< 기 술 논 문 >
CopyrightⒸ2012 KSAE / 118-03 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2012.20.4.016 Transactions of KSAE, Vol. 20, No. 4, pp.16-24 (2012)
DGPS를 이용한 GIS기반의 차선 이탈 검지 연구
문 상 찬1)․이 순 걸*2)․김 재 준1)․김 병 수1)
경희대학교 대학원 기계공학과1)․경희대학교 기계공학과2)
Detecting Lane Departure Based on GIS Using DGPS
Sangchan Moon1)․Soon-Geul Lee*2)․Jae-Jun Kim1)․Byoung-Soo Kim1)
1)Department of Mechanical Engineering, Graduate School of Kyunghee University, Gyeonggi 446-701, Korea
2)Department of Mechanical Engineering, Kyunghee University, Gyeonggi 446-701, Korea (Received 18 April 2011 / Revised 19 July 2011 / Accepted 26 January 2012)
Abstract : This paper proposes a method utilizing Differential Global Position System (DGPS) with Real-Time Kinematic (RTK) and pre-built Geo-graphic Information System (GIS) to detect lane departure of a vehicle. The position of a vehicle measured by DGPS with RTK has 18 cm-level accuracy. The preconditioned GIS data giving accurate position information of the traffic lanes is used to set up coordinate system and to enable fast calculation of the relative position of the vehicle within the traffic lanes. This relative position can be used for safe driving by preventing the vehicle from departing lane carelessly. The proposed system can be a key component in functions such as vehicle guidance, driver alert and assistance, and the smart highway that eventually enables autonomous driving supporting system. Experimental results show the ability of the system to meet the accuracy and robustness to detect lane departure of a vehicle at high speed.
Key words : Differential global positioning system(정밀위성측위시스템), Geographic information system(지리정 보시스템), Real time kinematic(실시간측위), Detecting lane departure(차선이탈검지), Vehicle safety(차량안전), Intelligent future vehicle(지능형 미래자동차)
1. 서 론1)
전자기술 및 컴퓨터의 비약적인 발전에 힘입은 자 동차의 전자화와 사람들의 생활수준의 향상에 따라 차량 자체의 편의성 및 기능 향상뿐 아니라 외적인 안전성을 높이는 기술이 사용자들에 의해 요구되고 있다. 이에 따라 차량의 안전성에 대한 연구가 활발 히 진행되고 있다. 영상기반의 차선인식을 통해 차 선이탈을 예방하거나, GPS가 탑재된 내비게이션을 사용하여 차량의 위치와 주행경로를 실시간으로 파 악함으로써 주행안전을 도모하는 것이 이것이다.1-3) 기존의 부주의한 차선변경을 예방하기 위한 기술
*Corresponding author, E-mail: [email protected]
로서 차선이탈경보시스템(LDWS: Lane Departure Warning System)이 개발되었으며, LDWS는 영상카 메라를 이용하여 차선인식을 수행하고 초음파센서 를 사용하여 차선 변경시 측면과 후방의 주변 차량 간의 거리를 측정함에 따라 차선을 인지하는데 맞 추어져 왔다.4)
해외에서는 DGPS의 위치 정밀도를 높이는 연구 가 활발히 진행중이며,5) 특히 저가형태로 여러형태 의 DGPS 수신 조건(multi-path)6,7) 및 데이터 정밀도 를 향상에 관한 연구가 진행중이다.8) 또한 INS센서 와 DGPS를 융합하여 정밀도를 높인 궤적추출 시스 템을 통해 이동경로에 대한 연구가 활발히 진행중 이다.9-11)
DGPS를 이용한 GIS기반의 차선 이탈 검지 연구
본 연구에서의 초점은 기존 연구들과는 달리 GIS 의 차선데이터와 RTK/DGPS 정밀위치센서의 차량 데이터를 비교함으로써 주야간 및 악천후에서도 차 선이탈감지에 대한 신뢰성을 높이는데 목적이 있 다.12) 이와 유사하게 vision를 기반으로 차선을 감지 못하는 부분에 대한 보정정보로 GPS를 이용한 연구 가 있으며, 실차를 이용하여 DGPS 위치값을 통한 차선변경 검지 연구가 진행되어 측정 평균값을 통 한 후검지 방법을 이용하였다.13-15)
본 논문에서는 조명변화나 기상상태에 민감하지 않는 자동차 주행궤적에 대한 신뢰도가 높은 DGPS 정밀위치센서를 이용하여, 자동차의 정밀한 위치추 적 뿐만 아니라 GIS 차선데이터와의 비교를 통해 차 선이탈판정의 정확성을 높였다.16) 자동차의 정밀 위 치데이터로 주행궤적을 분석하고, 차선이탈시 방향 지시등을 이용한 필터링도 동시에 제안하여 실험을 통해 검증함으로써 안전한 차선변경 및 미래형 자 동차의 자율주행에 대한 기초자료로도 유용하게 사 용될 것으로 기대된다.
2. 자료 수집 및 조사과정 2.1 조사장소 및 장비
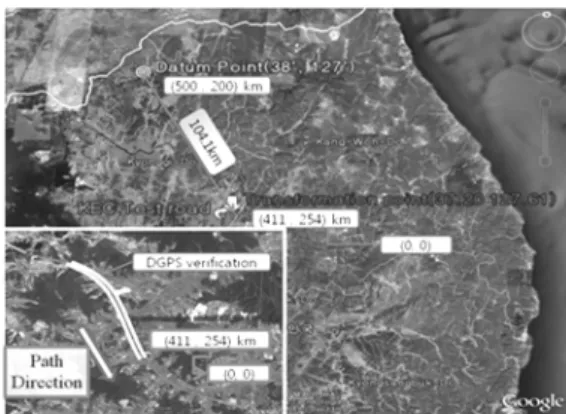
실험은 폭이 180cm인 차량을 Fig. 1과 같이 KEC test road 1km 구간에서 실시했다. 본 실험에서는 직 교좌표계로 표시된 GIS 데이터와의 비교분석을 위 해 TM투영식(Gauss-Kruger projection)을 이용한 직 교좌표계의 X 및 Y 좌표값을 확보했다. 경위도 좌 표는 각 나라마다 그 기준점이 있는데 우리나라의 X축 기준점은 경도 127도로 평면직각좌표계로 변 환하였을 때 TM 좌표를 활용하여 거리좌표가 200Km로 산출되며, Y좌표 역시 같은 방법으로 변 환하여 위도 38도로 평면직각좌표계로 변환하여 500Km로 산출된다. 이때 실험도로와 데이터 표기 단위를 m로 하기 위하여 411Km, 254Km를 변환기 준점으로 (0,0) 좌표로 지정했다. Fig. 1의 좌측 하단 에 KEC 테스트 도로와 구글맵을 비교하여 2개의 유 선으로 나타내었다.
시험도로는 2.4GHz의 Wi-fi 통신이 가능하며, 자 동차에 장착된 DGPS 이동국에서 보정데이터를 받 기위해 원격지에서 직렬통신 장비들을 제어 및 관
Fig. 1 Datum point and KEC test road in the Google map
Table 1 SMART-V1 general specification
면적 지름 115 mm 높이 90 mm
무게 575 g
입력 전압 +9 to +28.0 VDC
전력 소비 1.8 W
데이터 속도 20Hz
측정오차 L1 C/A 코드 18cm RMS
시간 정확성 20ns RMS
속도 정확성 0.03m/s RMS
리할 수 있는 외장형으로 되어 RS-232 신호를 무선 랜 신호로 바꾸어주는 CSW-80를 이용하였다. Table 1 은 DGPS 기지국 및 이동국으로 사용된 SMART-V1 의 사양이다. 본 실험에 사용된 DGPS 장비는 캐나 다 NovaTel Inc.의 제품으로 0.18m의 위치 정확도를 가지며, 20Hz 샘플링을 가지고 있다. 본 연구는 정 밀위치인식으로 차선이탈을 검지하므로 정밀도가 높은 사양이 요구된다.
DGPS 기지국은 지상 건물 등의 신호 반사물에 왜 곡되어 발생하는 오차를 줄이기 위해 Fig. 2와 같이 수신확보가 잘되는 시야가 확 트인 시험도로 주변 높은 위치에 설치하였다. 기준점에 대한 신뢰성과 반복실험에 따른 기준국의 오차를 줄이고자 기준국 경위도 좌표를 고정값으로 설정하였으며, 기지국의 기준 위치정보를 이동국과 주고받도록 무선통신이 가능하도록 구성한다.
이동국 DPGS 안테나는 설치 위치에 따라 차선에 대한 위치인식이 달라지기 때문에 Fig. 3과 같이 자 동차 중앙에 위치시켜 안테나 설치위치에 따른 오 차를 최소화시켰다. CSW-80 송수신기 역시 데이터
Sangchan Moon․Soon-Geul Lee․Jae-Jun Kim․Byoung-Soo Kim
Fig. 2 DGPS base Fig. 3 RTK rover and antenna
Fig. 4 The overall structure of basic DGPS/RTK setup
의 수신과 송신을 원활히 하여 기준국의 RTCM 보 정신호를 받아 위치계산에 적용시켜 이동국에서의 위치계산에 따른 발생오차를 줄이고 정밀한 위치 결과값을 얻도록 설정했다. 도로에 구축된 Wi-fi 망 을 이용하여 안정적인 전송이 가능하지만, 간혹 불 규칙하게 DGPS모드가 풀리는 경우에도 일정시간 만큼 자체적으로 보정신호를 일정하게 전송해 주기 때문에 일시적 끊김현상에 대해 대비하였다. 본 실 험중에는 짧은 구간의 직선구간을 진행했기 때문에 위와 같은 현상이 발생하지 않았다. 보정신호를 받 은 GIS 차선데이터의 정밀위치 정밀도는 차선의 설 계오차가 2~5mm이며, DGPS측정오차가 20cm이므 로, 차폭을 고려한 여유간격을 90~110cm로 규정했 을때 보다 신뢰성높은 정밀도가 필요하다.
전체시스템의 데이터 전송은 Fig. 4와 같이 무선 Wi-Fi 기반으로 GIS 데이터 정보를 가지고 있는 주 서버, DGPS 이동국, DGPS 기준국 간의 통신에 의해 이루어진다. 무선랜을 지원하지 않는 이동국의 경 우는 전술한 바처럼 RS-232를 무선랜으로 변환하는 모듈을 이용하였다.
2.2 데이터 변환과 검증
DGPS의 수신 데이터는 위도와 경도 값으로 얻어 지므로 차선의 GIS데이터와 비교하기 위해서는 X 및 Y의 직교좌표값으로 변환이 필요하다. 단순 변 환은 지구의 타원 형태와 시간 및 각도변화에 따라 큰 오차를 발생시키기 때문에 우리나라 기준에 맞 고 정밀한 가우스-크루거가 제시한 TM 투영식을 이 용한다.
경위도 좌표를 X 및 Y 좌표로 변환하기 위해서는 변환식에 맞는 기준값이 필요하다. 좌표변환은 각 지역마다 다른 기준값의 적용과 해석의 차이에 따 라 다른 값을 갖는다. 따라서 본 연구에서는 WGS84 타원체를 기준으로 경위도 좌표를 평면으로 투영시 키기 위해서 우선 식 (1)과 같이 투영된 좌표값을 적 용시키며 투영된 좌표값은 중앙자오선 값에 따라 변화값이 된다.
cos (1)
여기서, 는 측정 경도좌표이고 는 우리나라 기 준 경도 좌표이다.
식 (2)는 위도측정값에 따른 Y 좌표 변환식이다.
∆ 는 중앙자오선으로 부터의 차이값을 말하며, 우리나라는 500,000 m의 값을 가진다. 이때 K0는 원 점축적계수로서 1의 값을 갖는다.
․․
′
(2)여기서, tan
이고 e2은 제1 이심율을, ′은 제2이심율을 나타낸다.
위도 Ø에 따른 모유선의 곡률반경을 나타내는 식 은 (3)과 같다.
sin (3)
이때 는 타원체의 장반경이고 는 측정된 위도값 을 나타낸다.
식 (4)는 경도 측정값에 따른 X좌표 변환식이다 투영원점에 대한 자오선호장은 식 (4)에서 M0로 표 현되며 우리나라는 위도 38도가 기준점이 된다.
Detecting Lane Departure Based on GIS Using DGPS
․
tan․
′
여기서, 타원체단반경 이고 는 타원 체의 편평율로서 WGS 타원체에서 0.0036281의 값 을 갖는다.
DGPS 위치데이터의 검증을 위해 시험도로의 직 선 2km 구간을 대상으로 실차 실험을 수행하였다.
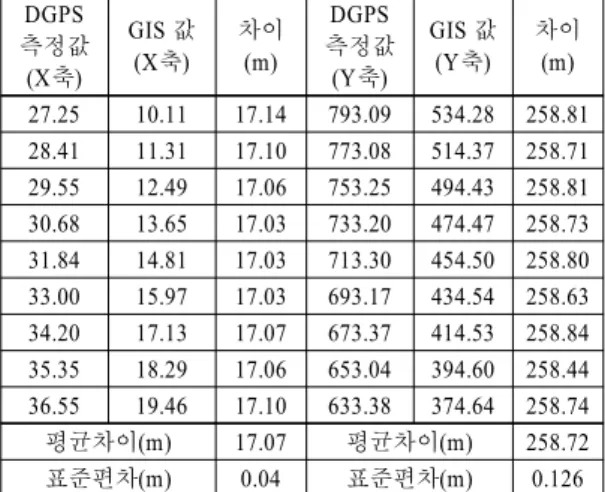
Table 2에서는 이동중 차선의 DGPS 측정치와 이에 대응하는 GIS 데이터 값을 비교했다. 두 데이터 간 에는 상대적으로 무시할 수 없는 크기의 오차를 가 지나 그 표준편자가 X좌표에 대해서는 0.04, Y좌표 에 대해서는 0.126으로 차선이탈검증 목표오차보다 낮은 값을 가진다. 이는 DGPS 측정값에 평균오차의 일정한 크기의 편차를 고려하면 GIS 차선 데이터 값 과의 비교 판별이 가능함을 나타낸다.
Fig. 5 DGPS data matching on CAD of GIS data
Table 2 Comparison of GIS data and DGPS data DGPS
측정값 (X축)
GIS 값 (X축)
차이 (m)
DGPS 측정값
(Y축)
GIS 값 (Y축)
차이 (m) 27.25 10.11 17.14 793.09 534.28 258.81 28.41 11.31 17.10 773.08 514.37 258.71 29.55 12.49 17.06 753.25 494.43 258.81 30.68 13.65 17.03 733.20 474.47 258.73 31.84 14.81 17.03 713.30 454.50 258.80 33.00 15.97 17.03 693.17 434.54 258.63 34.20 17.13 17.07 673.37 414.53 258.84 35.35 18.29 17.06 653.04 394.60 258.44 36.55 19.46 17.10 633.38 374.64 258.74
평균차이(m) 17.07 평균차이(m) 258.72
표준편차(m) 0.04 표준편차(m) 0.126
시험도로의 GIS 데이터를 기반으로 한 실험영역 을 Fig. 5에 표시하였다. Table 2의 편차를 적용하여 보정된 DGPS 측정값을 그림 상에 작은 원으로 표시 된 점으로 나타냈다. 이는 점선으로 표시된 GIS 차 선의 위치와 거의 일치하며 DGPS 측정값과 GIS 차 선 데이터를 비교하면 차선이탈 판별이 가능함을 보여준다. 이처럼 단순 비교를 통한 GIS 데이터와 DGPS 측정값으로 차선이탈 판정에 이용될 수 있음 을 알 수 있다.
3. DGPS 차선이탈 알고리즘 방법론 3.1 차선이탈 알고리즘
Fig. 6에서 XG와 YG는 Table 2의 편차값을 적용 하고, 지역 기준점의 직각좌표를 기준으로 DGPS의 경위도 위치 정보를 X 및 Y 좌표로 변환하여 얻어 진 값이다. 차량 위치값은 시험도로의 GIS 차선데이 터와 비교하게 된다. 차량 진행방향 전방의 좌우 두 점과 후방의 좌우 두 점을 제어 기준점으로 지정하 여 영역을 설정한다. 전방 및 후방 점을 하첨자 2와 1로 각각 나타내어 Fig. 6의 좌, 우측 차선상의 GIS 제어점들을 각각 L1, L2, R1, R2로 나타냈다.
Fig. 6에서 차량의 기준좌표(X', Y')는 DGPS 위치 값이 고려된 차선과 평행한 좌표축이다. 또한 좌우 의 4개의 제어 기준점은 차량 폭을 고려한 편차값을 적용한 GIS 차선 위치값이다. 따라서 수작방향의 상 대적 위치값을 기준 제어점에 적용하여 우측차선은 (RX1, Ry1), (Rx2, Ry2), 좌측차선에는 (Lx1, Ly1), (Lx2, Ly2) 로 나타냈다.
차량이 움직이는 동안 빠른 처리를 위해서 좌측 경계차선은 L1 및 L2 점들을 잇는 직선으로, 우측 경계선은 R1 및 R2 점들을 잇는 직선으로 설정했다.
보정된 DGPS 위치값이 경계선을 각각 넘어가는 경
Fig. 6 Lane of the virtual boundaries
문상찬․이순걸․김재준․김병수
우에, 쉽게 차선이탈을 판정할 수 있다. 신속한 차량 과 차선간의 간격의 계산을 위한 식을 식 (5)와 식 (6) 에 나타냈다. 이탈경계차선의 Rx와 Lx는 차량위치 좌표 (XG,YG)와의 상대적 비교를 통하여 좌, 우측에 대한 차선이탈 여부를 식 (5)와 식 (6)에서와 같이 판 단하게 된다.
×
(5)
×
(6) 여기에서 Ly는 좌측과 우측 경계선과 비교시 같 은 값을 나타내는데, 이는 경계선과 차량 진행방향 을 평행하도록 설정했기 때문에 같은 값을 가진다.
곡선도로에서는 고속도로 곡률반경의 경우 보편 적으로 2,000 m로 곡선길이는 320 m의 짧은 구역으 로 설정된다. 급커브구간을 제외한 구간에서 GIS 차 선 형태가 직선의 연속으로 설정하였으며, LDWS 해법과 유사하게 본 오차를 적용시켰다. 또한 차량 바퀴와 차선과의 거리를 고려할 때14)와 같은 곡선 도로의 길이를 clothoid 방법을 통해 차선을 특징화 시켜 직선화 하였다.
선행연구된 Yiguang Xuan외(2006)에서처럼 차선 의 정밀도를 높여야 하며, 차량의 DGPS위치데이터 를 통한 평균값으로 데이터 비교분석을 하여 차선 변경에 대한 여부만을 판별하는 기초적인 알고리즘 을 제시하였다.15)
본 연구에서도 실시간의 이탈검지를 위해 보다 신뢰도와 정밀도가 높은 GIS 차선데이터가 필요하 다. 그러나 세밀한 GIS 격자 데이터를 사용에 따른 DB 유지비용 및 데이터 통신 소통량 증가로 실시간 차량적용에 어려움이 있다. 따라서 GIS 데이터 값을 대략 100km/h 속도에서 25m 간격으로 기준점을 추 출하여 DB를 구성하였으며. 차선의 길이는 대략 8m, 데이터 전송속도는 20Hz로 설정했다.
3.2 알고리즘 적용 소프트웨어 개발
차선이탈 모니터링 프로그램은 식 (5) 및 식 (6)을 적용하여 DGPS의 좌표변환 위치 값을 실선으로, GIS 데이터 값을 가진 이탈 경계선을 점선으로 Fig. 7
Fig. 7 Monitoring program for detecting lane departure
에 나타냈다. 빠른 처리가 가능하도록 하기 위해서 DGPS가 차량의 보닛 중간에 위치하도록 하였다. 시험 도로의 차선폭이 3.6 m이고 시험 차량의 폭이 1.8 m 이므로 차량이 차선의 중앙에 정확히 위치한 경우 차량과 차선 간 좌우측 간격은 각각 0.9 m가 된다.
모니터링 프로그램은 표시된 1개의 실선과 2개 경 계선을 나타내는 점선의 비교를 통하여 차선이탈 여부를 즉시 판별할 수 있다. 게다가 차량과 차선간 의 간격 및 차량의 궤적 역시 실시간으로 보여 준다.
차선 이탈이 발생하는 방향의 경고 창은 운전자에 게 시각적으로 알려준다.
차선 이탈이 발생할 때는 경고창은 빨간색으로 변하며, 정상 주행일 때는 녹색으로 표시된다. Fig. 7 의 확대 표시된 경고창은 차량이 우측차선을 이탈 했을 때의 경우를 보여준다. 차선을 이탈시에는 경 고창에 빨간색으로 변하는 것을 볼 수 있다.
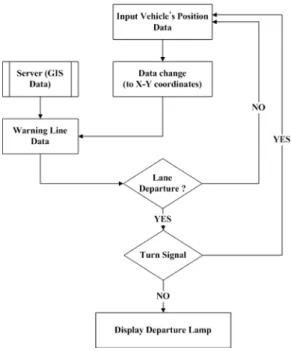
차량의 궤적에 따른 차선이탈 감지알고리즘의 과 정을 Fig. 8에 나타냈다. 의도적인 차선 이탈을 고려 하고자 차량의 방향지시등 정보를 알고리즘에 추가 시켰다. 만약 차량이 차선을 이탈하더라도 이탈방 향과 방향지시등이 일치하게 되면 정상적인 차선변 경으로 간주하여 진행하도록 했다.
4. 차선이탈 실험 및 분석 결과 실험에 적용한 DGPS의 위치 정밀도를 18 cm수준 으로 유지시키기 위한 통신환경을 갖추고 실험에 임하였다. 또한 간헐적으로 발생하는 오차는 차량 의 데이터 획득률과 거리를 고려하여 80 cm이상은 큰 노이즈로 제거하며, 작은 노이즈상황에서도 간 단히 Kalman filter를 적용시켜 Fig. 9와 같이 위경도
DGPS를 이용한 GIS기반의 차선 이탈 검지 연구
Fig. 8 Flow chart of lane departure
Fig. 9 DGPS data used Kalman filter
좌표의 노이즈 편차를 줄였다.
실험차량은 2km 직선구간에서 훈련된 운전자에 의해 주행을 하였으나 약 60km/h의 속도로 빠르게 진행되어 실험 시나리오대로 정확하게 진행될 수는 없었다. 따라서 수차에 걸친 실험을 진행하여 지그 재그로 차선을 변경시키며 실제 알고리즘 검증을 하였다. 기준국과 이동국간의 보정데이터를 받기 위해 Wi-Fi(2.4GHz)망에서의 통신점검을 하였고, 차선이탈 검지에 필요한 경위도 좌표와 고도 데이 터만을 이용했다.
차량 위치좌표의 측정 및 전달의 적합성은 Fig. 10 및 Fig. 11과 같이 GIS 데이터와의 비교 확인을 통하 여 점검하였다. 먼저 정상주행 판정의 확인을 위하
Fig. 10 Driving test without lane change
여 Fig. 10처럼 차선 내에서 정상주행을 수행하여 차 선이탈 알고리즘에 대한 1차 검증을 하였다. 1, 2차 선의 외곽선을 직사각형 마크를 연결한 실선으로 나타냈고, 중앙차선은 지그재그로 표현된 선으로 나타냈다. 그리고 차량의 폭을 감안한 가상의 차선 이탈 경계는 파란색 점선으로 나타내고 차량의 주 행궤적을 실선으로 표시하여 20 Hz로 1초에 20번 수신되는 데이터를 연속적으로 표시되도록 하였다.
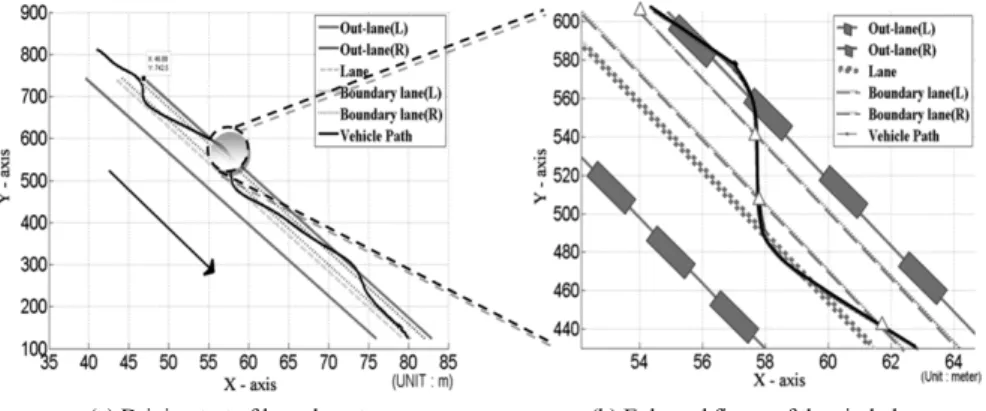
Fig. 10은 정상주행의 경우이기 때문에 차량 궤적을 나타내는 실선이 두 개의 점선(이탈경계선)내에서 만 위치함을 볼 수 있다. 이는 차선변경 없이 정상주 행 했음을 의미한다. Fig. 10과 같이 차선변경 없는 주행을 통하여 DGPS 측정위치와 GIS 차선데이터 간의 비교 검증 확인을 수행한 후, 훈련된 운전자에 의한 차선이탈 실험을 Fig. 11에서 나타낸 것처럼 주 행하였다. Fig. 11은 매 이탈 순간을 궤적 상에서 삼 각형 표시로 나타낸다. 매 순간 운전자는 경고창의 이탈 경고 표시를 통하여 차선의 이탈여부를 확인 할 수 있었다. Fig. 12는 차량이 차선이탈을 하는 순 간지점을 확대하여 보여준다. 차량의 X 좌표가 53.35m 일 때 주행 차선 내에 있으며, 차선이탈이 발 생하는 (53.35, 616)에서는 Fig. 11의 확대 구간의 이 탈표시처럼 차선을 이탈하게 되는 시점이 된다. Fig.
12는 매우 짧은 순간의 일정한 속도로 움직이는 차 량의 궤적을 차선과 비교하여 나타낸 것이다. 주행 궤적은 실선으로 나타냈으며 시간의 따른 차선과 차량의 간격은 선형적임을 보여준다. 따라서 일반 적인 운행 조건 하에서도 짧은 순간에 주어진 차량 정보를 통해 차량의 차선이탈여부를 판별 할 수 있
Sangchan Moon․Soon-Geul Lee․Jae-Jun Kim․Byoung-Soo Kim
(a) Driving test of lane departure (b) Enlarged figure of the circled area Fig. 11 Experimental result for determining lane departure
Fig. 12 The distance between the border lane and the vehicle
Fig. 13 Lane departure (right lane)
게 된다. 모니터링에 표시된 주행궤적으로부터 차 선이탈에 대한 실시간 프로그램 검증을 Fig. 13에 나 타냈다.
실선이 아래쪽 점선 밖으로 표시되어있는데 주행 방향이 우측방향으로 진행되었기 때문에 우측차선 에 대한 이탈 표시와 경고창의 표시를 나타내고 있다.
Fig. 14 Return to normal driving
Fig. 14에서 주행궤적에 대한 표시창 밑에 경고창이 있는데 우측차선 이탈 경고표시가 변하는 것을 확 인 할 수 있었다.
운전자의 주행궤적이 우측차선 이탈 후 다시 차 선 안으로 복귀하여 정상주행이 하는 것을 Fig. 14를 통해 볼 수 있다. 정상주행 시에는 경고램프의 창이 녹색으로 변하는 것도 동시에 볼 수 있다.
5. 결론 및 향후 과제
본 연구에서는 차선이탈을 검지하는 알고리즘과 그에 따른 방법을 제시했다. 고속도로의 넓은 범위 를 정확하게 측정할 수 있도록 측정정확도가 18cm 인 DGPS/RTK를 이용하였다. DGPS의 측정값은 지 역 기준점을 반영한 X, Y 좌표로 변환하였으며 이 를 GIS 차선 데이터와 비교 검증하였다. GIS DB로 부터 주행차량을 둘러싸고 있는 4개의 제어 기준점
Detecting Lane Departure Based on GIS Using DGPS
을 경계로 지정하여 효과적이고 빠른 차선이탈 판 별 알고리즘을 도출하였다.
또한 제약 없는 고속도로 주변 환경 내에서 실차 실험을 통하여 시스템의 동작을 검증하였다. 제안 된 알고리즘의 신뢰성과 정확도가 차량과 차선의 간격 측정에도 적합함을 증명하였다. 제안된 방법 과 알고리즘의 확인은 실험을 통하여 증명하였고, 다양한 조건하에서도 영상촬영 및 모니터링을 비교 하여 평균 18 cm이하의 유효값을 확인하였다.
본 논문에서 제시한 차선 이탈판정은 보다 안전 한 주행과 부주의시 차선이탈에 대한 경보시스템에 사용될 수 있을 뿐 아니라 전방 및 측방 차량의 정보 교환이 주어진다면 사고 예방에 큰 도움이 될 것으 로 판단된다.
DGPS 이용한 차선이탈검지 시스템은 고가의 수 신기를 통해 제한성이 있으나, 성능면을 고려한 저 가의 GPS 수신기 개발이 되어 대체 가능하며, 도로 기준국 및 인프라 구축비용에 비하면 개별 시스템 적용에는 제한점이 없을 것으로 본다.
또한 고속도로의 곡률반경이 크기 때문에 차선간 직선화를 통하여 동일한 방법을 적용하여 세분화함 을로써, 곡선구간에 적용가능하다. 보다 일반적인 처리를 위해서 Bezier 또는 spline 커브로 맞추어 모 델링을 알고리즘에 적용하면, 곡선의 경우와 혼재 된 경우에도 적용가능하다. 추가적으로 INS 및 영상 신호를 융합한 센서퓨전을 통해 신호 끊김을 보완 하고 100Hz 주기를 통한 데이터 보정주기를 줄일 수 있을 것으로 보인다.
추후 영상 처리와 RFID 등 도로에서 주행하는 자 동차를 기반으로 한 기술적 퓨전이 필요하며, RTK- DGPS의 상용화를 위해 고속도로상 복합통신망 구 축이 필요하며, 기준국도 10km단위로 둠으로써 정 밀보정이 가능하리라 본다. 또한 주행궤적 분석을 통한 이탈유형 판정을 초기적 필터링으로 판별하여 운전자의 부주의한 차선이탈 유형을 분석하고 대처 하는 방안의 제시가 주어진다면 보다 활용성이 높 을 것으로 사료된다.
후 기
본 연구는 국토해양부 건설기술혁신사업의 연구
비지원(과제번호#10CCTI-A050948-04-000000)과 지식경제부 및 한국산업기술평가관리원의 산업융 합원천기술개발사업(정보통신)의 일환으로 수행하 였음. [10040990, UTIS 연동 통신기술 및 도심형 교 통안전지원 서비스개발]
References
1) J. H. Song and W.-S. Lee, “Lane Departure Warning Based on Driver Monitoring,” Annual Conference Proceedings, KSAE, KSAE08-A0406, 2008.
2) J. Lee, S. Moon, K. Yi, B. Yun and S. Yu, “A Lane Departure Warning Algorithm and For- ward Collsion Warning Algorithm with an Only One Camera,” Annual Conference Pro- ceedings, KSAE, KSAE09-A0318, 2008.
3) J. H. Ryu, S. B. Sim, D. H. Shin, J. K. Lee and I. S. Lee, “Evaluation for Vision Sensor Output via DGPS RTK,” Spring Conference Pro- ceedings, KSAE, KSAE06-S0227, 2006.
4) K. Huh, B. Park and D. Hong, “Development of a Lane Departure Avoidancee System Using Vision Sensor and Active Steering Control,”
Transactions of KSAE, Vol.11, No.6, pp.222- 228, 2003.
5) M. Matosevic and Z. Salcic, “A Comparison of Accuracy Using a GPS and a Low-cost DGPS,”
IEEE Transactions on Instrumentation and Measurement, Vol.55, No.5, pp.1677-1683, 2006.
6) Y. Morales and T. Tsubouchi, “DGPS, RTK- GPS and StarFire DGPS Performance Under Tree Shading Environments,” Proceedings of the IEEE International Conference on Integ- ration Technology, pp.519-524, 2007.
7) Y.-S. Kim, B. K. Kim, K. Ohba and A. Ohya,
“Localization of Outdoor Mobile Robot with Multi-path Bias Detection,” International Con- ference on Mechatronics and Automation, pp.705-710, 2007.
8) Y. Zhang and C. Bartone, “Improvement of High Accuracy DGPS with Real-time Wave Smooth Multipath Mitigation Technique,” Proceedings of IEEE Aerospace Conference, Vol.12, pp.1825- 1836, 2005.
문상찬․이순걸․김재준․김병수
9) G. H. Elkaim, M. Lizarraga and L. Pedersen,
“Comparison of Low-cost GPS/INS Sensors for Autonomous Vehicle Applications,” ION/IEEE Position, Location and Navigation Symposium, pp.285-293, 2008.
10) R. T.-Moreo and M. A. Z.-Izquierdo, “IMM- based Lane-change Prediction in Highways with Low-cost GPS/INS,” IEEE Transactions on Intelligent Transportation Systems, Vol.10, No.1, pp.180-185, 2009.
11) H.-S. Tan and J. Huang, “DGPS/INS-based Vehicle Positioning with Novel DGPS Noise Processing,” American Control Conference, pp.3967-3971, 2006.
12) K. Li and G. Liu, “Combined Positioning Method for Improving the GPS Positioning
Accuracy,” Journal of Southeast University (Natural Science Edition), Nanjing, Vol.34, S1, pp.88-91, 2004.
13) J. M. Clanton, D. M. Bevly and A. S. Hodel,
“A Low-cost Solution for an Integrated Multisensor Lane Departure Warning System,”
IEEE Transactions on Intelligent Transporta- tion Systems, Vol.10, No.1, pp.47-59, 2006.
14) A. Eidehall, J. Pohl and F. Gustafsson, “Joint Road Geometry Estimation and Vehicle Trcking,”
Control Engineering Practice, Vol.15, pp.1484- 1494, 2007.
15) Y. Xuan, “Land Change Maneuver Detection from Probe Vehicle DGPS Data,” IEEE Intelli- gent Transportation Systems Conference, pp.624- 629, 2006.