임상병리검사를 위한 모바일 에이전트 기반의 바이오로봇 시스템 개발
Development of BioRobot System Based on Mobile Agent for Clinical Laboratory
최 병 준1, 진 성 문1, 신 승 훈1, 구 자 춘1, 김 민 철2, 김 진 현3, 손 웅 희4, 안 기 탁5, 정 완 균6, 최 혁 렬†
Choi Byung June1, Jin Sung Moon1, Sin Seung Hun1, Koo Ja Choon1, Kim Min Chul2, Kim Jinhyun3, Son Woong Hee4, Ahn Ki Tak5,
Chung Wan Kyun6, Choi Hyouk Ryeol†
Abstract Recently, robotic automation in clinical laboratory becomes of keen interest as a fusion of bio and robotic technology. In this paper, we present a new robotic platform for clinical tests suitable for small or medium sized laboratories using mobile robots. The mobile robot called Mobile Agent is designed as transfer system of blood samples, reagents, microplates, and any instruments. Also, the developed mobile agent can perform diverse tests simultaneously based on its cooperative and distributed ability. The driving circuits for the mobile agent are embedded in the robot, and each mobile agent communicates with other agents by using Bluetooth communication. The RFID system is used to recognize patient information. Also, the magnetic hall sensor is embedded to remove and compensate the cumulated error of locomotion at the bottom of mobile agent. The proposed mobile agent can be easily used for various applications because it is designed to be compatible with general software development tools. The Mobile agents are manufactured, and feasibility of the robot and localization of the agents using magnetic hall sensor are validated by preliminary experiments.
Keywords :Clinical Test, Laboratory Automation, Small-sized Mobile Agent, Modularization, Magnetic Hall Sensor
1. 서 론
최근 대부분의 임상병리검사 작업은 자동화 기기로 대 체되고 있으며, 특히 임상병리검사 기기분야에서 로봇 자 동화 시스템 시장은 빠른 속도로 성장하고 있다. 일반적 으로 대형 병원에서 많이 사용되는 검사장비인 TLA
(Total Laboratory Automation) 시스템의 경우, 컨베이어 방 식을 사용하여 많은 샘플들을 빠른 속도로 처리할 수 있 도록 최적화되어 있다. 그러나 컨베이어 방식은 그 부피 가 크고 고가여서 중소병원에서는 시스템을 갖추기가 어 렵다. 앞으로의 진단 기기 발전 방향인 환자를 위한 주문 형 의료 진단검사를 실현하기 위해서는 유연성을 가진 새로운 개념의 진단검사 시스템이 요구된다[1-4]. 이러한 요구를 충족하며 새로운 방식의 이송시스템을 제안하기 위하여 본 연구에서는 개미의 협동, 분산 작업과 같은 행 동을 모방하여 임상병리 검사를 위한 소형의 이동형 로 봇들이 다양한 작업을 수행할 수 있는 새로운 개념의 이 송시스템을 설명하고자 한다.
작은 크기의 다개체 이동형 로봇에 관한 연구는 다양 한 분야의 적용을 목적으로 진행되어왔다[5-23]. Mondada
※ 본 연구는 산업자원부 차세대 신기술 기술개발 사업 (10024715- 2005-11)인 “바이오기술을 응용한 진단검사용 지능형로봇 기술개발” 과제의 지원을 받아 수행되었음.
† 교신저자:성균관대학교 기계공학부 교수 (E-mail : [email protected])
1 성균관대학교 기계공학부 (E-mail : [email protected])
2 ㈜로보터스 (E-mail : [email protected])
3 서울산업대학교 기계공학부 (E-mail : [email protected])
4 한국생산기술연구원 로봇기술본부 (E-mail : [email protected])
5 포항지능로봇연구소 (E-mail : [email protected])
6 포항공과대학교 기계공학부(E-mail : [email protected])
그림 1. 진단검사를 위한 모바일 에이전트 시스템 개념도
는 소형 모바일 로봇인 Khepera 를 개발하여 다양한 제어 알고리즘 이론을 실제로 적용하였다[6-10]. Siegwart 는 Alice 라고 불리는 수 센티미터 크기의 로봇을 발표하였다.
Alice 는 이송 및 센서를 통한 인식, 그리고 근처의 로봇 과의 근접통신이 가능하고, 또한 원격으로 명령어를 보낼 수 있다. 확장 모듈을 이용하여 다양한 기능을 가질 수 있도록 설계되었다[15-16]. Dorigo 는 군집 지능에 기반하여 SWARM-BOT 이라고 불리는 자율주행 로봇을 개발하였 고 S-bot 이라는 단일 로봇 여러 대가 결합되어 SWARM- BOT 을 구성하며 환경 및 작업에 따라 로봇 간의 배치를 변화시킬 수 있다[18-19]. 지금까지 다개체 로봇 시스템분야 는 많은 연구자에 의해 연구되어 왔다. 하지만 이러한 다 개체 로봇 시스템 분야를 실생활에 적용하기에는 알고리 즘뿐만 아니라 하드웨어 영역에서도 많은 한계점을 가지 고 있다.
본 논문에서는 진단검사를 위한 시스템으로써 여러 대 의 모바일 로봇을 이용한 바이오로봇 시스템을 제안한다.
본 논문에서 모바일 에이전트라 불리는 모바일 로봇은 앞서 설명한 다개체 소형 로봇들과 달리 연구 개발을 목 적으로 한 것이 아니라, 실생활에 적용을 목적으로 한 의 료용 진단검사 시스템을 위하여 설계되었다. 기본적으로 모바일 에이전트는 진단검사에 사용될 마이크로플레이트 를 이송하는 능력을 가진다. 또한, 개발된 모바일 에이전 트는 협동 및 분산처리에 기반한 다양한 검사를 동시에 수행할 수 있다. 모바일 에이전트는 검사량에 따라 처리 능력을 제어하고, 필요한 검사에 따라 알맞은 과정을 통 합함으로써 이송거리와 처리시간을 단축시킬 수 있다.
2 장에서는 임상병리 검사를 위한 새로운 이송시스템 으로 모바일 에이전트 기반의 바이오로봇 시스템을 소개 하며, 모바일 에이전트 시스템의 장점을 설명하였다. 3 장 에서는 진단검사 모듈, 모바일 모듈, 스테이지 모듈로 구 성된 모바일 에이전트를 설명하고, 4 장에서 모바일 에이 전트의 제어 방법 및 위치 추정 알고리즘을 소개하고 있
다. 5 장에서는 3 대의 모바일 에이전트에 대한 구동 실험 및 성능 평가를 수행하였고, 마지막으로 6 장에서는 결론 과 향후 계획을 제시하였다.
2. 임상병리 검사를 위한 새로운 이송시스템 2.1 일반적인 진단검사 기기의 이송시스템
TLA 시스템을 사용한 진단검사의 일반적인 과정은 검 사에 대한 일정계획, 혈액 샘플(검체)과 시약의 적재, 검 체 인식, 검체와 시약의 분주, 이송, 인큐베이션 그리고 측정으로 구성된다. 위의 과정을 따르는 기존의 진단검사 기기의 이송시스템은 크게 두 가지 형태로 분류된다. 고 처리량에 최적화된 시스템은 대부분 컨베이어를 이용하 여 검체를 이송하는 방법을 채택하고 있고, 유연성과 다 양성에 최적화된 시스템은 대부분 로봇암을 이용하여 검 체를 이송하였다. 그러나 컨베이어를 이용한 기기는 유연 함에 대처하기가 힘들고, 로봇 암을 이용한 기기는 빠른 처리량에 대응하기가 어려운 실정이다.또한, 컨베이어나 로봇 암, 즉 이송 시스템에 문제가 생길 경우, 전체 시스 템을 멈추어야 하는 단점도 있다.
2.2 모바일 에이전트 기반의 바이오로봇 시스템
본 논문에서는 그림 1 과 같이 진단검사를 위한 새로운 이송시스템에 관한 개발과 실험을 수행하였다. 제안된 바 이오로봇 시스템의 기본 기능은 시약과 검체의 적재, 검체 식별, 검사에 대한 일정계획, 검체와 시약의 분주, 이송, 인 큐베이션, 측정이다. 처음으로 검체와 시약이 담겨있는 시 험관을 적재하고, RFID 시스템을 이용하여 검체를 식별한 다. 그리고 개발된 소프트웨어를 이용하여 사용자는 검사 에 대한 일정계획을 생성한다. 바이오로봇 시스템은 이 일 정계획에 의하여 작동하게 된다. 일정계획에 따라 검사가 시작되면 모바일 에이전트에는 마이크로플레이트가 장착 되고 분주시스템으로 이동하게 된다. 이 과정에서 모바일 에이전트는 마이크로플레이트를 고정하게 된다. 다음 과정 으로 자동분주시스템은 마이크로플레이트의 각 용기에 검 체와 시약을 분주한다. 이 과정을 마친 후 모바일 에이전 트는 마이크로플레이트를 인큐베이터로 이송한다. 이송된 후 인큐베이터 안에서 모바일 에이전트 상부 모듈에 장착 된 측광기에 의해 검사결과를 산출한다. 마지막 과정으로 모바일 에이전트는 초기위치로 돌아가게 된다. 모바일 에 이전트에 통합되어 있는 진단검사 모듈은 검사를 수행함 으로써 진단검사 과정을 단축할 수 있다. 진단검사 과정은 순차적인 과정에서 병렬 과정으로 바뀌게 된다. 또한 모바 일 에이전트가 검사 도중 고장이 나도 다른 에이전트로 대 체함으로써 전체 시스템에 영향을 미치지 않게 된다.
그림 2. 모바일 에이전트의 시스템 구성도
그림 3. 진단검사를 위한 모바일 에이전트
3. 모바일 에이전트의 설계
본 논문에서 제안하는 모바일 에이전트 시스템은 진단 검사를 위한 새로운 병리검사 시스템으로써의 기능을 만 족하며 중소형 병원에서 사용될 수 있도록 소형화, 모듈 화에 기반하여 설계되었다. 그림 2 는 제안된 바이오로봇 시스템의 모바일 에이전트의 시스템 구성도이다. 모바일 에이전트는 진단검사 모듈, 모바일 모듈, 스테이지 모듈 로 구성된다. 그림 3 은 개발된 모바일 에이전트를 보여 주고 있다.
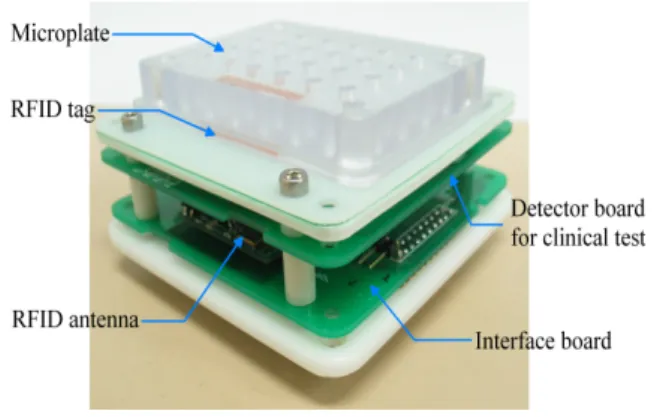
3.1 진단검사 모듈
모바일 에이전트의 진단검사 모듈은 환자 정보 인식, 혈액샘플의 검사등과 같은 다양한 임상병리 검사를 수행 하는데 사용된다. 제안된 진단검사 모듈은 마이크로플레 이트, RFID 태그와 리더기, 그리고 인터페이스 보드로 구 성된다. 그림 4 는 설계된 진단검사 모듈을 보여준다. 진 단검사 모듈의 크기는 39.5ⅹ23.5(mm)이다. 단일 마이크
그림 4. 진단검사 모듈
로플레이트에는 중소형 병원에서 사용하기에 알맞도록 100 ㎕ 용량을 갖는 24 개의 웰로 구성되었다. 마이크로플 레이트에 RFID 태그가 부착되어있고, 태그를 사용하여 환자의 정보를 인식하게 된다. RFID 안테나는 진단검사 모듈 속에 삽입되어 있어 마이크로플레이트가 진단검사 모듈에 장착되면, 태그를 읽어 저장된 환자의 정보를 사 용자에게 보여준다. 진단검사 모듈의 인터페이스 보드에 는 마이크로프로세서를 사용하여 모바일 모듈과 통신을 할 수 있도록 구성되었다. 또한 인터페이스 보드의 다른 포트를 사용하여 추가적인 기능과 장치를 쉽게 장착할 수 있다.
3.2 모바일 모듈
바이오로봇 시스템의 모바일 모듈은 스테이지 위를 이 동하고, 블루투스 통신을 이용하여 PC 와 통신하는 차동 구동 방식의 소형 모바일 로봇이다. 그림 5 에서와 같이 모바일 모듈은 원통형으로 지름 118mm 와 높이 90mm 를 가지고 있다. 각각 두 개의 17:4 기어비를 갖는 기어와 2W 급의 DC 모터를 사용하여 이동하며, 무게의 쏠림으 로 인하여 로봇이 기울어지는 현상을 막기 위하여 두 개 의 볼 캐스터를 사용하였다.
그림 5. 모바일 모듈
표 1. 모바일 모듈의 재원 크기
(반경 ⅹ 높이) [mm] 118 ⅹ 90
무게 [kg] 0.603
마이크로프로세서 TMS320F2811
구동기 2W 급 DC 모터 (17:4 기어비)
센서 엔코더, 마그네틱 홀 센서
전원 장치 7.4V, 1020mAh
리튬이온배터리
통신 블루투스 통신
모바일 에이전트는 최대 1m/s2 의 가속도와 1m/s 의 속 도로 주행할 수 있도록 설계되었고, 리튬-이온 배터리가 장착되었다. 마그네틱 홀 센서는 모바일 에이전트의 바닥 면에 부착되어 있어 이동할 때의 오차를 보정한다. 또한 모바일 모듈은 도킹시스템의 그리퍼를 이용하여 모바일 에이전트의 위치를 초기화시킬 수 있다. 모든 정보는 모 바일 에이전트와 PC 간의 블루투스 통신으로 전송된다.
모바일 모듈의 모든 제어는 DSP 마이크로프로세서가 담 당하고 있다.
3.3 스테이지 모듈
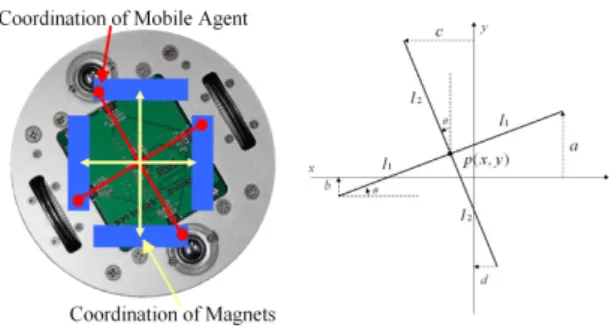
모바일 에이전트는 이동 시 여러 가지 이유로 누적 오 차가 발생하게 된다. 임상병리 검사를 위해서는 정확한 위치정보가 필요하기 때문에, 위치 오차는 시스템에서 반 드시 보정되어야 한다. 본 연구에서는 위치 오차를 보정 해 주기 위하여 그림 6 과 같이 스테이지에 영구자석을 설치하였다. 따라서, 모바일 에이전트가 스테이지 위를 이동 시 홀 효과를 이용한 오차 보정 알고리즘을 적용하 여 오차를 보정하여 정확히 목표 위치에 도달할 수 있다.
그림 6. 스테이지 모듈
그림 7. 도킹 모듈
스테이지는 그림 6 과 같이 총 12 개의 모듈로 구성되 어 있으며, 4 개의 영구자석이 각각의 스테이지 모듈의 중 앙에 설치되어 모바일 모듈의 바닥면에 부착되어 있는 마그네틱 홀 센서를 이용하여 자기장을 인식하게 된다.
모바일 에이전트가 영구자석을 지날 때, 마그네틱 홀 센 서는 자기장의 좌표와 모바일 에이전트의 좌표 사이의 오프셋을 측정한다. 마이크로프로세서에서 출력전압을 계산하여 PC 로 전송하고, 모바일 에이전트의 출력전압과 위치관계를 계산하여 사용자 인터페이스에 로봇의 위치 를 나타내게 된다.
바이오로봇 시스템에서 검체와 시약 분주 작업, 측정 등의 임상병리 검사를 수행하기 위해서 정확한 위치 제 어가 필요하다. 따라서, 앞서 설명한 방법 외에 그림 7 과 같이, 정확한 위치가 필요한 곳에 그리퍼를 설치하여 로 봇을 잡아 절대적이고 정밀한 위치를 보정해주는 방법을 병행하여 사용한다. 도킹 모듈에는 그리퍼가 장착되어 모 바일 에이전트가 초기위치로 이동될 때 모바일 에이전트 를 잡아 정확한 초기위치와 목표위치에 도달 시킨다.
그리퍼가 장착된 도킹 모듈은 DSP 마이크로프로세서 에 의하여 4 개의 모듈이 동시에 제어 된다. 그리퍼는 공 압 구동기가 사용되어 모터보다 부드럽게 작동한다. 도킹 모듈의 그리퍼에 달린 자동충전시스템은 모바일 에이전 트가 배터리 방전 시 자동으로 도킹하여 충전할 수 있도 록 설계되었다.
4. 모바일 에이전트의 위치 추정 및 제어 차동구동 방식인 모바일 에이전트는 주행 시 누적오차 가 발생하게 된다. 주행 오차의 발생 원인으로는 바퀴 제 작 공차, 양쪽 바퀴의 접촉점의 차이, 스테이지에 접촉할 때의 오차(미끄러짐, 표면의 비균질) 등의 환경인자부터 분해능까지 많은 이유가 존재한다[24]. 로봇이 초기 위치에 서 목표위치까지 이동함으로써, 위치 오차는 누적되게 되 고, 목표위치가 아닌 다른 위치에 이를 수 있다. 극단적 으로, 로봇은 누적 오차로 인해 스테이지 밖으로 떨어지 게 될 것이다. 그러므로 성공적인 임상병리 검사를 수행 하기 위하여 모바일 에이전트는 위치추정, 위치보정 및 제어 알고리즘이 필요하다. 따라서, 앞서 설명하였듯이 에이전트 바닥면에 마그네틱 홀 센서를 부착하였다. 마그 네틱 홀 센서는 스테이지 내 영구자석의 자기장을 통하 여 N 극과 S 극 사이의 중간 어느 지점인지를 파악하게 된다.
4.1 위치 추정 알고리즘
홀 효과는 자기장 속에서 도체나 반도체에 직류 전압
그림 8. 위치추정 알고리즘
을 인가하였을 때, 도체나 반도체 표면에 전자와 홀의 이 동이 발생하고, 이를 통해 전압의 변화를 측정할 수 있다 는 것이다. 그러나 영구 자석의 자기장을 홀 센서가 검출 하는데 있어서 그 특징이 선형적이지 않기 때문에 거리 를 검출하기 위해서는 센서 보정이 불가피하다. 따라서 홀 센서 보정은 홀 센서와 영구자석 사이의 거리가 고정 되어 있기 때문에 자석과의 수직거리에 대한 교정은 필 요하지 않으며, 수평위치에 의한 교정을 수행하면 거리에 따른 전압은 선형적으로 출력된다고 가정할 수 있다.
모바일 에이전트가 홀 센서 위에 놓이면 그림 8 과 같 이 모바일 에이전트 좌표와 자석 좌표의 위치 차이를 측 정한다. x, y, θ 의 출력 값은 다음 식으로 표현된다.
1 1
1
sin ( )
2 2
a b a b
x l b l b b
θ −l −
= + = × + = + (1)
2 2
2
sin ( )
2 2
c d c d
y l d l d d
θ −l −
= + = × + = + (2)
1 1
sin ( )
2
, 0 , 0
, 0 , 0
a b l
if a b then
else if a b then θ
θ θ
− −
=
− > >
− < <
(3)
1 1
sin ( )
2
, 0 , 0
, 0 , 0
c d l
if c d then
else if c d then
θ
θ θ
− −
=
− > >
− < <
(4)
스테이지에서 a, b, c, d 는 영구자석의 좌표와 에이전트 좌표 사이의 차이이다. x, y 는 목표도달 위치와 오차 위치 사이의 거리를 나타낸다. 또한, θ 는 에이전트의 목표 도 달 기준 좌표와 실제좌표의 각도 차이를 나타낸다. 따라 서 모바일 에이전트가 목표 지점에 도착하였을 때, 실제 위치와 도달 위치 사이의 오차값이 측정되고, 다음의 이 동 목표 위치의 좌표를 수정하게 된다.
4.2 제어 및 모니터링 소프트웨어
여러 대의 모바일 에이전트와 그리퍼를 효과적으로 제 어하기 위하여 그림 9 의 소프트웨어를 프로그램 하였다.
제작된 소프트웨어는 여러 모바일 에이전트의 이동 경로 설정 및 상태를 모니터링 할 수 있으며, 설정된 모든 정 보를 저장, 복원할 수 있다. 또한 진단검사 모듈의 마이 크로플레이트 RFID 태그 정보를 읽을 수 있을 뿐만 아니 라 검사과정에서 마이크로플레이트가 제거되었음을 알기 위해 매 200ms 마다 RFID 태그를 검색한다. 블루투스 중 계기를 통하여 TCP/IP 통신을 이용함으로써 여러 대의 모바일 모듈을 동시에 제어할 수 있다. 그림 10 과 식 (5) 와 같이 각각의 모바일 에이전트는 현재위치와 다음 목 표위치에 대한 거리 및 각도에 대한 정보를 블루투스 통 신을 사용하여 전송한다. 모바일 에이전트는 이동 경로 상에서 목표 지점에 도착 시 오차를 측정하여 다음 목표 지점으로 이동하기 위한 거리와 각도를 수정한다.
1 1
1 1
2 2
1 1 1
tan ( ) ( 1, 2, 3, ..., )
( ) ( )
n n
n n g
n n
n n n n n
y y
n n
x x
d x x y y
θ + − + θ
+
+ + +
= −− − =
= − + −
(5)
그림 9. 제어 및 모니터링 소프트웨어
그림 10. 모바일 에이전트의 경로 생성
그림 11. 모바일 에이전트의 실험
5. 실 험
이 장에서는 모바일 에이전트 시스템의 진단검사 모듈 에서 마이크로플레이트의 인식, 모바일 에이전트의 위치 추정, 실제의 진단검사의 성능에 대하여 실험을 수행하였 다. 진단검사 모듈에 마이크로플레이트를 적재 시 RFID 시스템을 통해 사용자 정보가 확인되고, 블루투스 통신을
그림 12. y-축 누적 오차
그림 13. x-축 누적 오차
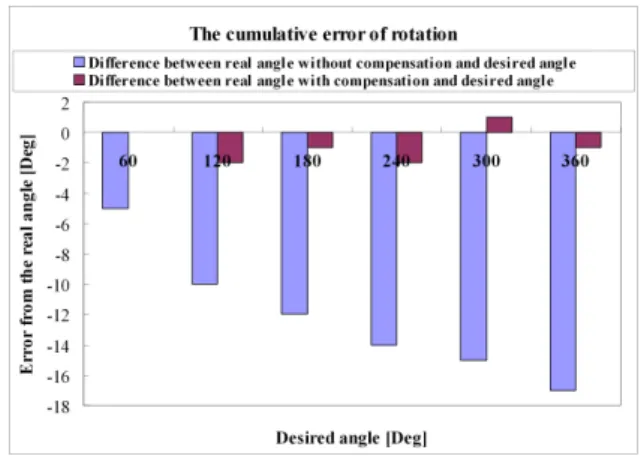
그림 14. 회전 누적 오차
이용하여 매 200ms 마다 마이크로플레이트의 정보를 데 이터화하여 전송한다. 이 데이터는 PC 로 전송되어 사용 자는 마이크로플레이트의 유효성, 삽입 상태, 제거 상태 등을 알 수 있다. 실험에서는 3 개의 마이크로플레이트를 사용하여 이들을 바꾸어 장착한 결과 최대 600ms 내에 모든 마이크로플레이트의 상태를 정상적으로 인식할 수 있었다.
모바일 에이전트는 바퀴의 직경 공차, 두바퀴의 비정 렬, 미끄러짐, 표면의 상태등 때문에 주행 오차가 발생한 다. 더 큰 문제는 이 오차가 계속적으로 누적되어 목표위 치에 도달하지 못한다는 것이다.
따라서 위치오차를 제거하기 위하여, 모바일 에이전트 는 스테이지에 설치된 영구자석을 이용하여 오차를 보정 하였다. 실험에서 레이저 포인터는 모바일 에이전트의 초 기위치에서부터 도달위치 동안의 경로를 표시하기 위하
그림 15. 모바일 에이전트의 이동 실험
여 모바일 에이전트의 진행 방향 후면에 부착되었다.
레이저 포인터가 부착된 로봇은 계획된 궤적을 따라 움직인다. 300mm 에서 1500mm 사이의 이동거리를 갖는 궤적에서 80 회 정도 반복적으로 실험하여 그림 12 와 그 림 13 의 그래프에 x 축과 y 축에 대한 오차를 나타내었다.
또한 그림 14 는 회전에 대한 오차 값인 θ 에 대하여 나 타내었다. 그림 12, 13, 14 에서는 영구자석을 이용한 위치 보정 알고리즘이 적용된 위치오차와 적용되지 않은 위치 오차에 대한 결과를 비교한다. 실험 결과에서 위치오차는 위치정보에 대한 보정이 없다면 계속적으로 누적되는 것 을 보여주었고, 홀 센서를 이용한 위치추정과 위치보정은 누적되는 오차에 대하여 효율적이라는 것을 보여준다. 또 한, 도킹모듈의 그리퍼가 모바일 에이전트를 잡음으로써, 정확한 초기위치 상태로 위치보정을 해준다.
마지막으로, 3 대의 모바일 에이전트가 초기위치에서 출발하여 가상의 임상병리 검사들을 수행할 수 있도록 시스템을 구성하였다. 실험에서 모바일 에이전트는 목표 위치에 정확히 이동하였고, 그림 15 에 나타난 것과 같이 여러 대의 로봇이 동시에 작업을 수행할 수 있었다.
6. 결 론
본 논문에서는 모바일 에이전트라 불리는 소형화된 다 개체 모바일 로봇을 개발하였다. 모바일 에이전트 시스템 은 진단검사를 위하여 다양한 검사 모듈이 통합되어 있 고, 여러 대의 로봇이 동시에 검사 및 이송을 할 수 있도 록 설계되었다. 자기 홀 센서는 모바일 에이전트의 이동 시 위치보정과 오차 제거를 위해 부착되었다. 모바일 에 이전트를 사용한 바이오로봇 시스템은 검사모듈, 모바일 모듈, 스테이지 모듈, 자동충전 시스템으로 구성 되어있 고 실험적으로 이 연구의 타당성을 검증하였다.
향후 연구로써, 자율 주행을 위하여 적외선 센서와 자 이로 센서를 부착할 예정이다. 또한 측광기와 같은 다양 한 진단검사 장비를 추가할 예정이다. 최종적으로 바이오 로봇 시스템을 구축하여 진단검사 분야에 실제 적용할 것이다.
[1] J. W. Holman, T. E. Mifflin, R. A. Felder, L. M.
Demers, “Evaluation of an Automated Preanalytical Robotic Workstation at Two Academic Health Centers”, Clinical Chemistry, vol. 48, no. 3, pp. 540- 548, 2002.
[2] S. Graves, B. Holman, R. A. Felder, “Modular
Robotic Workcell for Coagulation Analysis”, Clinical Chemistry, vol. 45, no. 5, pp. 772-777, 2000.
[3] J. Boyd, “Robotic Laboratory Automation”, Science, Washington, D.C., vol. 295m, pp. 517-518, 2002.
[4] B. J. Choi, K. H. Noh, J. W. Kim, S. M. Jin, J. C. Koo, S. M. Ryew, J. H. Kim, W. H. Son, K. T. Ahn, W. K.
Chung and H. R. Choi, “Intelligent BioRobot Platform for Integrated Clinical Test”, SICE-ICASE International Joint Conference, pp. 5828-5832, 2006.
[5] R. A. Brooks, “A Robust Layered Control System for a Mobile Robot”, IEEE Journal of Robotics and Automation, vol. RA-2, no. 1, pp. 14-23, 1986.
[6] M. Dorigo, “Special Issue on Learning Autonomous Robots”, IEEE Transactions on Systems, Man and Cybernetics-Part B, vol. 26, pp. 361-364, 1993.
[7] D. Floreano and F. Mondada, “Automatic Creation of an Autonomous Agent: Genetic Evolution of a Neural- Network Driven Robot”, From Animals to Animates III: Proceedings of the Third International Conference on Simulation of Adaptive Behavior, MIT Press- Bradford Books, Cambridfe, MA, pp. 402-410, 1994.
[8] F. Mondada, E. Franzi, and P. Ienne, “Mobile Robot Miniaturization: A Tool for Investigation in Control Algorithm”, Proceedings of the Third International Symposium on Experimental Robotics, Springer Verlag, pp. 501-513, 1993.
[9] M. J. B. Krieger, J. B. Billeter, L. Keller, “Ant-like task allocation and recruitment in co-operative robots”, Nature, vol. 406, pp. 992-995, 2000.
[10] U. Grosseschallau, U. Ruckert, “Low-cost Bluetooth Communication for the Autonomous Mobile Minirobot:
Khepera”, Proceedings of IEEE International Conference on Robotics and Automation, pp. 4194-4199, 2005.
[11] D. J. Stilwell and J. S. Bay, “Toward the Development of a Material Transport System using Swarms of Ant- like Robots”, Proceedings of International Conference on Robotics and Automation, pp. 756-761, 1993.
[12] N. Miyata, J. Ota, T. Arai, E. Yoshida, D. Kurabayashi, J. Sasaki, and Y. Aiyama, “Cooperative transport with regrasping of torque-limited mobile robots”, Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 304-309, 1996.
[13] N. Miyata, J. Ota, T. Arai, and H. Asama, “Cooperative Transport by Multiple Mobile Robots in Unknown Static Environments Associated with Real-Time Task Assignment”, IEEE Transactions on Robotics and Automation, vol. 18, issue 5, pp 769-780, 2002.
[14] T. Fukuda, I. Takagawa, Y. Hasegawa, “From Intelligent Robot to Multiagent robotic sys-tem”,
Proceedings of International Conference on Integration of Knowledge Intensive Multi-Agent Systems, pp.413-417, 2003.
[15] G. Caprari and R. Siegwart, “Design and Control of the Mobile Micro Robot Alice”, Proceedings of the 2nd International Symposium on Autonomous Minirobots for Research and Edutainment, pp. 23-32, 2003.
[16] G. Caprari, and R. Siegwart, “Mobile micro-robots ready to use: Alice”, Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3295-3300, 2005.
[17] F. Sahin, “Groundscouts: architecture for a modular micro robotic platform for swarm intelligence and cooperative robotics”, Proceedings of IEEE International Conference on Systems, Man and Cybernetics, pp. 929-934, 2004.
[18] F. Mondada, A. Guignard, M. Bonani, D. Bar, M.
Lauria, D. Floreano, “SWARM-BOT: From Concept to Implementation”, Proceedings of IEEE/RSJ International Conference on Intelligent Robot and Systems, IEEE Press, Piscataway, NJ, USA, IEEE Press, Piscataway, NJ, USA, pp. 1626-1631, 2003.
[19] R. Gro, M. Bonani, F. Mondada, M. Dorigo,
“Autonomous Self-Assembly in Swarm-Bots”, IEEE Transactions on Robotics, vol. 22, no. 6, pp. 1115- 1130, 2006.
[20] R. Casanova, A. Saiz, J. Lacort, J. Brufau, A. Arbat, A.
Dieguez, P. Miribel, M. Puig-Vidal, J. Samitier,
“Towards Co-operative Autono-mous 1cm3 Robots for Micro and Nano-manipulation Applications:
MICRON”, Proceeding of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.
789-794, 2005.
[21] J. McLurkin and J. Smith, “Distributed Algorithms for Dispersion in Indoor Environments using a Swarm of Autonomous Mobile Robots”, In Proceedings of Distributed Autonomous Robotic Systems Conference, 2004.
[22] J. Pugh, A. Martinoli, “Relative Localization and Communication Module for Small-scale Multi-robot Systems”, Proceedings of IEEE International Conference on Robotics and Automation, pp. 188-193, 2006.
[23] I. D. Kelly, and A. Martinoli, A Scalable, “On-Board Localisation and Communication System for Indoor
Multi-Robot Experiments”, Special Issue on Sensor Simulation and Smart Sensors; Sensor Review, vol.24, no. 2, pp. 167-180, 2004.
[24] R. Siegwart and I. R. Nourbakhsh, Introduction to Autonomous Mobile Robots, MIT Press, Cambridge, Massachusetts, 2004.
최 병 준 2003 성균관대학교 기계공학
부(공학사)
2005 성균관대학교 기계공학 부(공학석사)
2005~현재 성균관대학교 기계설계학과 박사과정 관심분야 : Multi-robot system, Cooperation, SWARM, Path
planning & Task allocation algorithm
진 성 문 2006 성균관대학교 기계공학
부(공학사)
2003~현재 성균관대학교 메 카트로닉스협동과정 석 사과정
관심분야 : Multi-robot system
신 승 훈 2006 성균관대학교 기계공학
부(공학사)
2003~현재 성균관대학교 기 계공학부 석사과정
관심분야 : BioRobot system, Sensor & Actuator
정 완 균 1981 서울대학교 기계설계학
과(공학사)
1983 한국과학기술원 기계공 학과(공학석사) 1987 한국과학기술원 로봇공
학(공학박사) 1987~1993 포항공과대학교 기계공학과 조교수 1988 CMU 방문 교수
1995 U. C. Berkeley visiting scholar
1993~2000 포항공과대학교 기계공학과 부교수 1987~현재 포항공과대학교 기계공학과 교수 관심분야 : SLAM, Navigation, Underwater robots, Robust
controller
안 기 탁 1992 포항공과대학교 기계공
학과(공학사)
2003 포항공과대학교 기계공 학(공학석사)
1992~1999 POSCO 설비기술 부 기술원
2006~현재 포항지능로봇연구소 선임연구원 관심분야 : Robust Controller, Path Planning
손 웅 희 1988 서울산업대학교 기계설
계학과(공학사) 1993 한양대학교 기계설계학
과(공학석사)
1997 과학기술부 기계/ 차량 기술사
1987~1990 한국과학기술원 기계공학과 연구원 1990~현재 한국생산기술연군원 로봇기술 본부 팀장/
수석연구원
관심분야 : Field Robotics, Biomimetics, Transportation Mechanism
김 진 현 1998 포항공과대학교 기계공
학과(공학사)
2000 포항공과대학교 기계공 학과(공학석사) 2005 포항공과대학교 기계공
학과(공학박사)
2005~2007 한국생산기술연구원 로봇기술본부 선임연 구원
2007~현재 서울산업대학교 기계공학과 조교수 관심분야 : Redundant Manipulator, Underwater robots,
Hovering robots, Neuro Robotics 김 민 철 1992 포항공과대학교 기계공
학과(공학사)
1994 포항공과대학교 기계공 학과(공학석사) 2000 포항공과대학교 기계공
학과(공학박사) 2000~현재 (주)로보터스 부설연구소 연구소장 관심분야 : Service robot, H/W architecture
구 자 춘 1989 한양대학교 기계공학과
(공학사)
1992 University of Texas at Austin, Mechanical Engineering(공학석사) 1997 University of Texas at Austin, Mechanical
Engineering(공학박사)
1997~1999 삼성 Information Systems America Staff Engineer
1999~2001 IBM Storage Systems Division Advisory Engineer
2001~현재 성균관대학교 교수
관심분야 : Modeling and simulation of physical systems, Precision Mechatronic System, Computational mechanics, Sensors & Actuators
최 혁 렬 1984 서울대학교 기계공학과
(공학사)
1986 한국과학기술원 기계공 학과(공학석사) 1994 포항공과대학교 기계공
학과(공학박사) 1986~1989 LG 전자 정보기술 연구소 주임연구원 1993~1995 일본정부 문부성 초청 동경대학 연구원 1999~2000 일본 AIST 초빙 연구원
1995~현재 성균관대학교 기계공학부 교수
2005~현재 IEEE Transaction onRobotic Associate Editor 현재 성균관대학교 기계공학부 교수
관심분야 : Field Robotics, Dexterous hand, Haptic display, Artificial muscle actuator
![그림 1. 진단검사를 위한 모바일 에이전트 시스템 개념도 는 소형 모바일 로봇인 Khepera 를 개발하여 다양한 제어 알고리즘 이론을 실제로 적용하였다 [6-10]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5338014.393461/2.892.98.427.150.339/진단검사를-모바일-에이전트-시스템-개념도-개발하여-알고리즘-적용하였다.webp)
![표 1. 모바일 모듈의 재원 크기 (반경 ⅹ 높이) [mm] 118 ⅹ 90 무게 [kg] 0.603 마이크로프로세서 TMS320F2811 구동기 2W 급 DC 모터 (17:4 기어비) 센서 엔코더, 마그네틱 홀 센서 전원 장치 7.4V, 1020mAh 리튬이온배터리 통신 블루투스 통신 모바일 에이전트는 최대 1m/s2 의 가속도와 1m/s 의 속 도로 주행할 수 있도록 설계되었고, 리튬-이온](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5338014.393461/4.892.98.428.150.345/모바일-마이크로프로세서-마그네틱-리튬이온배터리-블루투스-에이전트는-가속도와-설계되었고.webp)