되게 하였다.
그림 16. CPU&MEMORY 부 회로도 Fig. 16. CPU&MEMORY circuit diagram.
그림 17. DSP 부 회로도 Fig.17. DSP circuit diagram.
그림 18. 드론 음향탐지기 메인보드
Fig.18. Drone Detection System Main-Board.
그림 19. MIC 입력보드 (a)마이크 입력 보, (b) 2채널 연결 테스트 Fig. 19. MIC INPUT BOARD a) MIC INPUT BOARD, (b) 2 CH
connecting Test.
4-4 드론 음향탐지기 F/W 및 S/W 설계
드론 추적 알고리즘은 트레이닝 패스와 테스트 패스 흐름 을 기초로 프로그래밍 하였고, 트레이닝 패스는 상용 드론 프 로펠러 신호와 각종 신호 파라미터들을 마이크로프로세서의 메모리에 저장하였다.
트레이닝 패스에서 불러온 데이터를 테스트 패스로 입력 하여 두 가지 파라미터와의 일치 정도를 판별하여 드론 식별 을 한다. Training 데이터 처리는 Baum-Welch 알고리즘 (BWA)에 의해 보강되며, Training 단계에서 다수의 HMM이 혼합된 분류기로 Training 되어진다. 테스트 단계는 잘 알려 진 viterbi 알고리즘 수행 모델로 주어진 시퀀스의 확률을 최 대화하는 상태 시퀀스를 찾는다.
1) 드론 음향탐지기 F/W 기능정의
그림 20. 드론 음향탐지 신호 추적 알고리즘 구성도
Fig. 20. Drone sound detection signal tracking algorithm configuration diagram.
그림 21. 트레이닝 패스 : HMM PARAMETER 추출 Fig. 21. Training pass : HMM PARAMETER extraction.
그림 22. 테스트패스 기능정의 Fig. 22. Test pass function definition.
표 4. MFCC / BAUM-WELCH 알고리즘 정의 Table 4. MFCC / BAUM-WELCH algorithm definition
BAUM-WELCH ALGORITHM PROCESS 1 MFCC PROCESSING
– MFCC PROCESS CHARPTER 2 MFCC DAT LOADING
3 EM(EXPECTATION–MAXIMIZATION) ALGORITHM 4 HMM-PARAMETER(PI,A,B) EXTRACTION 5 HMM PARAMETER STORE
6 VERTERBI TRANSFER PROBLEM AND SOLVING 1 ARITHMETIC OVERFLOW :
MEMORY DEPTH AND DOUBLE FLOAT 2 PROCESS SPEED OPTIMIZATION :
FUNCTIONAL REDEFINED 3 HMM PARAMETER UNEVEN :
MORE REPETITON
2) 드론 음향탐지기 S/W 설계 흐름도
그림 23. 소프트웨어 흐름도 Fig. 23. Software flow chart.
그림 24. 전체통합 소프트웨어 흐름도
Fig. 24. Total integrated software flow chart.
4-5 드론 음향탐지기 설계검증
드론 음향탐지기는 시험 전 가청주파수를 포함한 오디오 주파수 응답을 시험하였고, 음성 주파수에 대한 표출상태를 확인하였다. Audio signal generator 를 음원 소스로 하였고 오 실로스코프로 출력파형을 확인하였다. 테스트 주파수는 1 Khz, 2 Khz, 4 Khz, 8 Khz 로 하였으며, 음향탐지기에서 정확 하게 표출되었다.
시험 비행 전 상용 드론의 실제 비행 및 프로펠러 음향 녹 음 파일을 입력신호로 사용하여, 드론 음향탐지기 추적알고 리즘을 테스트하였다. 예측한 기대성능을 시험한 결과, 추적 도 57% 이상의 만족할만한 성능을 확인하였다.
그림 25. 드론 음향탐지기 시험 전 계측기 CALIBRATION Fig. 25. Measuring instrument calibration before the drone
detector test.
그림 26. 주파수별 드론 음향탐지기 출력 시험 (a) 1 Khz CAL, (b) 2 Khz CAL, (c) 4 Khz CAL, (d) 8 khz CAL
Fig. 26. Drone sound detector output test by frequency (a) 1 Khz CAL, (b) 2 Khz CAL, (c) 4 Khz CAL, (d) 8 khz CAL.
그림 27. 상용 드론 사운드 표출 테스트
Fig. 27. Commercial drone sound expression test.
4-6 드론 음향탐지기 시험
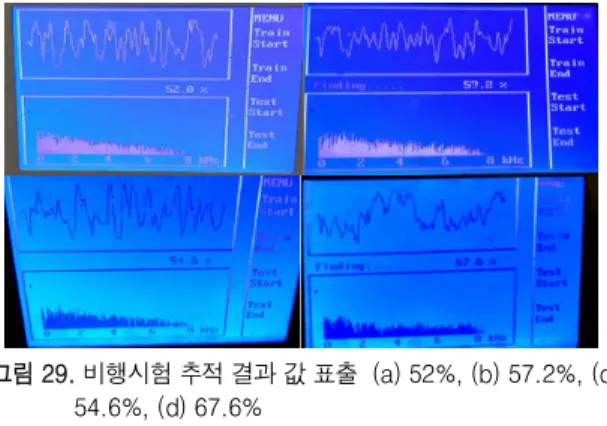
드론 음향탐지기 시스템 시험은 마이크 어레이를 연결 실 내 비행 테스트를 하였으며, 마이크 어레이의 상, 하, 좌, 우,정 면, 배면 테스트를 진행하였다.
소형 드론은 모터 추력이 작아, 음원의 진폭이 낮아 검출 확률이 다소 떨어졌으며, 상용 QUAD COPTER 보다는 HEXA COPTER 가 더 나은 추적 검출 확률을 보여주었다.
그림 28. 마이크 어레이 연결 드론 비행 음향 테스트
Fig. 28. Microphone array connection drone flight acoustic test.
그림 29. 비행시험 추적 결과 값 표출 (a) 52%, (b) 57.2%, (c) 54.6%, (d) 67.6%
Fig. 29. Display of flight test tracking results (a) 52%, (b) 57.2%, (c) 54.6%, (d) 67.6%.
Ⅴ. 결 론
본 논문에서는 불법 무인 항공기를 탐지하고 추적하기 위 한 모니터링 시스템을 설계 및 구현하였으며, 배경 잡음과 간 섭 사항을 고려하여 음원을 모니터링 및 추적하였다.
시뮬레이션 모드에서 스캐닝은 고도 각 0 ~ 90° 및 방위각 0~360°에서 SBF로 수행하였으며, 분류기는 HMM모델이 사 용되는 음성 인식 기술을 기반으로 하였다. 결과는 이상적인 환경에서 음향 신호의 검출 성능이 약 95%로 정확하다는 것 을 보여주었다. 적응형 빔 포밍 기술을 사용하여 분류기 획득 참조 신호에 의존하며, 조류 등 여러 AWGN 소음 및 간섭과 같은 실용적인 환경을 고려하여 추적을 위한 시뮬레이션을 수행하였다.
설계한 드론 음향탐지기는 시험 전 계측기 CALIBRATION 및 상용 드론들의 음원 사운드를 비교 분석하여, 탐지 및 추적 성능을 향상하였으며, 마이크 어레이의 성능 및 입력 AUDIO 진폭에 따라 결과 값 변동이 있었으며, 드론 프로펠러 음향 진 폭의 크기에 따라 출력 값이 안정되게 표출되었다. 드론 음향 의 검출 및 추적 성능은 50% 이상의 만족할만한 성능을 나타 내었다.
Acknowledgments
이 논문은 2019년도 정부(과학기술정보 통신부) 재원을 받아 한국연구재단의 지원으로 수행된 기초 연구사업임.
( 2019R1F1A1061696)
References
[1] G. Cai, J. Dias, and L. Seneviratne, “A survey of small-scale unmanned aerial vehicles: recent advances and
future development trends,” World Scientific Publishing Company, Unmanned Systems, Vol. 2, No. 2 March 20, 2014.
[2] Protecting the Sky White Paper, Vol. 2, Signal monitoring of radio controlled Civilian unmanned aerial vehicles and possible countermeasures, Rohde & Schwarz GmbH & Co.
KG, pp. 3-6, Oct. 2015.
[3] W. Shi, G. Arabadjis, B. Bishop, P. Hill, R.Plasse and J.
Yoder, Detecting, tracking, and identifying airborne threats with netted sensor fence, in Sensor Fusion Foundation and Application, London, England: IntechOpen ch. 8, pp.
140-153, 2011.
[4] I. Tchouchenkov, F. Segor, and T. Bierhoff, “Detesction, recognition and counter measures against unwanted UAVs,” in Proceeding 10th Future Security Research Conference, Berlin: Germany, pp. 15-17, 2015.
[5] A. Zelnio and B. Rigling, “Low-cost acoustic array for small UAV detection and tracking,” in Proceeding IEEE National Aerospace and Electronics, Dayton Ohio:OH USA, pp. 110-113, 2008.
[6] M. Peacock and M. Johnstone, “Towards detection and control of civilian unmanned aerial vehicles,” in Proceeding of 14 th Australian Information Warfare Conference, Perth: Australia, pp. 99-103, 2013.
[7] E. Tianaroig and F. Jacobsen, “Beamforming with a circular microphone array for localization of environmental noise sources,” The Journal of the Acoustical Society of America," Vol. 128, No. 6, pp. 3535–3542, 2011.
[8] C. Zhang, D. Florencio, and Z. Zhang, “Maximum likelihood sound source localization and beamforming for directional microphone arrays in distributed meetings,”
IEEE Transactions on Multimedia, Vol. 10, No. 3, pp. 538–
548, 2008.
[9] J. Gebbie, M. Siderius, and J. Giard, “Small boat localization using adaptive three-dimensional beamforming on a tetrahedral and vertical line array,” Journal of the Acoustical Society of America, Vol 19, No1, pp. 2-8 , 2013.
[10] X. Zhuang and X. Zhou, “Feature analysis and selection for acoustic event detection,” in Proceeding of IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas: NV , pp.17-20, 2008.
[11] E. William and M. Hoffman, “Classification of military ground vehicles using time domain harmonics' amplitudes,”
IEEE Transactions on Instrumentation and Measurement, Vol. 60, No.11, pp.3720-3731, 2011.
[12] A. Averbuch and A. Zheludev, “Wavelet-based acoustic detection of moving vehicles,” Journal of Multidimensional Systems and Signal Processing, Vol. 20, No. 1, pp. 55-80,
2009.
[13] E.Chaves, M. Travieso, and A. Camacho, “Katydids Acoustic Classification on Verification Approach based on MFCC and HMM,” in Proceeding of IEEE Conference on Intelligent Engineering Systems, Lisbon: Portugal, pp.
561-566, 2012.
[14] C. Lin and H. Chen, “Audio classification and categorization based on wavelets and support vector machine, IEEE Transactions on Speech and Audio Processing,” Vol. 13, No. 5, pp. 644-651, 2005.
[15] I. Sen, M. Saraclar, and P. Kahya, “A Comparison of SVM and GMM-Based Classifier Configurations for Diagnostic Classification of Pulmonary Sounds,” IEEE Transactions on Biomedical Engineering, Vol. 62, No. 7, pp. 1768-1776, 2015.
[16] A. Aljaafreh and L. Dong, “Ground vehicle classification based on hierarchical hidden markov model and gaussian mixture model using wireless sensor networks,” in Proceeding of IEEE International Conference on Electro/Information Technology, illinois: IL, pp. 1-4, 2010.
[17] H. L. Van Trees, Optimum Array Processing, 2nd ed.
New York, NY: Wiley, 2002.
H. L. Van, Tress Part IV of “Detection, estimation and modulation theory,1st ed. New York, NY : Wiley, 2002.
[18] F.Akbari, S. Moghaddam, and T. Vakili, “Music and MVDR DOA estimation algorithms with higher resolution and accuracy,” in Proceeding of International Symposium on Telecommunications, Tehran: Iran, pp.76-81, 2010.[19]
S. Chen, C. Meng, and A. Chang, “DOA and DOD
estimation based on double 1-D Root-MVDR estimators for bistatic MIMO radars,” Wireless Personal Communications, Vol. 86, No. 3, pp. 1321–1332, 2016.
[20] R.J. Weber and Y. Huang, “Analysis for capon and Music DOA estimation algorithms,” in Proceeding of IEEE Antennas and Propagation Society International Symposium. Charleston, South Carolina : SC, USA, pp. 1-4, 2009.
[21] D. N. Patel, B. J. Makwana, and P. B. Parmar,
“Comparative analysis of adaptive beamforming algorithm LMS, SMI and RLS for ULA smart antenna,” in Proceeding of 2016 International Conference on Communication and Signal Processing (ICCSP), Melmaruvathur: India, pp. 1029-1033, 2016.
[22] R. Islam, F. Hafriz, and M. Norfauzi, “Adaptive beam forming with 16 element linear array using MaxSIR and MMSE algorithms,” in Proceeding of IEEE International Conference on Telecommunications and Malaysia International Conference on Communications, Penang:
Malaysia, pp. 165-170, 2007.
[23] B. Pattan, Robust Modulation Methods & Smart Antennas in Wireless Communications, Electromagnetic Theory and Antennas Electromagnetic Theory and Antennas,1st ed. New Jersey, NJ: Prentice Halls, 2000.
[24] J. Litva and T.K. Lo, Digital Beamforming in Wireless Communications, Norwood, Massachusetts, MASS: United States. Artech House, Boston, pp. 13-27, 1996.
[25] S. Haykin, Adaptive Filter Theory, 4th ed. New Jersey, NJ: Prentice Halls, 2002.
정 형 찬
(
HyoungChan Jeong)1994년 2월: 동의대학교 전자통신공학과(공학사) 2004년 8월: 인천대학교 정보통신대학원(공학석사) 2013년~현재: 인하대학교 항공산업시스템공학과(박사과정) 1995년 1월~1999년 7월: 한국공항공사 제주지사 1999년 8월~현재: 인천국제공항공사 항행처 계기착륙팀
※ 관심분야: UAV,이동통신 음향공학, NAVI_AID_COMM
임 원 호(WonHo Lim)
1993년 2월: 숭실대학교 전자공학과(공학사) 2001년 8월: 숭실대학교 정보통신학과(공학석사) 2013년~현재: 인하대학교 항공산업시스템공학과(박사과정) 1982년∼2009년: 한국통신 안양지사
2012년∼현재: ㈜신화엔지니어링 상무
※ 관심분야: UAV,5G MC Systems, LTE-R, PS-LTE, CoMP
곽 준 봉 (Junfeng Guo)
2015년 6월: 중경우전대학교 정보통신공학과 (공학사) 2016년 9월∼2017년 8월: 인하대학교 교환학생(공학석사과정)
※ 관심분야: 3GPP LTE-A & 5G MC Systems, Small Cell
이시티아크 아메드(Isitiaq Ahmad)
2007년 7월: N.W.F.P UET, Peshawar,parkistan(공학사) 2014년 8월: 인하대학교 전자공학과(공학석사) 2015년~2019년: 인하대학교 전자공학과(박사 )
2009년~현재: assistant Professor, Institute of Engineering &
Technology,Gomal University Pakistan
※ 관심분야: 3GPP LTE-A & 5G MC Systems, Small Cells, Interference Management
장 경 희 (KyungHi Chang)
1985년2월: 연세대학교 전자공학과(공학사) 1987년2월: 연세대학교 전자공학과(공학석사) 1992년8월: Texas A&M Univ.,EE Dept.(Ph.D) 1989년∼1990년: 삼성종합기술원 주임연구원 1992년∼2003년: 한국전자통신연구원 이동통신연구소
무선전송방식연구팀장 2003년∼현재: 인하대학교 전자공학과 교수
※ 관심분야: 3GPP LTE-A & 5G Systems, HetNet, Public Safety & Mobile Ad-hoc Networks, Maritime/Underwater Communications

![그림 4. 출력 전력의 컬러 맵 [무인항공기 1의 방향 (45°, 200°), 무인 항공기 2의 방향 (20°, 60°)]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5185535.350106/4.892.510.703.314.420/그림-출력-전력의-컬러-무인항공기-방향-무인-항공기.webp)