Vol.12, No.3, pp.86-96 (2018) https://doi.org/10.20910/JASE.2018.12.3.86
고기동 안정화 카메라 및 원격제어 셀프카메라를 적용한 캔위성 시스템 개발
김수현1· 박재현1· 김혜인1· 배기성1· 채봉건2· 오현웅1,†
1조선대학교 항공우주공학과
2드림스페이스월드
Development of A CanSat System Applying High Agility Camera and Remote Control Camera
Su-Hyeon Kim1, Jae-Hyeon Park1, Hye-In Kim1, Gi-Sung Bea1, Bong-Geon Chae2 and Hyun-Ung Oh1,†
1Department of Aerospace Engineering, Chosun University
2Dream Space World Abstract
The High Agility and Remote Control Camera System Can-Satellite (HA+RC2S CanSat) proposed in this study is a satellite designed by the authors of this work and submitted as an entry in the 2017 CanSat competition in Goheung gun, Jeonnam, Korea. The primary mission of this work is to develop a high agility camera system (HACS) that can obtain high quality images in the air. This objective is achieved by using a tuned mass damper (TMD) to attenuate the residual vibration that occurs immediately after rotating the camera.
The secondary objective is to obtain a self-image of CanSat in the air using a remote control self-camera system (RCSS) that is wirelessly controlled using a joystick from a ground station. This paper describes the development process of the HA+RC2S CanSat, including mission definition, system design, manufacturing, function and performance tests carried out on the ground, and final launch test.
초 록
본 논문에서 제안한 캔위성은 2017년 캔위성 경연대회에 출전한 HA+RC2S CanSat (High Agility and Remote Control Camera System Can Satellite)이다. 주요임무는 수동진동감쇠기인 동흡진기를 사용하여 카 메라를 회전시킨 직후에 발생하는 잔류진동을 감쇠하여 고품질의 영상획득이 가능한 고기동 안정화 카 메라 시스템을 검증하는 것이다. 부가적으로는 지상국의 조이스틱을 사용하여 무선으로 제어되는 원격 제어 셀프카메라로 캔위성 자체의 이미지데이터를 획득하는 것이다. 본 논문에서는 임무 정의, 시스템 설계, 제작, 기능 및 성능시험, 최종 비행시험을 포함하는 HA+RC2S CanSat의 개발과정에 대해 서술하였 다.
Key Words : CanSat(캔위성), High Agility Camera System(고기동 안정화 카메라 시스템), Remote Control Self-camera System(원격제어 셀프카메라 시스템), Tuned Mass Damper(동흡진기)
Received: May. 16, 2018 Revised: June. 14, 2018 Accepted: June. 14, 2018
† Corresponding Author
Tel: +82-10-4709-2440, E-mail: [email protected]
Ⓒ The Society for Aerospace System Engineering
1. 서 론
초소형 위성으로 분류되는 캔위성은 1999년 미국 스탠포드 대학의 로버트 트윅 교수가 우주개발 분야의 인력양성 및 기술저변 확대 등 교육목적으로 제안한 음
료수 캔 크기의 모사위성이다. 캔위성은 구조, 전력, 통 신 및 데이터처리 등 실제 인공위성과 같은 시스템 구 성을 가지나 극초소형의 크기로 인해 개발기간이 짧고 저가에 개발이 가능하기에 임무실패에 대한 부담이 적 은 장점을 갖는다. 그리고 위성체를 모델로켓이나 헬륨 풍선 등을 이용하여 고도 수백미터 지점에서 낙하시킴 에 따라 수분 정도의 짧은 시간동안 임무를 수행하는 방식이다. 따라서 캔위성의 임무환경은 극한의 임무환경 조건을 갖는 일반위성에 비해 상대적으로 완화되어 있
어 발사진동시험 및 열진공시험과 같은 가혹한 우주환 경 모사조건에서의 환경시험 등이 없이 기능검증 및 시 험비행만으로도 충분히 운용이 가능하다 [1-2].
캔위성 프로그램은 피교육자가 설계, 제작, 시험, 발 사 및 운용에 이르는 실제 위성 개발 과정과 유사한 과 정으로 진행됨에 따라 교육효과가 뛰어난 장점을 갖는 다. 이에 따라 인공위성 시스템의 이해증진 및 과학기술 의 대중화를 목표로 초ㆍ중ㆍ고교생 및 대학생들이 참 여하여 우주 기술의 창의적 아이디어 확대 및 흥미도 증진에 기여하고 있다[3]. 현재 미국, 유럽, 일본 등의 우주 선진국에서는 매년 캔위성 경연대회를 개최하고 있다. 국내에서도 과학기술정보통신부와 인공위성연구소 를 주관으로 2012년부터 캔위성 경연대회가 개최되고 있다[4]. 캔위성 개발사례로 Lee at al.[5]이 개발한 캔 위성은 국제 캔위성 경진대회인 ARLISS (a rocket launch for international student satellites)에 출전하 여 공중에서 모델로켓과 분리 후 쿼드콥터 형태와 같이 로터를 전개시키고 자율적으로 비행하여 목표지점에 도 달하는 임무를 수행하였다. 국내 캔위성 경연대회에 참 가한 캔위성 중 Kim at al.[6]이 개발한 캔위성은 탑재 스마트폰의 터치스크린에 적용된 형상기억합금에 기반한 무선터치시스템을 이용하여 전화번호를 명령에 따라 스 스로 입력하고, 지상에 있는 스마트폰과의 영상통화를 연결하여 캔위성의 내/외부 영상을 전송하는 임무를 수 행하였다. 이와 함께 형상기억합금 스프링을 이용해 고 각방향으로 회전 가능한 광역스캔카메라의 광역 영상촬 영 임무를 수행하였다.
본 논문에서 제안한 캔위성은 2017년도 캔위성 경연 대회에 참가한 HA+RC2S 캔위성으로, 주요임무는 광역 촬영을 위해 카메라 회전 후 정지 시 유발되는 잔류진동 감쇠를 위해 수동형 진동감쇠기인 동흡진기 (TMD;
Tuned Mass Damper)가 적용된 고기동 안정화 카메라 시스템 (HACS; High Agility Camera System)을 검증 하는 것이다. 상기 HACS의 검증을 위해 TMD가 미적용 된 카메라를 탑재하여 TMD 적용 및 미적용된 각각의 카메라로부터 비행 중 획득된 영상품질을 비교분석한다.
부가적 임무로는 원격제어 셀프카메라 시스템 (RCSS;
Remote Control Camera System)을 지상에서 조이스 틱로 조종하여 카메라 각도에 따른 위성체 스스로의 영 상을 획득하게 된다. 본 논문에서는 HA+RC2S 캔위성의
임무 및 시스템 설계/제작, 지상 성능 검증시험 및 비행 시험결과에 대하여 서술하였다.
2. 본 론
2.1 임무 정의 및 시스템 개요 2.1.1 임무 소개
본 논문에서 소개하는 HA+RC2S 캔위성의 주요 임 무는 탑재 카메라의 고기동 촬영을 위한 HACS를 낙 하임무를 통해 검증하는 것이다. 상기 시스템은 실제 인공위성처럼 캔위성 자체가 자세를 변경하면서 영상 촬영을 실시할 경우, 공기저항 및 돌풍 등의 외란에 의 해 목표물에 대한 초점유지가 어려우며, 짧은 임무시간 동안 다수의 표적을 촬영하기 어려운 점에 주목하여 제안되었다. 상기의 한계점 극복을 위해 제안된 HACS 는 캔위성의 짧은 비행시간동안 다수의 표적을 촬영하 기 위해 카메라를 고각방향으로 고속 회전구동하게 된 다. 그러나 카메라의 회전 구동 후 멈출 때 발생하는 잔류진동이 카메라의 시선 각을 교란시킴에 따라 영상 품질이 저하되는 원인이 된다. 따라서 상기의 잔류진동 제어를 위해 탑재 카메라에 수동형 진동감쇠기인 TMD를 적용하였으며, 이는 HACS의 주요 특징이다.
본 캔위성 임무에서 HACS의 검증은 총 2개의 카메라 시스템을 탑재하여 TMD의 적용유무에 따라 획득된 영상 품질을 비교함으로서 이루어진다.
또한, 부가적 임무로는 무선으로 제어되는 RCSS를 사용하여 캔위성 자체의 이미지데이터를 획득하는 것이 다. 상기 시스템은 실제 지구관측위성인 센티넬-1A[7]
에 탑재된 카메라가 위성의 태양전지판을 직접 촬영하 여 위성의 상태를 점검하는 점을 주목하여 제안되었다.
따라서 RCSS는 지상에서의 조이스틱의 무선 명령에 따라 캔위성에 대한 카메라의 지향 각도를 조정하고 촬 영된 영상을 실시간으로 지상국에 전송한다.
2.1.2 운용개념
전술한 임무목적에 따라 수립된 HA+RC2S 캔위성의 운용개념은 Fig. 1과 같다. 모델로켓에 탑재된 캔위성 은 고도 500 m에서 로켓과 분리된 후 낙하산이 전개 되면서 임무가 시작된다. 이 때, 상태정보데이터인 GPS (global positioning system), IMU (initial
measurement unit), 조도 정보를 지상국으로 송신한 다. RCSS는 캔위성 촬영각 확보를 위한 전개형 붐이 발사 시 나일론선으로 구속되어 있다가 낙하임무가 시 작되면 지상국에서 자동으로 명령을 전송하여 열선이 작동되어 전개된다. 이후에는 지상국에서 조이스틱으로 RCSS의 촬영 각도를 제어하여 캔위성의 셀프 이미지 를 실시간으로 획득한다. 이와 동시에 HACS 검증을 위해 TMD 적용유무에 따른 각각의 카메라로부터 획 득된 영상을 SD카드에 저장하며, 위성 착지 후 회수하 여 수집된 데이터를 확인함으로서 임무가 종료된다.
Fig. 1 Operation Concept of HA+RCS CanSat
2.1.3 HA+RC2S CanSat 시스템 설계
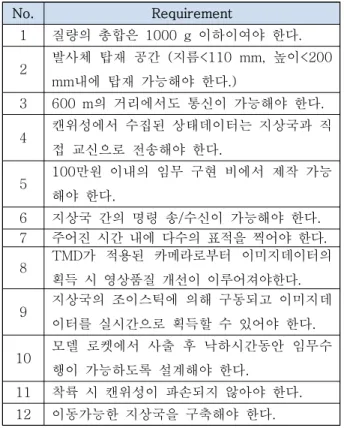
전술한 임무구현을 위해 개발된 HA+RC2S CanSat 의 요구조건은 Table 1과 같다. 캔위성은 사전 선정된 모델로켓 규격에 따라 중량 1 kg, 지름 110 mm, 높 이 200 mm 내에서 설계되어야 한다. 캔위성은 낙하임 무 시 예상되는 지상국과의 최대 거리인 600 m에서도 데이터 통신이 가능해야 하며, 캔위성에서 수집한 상태 데이터는 지상국으로 직접 전송되어야 한다. 또한 캔위 성에 적용된 HACS는 TMD가 적용된 카메라로부터 이 미지데이터 획득 시 TMD를 적용하지 않았을 시보다 영상품질의 개선이 이루어져야 한다. 그리고 캔위성의 임무수행을 위해 RCSS는 지상국의 조이스틱에 의해 구동되고 이미지데이터를 실시간으로 획득되어야 한다.
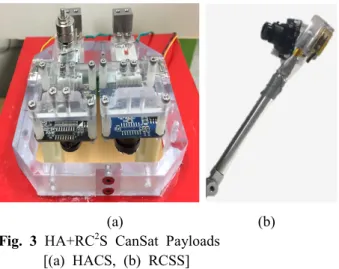
그리고 HACS 데이터는 SD Card에 저장된다. 상기의 요구조건에 따라 설계된 HA+RC2S 캔위성의 전체적 형 상은 Fig. 2와 같다. 캔위성의 임무구현을 위한 주요 임 무보드들은 위성체 내부에 배치된다. 탑재체인 HACS는 지상 촬영을 위해 위성체 하단에 배치되며, RCSS는 위성 체 내/외부 촬영을 위해 측면 외부에 Fig. 3 (b)과 같이
전개형 붐에 장착된다. 본 논문에서 제안한 캔위성의 제 원은 Table 2와 같으며 이에 상응하는 탑재체 및 서브 시스템의 설계내용을 2.2절, 2.3절에 각각 서술하였다.
Table 1 System Requirements of HA+RC2S CanSat
No. Requirement
1 질량의 총합은 1000 g 이하이여야 한다.
2 발사체 탑재 공간 (지름<110 mm, 높이<200 mm내에 탑재 가능해야 한다.)
3 600 m의 거리에서도 통신이 가능해야 한다.
4 캔위성에서 수집된 상태데이터는 지상국과 직 접 교신으로 전송해야 한다.
5 100만원 이내의 임무 구현 비에서 제작 가능 해야 한다.
6 지상국 간의 명령 송/수신이 가능해야 한다.
7 주어진 시간 내에 다수의 표적을 찍어야 한다.
8 TMD가 적용된 카메라로부터 이미지데이터의 획득 시 영상품질 개선이 이루어져야한다.
9 지상국의 조이스틱에 의해 구동되고 이미지데 이터를 실시간으로 획득할 수 있어야 한다.
10 모델 로켓에서 사출 후 낙하시간동안 임무수 행이 가능하도록 설계해야 한다.
11 착륙 시 캔위성이 파손되지 않아야 한다.
12 이동가능한 지상국을 구축해야 한다.
Fig. 2 System Configuration of HA+RC2S CanSat
(a) (b) Fig. 3 HA+RC2S CanSat Payloads
[(a) HACS, (b) RCSS]
Table 2 System Specification of HA+RC2S CanSat Items Specification
Payloads Refer to Section 2.2 Structure Dimension : 167.4 mm
Mass : 0.91 kg
Commu- nication
HACS
Model : Zigbee Pro Frequency : 2.4 GHz Range : 1 km
RCSS
Model : Bluetooth Frequency : 2.4 GHz Range : 800 m
Power Type : Li-ion Batteries (2 Cells, 7.4 V, 2200 mAh) C&DH MCU : ATmega 2560
Comm. I/F : UART, l2C
Ground Station
Model : Zigbee Pro USB Bluetooth 2.0+EDR Class 1 Frequency : 2.4 GHz Software : LabView
2.2 주요 탑재체
2.2.1 고기동 안정화 카메라 시스템 (HACS, High Agility Camera System)
Figure 4는 주요 탑재체 중 HACS에 대한 설계 형 상을 나타낸다. HACS는 두 개의 서보모터와 카메라 모듈, 스트레인게이지 및 카운터매스 (countermass)로 구성된다. 두 카메라 모듈은 각각 보 형태의 구조체에 장착되며, 보의 반대쪽은 서보모터의 회전축에 장착된
다. 따라서 모터 구동 시 카메라 모듈이 회전함에 따라 본래 위치에서 –90°~0°의 각도범위 내에서 고속구동 촬영이 가능하다. 이 때, 보의 무게중심이 한쪽으로 치 우치는 것을 방지하기 위해 카메라 모듈의 반대 편 끝 에 카메라 무게와 같은 카운터매스를 Fig. 4와 같이 장 착했다. 상기의 카메라 모듈 중 하나에는 TMD Mass 가 별도의 보 구조체를 통해 카메라 모듈의 끝단에 Fig. 4와 같이 적용됨에 따라 TMD가 미적용된 카메라 모듈과의 영상품질을 비교하게 된다. 이때 TMD Mass 와 보의 길이는 예비시험으로부터 선정되었으며 약 4g 의 영구자석과 길이 30 mm의 PC (poly-carbonate)를 사용하였다. 그리고 모터 구동에 따른 각 카메라 모듈 의 변위 응답을 비교하고자 보 구조체의 표면에는 스트 레인 게이지를 부착하였다.
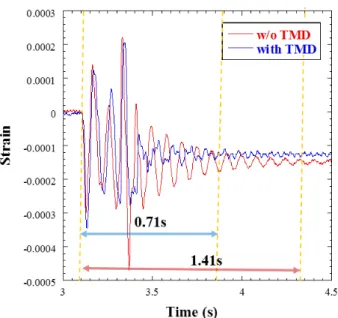
Figure 5는 상기 HACS의 설계 유효성 검증을 위해 지상시험에서 획득한 데이터로 기능시험 결과를 나타 낸다. 기능시험을 위해 전술한 두 카메라 모듈이 구동 하다가 동시에 정지하였을 때 전술한 스트레인게이지 로부터 측정된 TMD 유무에 따른 스트레인응답의 시 간이력을 함께 나타낸다. TMD 미적용 시 진동응답 감 쇠에 걸리는 시간이 1.41초인 것과 비교하여 TMD 적 용 시 0.71초로 약 2배 빠르게 안정화됨으로부터 적용 된 TMD가 목적하는 진동감쇠에 있어서 효과적임을 알 수 있다. 따라서 제안된 HACS가 모터 구동에 따른 잔류진동이 있더라도 더욱 안정적인 영상획득이 가능 할 것으로 판단된다.
Fig. 4 Configuration of the HACS
Fig. 5 Time Profile of Strain Response of Camera Module with and w/o TMD after Motor Driving
2.2.2 원격제어 셀프카메라 시스템 (RCSS, Remote Control Self-Camera System) Figure 6은 부 탑재체인 RCSS에 대한 설계형상을 나타낸다. RCSS는 스프링힌지, RCSS 붐, RCSS 모터, 카메라로 구성되어 있다. RCSS 카메라 모듈은 서보모 터의 회전축에 장착되며 RCSS 모터는 전개형 붐에 의 해 고정되어 있다. RCSS는 AVR 타이머를 이용한 PWM 제어를 통해 RCSS 모터가 1도씩 움직이며, 조 이스틱 작동에 따라 ±90°로 구동되도록 설정하였다.
Figure 7은 상기 RCSS의 설계유효성 검증을 위해 조이스틱의 무선제어에 따라 서보모터가 구동하여 RCSS 각도 변화에 따른 이미지데이터를 나타낸다.
RCSS의 전개형 붐은 촬영각 확보를 위해 전개되었을 때 60°로 설정하였으며 이때 HA+RC2S CanSat의 국부 적인 이미지데이터 확보가 가능하다.
2.3 서브시스템 설계 2.3.1 구조계
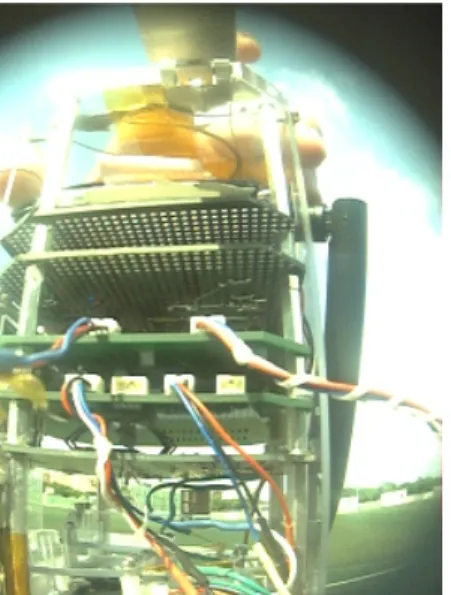
Figure 8은 HA+RC2S CanSat의 기계적 형상으로 맨 위 상부 PCB에는 배터리가 수납되어 있으며 아래 보드에는 순차적으로 EPS (electrical power system), OBC (on-board computer), 탑재체 보드가 배치되어 있다. 그 리고 캔위성의 IMU 센서는 EPS 보드 위에, GPS 모듈은
측면 패널에 각각 배치되어있다. HACS는 캔위성 하부 패 널에 RCSS는 하부 구조체에 스프링 힌지로 고정되어 측면 부에 배치된다. 제작된 캔위성은 Table 1에 도시된 바와 같이 지름 105 mm, 높이 185.4 mm로 발사로켓 내부공간 에 장착 될 수 있도록 발사체에서 요구하는 설계 요구조건 을 만족하였으며, 구조체 총 질량은 930 g으로 Table 3에 도시한 바와 같이 1 kg인 요구조건에 대해 70 g의 마진을 가짐을 알 수 있다.
Figure 9(a)는 본 캔위성의 발사 시 수납형상을 나타내 며, Fig. 9(b)는 사출 후 임무수행을 위한 전개형상이다.
발사 시 수납된 RCSS는 나일론선으로 구속되며 모델로켓 사출 후 열선으로 절단하여 전개되도록 설계하였다.
Fig. 6 Configuration of the RCSS
Fig. 7 Image of CanSat Obtained by the RCSS
Fig. 8 Mechanical Configuration of HA+RC2S CanSat
Table 3 System Mass Budget
Item Mass (g)
Structure 342
Payloads 124
Electrical 283
Parachute 181
Harness 10
Total 930
Requirement 1000
Margin (Requirement-Total) 70 (7%)
(a) (b)
Fig. 9 (a) Stowed and (b) Deployed Configurations of RCSS
2.3.2 전력계
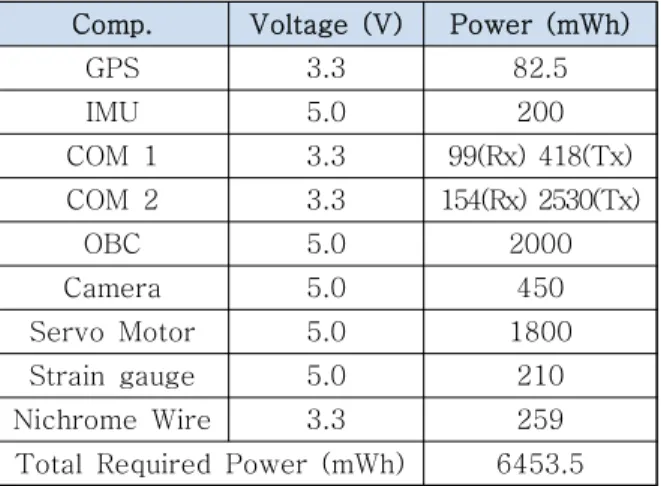
Table 4는 약 40분간 HA+RC2S CanSat이 구동될 때의 각 구성품별 소비전력을 나타내며 소비전력에 알 맞은 전력공급을 위해 3.3 V와 5 V 레귤레이터를 사 용하였다. 일반위성과 달리 캔위성은 지상에서부터 전 원을 킨 상태로 모델로켓에 탑재되어 사출 후 임무가
수행되므로 전력계는 위성의 임무성공여부와 직접적으로 연관되어 있기 때문에 매우 중요하다. 따라서 캔위성의 전력 요구사항을 만족하기 위해 DC 7.4 V, 2200 mAh의 리튬 이온 배터리를 사용하였으며, 형상과 제원은 Table 5에 나타내었다. 선정된 배터리를 토대로 전력버짓 산출 결과 25.5% 마진으로 전력계 요구조건을 충족하였음을 확인하였다.
Table 4 System Power Budget Comp. Voltage (V) Power (mWh)
GPS 3.3 82.5
IMU 5.0 200
COM 1 3.3 99(Rx) 418(Tx) COM 2 3.3 154(Rx) 2530(Tx)
OBC 5.0 2000
Camera 5.0 450
Servo Motor 5.0 1800 Strain gauge 5.0 210 Nichrome Wire 3.3 259 Total Required Power (mWh) 6453.5
Table 5 Specification of Electrical Power Subsystem H/W
Item Specification
Configuration
Type Li-ion
Dimension(mm) 36.5 × 65 × 20
Voltage 7.4 V
Capacity 2200 mA
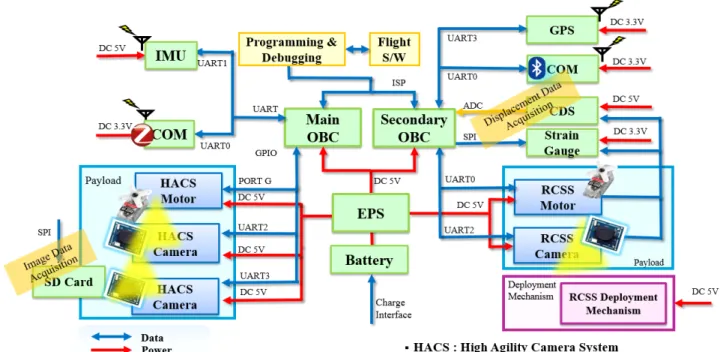
2.3.3 데이터 처리계
HA+RC2S CanSat의 데이터 처리계는 임무수행 명 령, 데이터 수집 및 저장된 데이터를 지상국으로 전송 하는 등 위성의 전반적인 시스템을 제어하기 위해 ATmel사의 ATmega2560을 사용하였으며, 형상과 제 원은 Table 6과 같다. 위성의 상태정보와 카메라 임무 를 동시에 제어하기 위해 두 개의 MCU (micro
Fig. 10 System Electrical Block Diagram controller unit)를 사용하여 부족한 UART 포트 수를
해결하였다. 이와 동시에 MCU에서 임무를 수행하기 위한 처리용량을 계산한 결과, Main OBC에서는 64.7%, Secondary OBC에서는 48.4%로 각각의 탑재 체 임무에 따라 OBC를 분류하여 데이터 처리를 수행 하였다. Fig. 10은 상기 캔위성의 전기적 구성을 나타 내며, EPS에서 전력이 공급됨과 동시에 운용되어 위성 의 상태정보 및 임무데이터 송신과 RCSS 구속분리 및 메커니즘 제어가 가능하도록 구성되어 있다.
2.3.4 통신계
지상국으로부터 임무수행에 필요한 명령신호를 송/수신 하는 역할을 수행하는 통신계는 2.4GHz 대역의 지그비와 블루투스 통신을 사용하였으며, Chipsen 사의 Probee-ZE10S와 Parani-ESD110V2 하드웨어로 선정하 였다. 대용량 데이터 처리가 가능한 블루투스에는 이미지 수신 및 GPS 데이터 등 원할한 데이터 송수신이 가능하 도록 구축하였으며, 지그비는 IMU데이터 및 HACS 임무 를 구동하여 SD Card에 저장되도록 구축하였다. 이에 대 한 통신계 형상 및 제원은 Table 7에 나타내었다.
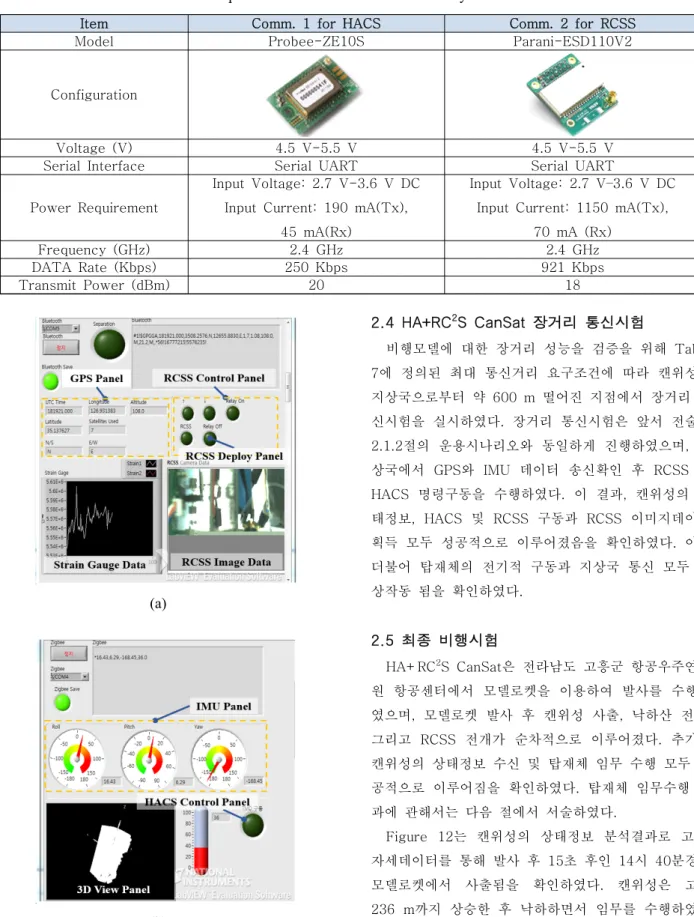
2.3.5 지상국
Figure 11과 같이 지상국은 상용소프트웨어인 Labview[8]
를 이용하여 구축하였으며, 원활한 데이터처리를 위하 여 블루투스와 지그비 패널 각각을 구축하였다. Fig.
11(a)에 도시된 블루투스 패널에는 캔위성 사출확인을 위한 조도센서, GPS데이터, 스트레인게이지, 릴레이스 위치 구동 패널, RCSS 카메라데이터 및 모터 구동 명 령 창으로 구성되어 있으며, Fig. 11(b)에 도시된 지그 비 패널에는 IMU 데이터, 자세확인을 위한 3D View, 고기동 안정화 카메라 시스템 구동 명령을 위한 버튼 으로 구성되어 있다.
Table 6 Specification of OBC H/W Item Specification
Configuration
Model ATmega2560
Voltage (V) 4.5 V-5.5 V Operating Speed 20 MHz-16 MHz
Type
Low-Power 8bit AVR RlSC-based Micro
Controller Internal Comm. UART, SPl
Item Comm. 1 for HACS Comm. 2 for RCSS
Model Probee-ZE10S Parani-ESD110V2
Configuration
Voltage (V) 4.5 V-5.5 V 4.5 V-5.5 V
Serial Interface Serial UART Serial UART
Power Requirement
Input Voltage: 2.7 V-3.6 V DC Input Current: 190 mA(Tx),
45 mA(Rx)
Input Voltage: 2.7 V–3.6 V DC Input Current: 1150 mA(Tx),
70 mA (Rx)
Frequency (GHz) 2.4 GHz 2.4 GHz
DATA Rate (Kbps) 250 Kbps 921 Kbps
Transmit Power (dBm) 20 18
Table 7 Specification of Communication Subsystem H/Ws
(a)
(b)
Fig. 11 Configuration of Ground Station [(a) Bluetooth Panel, (b) Zigbee Panel]
2.4 HA+RC2S CanSat 장거리 통신시험
비행모델에 대한 장거리 성능을 검증을 위해 Table 7에 정의된 최대 통신거리 요구조건에 따라 캔위성이 지상국으로부터 약 600 m 떨어진 지점에서 장거리 통 신시험을 실시하였다. 장거리 통신시험은 앞서 전술한 2.1.2절의 운용시나리오와 동일하게 진행하였으며, 지 상국에서 GPS와 IMU 데이터 송신확인 후 RCSS 및 HACS 명령구동을 수행하였다. 이 결과, 캔위성의 상 태정보, HACS 및 RCSS 구동과 RCSS 이미지데이터 획득 모두 성공적으로 이루어졌음을 확인하였다. 이와 더불어 탑재체의 전기적 구동과 지상국 통신 모두 정 상작동 됨을 확인하였다.
2.5 최종 비행시험
HA+RC2S CanSat은 전라남도 고흥군 항공우주연구 원 항공센터에서 모델로켓을 이용하여 발사를 수행하 였으며, 모델로켓 발사 후 캔위성 사출, 낙하산 전개, 그리고 RCSS 전개가 순차적으로 이루어졌다. 추가로 캔위성의 상태정보 수신 및 탑재체 임무 수행 모두 성 공적으로 이루어짐을 확인하였다. 탑재체 임무수행 결 과에 관해서는 다음 절에서 서술하였다.
Figure 12는 캔위성의 상태정보 분석결과로 고도, 자세데이터를 통해 발사 후 15초 후인 14시 40분경에 모델로켓에서 사출됨을 확인하였다. 캔위성은 고도 236 m까지 상승한 후 낙하하면서 임무를 수행하였으 며, Fig. 12의 IMU 데이터로부터 알 수 있듯이 낙하 중 캔위성의 모든 방향에 대해 자세가 불안정한 것을
알 수 있는데, 이는 대회당일 4.2m/s의 강한 풍속이 원인인 것으로 판단된다.
2.5.1 HACS 임무 결과분석
캔위성의 비행임무 중 HACS는 지상국의 명령 전송 에 따라 모든 기능을 정상적으로 수행하였다. HACS는 MCU의 구동명령에 따라 서보모터 구동직후 TMD 유 무에 따른 각각의 카메라가 작동되어 이미지데이터를 획득하며 이때 획득된 이미지데이터들은 모두 SD카드 에 저장된다. Fig. 13은 비행시험 시 획득된 이미지데 이터로 TMD 유무에 따른 사진데이터를 나타낸다.
Figure 13(a)은 TMD를 적용한 사진데이터로 타겟으 로 찍힌 길의 형태가 선명하게 나타나있지만 Fig.
13(b)의 사진데이터를 보면 타겟이 선명하지 않고, 사 진의 모서리로 갈수록 사진데이터가 흐릿한 것을 확인 하였다. 따라서 Fig. 13(b)과 같이 서보모터가 발생시 킨 잔류진동이 이미지데이터에 영향을 주는 것으로 보 아 Fig. 13(a)과 비교하여 적용된 TMD가 진동감쇠에 있어 효과적임을 확인하였다. 이 결과로부터 HACS의 유효성을 검증하였으며, TMD를 적용하지 않았을 시보 다 적용하였을 때 더 선명한 화질의 데이터를 얻을 수 있다고 판단된다.
Fig. 12 HA+RC2S CanSat Status Data
(a) (b)
Fig. 13 Images of CanSat Obtained by HACS during Flight [(a) with TMD, (b) w/o TMD]
2.5.2 RCSS 임무 결과분석
Figure 14와 같이 배터리의 위치에 따라 RCSS의 모터가 구동되어 실시간 이미지데이터 획득에 성공함 을 확인하였다. 하지만 짧은 시간에 많은 양의 데이터 확보로 인해 이미지데이터 일부가 손실되는 현상이 발 생하였다. 캔위성 수거이후 이미지데이터 손실원인을 분석한 결과 지상국의 데이터 처리속도에 문제가 있음 을 확인하였으며, 비행시험 이후 구성품 및 시스템 레 벨시험에서 추가시험을 수행하였다. 실제로 대회 날에 는 30초 간격으로 이미지데이터 처리를 수행하였으며, 지상국에서의 영상처리 시간 부족으로 인해 이미지의 일부 누락되는 현상이 발생한 것으로 판단된다. 이를 보완하여 추가시험 시에는 처리속도를 늘려 45초 간격 으로 이미지 처리를 수행한 결과 이미지 데이터 손실 없이 정상적인 이미지 획득이 가능하였다.
비행시험 시에는 획득된 캔위성의 이미지데이터 중 일부가 손실되어 보다 넓은 시야의 캔위성 이미지를 확인하기엔 어려움이 존재했다. 상기의 문제점 해결을 위해 카메라 렌즈에 광각렌즈를 적용하여 추가시험을 수행하였다. 그 결과 Fig. 15와 같이 캔위성 전체의 이 미지 획득이 가능함을 확인하였다. 그러나 광각렌즈의 특성 상 주변의 외곡이 심하게 발생하나 이는 추가적 인 영상 후 처리를 통해 보정이 가능할 것으로 판단된 다.
Fig. 14 Images of CanSat Obtained by RCSS during Flight
Fig. 15 Additional Test Results of RCSS after Flight Test
3. 결 론
본 논문에서는 HA+RC2S CanSat의 설계 및 검증과 정, 비행시험 결과에 대해 서술하였다. 상기 캔위성의 주요임무는 다수의 표적획득을 위해 모터 고속구동 직 후 카메라에 발생하는 잔류진동을 감쇠시키기 위해 TMD를 적용하였으며, 위의 영상품질 비교를 위해 TMD가 미적용된 카메라를 탑재하여 TMD 적용유무에 따른 이미지데이터를 통해 영상 품질에 대한 비교분석 을 수행하도록 개발하였다. 부가적으로, 지상에서의 조 이스틱 명령에 따라 낙하 중 캔위성 자체의 실시간 이 미지데이터 획득을 위해 RCSS를 개발하였다. 발사 결 과 HA+RC2S CanSat의 상태정보 및 임무데이터 모두 성공적으로 획득하였다. 하지만 캔위성과 지상국간에 데이터 수신 중 RCSS 이미지데이터의 일부가 손실되
는 현상이 발생하였지만, 이는 지상국의 처리속도개선 및 성능 개선된 MCU 적용 시 목적하는 이미지데이터 획득엔 문제없을 것으로 판단된다.
후 기
“이 논문은 조선대학교 『2017학년도 학부생 새싹형 연구인재 지원프로그램』의 지원을 받아 연구되었음”
References
[1] S. H. Won, H. Y. Jun, S. H. Kim and S. R. Lee,
“Very Small Satellite Program for Expending the Space Technology Base: CanSat Competition”, Journal of The Korean Society for Aeronautical and Space Sciences, International Journal of Control, vol.
40, no. 7, pp. 636-645, July 2012.
[2] B. G. Chae, S. H. Kim, H. I. Kim and H. U. Oh,
“Development of P.P.T CanSat System Applying Energy Harvesting System” Journal of The Korean Society for Aeronautical and Space Sciences, vol. 46, no. 4, pp. 315-323, 2018.
[3] G. H. Shin, H. Y. Park, J. K. Seo, T. S. Jang, D.
H. Kim and I. Lee, “Design and Implementation of Electronics for the First National CanSat Competition in Korea” Proceeding of the KSAS 2012 Fall Conference, pp. 914-918, 2012.
[4] http://cansat.kaist.ac.kr/
[5] C. Lee, and B. Chu, “Autonomous Flight Experiment of a Foldable Quadcopter with Airdrop Launching Function” Journal of The Korean Society of Manufacturing Process Engineers, vol. 17, no. 2, pp.
109-117, 2018.
[6] H. I. Kim, J. K. Kim, J. S. Choi, S. H. Kim, and H. U. Oh, “System Development of SCSky CanSat with Smart phone and Wide Swath Scan Camera Mechanism” Journal of The Korean Society for Aeronautical and Space Sciences, vol. 45, no. 2, pp.
154-162, 2017.
[7] H. Krag, M. Serrano, V. Braun, P. Kuchynka, M.
Catania, J. Siminski, M. Schimmerohn, X. Marc, D.
Kuijper, I. Shurmer, A. Oconnell, M. Otten, I. Munoz,
J. Morales, M. Wermuth, D. Mckissock, “A 1cm Space Debris Impact onto the Sentinel-1A Solar Array” Acta Astronautica, vol. 137, pp. 434-443, 2017.
[8] http://www.ni.com
[9] J. S. Bae, J. H. Hwang, J. H. Roh, J. H. Kim, M.
S. Yi and J. H. Lim, “Vibration Suppression of a Cantilever Beam Using Magnetically Tuned-mass- damper” Journal of Sound and Vibration, vol. 331, no. 26, pp. 5669-5684, 2012
![Fig. 13 Images of CanSat Obtained by HACS during Flight [(a) with TMD, (b) w/o TMD]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5101878.326788/9.892.96.406.712.978/fig-images-cansat-obtained-hacs-flight-tmd-tmd.webp)