≪연구논문≫ Journal of the Korean Magnetics Society 27(2), 54-62 (2017) https://doi.org/10.4283/JKMS.2017.27.2.054
− 54 −
A Study of Design for Interior Permanent Magnet Synchronous Motor by using d-q Axis Equivalent Circuit Method
Young-Kyoun Kim*
Department of Electrical Engineering, Osan Univ., Osan 18119, Korea
(Received 2 March 2017, Received in final form 8 March 2017, Accepted 10 March 2017)
This paper presents a design of the Interior Permanent Magnet Synchronous Motor (IPMSM). an initial design process is accomplished by using the parametric design. In the design process, motor characteristics of parameters is computed by the d-q axis equivalent circuit model. Then, an optimal design process is accomplished by combination the experimental design and the response surface method. Finally, the design and analysis results are verified with experimental results.
Keywords : finite element method, IPMSM, optimal design, response surface method, torque ripple
d-q축 등가회로 해석기법을 이용한 180 W급 IPMSM 설계에 관한 연구
김영균*
오산대학교 전기과, 경기 오산시 청학로 45, 18119
(2017년 3월 2일 받음, 2017년 3월 8일 최종수정본 받음, 2017년 3월 10일 게재확정)
본 논문은 압축기 구동용 180 W급 매입형 영구자석 동기 전동기의 설계에 관하여 기술하였다. 먼저 전동기의 초기설계는 d-q 등가회로 모델을 이용한 해석기법을 이용하여 전동기 파라메타범위를 선정하고 이를 만족하는 초기형상을 도출하였다. 그리고, 전동기의 토크 리플을 저감하기 위해서 최적설계를 수행하였다. 최적설계는 실험계획법과 반응표면법을 이용하였으며, 끝으로 설 계결과에 대한 타당성은 실험을 통해서 검증하였다.
주제어 : 매입형 영구자석 동기전동기, 토크 리플, 최적설계, 반응표면법, 유한요소법
I. 서 론
오래전부터, 화석자원의 고갈에 대한 우려와 지구 온난화에 대한 염려가 증대되고 있다. 따라서 국가전력에너지 소비량의 약 60 %를 차지하고 있는 전동기에 대한 효율증대를 위한 노 력이 끊임없이 요구되고 있다.
따라서, 본 논문에서는 압축기 구동용 전동기로서, 매입형 영구자석 동기전동기(IPMSM)의 설계에 관해서 기술하였다.
영구자석 동기 전동기는 DC 전동기, 유도 전동기 및 릴럭턴 스 전동기와 비교하여 일반적으로 높은 효율특성을 갖는다.
특히, 영구자석 동기 전동기 중에서, 영구자석을 회전자 철심 에 매립한 구조를 지닌 IPMSM은 마그네틱 토크외 추가적으 로 릴럭턴스 토크를 발생하므로 훨씬 더 높은 효율 또는 출
력을 낼 수 있다. IPMSM은 이러한 장점 때문에 고출력 밀 도 또는 고효율을 요구하는 하이브리드 자동차의 구동 모터 에서부터 소형 가전기기에 이르기까지 그 적용 범위가 다양 하다[1-3].
본 논문에서는 압축기 구동용 IPMSM의 특성해석 및 설계 에 대한 제반사항을 기술하였다. 초기설계를 위해서 d-q 등가 회로 해석기술을 도입하였으며, 토크 리플 저감을 위해서 실 험계획법과 반응표면법을 적용하여 최적설계를 수행하였다.
그리고 특성해석과 설계결과에 대한 타당성은 실험을 통해서 검증하였다.
II. 영구자석 매입형 전동기 설계 및 특성해석 1. d-q 등가 모델을 이용한 IPMSM의 특성해석
IPMSM의 3상 전압방정식은 d-q축으로 분해하여 2상으로 나타낼 수 있다. 전동기의 회전자에 기준을 둔 기준 d-q좌표
© The Korean Magnetics Society. All rights reserved.
*Corresponding author: Tel: +82-31-370-2672, Fax: +82-31-370-2679, e-mail: [email protected]
계로부터 전동기를 해석하면 마치 직류기처럼 시간에 따라 변 하는 변수가 없기 때문에 전동기 특성해석을 용이하게 할 수 있다. 따라서 3상 좌표계의 전압 방정식은 좌표 변환 행렬을 이용하여 d-q 등가 모델로 변환할 수 있다.
동기전동기의 3상 전압방정식은 다음 식과 같이 행렬식으 로 표현할 수 있으며, 각각의 파라미터는 Table I에 나타내었 다[2, 3].
(1)
식(2)는 3상 좌표계를 d-q축으로 변환할 때 사용하는 변환 행렬식을 나타낸다.
(2)
식(2)를 사용하여 3상 전압방정식(1)은 다음 식(3)과 같이 2 상 d-q축 전압방정식으로 표현할 수 있다.
(3)
식(3)의 방정식은 전동기의 철손을 고려하지 않는 이상적인
경우를 표현한 전압 방정식이라 할 수 있다. 일반적으로 전 동기의 효율에 영향을 주는 철손은 등가철손저항을 묘사하여 고려할 수 있다. Fig. 1은 전동기의 철손을 고려하기 위해서 등가철손저항 Rc를 d-q축 등가회로에 병렬로 삽입하여 표현 한 것이다.
(4)
(5)
(6)
철손저항을 고려한 등가회로로부터 d-q축 등가회로의 d-q축 전류는 식(4)와 식(5)로부터 식(6)과 같이 구할 수 있다. 그리 고 식(6)으로부터, 전동기의 토크, 동손, 철손 및 효율은 다음 식과 같이 각각 계산할 수 있다.
(7) (8)
(9)
(10) 여기서, Pn은 극 쌍수이며, 철손저항 Rc는 다음 식으로부터 Vu
Vv Vw
=
Ra + pLu pMuv pMwu pMuv Ra + pLv pMvw pMwu pMvw Ra + pLw
iu iv iw
−
wΨf sinθ wΨf sin θ − 2
3---π
⎝ ⎠
⎛ ⎞
wΨf sin θ − 4 3---π
⎝ ⎠
⎛ ⎞
C = 2 3---
cosθ cos θ − 2 3---π
⎝ ⎠
⎛ ⎞ cos θ − 4 3---π
⎝ ⎠
⎛ ⎞
− sinθ − sin θ − 2 3---π
⎝ ⎠
⎛ ⎞ − sin θ − 4 3---π
⎝ ⎠
⎛ ⎞
Vd
Vq = Ra + pLd − wLd wLd Ra + pLd
id iq + 0
wΨa
vd
vq = Ra iod
ioq + 1 + Ra Rc ---
⎝ ⎠
⎛ ⎞ vod
voq + p Ld 0 0 Lq
iod ioq
vod
voq = 0 − ωLq ωLd 0
iod ioq + 0
ωΨa icd = − ωLqioq
Rc
---, icd = ω Ψ( a + Ldiod) Rc ---
T = Pn{Ψaioq + (Ld − Lq)iodioq} Wc = RaIa2 = Ra(id2 + iq2)
Wi = Vo2 Rc
--- = vod2 + voq2 Rc
--- = ω L( diod + Ψa2) + L( qioq)2 Rc
---
η = P
P + Wc + Wi --- × 100 Table I. Parameters of the voltage equation.
Simbole Content Simbole Content
Lu, Lv, Lw Self inductance
of each phase Muv, Mvw, Mwu Mutual inductance la Leakage flux of
each phase Ψfu, Ψfv, Ψfw Linkage flux of each phase
La
Average of the inductance of each phase
θ(= ωt)
Lead angle of u phase on the d- axis
Las
Amplitude of inductance of each phase
Ψf
Maximum value of linkage flux of each phase ω Electric angular
velocity
Fig. 1. (Color online) d-q axis equivalent circuit of IPMSM.
계산할 수 있다.
(11)
여기서, m은 상수이다.
2. 유한요소 해석을 이용한 회로정수 산정 및 손실해석 IPMSM의 특성해석을 위해서 d-q축 등가회로 모델링이 필 요하다. d-q축 등가회로 모델링을 완성하기 위해서는 기본적 인 전동기 파라메타 즉 무부하유기전압, 상저항, d-q축 인덕 턴스 및 등가철손저항이 필요하다. 일반적으로 d-q축 인덕턴 스 산정을 위해서 전기자 권선에 쇄교하는 자속을 이용한 방 법이 사용되고 있다. 이 방법은 고정자 권선에 무부하시 쇄 교자속과 부하전류가 흐를 때 쇄교자속의 위상차를 이용하여 구하는 방법이다. Fig. 2는 부하시와 무부하시 한상의 유기전 압파형을 비교하여 나타내었다. 이때 두 유기전압파형의 위상 차를 나타내는 α를 이용하여 d-q축 인덕턴스를 계산할 수 있 다[3].
Rc = m(Vu − iuRu)2 Pcore ---
Fig. 2. (Color online) Distribution of Induced voltage in IPMSM.
Fig. 3. (Color online) Analysis process of the core loss by using the finite element method.
d-q축 전류와 전동기 입력전류 Ia와의 관계식은 다음과 같다.
(12) 여기서 이고, Ie는 상전류의 실효치이다.
고정자 권선의 유기전압으로부터 쇄교자속의 기본파 성분 의 실효치는 다음 식과 같이 구할 수 있다.
(13) 여기서 Vo는 부하시 유기전압 기본파 성분의 실효치, Va는 무 부하시 유기전압 기본파 성분의 실효치, f 는 회전주파수를 각 각 나타낸다.
위 관계로부터 d-q축 상의 기본파 성분의 쇄교자속 실효치 는 다음 식과 같이 구할 수 있다.
(14) (15) 따라서, 위 관계식으로부터 IPMSM의 d-q축 인덕턴스는 아래 식을 이용하여 계산할 수 계산할 수 있다.
(16)
(17)
식(11)을 이용하여 등가철손저항 Rc를 해석적인 방법으로 계 산하기 위해서는 무부하 철손을 유한요소법을 이용하여 계산 해야 한다. 유한요소법을 이용하여 전동기의 무부하 철손은 각 요소에서의 자속밀도 분포에 대하여 고조파 분석을 수행
id = − Iasinβ, iq = Iacosβ Ia = 3Ie
Ψo = Vo/2πf, Ψa = Va/2πf
Ψa = 3Ψa Ψo = 3Ψo
Ld = Ψocosα − Ψa id ---
Lq = Ψosinα iq ---
하여 각 고조파 성분에 따른 자속밀도를 산출하고, 각 주파 수 성분별 자속밀도의 크기를 바탕으로 주파수별 철손 데이 터를 이용하여 각 요소의 철손을 구한 후, 각 요소에서 구한 철손을 중첩하여 계산할 수 있다[3, 4]. Fig. 3에 유한요소법
Fig. 4. (Color online) Core loss datum of an electric steel.
Table II. Specification of the IPMSM.
DC Link
Voltage 310 [V] Maximum power
@4000 rpm 185 [W]
Rated torque 4.5 [kgf-cm] Main speed 1800 [rpm], 3600 [rpm]
Maximum
current 1 [A] Driving method Sinewave
Length 45~52 [mm] Operating
temperature 75 [oC]
Inner diameter
of the rotor 26.4 [mm]
Efficiency
@1800rpm, 3600rpm
90 [%] above Fig. 5. (Color online) Efficiency and voltage due to both the induced voltage and inductance.
을 이용하여 철손을 산정하는 과정을 나타내었으며, 이 계산 과정에서 Fig. 4에 나타낸, 전기강판의 주파수 및 자속밀도 변화에 따른 철손 데이터가 사용된다.
3. 압축기용 180 W급 IPMSM 초기설계
Table II에 설계 대상인 압축기용 180 W급 IPMSM의 주 요설계 사양을 나타내었다. 최대 속도 4000 rpm에서 출력 185 W를 만족해야 하며, 주 운전범위에서 효율은 90 % 이상 을 만족해야 한다.
압축기용 180 W급 IPMSM의 초기설계를 위해서, 먼저 요 구되는 출력을 만족 시키는 인덕턴스와 역기전력 범위를 결 정하였다. 이를 위해서 앞에서 설명한 d-q축 등가회로 모델링 을 이용하였다. 등가회로 인덕턴스와 무부하 역기전력에 따른 출력특성을 Fig. 5에 나타내었다.
1800 rpm에서는 역기전력이 높아질수록 효율이 높은 경향 을 가지며, 3600 rpm에서는 A영역에서 최대효율 지점이 나 타난다. 그리고 4000 rpm에서 단자 전압 결과로써 최대 속도 에서 전원사양을 만족할 것으로 판단된다. 두 속도영역에서 전반적으로 1800 rpm에서의 효율이 높게 나타나기 때문에 역 기전력과 인덕턴스의 범위는 3600 rpm에서 최대효율을 가지 도록 설정하였으며, Table III에 정리하여 나타내었다. 그리고 Table III에 나타낸 파라메타의 범위를 만족하는 초기설계를 도출하고 그 결과를 Table IV에 정리하여 나타내었다.
설계결과 무부하 선간역기전압은 4000 rpm에서 기본파 실 효값이 137.7 V로 앞서 설정한 파라미터 범위를 만족하였으 며, d축 인덕턴스는 20.8 mH로 유한요소해석을 통해서 파라
미터 설계 범위를 만족함을 확인하였다.
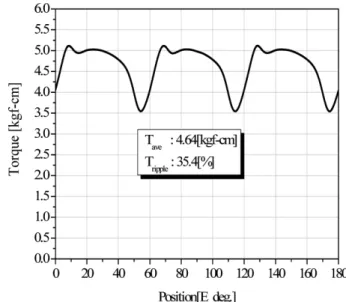
Fig. 6은 앞서 결정한 파라미터를 이용하여 d-q 등가회로 해석을 수행하고 이를 통해서 얻은 전류값과 전류 위상값을 이용하여 유한요소해석법을 이용하여 부하해석을 수행한 결 과를 나타낸다. 해석결과로부터 최대토크는 4.5 kgf-cm로써 목 표사양을 만족하였으나, 토크 리플이 35.4 %로 매우 높은 것 으로 분석되었다. 토크 리플은 전동기 운전 시 소음과 진동 을 발생시키는 원인으로 작용될 수 있으며 이를 저감하기 위 해서 최적설계를 수행하였으며, 다음절에 설명하였다.
III. 실험계획법 및 반응표면법을 이용한 토크 리플 저감설계
1. 실험계획법을 이용한 설계인자 도출
초기설계를 이용하여 IPMSM의 토크 리플을 저감하기 위 해 완전요인실험을 수행하였다[5, 6]. 설계인자는 초기설계시 검토한 사항과 설계자의 경험을 바탕으로 slot open(SO), chamfer(CH), flux barrier1(FB1), flux barrier2(FB2)로 선택 Table III. Range of the no-load backemf and inductance.
Range of the no-load backemf Range of the d-axis inductance
135~160 [V] 1~25 [mH]
Fig. 6. The distribution of the torque ripple.
Table IV. Results of the initial design.
Inner diameter of the stator 23.7 [mm]
Outer diameter of the rotor 21.2 [mm]
Effective angle the permanent magnet 62 [o] Br of the permanent magnet 1.23 [T]
Slot open 3.5 [mm]
Length of the motor 45 [mm]
Number of turn 196 [turns]
Fig. 7. (Color online) Design variables for full factorial design.
하였으며, Fig. 7과 Table V에 상세하게 나타내었다 Table V에 나타낸 설계인자 범위를 이용하여 완전요인 실험계획과 유한요소해석으로 17번의 실험(해석)을 수행하여 평균토크와 토크 리플을 구하고 그 결과를 분석하였다. Fig. 8은 토크 리 플과 평균토크에 영향을 미치는 인자에 대한 분석과 주 효과 에 대한 분석 결과를 나타내고 있다. Fig. 8로부터 설계변수
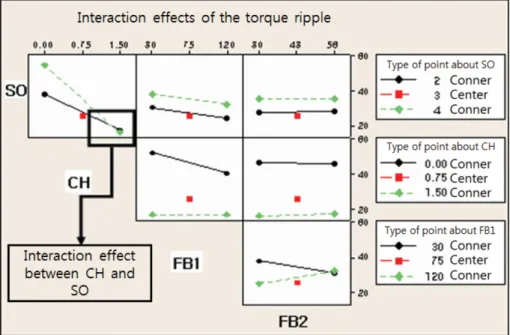
CH는 토크 리플과 평균토크에 영향을 주는 것으로 분석할 수 있었다. 또한 설계변수 FB1은 값이 커짐에 따라 토크 리플은 줄어들고 평균토크는 증가하는 것을 알 수 있으며, 설계변수 FB2는 토크 리플에 영향도가 작은 반면 평균토크에 영향을 미치는 것으로 각각 분석되었다. 다음으로 각 설계변수간의 상호 효과를 분석하였으며 그 결과는 Fig. 9에 나타내었다.
Table V. Range of design variables for full factorial design.
• Objective function : 5 [%] below of the torque ripple
• Constrained condition : 4.5 [kgf-cm] above of the torque
Design variables Range Design variables Range
A : Slot open (SO) 2~4 [mm] C : Flux barrier1 (FB1) 30~120 [o]
B : Chamfer (CH) 0~1.5 [mm] D : Flux barrier2 (FB2) 30~56 [o]
Fig. 8. (Color online) Main effect according to design variables.
Fig. 9. (Color online) Interaction effect of the torque ripple.
Fig. 9에서 설계변수 SO와 CH 사이의 교호작용이 있음을 알 수 있으며, 그에 따라서 토크 리플에 가장 큰 영향을 미 치는 CH 값의 범위를 결정하고 그에 따른 SO 값의 범위를 각각 결정하였다.
2. 반응표면법을 이용한 토크 리플 저감설계
앞서 실험계획법을 통한 분석결과를 바탕으로 설계변수 SO, CH 및 FB1을 토크 리플 저감을 위한 설계인자로 최종 결정 하였다. 설계변수 CH는 토크 리플이 최소가 되는 1.5를 중심 으로 1.2~1.8 mm로 하고 설계변수 SO는 설계변수 CH와의 교호작용을 고려하여 토크 리플이 낮은 3~4 mm로 범위를 결 정하였다. 설계변수 FB2는 토크 리플에 영향을 주지 않는 인 자로 분석되었기 때문에, 평균토크를 확보하기 위해 30°로 고 정하였다. 이와 같이 분석한 결과를 바탕으로 반응표면법을 실시하기 위한 각 설계변수들의 범위를 Table VI에 정리하여 나타내었으며, 반응표면법을 위한 실험계획 및 결과를 Table VII에 정리하여 나타내었다. Fig. 10은 설계변수 CH와 SO에 따른 평균토크 및 토크 리플에 대한 반응표면 결과를 등고선 형태로 나타낸 것이다. Fig. 10에 나타낸 반응표면을 통해서 요구사양인 토크값을 만족하면서 동시에 토크 리플이 최소가
되는 설계변수의 값을 찾을 수 있다. 이와 같이 반응표면법 을 이용하여 설계변수 값에 따른 토크값과 토크 리플을 검토 하여 토크 리플이 최소가 되는 설계변수 값을 찾을 수 있었 다. 결과적으로 설계변수 CH는 1.6 mm, 설계변수 SO는 3.3 mm, 그리고 FB1은 93.5o로 결정하였다. 이때, 토크 리플에 대한 근사값은 4.0 %이며 평균토크는 4.65 kgf-cm로 제약조 건을 만족하는 것으로 분석되었다. Fig. 11은 유한요소법을 Table VI. Range of design variables for response surface method.
• Objective function : 5 [%] below of the torque ripple
• Constrained condition : 4.5 [kgf-cm] above of the torque
Design variables Range Design variables Range
A : Slot open (SO) 3~4 [mm] C : Flux barrier1 (FB1) 75~120 [o]
B : Chamfer (CH) 1.2~1.8 [mm] D : Flux barrier2 (FB2) 30 [o]
Fixed value
Table VII. Results of the DOE for response surface method.
Content No.
SO [mm]
CH [mm]
FB1 [o]
Torque [Nm]
Torque ripple [%]
01 3 1.2 075 0.454 15.07
02 4 1.2 075 0.450 12.72
03 3 1.8 075 0.439 08.19
04 4 1.8 075 0.433 11.87
05 3 1.2 120 0.462 18.09
06 4 1.2 120 0.459 15.07
07 3 1.8 120 0.448 12.88
08 4 1.8 120 0.441 17.71
09 2.66 1.5 097.5 0.453 05.28 10 4.34 1.5 097.5 0.444 05.87 11 3.5 1.0 097.5 0.460 14.40 12 3.5 2.0 097.5 0.434 14.77 13 3.5 1.5 059.66 0.457 11.54
14 3.5 1.5 135.34 0.454 10.56
15 3.5 1.5 097.5 0.458 04.12 16 3.5 1.5 097.5 0.458 04.12
Fig. 10. (Color online) Contour plot of both the torque and the torque ripple.
이용하여 산정한 무부하역기전압, 인덕턴스 및 철손을 이용하 여 d-q축 등가회로 해석기법을 사용하여 해석한 전동기의 운 전특성을 나타낸다. 해석결과로부터 185 W의 요구 출력을 만 족 하면서 92 % 이상의 최대 효율을 확보할 수 있음을 확인 하였다. Fig. 12은 d-q축 등가회로 해석기법으로 획득한 전류 값과 전류위상을 이용하여 부하특성을 해석한 유한요소해석 결과이다. 입력전류값은 0.94 A, 그리고 전류위상은 6.4o로 해 석한 결과이며, 이때 평균토크는 4.72 kgf-cm가 되는 것을 확 인하였으며, Table VIII에 설계결과를 정리하여 나타내었다.
IV. 성능시험을 통한 설계검증
Fig. 13은 설계된 전동기의 제반성능을 시험하기 위한 다이 나모 장치를 나타내고 있다. 전동기의 효율측정 시험은 속도 범위와 토크범위를 조합하여 시행하였으며, 시험결과를 Table IX에 정리하여 나타내었다. 시험결과로부터, 속도 1800 rpm과
Fig. 13. (Color online) Bench testing set for the prototype IPMSM.
Table VIII. Design results for the torque ripple reduction.
DC link voltage 310 [V]
Maximum power 185 [W]
Maximum torque 4.5 [kgf-cm]
Maximum speed 4000 [rpm]
Outer diameter of the stator 117 [mm]
Outer diameter of the rotor 46 [mm]
Length of the motor 45 [mm]
Length of the air-gap 0.7 [mm]
Number of turn 196 [turns]
Resistance of the phase 0.86 [Ω]@20oC/1.03 [Ω]@75oC Br of the permanent magnet 1.3 [T]@20oC (N42SH) Efficiency@1800 rpm 92.31 [%]
Efficiency@3600 rpm 92.44 [%]
Fig. 12. (Color online) Analysis result of the torque distribution.
Fig. 11. (Color online) Results of the d-q axis equivalent circuit analysis.
Table IX. Experimental results of the efficiency for the prototype IPMSM.
Speed [rpm] Prototype 1 Prototype 2 Average efficiency [%]
0600 89.34 89.63 89.23
1800 90.67 89.73 90.87
2400 91.18 89.48 91.14
3600 91.82 88.83 91.29
4000 91.45 88.83 90.10
Fig. 14. Experimental results of both the current and the voltage @ 4.5 kgf-cm, 3600 rpm.
3600 rpm의 평균효율이 각각 90.87 %, 91.29 %로 목표효율을 만족함을 확인할 수 있었다. 효율 측정시 4.5 kgf-cm 부하에 서 3600 rpm에서의 전류와 전압파형을 Fig. 14에 나타내었다.
또한, 특성해석결과의 타당성을 검정하기 위해서 특성해석결 과와 측정결과를 비교하여 Table X에 나타내었다. 비교 대상 을 간단히 하기 위해서 전류 위상을 모두 0o으로 하여 비교 하였다. 특성해석값과 측정값의 오차는 속도 1800 rpm에서 0.6 %, 그리고 속도 3600 rpm에서 0.09 %로 비교적 오차가 작은 수준으로 분석되었으며, d-q축 특성해석과 결과에 대한 타당성을 검증할 수 있었다.
V. 결 론
본 논문은 d-q축 등가회로 모델링을 이용하여 압축기용 180 W급 IPMSM 설계와 특성해석을 수행하고 실험을 통해 서 설계 및 해석방법의 타당성을 검증하였다. 초기설계 단계 에서는 d-q축 등가회로 해석기법과 출력사양을 만족하는 전 동기 파라메미터 범위를 우선적으로 선정하여 이를 만족하도 록 초기설계를 도출하였다. 그리고 요구출력을 만족함과 동시 에 토크 리플을 저감하기 위해서, 실험계획법과 반응표면법을 이용하여 체계적으로 설계변수를 선정하여 토크 리플을 저감
설계를 완료하고 결과를 제시하였다.
감사의 글
본 연구는 2016년도 오산대학교 교내 학술 연구지원비에 의하여 수행되었습니다.
References
[1] D. Woo, I. Kim, and H. Jung, KIEE Trans. JEET 7, 530 (2012).
[2] J. Y. Lee, S. H. Lee, G. H. Lee, J. P. Hong, and J. Hur, IEEE Trans. Magn. 42, 1303 (2006).
[3] T. M. Jahns and N. Bianchi, DESIGN, ANALYSIS, AND CONTROL OF INTERIOR PM SYNCHRONOUS MACHINES, Tutorial course notes presented at the IEEE Industry Applications Society Annual Meeting (2004).
[4] J. J. Lee, Y. K. Kim, K. H. Ha, J. P. Hong, and D. H. Hwang, IEEE Trans. Magn. 40, 762 (2004).
[5] R. H. Myers, Response Surface Methodology, John Wiley &
Sons (1995).
[6] D. C. Mongomery, DESIGN AND ANALYSIS OF EXPERI- MENTS, John Wiley & Sons (2001).
Table X. Comparison experimental results and analysis results.
Results
Error
Analysis Experiment
Speed [rpm] Current [A] Voltage [V] Pout [W] Eff. [%] Eff. [%] Eff. [%] Loss [W]
1800 0.956 054.53 083.13 91.47 90.87 0.60 0.50
3600 0.966 107.61 166.25 91.38 91.29 0.09 0.15