Journal of Institute of Control, Robotics and Systems (2016) 22(11):888-894
http://dx.doi.org/10.5302/J.ICROS.2016.16.0161 ISSN:1976-5622 eISSN:2233-4335
재난 탐사 및 구조를 위한 로봇팔 설계 및 제어
Design and Control of Robot Arm for Inspection and Rescue Operations
강 진 일, 최 형 식*, 전 봉 환, 지 대 형, 오 지 윤, 김 준 영
(Jin-Il Kang1, Hyeung-Sik Choi2,*, Bong-Huan Jun3, Dae-Hyeong Ji2, Ji-Yoon Oh2, and Joon-Young Kim2)
1Ocean Science and Technology School, KIOST-KMOU
2Department of Mechanical Engineering, Korea Maritime and Ocean University
3Korea Research Institute of Ship and Ocean Engineering
Abstract: This paper presents the kinematic and dynamic analysis of the robot arm for inspection and rescue operations. The inspection robot arm has Pitch–Pitch–Pitch–Yaw motion for an optimal and stable view of the camera installed at the end of the manipulator. The rescue operation robot arm has Yaw–Pitch–Pitch–Roll motion to handle heavy tools. Additionally, both robot arms are waterproof, as they use the triple-layer O-ring. Furthermore, the dynamic equation including the damping force due to the mechanical seal for waterproofness was derived by using the Newton–Euler method. A control system using the ARM processor was developed and introduced in this paper, and its performance was verified through experiments.
Keywords: inspection robot arm, rescue operation robot arm, waterproof, kinematics
I. 서론
화재, 홍수, 지진, 폭발물 테러 등과 같은 재난환경에서는 인체에 유해한 물질이나 2차 붕괴 위험이 뒤따르므로 인력 투입에 어려움이 있다. 따라서 이러한 인적 물적 피해를 최 소화 하기 위하여 극한환경에서 임무 수행이 가능한 로봇 연 구가 활발히 진행되고 있다. 1979년 펜실베니아주 Three Mile Island 원자력발전소에서 방사능 누출 사고가 발생하여 로봇 [1]을 투입하여 로봇의 극한 환경에서의 활용 가능성을 확인 한 이래로, iRobot사의 PackBot [2]은 처음 군사용으로 개발되 었으나 성능 개량을 거쳐 일본 후쿠시마 원전사고때 투입되 어 원전 내부 영상 획득에 사용되었다. 또한 Remotec사의 ANDROS [3,4]는 경찰이나 특공대에 보급되어 폭발물 제거와 같은 특수 임무를 수행하였다. 그리고 소방 방재 로봇으로 인명구조 및 수송이 가능한 RoboCue [5]와 같은 로봇이 개발 되었다. 그 외에도 다양한 험지 및 장애물 극복을 위하여 다 리와 궤도, 바퀴가 결합된 형태로 이동이 가능한 AZIMUT [6]가 연구되었고, 붕괴틈새와 같은 협소 구역 탐색을 위한 다관절형 로봇 SORYU [5]같은 뱀형 로봇등이 개발되었다.
이러한 재난 로봇에 사용된 로봇팔은 주행 플랫폼에 부착하 여 동작하므로 대체로 경량이며 자유도가 낮은 것이 특징이
다. 로봇팔을 사용하여 장애물을 극복하는 연구[7,10]가 수행 되었고, 안정된 카메라 화각을 얻기 위하여 로봇팔 구조에 대하여 연구[8]가 수행되었고, 로봇팔의 경량화를 위해 탄소 섬유를 이용한 로봇팔 연구[9]도 수행되었다. 또한 로봇팔의 모델링 불확실성 및 외란이 성능을 저하시키지 않도록 강인 한 제어기를 설계하는 연구[11]도 수행되었다.
본 연구에서는 임무 목적에 따라 탐사용 로봇팔과 구조 작 업용 로봇팔을 개발하였다. 탐사용 로봇팔은 화재나 홍수로 침수된 지역에서도 재난환경 조사가 가능한 탐사용 로봇에 부착되어 사용되는 목적으로 개발되었다. 따라서 각 구동부 는 수심 10m에서도 방수가 가능하도록 3중 수밀 방식을 적 용하였다. 또한 원격 조종을 위해 로봇팔 말단에 카메라를 설치하고 카메라의 동작반경을 극대화하기 위한 구조로 설 계되었다. 또한 조명을 설치하여 효과적으로 주변환경 정보 획득 및 생존자 탐색을 목적으로 설계하였다. 구조 작업용 로봇팔은 전방의 이동을 방해하는 장애물을 파쇄 또는 극복 하기 위한 목적으로 사용되는 작업용 로봇에 부착된다. 이를 위해 중량의 작업공구를 지지 가능하며 작업 높이와 공구의 진입 각도를 조작이 가능한 기구부로 구성되었다. 개발된 로 봇팔들의 공통적인 특징은 재난 환경을 고려하여 구동기의 모듈화 설계를 수행하여 유지보수가 쉽고 고장시 신속히 교 체가 가능하도록 설계되었다. 또 구동기의 케이블이나 센서 신호 케이블들을 내장하여 외부로부터 보호하도록 내장 설 계를 수행하였다.
본 논문의 구성은 다음과 같다. II장에서는 탐사용 로봇팔 과 구조작업용 로봇팔의 기구부 구성과 기구학 해석을 수 행하고 그에 따른 구동부 모터 용량을 산출하였다. III장에 서는 4축 탐사용 로봇팔의 동역학 해석을 수행하였고, IV장 은 로봇팔 제어시스템에 대해 소개한다. 그리고 V장에서는 실제 개발된 로봇팔의 구동 테스트를 수행하여 성능을 확 인하였다.
Copyright© ICROS 2016
* Corresponding Author
Manuscript received August 21, 2016 / revised September 19, 2016 / accepted October 10, 2016
강진일: 한국해양과학기술원-한국해양대학교 해양과학기술전문대학원 ([email protected])
최형식, 지대형, 오지윤, 김준영: 한국해양대학교 기계공학과 ([email protected]/[email protected]/[email protected]/jykim@
kmou.ac.kr)
전봉환: 선박해양플랜트연구소([email protected])
※ 본 연구는 한국해양과학기술원 부설 선박해양플랜트연구소에서 지 원하는 “다관절 복합이동 해저로봇 개발” 과제 연구결과의 일부이 고, 2016년도 정부(미래창조과학부)의 재원으로 한국연구재단-원자력 연구개발사업의 지원을 받아 수행된 연구임(No. 2015R1D1A3A01015 804).
II. 재난지역 탐사용 로봇팔 1. 탐사용 로봇팔 구조
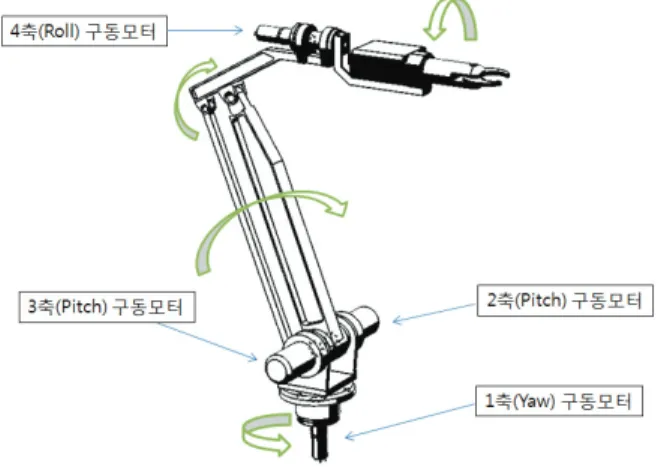
탐사용 로봇팔은 재난환경과 같이 협소하고 장애물이 있 는 공간에서도 카메라의 동작반경을 극대화할 수 있도록, 그 림 1과 같이 4자유도의 Pitch-Pitch-Pitch-Yaw 관절로 설계하였 다. 1~3축의 Pitch 모션을 통해 카메라 전개 높이와 상하 시야 확보가 가능하고, 4축의 Yaw모션을 통해 카메라 좌우 시야 확보가 가능한 구조이다. 또한 로봇 팔을 전개하지 않을 때 도 전방 시야 확보가 용이하도록 카메라 관절 링크를 구성하 였다. 탐사용 로봇팔의 외형 크기는 길이 540mm, 높이 240mm, 폭 225mm로 설계하고 제작되었다. 또한 그림 2와 같이 수심 10m에서의 방수 성능을 만족하기 위하여 각 관절 구동기 내부에는 최소 1bar의 내압성능을 위해 3중 O-ring 형 태의 방수 구조를 가지도록 설계하였다.
로봇팔 말단에 위치한 카메라 모듈은 그림 3과 같이 3개
의 챔버에 각각 고해상도 화상카메라, 고출력 LED, 열화상카 메라가 설치된다. 화상카메라와 열화상카메라를 내장하여 가 시광 영역뿐만 아니라 짙은 연기 속에서도 적외선을 이용하 여 영상을 획득할 수 있고, 고출력 LED를 장착하여 조명이 없는 지역에서도 시야를 밝힐 수 있다. 열화상 카메라와 고 출력 LED의 경우 발열이 발생하므로 이를 해결하고자 방열 판이 내압 실린더와 접촉하여 내부 열이 외부로 빠져나가도 록 설계하였다.
2. 탐사용 로봇팔 기구학 해석
4축 탐사용 로봇팔에 대한 기구학적 해석을 수행하였다.
D-H (Denavit-Hartenberg) 규약을 사용하여 그림 4와 같은 좌 표계를 설정하였다. 표 1과 같이 , , ,aiαi diθ 에 해당하는 각i
각의 관절 매개변수를 구하고 순기구학 해석을 수행하였다.
식 (1)과 같이 각각의 관절 링크를 4개의 기본 변환 행렬의 곱을 이용한 동차변환행렬 Ai로 표현하고, 이들을 순차적으 로 곱하여 전체 변환 행렬 T 를 구한 결과는 식 (2)와 같다.
1 1 1 1 2 2 2 2
1 1 1 1 2 2 2 2
1 2
3 3 4 4
3 3 4 4
3 4
3 4
0 0
0 , 0
0 0 1 0 0 0 1 0
0 0 0 1 0 0 0 1
0 0 0 0
0 0 , 0 0
0 1 0 0 0 1
0 0 0 1 0 0 0 1
c s a c c s a c
s c a s s c a s
A A
c s c s
s c s c
A A
d d
− −
⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥
=⎢ ⎥ =⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
⎡ ⎤ ⎡ − ⎤
⎢ − ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥
= =
⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
(1)
그림 1. 탐사용 로봇팔 형상.
Fig. 1. Configuration of the inspection robot arm.
그림 2. 구동기 내부 및 3중 O-ring 방수 구조.
Fig. 2. Inner configuration of motor housing with 3 layer O-ring for waterproofness.
그림 3. 카메라 모듈 내부.
Fig. 3. Inner configuration of camera module.
그림 4. D-H 좌표계 설정.
Fig. 4. D-H coordinate of 4-axis inspection robot arm.
표 1. D-H 좌표계 매개변수.
Table 1. D-H coordinate parameter of 4-axis inspection robot arm.
Link a i α i d i θ i
1 a 1 0° 0 θ 1*
2 a 2 0° 0 θ 2*
3 0 90° d 3 θ 3*
4 0 0° d 4 θ 4*
강 진 일, 최 형 식, 전 봉 환, 지 대 형, 오 지 윤, 김 준 영 890
4
0 1 2 3 4
T =A A A A
12 3 4 12 3 4 12 3 4 12 3 4 123 1 1 2 12 4 123
12 3 4 12 3 4 12 3 4 12 3 4 123 1 1 2 12 4 123
4 4 0 3
0 0 0 1
c c c s s c c c s s s s s a c a c d s s c c c s c s c s c s s c a s a s d c
s c d
− − + + +
⎡ ⎤
⎢ + − − − + − ⎥
⎢ ⎥
=⎢ ⎥
⎢ ⎥
⎢ ⎥
⎣ ⎦
(2)
여기서 ci=cos ,θi cij=cos(θ θi+ j), si=sin ,θi sij=sin(θ θi+ j) 이다.
순기구학 해석을 통해 로봇팔의 말단 위치는 식 (3)과 같다.
1 1 2 12 4 123
1 1 2 12 4 123
3
x a c a c d s y a s a s d c z d
= + +
= + −
=
(3)
이를 통해 역기구학 해석을 수행하여 θ θ θ θ1, , ,2 3 4를 구하 면 다음과 같다.
1 1 1
2 2 2 2
1 2
2 2
1
cos sin sin cos sin( )
2
m n a a
a m n β θ + β θ = θ +β
+ + −
= +
(4)
여기서 arctan m ,
β= ⎛ ⎞⎜ ⎟⎝ ⎠n sin 2m 2, m n
β = + cos 2n 2 m n β = +
4 123,
m= −x d s n= −y d c4 123이다.
식 (4)을 다시 정리하면 최종적으로 θ θ θ θ 를 구할 수 1, , ,2 3 4
있다.
2 2 2 2
1 2
1 2 2
1
arcsin 2
m n a a
a m n θ = ⎛⎜⎜⎝ + + + − ⎞⎟⎟⎠−β
(5)
1 1
2 1
2
arcsin n asin a
θ = ⎛⎜ − θ ⎞⎟−θ
⎝ ⎠ (6)
3 123 1 2
θ =θ − − (7) θ θ
4 arcsin( s123)
θ = − (8)
여기서 θ123= +θ θ θ1 2+ 3이다.
로봇팔의 속도 기구학은 순기구학 해석을 이용한 자코비 안(Jacobian)에 의해 결정된다. 자코비안은 로봇팔의 제어에 있어서 부드러운 궤적을 생성하고, 동역학 운동 방정식을 유 도하며 말단장치에서 관절로의 힘과 토크를 변환하는데 사 용된다. 식 (9)와 같이 자코비안은 로봇 말단장치의 각속도 및 선속도 벡터를 나타내는 6 n× 행렬로 표현된다.
0n v
w
J J J
= ⎢ ⎥⎡ ⎤
⎣ ⎦ (9)
4축 로봇팔의 경우 회전관절만을 이용하여 구성하였으므 로, 그에 대한 i번째 열에 대한 자코비안을 구하기 위한 공식 은 식 (10)과 같다.
1 1
1
( )
i n i
i
i
z o o
J z
− −
−
⎡ − ⎤
= ⎢ ⎥
⎣ ⎦ (10)
위의 식을 이용하여 4축 로봇팔의 자코비안 식을 표현하
면 식 (11)과 같다.
[ ]
4
0 v 1 2 3 4
w
J J J J J J J
=⎡ ⎤⎢ ⎥=
⎣ ⎦ (11)
자코비안 행렬을 구하기 위한 축좌표 o0~o4는 다음과 같다.
1 1 1 1 2 12
0 1 1 1 2 1 1 2 12
1 1 2 12 1 1 2 12 4 123
3 1 1 2 12 4 1 1 2 12 4 123
3 3
0
0 , ,
0 0 0
,
a c a c a c
o o a s o a s a s
a c a c a c a c d s o a s a s o a s a s d c
d d
⎡ ⎤ ⎡ ⎤ ⎡ + ⎤
⎢ ⎥ ⎢ ⎥ ⎢ ⎥
=⎢ ⎥ =⎢ ⎥ =⎢ + ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦ ⎣ ⎦
+ + +
⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥
=⎢ + ⎥ =⎢ + − ⎥
⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
(12)
파라미터 z0~z 는 다음과 같다. 여기서 k는 기준 좌표계3
의 방향으로 표시된 좌표계 i-1의 단위벡터를 나타낸다.
0 1
0 0 1 0
123
2 3
2 0 3 0 123
0 0
0 , 0
1 1
0 0 ,
1 0
z R k k z R k
s
z R k z R k c
⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥
= = =⎢ ⎥ = =⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥
= =⎢ ⎥ = = −⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
(13)
3. 탐사용 로봇팔 구동 모터 용량 설계
각 관절 축의 움직임을 LSPB (Linear Segments with Parabolic Blends) 방법을 이용하여 궤적을 생성하였다. 각 관절 구동기 의 가감속 시간을 ta로, 총 구동시간을 tt라고 한다면 다음 과 같은 식이 정립한다. K 는 각변위, ω 는 각속도, α 는 각 가속도를 나타낸다.
( 2 ) [ ]
a a a a c
K=tω + t − t ω rad (14) [ / ]
c
t a
K rad s t t
ω = − (15)
[ / ]2 c
a
rad s t
α =ω (16)
각 관절 구동기에 작용하는 토크는 가속운동, 등속운동, 감 속운동에 따라 3단계로 나눌 수 있다. 관성력에 의한 토크 ( ),T 가속에 필요한 토크( ),i Ta+ 등속에 필요한 토크( ),T 감c
속에 필요한 토크( )Ta− 는 다음과 같다.
i i
T I α= × (17)
a i f
T+= +T T (18)
0.5[ ]
c f
T T= = Nm (19)
a f i
T−=T − (20) T
관절 구조물의 자중에 의해 발생하는 토크 Tw는 다음과 같은 식으로 구할 수 있다.
w i i sin i
T =m g× ×d θ (21)
최종적으로 각 관절 구동기에 요구되는 구동 용량은 다음 식들을 통해 구해지고, 표 2와 같이 탐색용 로봇팔에 필요한 구동 용량을 산출하였다.
표 2. 탐색용 로봇팔 구동용량 산출 결과.
Table 2. Calculation results of motor power for inspection robot arm.
i Motion ηmax [rpm] Tmax [N · m] Pmax [W]
1 Pitch 6 70.56 65.21
2 Pitch 6 35.28 23.61
3 Pitch 10 11.76 12.37
4 Yaw 20 3.951 8.27
max max
max max max
60 360
30
a f
t
T T T
t
P T
η θ
η π
= ++
= ×
×
= × ×
(22)
4. 구조 작업용 로봇팔 구조
구조 작업용 로봇팔은 주행로봇의 이동을 방해하는 장애 물을 파쇄 또는 극복하기 위해 그림 5와 같이 중량의 작업공 구를 지지 가능한 4축의 관절로 구성된다. 로봇팔의 자유도 는 Yaw-Pitch-Pitch-Roll로 작업방향을 주행로봇 캐터필러의 움직임에 비해 정확한 1축의 Yaw모션으로 제어하고, 작업 높이의 조절을 위한 Pitch모션, 절단기 혹은 파쇄기의 진입각 도를 조절하기 위해 Roll모션을 적용하였다. 각 관절의 각도 변위는 2축의 경우 수직 기준으로 전방 10°~ 후방 90°이며, 3 축은 2축의 구조적 제한으로 40°를 움직일 수 있도록 설계하 였다. 4축 구동기는 작업방향과 정렬된 수평으로 배치된다.
표 3. 구조 작업용 로봇팔 구동용량 산출 결과.
Table 3. Calculation results of motor power for rescue operation robot arm.
i Motion ηmax [rpm] Tmax [N · m] Pmax [W]
1 Yaw 10 68.60 72.91
2 Pitch 6 127..40 93.21
3 Pitch 10 39.20 41.6
4 Roll 20 3.951 8.27
또한 중형 머니퓰레이터의 관절 형상은 4관절형 머니퓰레 이터 타입으로 하여 작업자의 최소 조작으로 툴의 평행한 진 입을 가능케 할 수 있다. 또한 고하중의 툴을 지지하기 위해 메인 붐과 보조 링크로 하중을 분산할 수 있어서 유리하다.
작업용 로봇팔의 크기는 680mm × 480mm × 270mm(1축 모터 제외)이다. 로봇팔 전개시 작업 가능 범위는 조립 플랜지 기 준으로 500~750mm이다.
또한 그림 6과 같이 외부로부터 분사되는 물로부터 모터 와 제어보드를 보호하기 위하여 각 관절 구동기 내부에는 O-ring 과 Oil Seal을 사용하여 방수가 가능토록 하였다.
5. 구조 작업용 로봇팔 구동 모터 용량 설계
앞서 소개한 4축 탐색용 로봇팔의 각 관절의 구동용량을 산출한 방법과 유사하게 구조 작업용 로봇팔의 구동 모터 용 량을 산출하였다. 작업용 공구의 무게는 10kg로 가정하고 각 축의 자중등을 고려하여 산출한 결과는 표 3과 같다.
III. 로봇팔의 동역학 해석
본 연구에서는 4축 로봇팔의 동역학 해석을 수행하기 위 해 반복적 뉴턴-오일러 방법을 이용하였으며, 로봇팔의 각 링크를 차례로 다루어, 직선운동과 회전운동을 나타내는 방 정식을 유도하였다.
여기서 ω0=α0=ac,0=ae,0=[0 0 0] T를 초기조건으로 시작하여, i를 1에서 n까지 증가시켜가며 연관 관계식을 구한다. 말단 조건 fn+1=0, τn+1=0으로 시작하여 fi와 τi를 계산하였다.
( )
( )
( )( )
( )( )
( )4 4 4, 4 4 4 4 4 4
4 4
3 3 4 3 3, 3 3 4 4, 4 3 3 3 3 3
3 3
2 2 3 2 2, 2 2 3 3, 3 2 2 2 2 2
2 2
1 1 2 1 1, 1 1 2 2, 2 1 1 1 1 1
c
c c
c c
c c
f r I I
R f r R f r I I
R f r R f r I I
R f r R f r I I
τ α ω ω
τ τ α ω ω
τ τ α ω ω
τ τ α ω ω
= − + +
= − + + +
= − + + +
= − + + +
(23)
뉴턴-오일러 방법에 의해 유도한 로봇의 운동방정식은 식 (23)과 같으나 본 연구에서는 일반 로봇과 달리 수중에서 동 작가능 하도록 메커니컬 실을 이용한 방수기능을 더하였다.
이 메커니컬 실은 스프링의 면압에 의해 외부의 물이 모터 및 전자장치가 설치된 로봇 링크 내부로 유입되는 것을 방지 하는 것으로 로봇관절의 동작에 마찰력을 일으키므로 이를 고려하여야 한다. 메커니컬 실에 의한 마찰부하 fr은 각 축에 대해 다음과 같이 표현된다.
ri i i
f =bω (24)
여기서 회전 댐핑 계수의 크기는 메커니컬 실의 면압에 비례 하며 실험을 통해 구할 수 있다. 식 (24)를 포함하는 로봇 운 동방정식은 다음과 같이 표현된다.
그림 5. 구조 작업용 로봇팔 형상.
Fig. 5. Configuration of the rescue operation robot arm.
그림 6. 구조 작업용 로봇팔 방수 구조(좌: 1축, 우: 2,3축).
Fig. 6. Waterproof structure of joint actuator (left: 1st axis, right: 2nd, 3rd axis).
강 진 일, 최 형 식, 전 봉 환, 지 대 형, 오 지 윤, 김 준 영 892
그림 7. 제어시스템 구조.
Fig. 7. Developed control system.
( )
( )
( )( )
( )( )
( )4 4 4, 4 4 4 4 4 4 4 4
4 4
3 3 4 3 3, 3 3 4 4, 4 3 3 3 3 3 3 3
3 3
2 2 3 2 2, 2 2 3 3, 3 2 2 2 2 2 2 2
2 2
1 1 2 1 1, 1 1 2 2, 2 1 1 1 1 1 1 1
c
c c
c c
c c
f r I I k q
R f r R f r I I k q
R f r R f r I I k q
R f r R f r I I k q
τ α ω ω
τ τ α ω ω
τ τ α ω ω
τ τ α ω ω
= − + + +
= − + + + +
= − + + + +
= − + + + +
(25)
IV. 제어 시스템
탐색용 로봇팔과 구조 작업용 로봇팔의 제어 구조는 그림 7과 같다. 기본적으로 주행 플랫폼과 로봇팔 사이의 통신은 RS232 통신을 기반으로 하고, 제어보드의 입출력 포트를 활 용하여 LED 라이트의 on/off를 제어한다.
탐색용 로봇팔에 사용된 모터드라이브는 100W급 소형 BLDC 모터드라이브가 사용되었고, 구조 작업용 로봇팔에 사용된 모터드라이브는 DC 200W급이다. 리미트 센서로는 소 형은 포토 인터럽트를 사용하며, 중형은 마이크로 스위치를 사용하여 제한 각의 위치 유무를 판단하는 역할을 수행한다.
V. 실험 결과 1. 로봇팔 구동 시험
그림 8과 같이 탐색용 로봇팔과 주행 플롯폼을 결합하여 말단장치가 주어진 궤적을 추종하는 테스트를 실시하였다.
그림 9와 같이 말단장치의 초기 위치(0mm, 550mm)에서 목표 위치(100mm, 550mm)까지 주어진 경로를 따라 이동하는 테스 트를 실시하였다. 그 결과 그림 10과 같이 3개의 피치관절이 주어진 경로를 만족하기 위해 역기구학 해석결과에 따라 동 작하는 것을 확인할 수 있었으며, 말단장치 위치 오차는 최 대 0.5mm 이내인 것을 확인하였다.
그림 8. 탐색용 로봇팔 및 주행 플랫폼 결합.
Fig. 8. Developed inspection robot arm with track vehicle.
그림 9. 탐색용 로봇팔 경로 추적 테스트.
Fig. 9. Configuration of inspection robot arm.
그림 10. 탐색용 로봇팔 말단 위치 궤적.
Fig. 10. End-effector trajectories of inspection robot arm.
그림 11. 수중 방수 및 구동 테스트.
Fig. 11. Waterproof test for inspection robot arm.
Jin-Il Kang, Hyeung-Sik Choi, Bong-Huan Jun, Dae-Hyeong Ji, Ji-Yoon Oh, and Joon-Young Kim
그림 12. 구조 작업용 로봇팔 구동 테스트.
Fig. 12. Motion experiment for rescue operation robot arm.
그림 13. 탐색용 로봇팔 및 주행 플랫폼 결합.
Fig. 13. Developed rescue operation robot arm with track vehicle.
또한, 그림 11과 같이 수조에서 탐색용 로봇팔의 방수 테스 트를 실시하였다. 시리얼 통신을 이용하여 외부에서 동작 명령 을 내려서 수중에서 각 관절각을 동작시키고, 고출력 LED의 동작과 카메라 동작을 확인하였다. 수중에서도 관절 구동기 의 누수현상 없이 원활하게 움직이는 것을 확인하였다.
그림 12와 같이 구조 작업용 로봇팔을 임시 지지대에 거치 후 10kg의 작업공구를 말단에 위치시킨 후 구동 테스트를 실 시하였다. 목표 가반하중을 부착하고 작업공구를 원하는 지 점까지 원활하게 이동이 가능했으며 일련의 프로세스를 자 동으로 반복하게 하여 조립완성도와 작동 신뢰도를 확인하 였다. 또 그림 13과 같이 주행 플랫폼과 구조 작업용 로봇팔 을 결합하여 플랫폼-로봇팔간의 통신 상태와 협조 체계를 확 인하였다.
VI. 결론
본 논문에서는 화재나 홍수로 인하여 침수된 지역에서 탐 사 및 구조 작업을 수행할 수 있는 방수형 4축 로봇팔을 설 계하고 이의 기구학 및 동역학 해석을 수행하였다. 탐색용 로봇팔은 Pitch – Pitch – Pitch – Yaw의 4축 구조로 설계하고 최 대 10m의 수심에도 방수가 가능한 구조로 설계하였다. 구조 작업용 로봇팔은 10kg의 작업용 공구하중을 지지할 수 있는 Yaw-Pitch-Pitch-Roll 구조로 설계되었고, 외부의 물 유입을 방 지할 수 있는 구조로 제작되었다. 설계한 로봇을 D-H 좌표계 를 설정하여 기구학 해석 및 역기구학 해석을 수행하였다.
또한 메커니컬 실의 마찰력을 고려한 로봇팔의 운동방정식 을 뉴턴-오일러 방법에 의해 유도하였다. 원칩 기반의 제어 시스템을 구성하여, 실제 로봇의 구동 테스트를 실시하여 주 어진 궤적을 0.5mm 이내로 추정하는 것을 확인하였다.
REFERENCES
[1] J. G. Kemeny, Report of the President’s Commission on the Accident at Three Mile Island, Dartmouth College, 1979.
[2] R. R. Murphy, “Activities of the rescue robots at the world trade center from 11-21 September 2001,” IEEE Robotics and Automation Magazine, pp. 50-61, 2004.
[3] T. Frost, C. Norman, S. Pratt, and B. Yamauchi, “Derived performance metrics and measurements compared to field experience for the packbot,” Proceedings of the 2002 PerMIS Workshop, MD, USA, 2002.
[4] J. R White, T. Sunagawa, and T. akajima, “Hazardous-duty robots - experiences and needs,” Proc. IEEE/RSJ Int. Workshop on Intelligent Robots and Systems (IROS ’89), pp. 262-267, 1989.
[5] Web site of Trends in Japan, Rescue Robots, http://web- japan.org/trends/09_sci-tech/sci100909.html.
[6] F. Michaud, M. Arsenault, Y. Bergeron, R. Cadrin, F. Gagnon, M.
Legault, M. Millette, and J. Bisson, “Co-design of AZIMUT, a multi-modal robotic platform,” ASME 2003 International Design Engineering Technical Conference and Computers and Information in Engineering Conference, Chicago, USA, Sep. 2- 6, 2003.
[7] P. Ben-Tzvi, A. A. Goldenberg, and J. W. Zu, “Design, simulations and optimization of a tracked mobile robot manipulator with locomotion and manipulation capabilities,”
IEEE International Conference on Robotics and Automation, pp.
2307-2312, 2008.
[8] T. K. Kim, H. S. Kim, J. B. Song, J. H. Baek, and J. K. Ryu,
“Arm design of a surveillance robot for stable camera view,”
Proceedings of the KSME 2010 Fall Annual Meeting (in Korean), pp. 1078-1080, 2010.
[9] S. S. Kim, J. B. Song, and H. S. Kim, “Design of a manipulator for surveillance robot using CFRP,” Proceeding of KSPE 2012 Spring Conference (in Korean), pp. 227-228, 2012.
[10] I. H. Lee, I. H. Kim, and J. H. Oh, “Removal of debris blocking an entryway – inverse kinematic control and balancing controller design for humanoid,” Journal of Institute of Control, Robotics and Systems (in Korean), vol. 20, no. 10, pp. 1063- 1066, Oct. 2014.
[11] J. H. Shin, “Decentralized robust adaptive control for robot manipulators with input torque saturation,” Journal of Institute of Control, Robotics and Systems (in Korean), vol. 21, no. 12, pp.
1160-1166, Dec. 2015.
강 진 일
2008년 한국해양대학교 기계시스템 공 학과 졸업. 2010년 동 대학원 석사. 2010 년~2015년 STX조선해양 생산기술 연구.
2015년~현재 KIOST-KMOU 해양과학기 술전문대학원 박사과정. 관심분야는 수 중 매니퓰레이터, 강인 제어.
강 진 일, 최 형 식, 전 봉 환, 지 대 형, 오 지 윤, 김 준 영 894
최 형 식
1993년 North Carolina 로봇공학(공학박 사). 1993년 한국기계연구원 Post Doctor.
1993년~현재 한국해양대학교 기계공학 부(교수). 관심분야는 무인수중로봇의 설계 및 제어, 로봇 매니퓰레이터 설계 및 제어, 수중 항법, 수중 광통신.
전 봉 환
1994년 부경대학교 기계공학과 졸업.
1996년 동 대학원 석사. 2006년 충남대 학교 메카트로닉스공학 박사. 1996년~
현재 한국해양과학기술원 선박해양플 랜트연구소 해양시스템연구부 수중로 봇연구실 책임연구원. 관심분야는 무인 잠수 정설계, 로보틱스 수중응용.
지 대 형
2014년 한국해양대학교 제어자동화공학 과 졸업. 2016년 동 대학원 석사. 2016년
~현재 동 대학원 박사과정 재학 중. 관 심분야는 해양로봇,수중항법.
오 지 윤
2013년 한국해양대학교 기계시스템공학 과 졸업. 2015년 동 대학원 석사. 2015년
~현재 동 대학원 박사과정 재학 중. 관 심분야는 자율제어,수중항법.
김 준 영
1989년 인하대학교 조선해양공학과 졸 업. 1993년 동 대학원 석사. 1999년 한양 대학교 정밀기계공학과 박사. 2011년~현 재 한국해양대학교 기계공학부 교수.
관심분야는 수중로봇 설계 및 제어, 수 중로봇 모델링 및 관측기 설계.