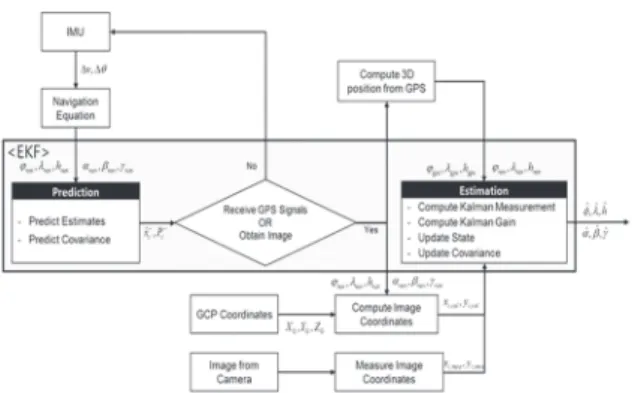
Analysis of Factors Affecting Performance of Integrated INS/SPR Positioning during GPS Signal Blockage
8
0
0
전체 글
(2)
수치


관련 문서
이를 위해 이종재 AI5083과 SGAFC1180의 SPR 단독공정과 Adhesive를 병행한 Hybrid 접합부의 인장 전단강도를 비교하고자 하였으며 아울러 피로수명 평가를
– General controls with Special controls AND Premarket Approval (PMA) – PMA approval requires the safety and effectiveness of the
6.1.3.1 Satellite Infrastructures 6.1.3.2 Cellular Infrastructures 6.1.3.3 Indoor Infrastructures.. 6.2
_____ culture appears to be attractive (도시의) to the
• Analysis: A band-limited signal of finite energy that has no frequency components higher than W herts is completely described by specifying the values of the signal at
It considers the energy use of the different components that are involved in the distribution and viewing of video content: data centres and content delivery networks
After first field tests, we expect electric passenger drones or eVTOL aircraft (short for electric vertical take-off and landing) to start providing commercial mobility
1 John Owen, Justification by Faith Alone, in The Works of John Owen, ed. John Bolt, trans. Scott Clark, "Do This and Live: Christ's Active Obedience as the
