A Study on the 3D Reconstruction and Historical Evidence of Recumbent Buddha Based on Fusion of UAS, CRP and Terrestrial LiDAR
14
0
0
전체 글
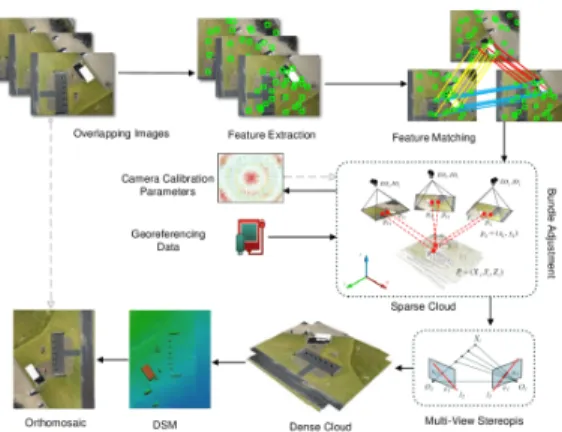
(2) 오성종 ∙ 이용창. 1. 서론. 지금까지 카메라를 활용하여 대상체의 근접촬영에 의한 사진측량(Close Range Photogrammetry, CRP). 2019년 4월 15일에 발생한 노트르담 대성당 화재로. 과 컴퓨터 비전의 융합으로 SfM(Structure-from-. 인해 과거 2008년 2월 10일에 국내에서 발생한 숭례. Motion) 기반의 항공삼각측량(aerotriangulation)을. 문 화재사건이 수면 위에 다시 올라 문화재 보존 및 재. 통한 실세계 스케일의 3차원 재현 모델 생성 및 형상. 현에 대한 관심이 집중되고 있다(조선일보 2019). 또. 재현이 가능한 영상처리 프로그램들이 최근 다양하게. 한, 4차 산업혁명 시대에 들어서며 다양한 센서로 개. 개발되고 있다(강준오 2018). 이러한 UAS, LiDAR,. 념이 확대되어 획득한 데이터를 융합한 융합공간정보. CRP 등 다양한 센서로 획득한 공간정보 데이터들을. 로 확장되고 있다. 특히, 이러한 센서를 탑재하여 사람. 융합하여 활용한다면 더욱 효율적이고 정밀한 문화재. 의 접근이 어려운 곳에 데이터를 획득하는 무인항공. 보존 및 재현이 가능할 것으로 판단된다.. 기(Unmanned Aerial Vehicle, UAV) 플랫폼을 활용 한 연구가 활발히 진행되고 있다(한승희 2018).. 최근 이러한 기술을 토대로 다양한 분야에서 무인 항공시스템 및 지상 LiDAR를 활용한 대상체의 3차원. 현재 문화재의 보존은 문화재청의 ‘국보·보물 건조. 재현에 관한 연구는 활발히 진행되어 왔지만, 문화재. 물 문화재 정밀실측 지침’에 따라 기본실측, 정밀실측,. 를 대상으로 할 경우 대상에 따라 단순 외형의 3차원. 3D 스캔 실측, 광파기 실측 등 다양한 종류 및 방법에. 재현뿐만 아니라 내재되어있는 문화재의 고증에 대한. 따라 실시되고 있다. 이중, 3D 스캔 실측은 지상. 확인이 필요하다. 고증은 표준국어대사전에 의하면. LiDAR(Light Detection And Ranging)의 스캐닝을. ‘예전에 있던 사물들의 시대, 가치, 내용 따위를 옛 문. 활용하여 문화재를 3차원 좌표를 가진 포인트 클라우. 헌이나 물건에 기e하여 증거를 세워 이론적으로 밝. 드(point cloud)로 구성하여 실측하게 된다(문화재청. 힘’을 뜻한다. 이러한 고증이 담긴 문화재는 형상 및. 2014). 하지만, 다양한 형태를 가진 문화재의 특성상. 양식뿐만 아니라 당시의 사회적, 기술적, 사상적 배경. 그 규모 및 표면 요철에 따라 스캔의 사각지대가 발생. 등이 담겨있어 문화재로써 역사적 가치를 확인할 수. 하고 비교적 긴 정밀 스캔시간 및 스캔범위에 대한 한. 있는데 이러한 것을 토대로 국보, 보물 등 다양한 종목. 계가 있다. 이를 보완하기 위해 고해상도의 카메라를. 으로 분류한다. 대상이 천문학적, 지리적 고증이 담긴. 탑재하여 저고도 비행을 통해 영상을 획득하는 것뿐. 문화재라면 3차원 재현 모델을 통해 문화재를 디지털. 만 아니라 영상처리(image processing)하여 3차원 재. 형태로 재현할 뿐만 아니라 실세계 좌표를 기반으로. 현 모델을 생성하는 무인항공시스템(Unmanned Aerial. 고증 확인을 통해 문화재에 담긴 선조들의 지혜와 내. System, UAS)이 대안으로 거론되고 있다(허의행 2018).. 재된 가치를 더욱 깊게 확인할 수 있을 것으로 판단. 최근 공간정보분야에선 2018년 3월 30일에 ‘무인비행. 된다.. 장치 이용 공공측량 작업지침’이 국토지리정보원에서 제정되고 이에 따라 공공측량에서의 무인항공시스템. 2. 연구방법 및 목적. 을 통해 정밀한 공간정보 구축에 활용할 수 있게 되었 다(국토지리정보원 2018). 무인항공시스템은 최근 컴. 본 연구는 Figure 1의 흐름과 같이 실세계 좌표기반. 퓨터 비전(Computer Vision, CV)의 발전으로 센서의. 으로 고증을 확인할 수 있는 문화재를 선정, 3차원 재. 기술적 성능 향상 및 경량화에 맞춰 다양한 산업분야. 현을 위해 대상체 주변에 지상기준점 및 검사점을 설. 의 시장 보급률 및 수요량이 증가하고 있다.. 치하여 GNSS Network-RTK 측량을 통해 높은 정확. 112. 「지적과 국토정보」 제51권 제1호. 2021.
(3) UAS, CRP 및 지상 LiDAR 융합기반 와형석조여래불의 3차원 재현과 고증 연구. UC모델은 UAV로부터 획득한 무인항공영상에 근 접영상을 추가하여 영상처리를 함께 실시하여 3차원 재현 모델을 생성한다. ULC모델은 무인항공영상과 근접영상을 함께 영상 처리를 실시하여 획득한 3차원 특징점을 실세계 좌표 기반의 지상 LiDAR 포인트 클라우드를 융합, 번들 블 록 재조정하여 생성된 포인트 클라우드를 기반으로 3 차원 재현 모델을 생성하여 비교·분석한다. 본 연구의 목적은 CMOS 센서의 무인항공영상과 CCD 센서의 근접사진 및 지상 LiDAR의 포인트 클라 우드를 융합하여 3차원 재현 모델을 생성하여 재현 정 확도를 비교·분석할 뿐만 아니라, 가장 재현 정확도가 높은 모델을 토대로 문화재에 담긴 천문학적 고증을 Figure 1. Study flow chart. 도의 3차원 실세계 좌표 데이터를 획득한다. GNSS 측 량이 실시된 지점에 스캔 스테이션을 설정, 지상 LiDAR의 레이저 스캐닝을 ‘국보·보물 건조물 문화재 정밀실측 지침’에 따라 실세계 좌표기반 문화재의 3차. 확인하는 것이다.. 3. SfM과 LiDAR 이론 3.1. Structure-from-Motion. 원 포인트 클라우드 데이터를 1cm 이내 정확도로 획. SfM은 사진측량기술과 컴퓨터 비전의 영상처리 기. 득한다. 또한, 고해상도 CMOS(Complementary Metal. 술이 융합하여 실시되는 해석 과정으로 대상체를 중. Oxide Semiconductor: 전자를 각 화소 내에서 전압. 심으로 충분한 중복도로 촬영된 영상의 위치 및 자세. 으로 변환 후 출력) 카메라를 탑재한 무인항공기를 통. 정보를 기반으로 카메라의 위치 및 방향을 역으로 추. 해 항공영상을 획득하고, CCD(Charge Coupled Device:. 적하여 영상과 카메라의 관계를 구조화하는 알고리즘. 전자를 그대로 게이트 펄스를 이용하여 출력)센서를. 으로 전체적인 영상처리 흐름은 Figure 2와 같다.. 탑재한 카메라를 활용, 문화재의 근접영상을 획득하. 중복도가 높은 다수의 영상에서 카메라의 3차원 위. 여 무인항공영상과 근접영상을 SfM기반으로 영상처. 치정보(x, y, z) 및 자세정보(κ, φ, ω)를 통해 공액기하. 리를 한다. 이후, 획득한 대상체의 데이터를 바탕으로. 구속조건(공액선이 기선에 대해 일정한 경사를 이루. 영상처리 조합에 따라 각각 UL모델(UAS+LiDAR),. 는 조건)을 만족하는 특징점을 추출 및 매칭한다. 이렇. UC모델(UAS+CRP), ULC모델(UAS+LiDAR+CRP)의. 게 산출된 특징점은 번들 블록 조정을 실시하여 카메. 조합으로 총 3가지의 3차원 재현 모델을 생성한다.. 라의 왜곡보정 및 상대표정을 해결하며 촬영 시 발생. UL모델은 UAS의 영상처리결과로 획득한 3차원 특. 한 외부적 요인을 제거하거나 최소화하고 상대좌표값. 징점과 지상 LiDAR로부터 획득한 좌표기반의 포인트. 을 개선하여 대상체의 대략적인 3차원 점군 데이터. 클라우드를 융합, 번들 블록을 재조정하여 포인트 클. (sparse cloud)를 생성한다. 이후, 다중 입체시(Multi-. 라우드를 기반으로 3차원 재현 모델을 생성한다.. View Stereopis)를 통해 밀도 높은 포인트 클라우드 Journal of Cadastre & Land InformatiX Vol.51 No.1 (2021). 113.
(4) 오성종 ∙ 이용창. Figure 3. The schematic of a ToF sensor Source: Ling et al. 2019. Figure 2. Workflow of SfM photogrammetry Source: Farid 2018. 계 좌표 데이터를 기반으로 스캔 스테이션을 사전에 설정한 후 스캔을 진행한다면 실세계 스케일의 포인. 를 생성, 이를 메쉬(mesh) 작업하여 정사영상(ortho-. 트 클라우드가 획득 가능하다. 또한, 시스템에 고해상. photo), DSM(Digital Surface Model), 3차원 모델링. 도 RGB 카메라를 탑재하여 ToF방식을 통해 확인된. 등 다양한 3차원 재현이 가능하게 해준다. 특히, 번들. 대상체의 포인트 클라우드에 색상 및 농담을 입힐 수. 블록 조정 시 실세계 기반의 좌표를 입력하여 절대표. 있다(이용창 2019).. 정요소를 해결할 경우 실세계 스케일의 3차원 재현이 가능하다(Farid 2018).. 현재 ToF 센서는 차세대 이미지 센서로 각광 받고 있어 기술의 발전으로 경량화, 소형화, 경제성 증가를 통해 최신 모바일 디바이스에 고해상도 카메라와 함. 3.2. LiDAR 측량. 께 탑재되어 대상체의 입체감을 표현하는데 활용될 뿐만 아니라, 다양한 증강현실 및 간편한 공간감을 표. LiDAR 측량은 단색성, 간섭성, 지향성을 가지고 있. 현한 3차원 모델링에 활용되고 있다(Apple 2021).. 는 레이저(Laser)를 통해 일정 범위 내 측정하고자 하 는 대상체까지의 거리 및 대상체의 표면 농도, 속도,. 4. 데이터 획득. 형상 등 물리적 특성을 측정하는 기법이다. 이러한 측 정을 위한 LiDAR 측량은 렌즈를 포함한 광학부, 레이. 연구대상은 전라남도 화순군 도암면에 있는 운주사. 저 송·수신부, 데이터 획득 및 처리부로 구성되어 수. 의 와형석조여래불(이하 와불)로 Figure 4과 같이 불. 신기의 측정 각도를 나타내는 FoV(Field of View), 레. 상이 하늘을 보고 누워있는 형태로 있고, 주변에 수목. 이저 수신기의 FoV 오버랩 특성 등을 통해 그 성능이. 이 적어 대상을 중심으로 전체적인 무인항공영상촬영. 결정된다.. 및 근접사진촬영, 레이저 스캐닝이 용이하다.. Figure 3은 ToF(Time-of-Flight) 방식을 나타낸. 옛 문헌 및 역사적 사료에 의하면 와불은 미래에 인. 것으로 대상체를 향해 발사한 레이저 광이 반사되어. 간계에 하승하여 미륵불이 될 경우, 누워있던 몸을 비. 수신부로 돌아오는 시간차를 활용, 대상체까지의 거. 로소 일으킨다는 전설과 함께 당시 북극성을 신성시. 리를 계산하여 대상체의 형상을 3차원 좌표 속성을 가. 여겼던 고려시대의 불교 천문학의 고증이 담긴 채로. 진 포인트 클라우드로 생성한다. 시스템 내부에 실세. 11세기 e 제작되었다고 전해진다(고춘심 2007; 김창. 114. 「지적과 국토정보」 제51권 제1호. 2021.
(5) UAS, CRP 및 지상 LiDAR 융합기반 와형석조여래불의 3차원 재현과 고증 연구. Table 2. Trimble R8 GNSS specification Source: www.trimble.com Stop Positioning (RMS). Vertical:3.5mm+0.4ppm Horizontal:3mm+0.1ppm. VRS (RMS). Vertical:15mm+0.5ppm Horizontal:8mm+0.5ppm. Input. CMR+, CMRx, RTCM 2.1~3.1. Output. 24 NMEA. Radio Modem. 403 MHz. Signal Update Cycle. 1~20Hz. Chennal. 440 Chennal. Figure 4. Recumbent Buddha in Unju-temple. 현 2011). 이는 현장에서도 확인할 수 있었는데 와불 근처에 북두칠성을 투영하여 만든 칠성바위가 존재하 여 북극성과의 연관성이 있을 것으로 추측, 현장에서. Table 3. Ground control points and check points. 나침반으로 확인 시 누워있는 방향이 북쪽을 향한 것 을 확인했다(김일권 2014). 무인항공·지상 영상촬영 및 지상 LiDAR 스캔을 위 한 지상기준점 및 검사점, 스캔 스테이션 측량에 활용 된 장비는 Table 2와 같은 성능의 Trimble사 R8 GNSS 수신기로, Network-RTK 측량을 통해 EPSG: 5186 좌표계의 X, Y성분과 GRS80 타원체의 타원체 고 기반 Z성분의 실세계 좌표 데이터를 획득했다. 무인비행장치 이용 공공측량 작업지침(국토지리정 보원 2018)을 준수하여 UAS와 CRP의 항공삼각측량. Points. EPSG:5186. GRS80. X (m). Y (m). Z (m). G01. 188904.368. 258639.304. 134.415. G02. 188931.273. 258657.060. 130.678. G03. 188939.505. 258706.594. 137.422. G04. 188889.210. 258737.140. 160.292. G05. 188892.084. 258755.483. 158.624. (Check Point, CP)으로 지정, Table 3과 같이 획득. G06. 188872.472. 258761.377. 161.504. 했다.. G07. 188865.336. 258719.261. 163.461. C01. 188894.313. 258753.968. 158.769. C02. 188888.823. 258739.986. 159.673. C03. 188889.255. 258743.986. 159.675. 및 사진측량을 위한 지상기준점(Ground Control Point, GCP) 7점(G01∼G07)을 와불을 중심으로 지오 레퍼런싱(Geo-Referencing)을 통한 실세계화를 위 해 인공타겟을 설치 후 획득했고, 영상 내에서 식별이 용이한 자연점 3곳(C01∼C03)을 선정하여 검사점. 무인항공영상촬영을 위한 UAV는 Table 4와 같은 제원의 DJI사 Phantom 4 Pro로 20Mpx, 5472×3648 의 고해상도 CMOS RGB 카메라가 탑재되어 있다. 와. G C P ( ). C P ( ). 불을 중심으로 Pix4D Capture 어플리케이션을 활용 하여 고도 30m, 종·횡중복도 80%, 카메라 각도 80°로. (Ground Sample Distance) 0.82cm/px의 총 451매. 3D 모델링에 유리한 더블 그리드 촬영을 실시, GSD. 무인항공영상을 획득하였다. Journal of Cadastre & Land InformatiX Vol.51 No.1 (2021). 115.
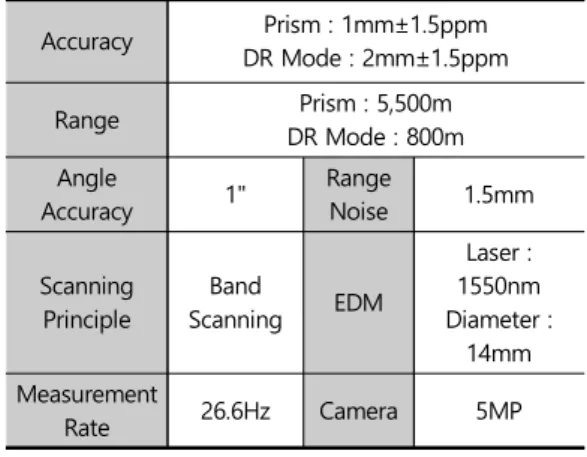
(6) 오성종 ∙ 이용창. Table 4. DJI Phantom 4 Pro specification. Table 6. Trimble SX10 specification. Source: www.dji.com FoV. Horizontal:±60°, Vertical:±54°. Sensor. 1" CMOS. Focal Length. 8.8mm. ISO. 100~3200. Resolution. 5472×3648. 35mm eq.. 24mm. F-Stop. F/5.6. Table 5. Canon IXUS 180 specification Source: www.canon.co.uk Sensor. 1/2.3'' CCD. Focal Length. 4.3~43mm. ISO. 100~1600. Resolution. 5152×3864. 35mm eq.. 24~240mm. F-Stop. F/3.0~6.9. CRP를 위한 지상카메라는 Canon사의 IXUS 180 디 지털 카메라를 활용했으며, 대상체를 중심으로 중복 촬영하여 386매의 영상을 획득하였다. 20Mpx 해상도 의 CCD 센서를 탑재한 디지털 카메라로 제원은 Table 5와 같다. 지상 LiDAR 데이터 획득을 위해 Trimble 사의 SX10 레이저 스캐너를 활용 국보·보물 건조물 문화재 정밀실측 지침을 준수하여 스테이션 정확도 0.002m 이내로 5곳의 스테이션을 확인 및 설정 후, GNSS 측 량을 실시하여 스캔 스테이션에 획득한 좌표 데이터 를 입력한다. 이후 레이저 스캐닝을 실시하여 와불의 3차원 포인트 클라우드를 획득하였다. ToF 방식의 스 캐닝 기술을 탑재한 Trimble SX10은 스캐닝 각 정밀 도 1", 1.5mm의 거리오차, 1mm±1.5ppm의 정확도로 3차원 레이저 스캐닝이 가능하다. Trimble SX10을 설 치한 5곳의 스캔 스테이션에서 획득한 와불의 포인트 클라우드 총 9,384,436점을 획득했고, 장비의 제원은 Table 6과 같다.. Source: www.trimble.com Accuracy. Prism : 1mm±1.5ppm DR Mode : 2mm±1.5ppm. Range. Prism : 5,500m DR Mode : 800m. Angle Accuracy. 1". Range Noise. 1.5mm. Scanning Principle. Band Scanning. EDM. Laser : 1550nm Diameter : 14mm. Measurement Rate. 26.6Hz. Camera. 5MP. 5. 데이터 처리 및 비교·분석 UAV로부터 획득한 451매의 CMOS 무인항공영상 과 디지털 카메라로부터 획득한 386매의 CCD 지상영 상, 지상 LiDAR 스캐닝으로부터 획득한 9,384,436점 의 포인트 클라우드를 융합하여 각각 UL모델, UC모 델, ULC모델을 SfM 기반 번들 블록 조정 및 영상처리 를 통해 생성한다. UL모델의 경우 앞선 연구를 통해 획득한 모델을 활용하여 비교·분석하였다(오성종 2020). 본 연구에 활용된 영상처리 소프트웨어는 Bentley사의 Context Capture Master로 다양한 UAS 영상처리 소프트웨어 중 외형의 3차원 재현에 있어 비 교적 우수한 특징을 갖고 있다. UL모델(UAS+LiDAR)은 먼저 451매의 무인항공영 상을 활용하여 항공삼각측량을 실시, 사진의 왜곡보 정, 내부표정 및 상호표정이 수행된 3차원 특징점에 지상기준점 7점을 입력하여 절대표정을 수행, 실세계 스케일의 3차원 대략적인 포인트 클라우드를 획득했 다. 이후 지상 LiDAR로부터 획득한 3차원 포인트 클 라우드를 추가하여 번들 블록 재조정을 실시, Figure 5의 A1∼A3과 같은 3차원 융합모델을 생성하였다. 생 성된 융합모델의 검사점 정확도는 모델상에서 좌표를. 116. 「지적과 국토정보」 제51권 제1호. 2021.
(7) UAS, CRP 및 지상 LiDAR 융합기반 와형석조여래불의 3차원 재현과 고증 연구. UL Model (UAS+LiDAR). UC Model (UAS+CRP). ULC Model (UAS+CRP+LiDAR). (A1) top. (B1) top. (C1) top. (A2) blind spot. (B2) blind spot. (C2) blind spot. (A3) side. (B3) side. (C3) side. Figure. 5 The result of three fusion models. 확인하여 앞서 획득한 GNSS 측량 데이터와 비교하였. 5의 B1∼B3과 같이 생성하였다. 검사점 정확도는. 다. 각 좌표 오차의 절대값을 평균한 평균 절대 오차. MAE 기준 X:0.010m, Y:0.016m, Z:0.019m로 1cm. (Mean Absolute Error, MAE) 기준 검사점 C01∼C03. 내외의 정확도를 나타내었고, RMSE 기준 X:0.011m,. 의 좌표 정확도는 X:0.007m, Y:0.005m, Z:0.008m로. Y:0.017m, Z:0.020m로 지적경계 오차범위인 3cm 이. 1cm 이내의 정확도를 나타내었고, 정밀도 표현에 적. 내에 X, Y, Z성분 모두 만족하였지만, 국보·보물 건조. 합한 평균 제곱근 오차(Root Mean Square Deviation,. 물 문화재 정밀실측 지침 기준 1cm에는 만족하지 못. RMSE) 기준 X:0.008m, Y:0.005m, Z:0.008m의 좌표. 한 결과를 나타냈다. 와불의 옆면 재현(Figure 5의. 정확도로 공간정보에 있어 가장 범용적으로 쓰이는. B3)은 지상에서 근접촬영한 영상으로 인해 UL모델보. 지적경계 오차범위 3cm 이내에 부합하는 좌표 정확. 다 더욱 선명한 결과가 나타났지만, 무인항공촬영의. 도를 나타낼 뿐만 아니라 국보·보물 건조물 문화재 정. 주사각 및 근접촬영 시 문화재에 직접적으로 접근이. 밀실측 지침 기준 1cm에 모두 부합한 결과를 나타냈. 어려운 환경으로 인해 Figure 5의 B2와 같이 사각지. 다. 다만, 무인항공영상의 촬영각도에 의해 와불의 옆. 대가 발생, 3차원 재현에 있어 다소 미흡한 부분이 발. 면 재현에 있어 Figure 5의 A3와 같이 선명하지 못한. 견되었다.. 결과가 나타났다.. 마지막으로 ULC모델(UAS+LiDAR+CRP)은 UC모. UC모델(UAS+CRP)은 총 837매의 항공 및 지상영. 델 생성과정에서 SfM기반 영상처리를 실시하여 생성. 상을 활용, GCP 7점을 입력한 후 SfM기반 영상처리를. 된 실세계 3차원 포인트 클라우드에 지상 LiDAR의 3. 실시하여 실세계 스케일의 3차원 융합모델을 Figure. 차원 포인트 클라우드를 입력, 번들 블록을 재조정하. Journal of Cadastre & Land InformatiX Vol.51 No.1 (2021). 117.
(8) 오성종 ∙ 이용창. 여 Figure 5의 C1∼C3과 같은 3차원 융합모델을 생성 하였다. ULC모델은 UAS 및 CRP에서 처리되지 않았. Table 7. Check points accuracy of the 3D fusion models (unit : m). 던 촬영 사각지대가 보완 및 와불의 옆면 재현이 선명 하게 되어 실제와 가장 흡사한 3차원 재현 모델을 생 성하였다. 검사점 정확도는 MAE 기준 X:0.005m, Y:0.004m, Z:0.005m로 0.5cm 안팎의 정확도를 나타 내어 가장 우수한 MAE 정확도로 생성되었을 뿐만 아 니라, RMSE 기준으로도 X:0.005m, Y:0.004m, Z:0.006m로 지적경계 오차범위 3cm 이내 및 국보·보 물 건조물 문화재 정밀실측 지침 기준인 1cm 이내 모 두를 만족하는 정확도를 나타내었다. 각 UL모델, UC모델, ULC모델의 정확도는 Table 7 과 같이 나타났다. SfM기반 영상처리를 통해 3차원 재현 모델 생성 시에 대상체에 대한 영상이 많을수록. Models UL Model. 외형 재현이 우수했고, 지상 LiDAR로부터 획득한 정 확도 높은 3차원 포인트 클라우드로 번들 블록을 재조. UC Model. 정할 경우, 검사점의 좌표 정확도가 높아지는 것을 확 인할 수 있었다. 특히, UAS 및 CRP의 경우 Z성분의 좌표오차가 X,. ULC Model. C01. C02. C03. MAE. RMSE. X. 0.009. 0.004. 0.009. 0.007. 0.008. Y. 0.002. 0.007. 0.006. 0.005. 0.005. Z. 0.010. 0.007. 0.007. 0.008. 0.008. X. 0.005. 0.014. 0.011. 0.010. 0.011. Y. 0.005. 0.019. 0.023. 0.016. 0.017. Z. 0.020. 0.015. 0.023. 0.019. 0.020. X. 0.004. 0.004. 0.006. 0.005. 0.005. Y. 0.002. 0.004. 0.006. 0.004. 0.004. Z. 0.003. 0.006. 0.007. 0.005. 0.006. Y성분의 좌표 오차에 비해 비교적 큰 것을 확인할 수 있었는데, 이것은 UAV를 활용한 항공삼각측량 중 영 상처리 과정에서 발생하는 특성으로 정확도 높은 지. 시기는 지금으로부터 1,000년 전인 서기 1021년으로. 상 LiDAR의 포인트 클라우드와 융합된다면 Z성분의. 정한다.. 좌표가 보정되어 정확도가 향상되는 효과를 확인했다.. 둘째, 지금의 북극성과 와불 축조 당시의 북극성 모 두는 작은곰자리의 알파성인 폴라리스(Polaris)를 지. 6. 고증 확인. 칭하며, 현재 2021년 지구 자전축인 진북(N:90°, E:180°)에 위치한다.. 3가지의 융합모델 중 검사점 정확도가 가장 높은. 셋째, 축조 당시로 가정한 1021년 이후 와불엔 지금. ULC모델을 바탕으로 와불 축조 당시의 천구를 재현. 까지 어떠한 지면, 지반 및 지각 변동의 영향으로 인한. 하여 북극성과 어떠한 관계의 고증이 담겨있는지 확. 와불의 위치변화는 없었다.. 인한다. 고증분석을 위해 옛 문헌 및 기록, 천문학을 바탕으로 총 3가지의 가정을 설정 후 ULC모델을 통해. 6.1. 운주사 천구 재현. 고증을 확인한다. 첫째, 운주사의 와불 축조 시기는 운주사 역사 문헌. 지구의 장동운동과 세차운동으로 발생하는 자전축. 및 기록에 의해 약 11세기 e 고려시대로 추정되며, 그. 변화가 지구에서 바라보는 천구 위치에 영향을 주기. 118. 「지적과 국토정보」 제51권 제1호. 2021.
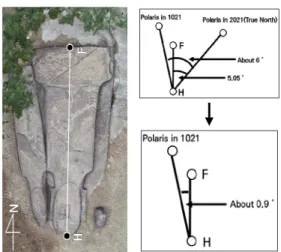
(9) UAS, CRP 및 지상 LiDAR 융합기반 와형석조여래불의 3차원 재현과 고증 연구. Figure 6. Polaris location in 1021(Top) and in 2021(Bottom). 때문에 서기 1021년 와불 축조 당시의 천구를 재현하 기 위해 천체관측 소프트웨어인 Stellarium을 활용하 였다. Stellarium은 입력한 위·경도 좌표를 기반으로 지금으로부터 ±10만년 까지 총 20만년의 스케일로 지 구 세차운동을 고려한 시간에 따른 천체의 변화를 가 상 시뮬레이션 할 수 있다. 먼저 와불 위치에 따른 천체변화를 확인하기 위해 ULC모델상에서 와불 중심 좌표 데이터의 위도, 경도 [N:34.9246927°, E:126.8783380°]를 Stellarium에 입력, 와불 위치에서 1021년의 천구를 Figure 6과 같 이 재현했다. 와불 축조 당시 북극성 폴라리스의 위치는 진북으 로부터 약 7° 정도 서쪽에 위치했었고, 현재 북극성 위 치는 진북과 약 1° 정도 서쪽으로 편차를 두고 위치하 여, 지구 세차운동에 따른 1,000년 동안의 폴라리스의. Figure 7. Northward deviation of Recumbent Buddha. 중심방향의 북쪽을 향하고 있어 미륵불이 됐을 때 와 불이 일어서게 된다면 북극성을 바라보도록 제작되었 음을 알 수 있었다. 이후, ULC모델을 활용하여 북극성 과의 북향 정확도를 확인하기 위해 Figure 7의 좌측 그림과 같이 와불의 가장 큰 불상의 머리 부분 중심 (H)과 다리 부분 중심(F)의 모델상 좌표 데이터를 기 반으로 북향편차를 확인하였다. GRS80 타원체를 기 준으로 와불 머리 부분 중심(H)의 좌표는 [N: 34.9246438°, E:126.8783325°], 다리 부분의 중심(F) 의 좌표는 [N:34.9247524°, E:126.8783427°]로 확 인됐다. 진북의 좌표는 자오선을 따라 [N:90°, E:180°]로. )을 그어 GRS80 H에서부터 F방향의 가상 직선( 타원체의 곡률보정 후 계산한다. 그 결과 Figure 7의. 움직임은 진북으로부터 서쪽으로 약 6° 정도 이동해. )의 북향편차는 서쪽 우측과 같이 와불 중심 직선( . 야 하는 것을 확인했다.. 방향으로 약 5.05°의 각을 가지고 있음을 확인하였다. 이를 1021년의 북극성 위치와 비교했을 경우, 동쪽으. 6.2. 와형석조여래불과의 관계. 로 약 0.9° 정도로 뛰어난 불교 천문학적 지식을 바탕 으로 낮은 북향편차를 갖고 와불이 제작되었음을 알. 와형석조여래불과 북극성의 연관성 확인을 위해 현. 수 있었다.. 장에서 나침반을 활용, 머리 부분의 중심과 다리 부분 Journal of Cadastre & Land InformatiX Vol.51 No.1 (2021). 119.
(10) 오성종 ∙ 이용창. 7. 결론. 불의 사각지대 또한 보완되어 가장 우수한 3차원 재현 모델을 생성하였다.. 본 연구는 UAS, CRP 및 지상 LiDAR로부터 취득한. 넷째, 3차원 재현이 가장 우수한 ULC모델을 기반으. 무인항공 및 근접영상과 3차원 포인트 클라우드를 활. 로 와형석조여래불에 담긴 11세기 e 고려시대의 불. 용, 각 조합별 3차원 융합 재현 모델의 재현 정확도를. 교 천문학적 고증을 확인했다. 와불의 북향성을 현장. 비교하고 와형석조여래불에 담긴 불교 천문학적 고증. 에서 전자 나침반을 통해 확인하였고, 와불이 미륵불. 을 확인한 결과 다음과 같은 결론을 도출하였다.. 이 되어 일어나게 될 시 북극성을 바라보는 방향으로. 첫째, UAS 및 지상 LiDAR를 융합한 UL모델의 해석. 제작되었음을 알 수 있었다. 이후 정확한 검증을 위해. 결과 MAE 기준 [X:0.007m, Y:0.005m, Z:0.008m],. ULC모델을 활용하여 확인한 결과, 와불 중심선의 북. RMSE 기준 [X:0.008m, Y:0.005m, Z:0.008m] 으로. 향 정확도는 축조 당시로 가정한 서기 1021년에 북극. 지적경계오차인 3cm 이내에 부합한 모델이 생성되었. 성으로부터 동쪽 약 0.9° 차이로 나침반의 발명 이전. 을 뿐만 아니라, 국보·보물 건조물 문화재 정밀실측. 시대임에도 불구하고 뛰어난 정확도로 제작되었음을. 지침 기준인 1cm 이내에도 부합한 정확도 높은 3D 융. 확인하였다.. 합모델이 재현되었다. 하지만, 와불의 옆면은 무인항. 본 연구를 통해 무인항공영상을 해석·활용한 무인. 공촬영 시 촬영한 카메라 각도에 의해 부족한 옆면이. 항공시스템과 근접사진측량, 지상 LiDAR 스캐닝을. 지상 LiDAR 데이터로 보완되었지만 선명하지 않게. 통해 획득한 와형석조여래불의 데이터를 융합하여 3. 재현되었다.. 차원 재현 모델을 생성할 경우, 우수한 재현 정확도뿐. 둘째, UAS 및 CRP를 융합한 UC모델의 해석결과 재. 만 아니라 사각지대 및 옆면 재현이 선명해서 현실에. 현 정확도는 MAE 기준 [X:0.010m, Y:0.016m, Z:. 가장 근접한 3차원 재현이 가능함을 확인하였다. 또. 0.019m], RMSE 기준 [X:0.011m, Y:0.017m, Z:. 한, 이를 통해 ULC모델을 문화재 재현에 활용할 경우. 0.020m]으로 두 기준 지적경계오차 기준에 부합하게. 실세계 좌표기반으로 문화재에 담긴 역사적 고증까지. 생성되었지만, 국보·보물 건조물 문화재 정밀실측 지. 확인할 수 있어 천문학적 문화재 재현 및 복원에 그 활. 침 기준 1cm에는 부합하지 못했다. 또한, 무인항공촬. 용이 기대된다. 마지막으로 본 연구를 통해 고려시대. 영의 카메라 주사각 및 근접촬영 시 문화재에 직접적. 선조들의 불교 천문학적 지식 및 지혜가 상당한 수준. 으로 접근이 어려운 환경으로 인해 모델 내에 사각지. 이었음을 확인할 수 있었다.. 대가 발생하여 3차원 재현에 있어 다소 미흡한 부분이 확인되었다. 셋째, UAS, CRP 및 지상 LiDAR를 융합한 ULC모델. 참고문헌. References. 은 정확도가 MAE 기준 [X:0.005m, Y:0.004m, Z:. 강준오, 김달주, 한웅지, 이용창. 2018. 지상 LiDAR 및. 0.005m], RMSE 기준 [X:0.005m, Y:0.004m, Z:. UAS 기반 퇴적암벽의 3D 모델 구현. 대한공간정. 0.006m]으로 3가지 융합모델 중 외형에 대하여 가장. 보학회 학술대회:339-340.. 우수한 재현 했을 뿐만 아니라, 지적경계 오차 3cm 이. Kang JO, Kim DJ, Han WJ, Lee YC. 2018. Im-. 내와 국보·보물 건조물 문화재 정밀실측 지침 기준. plementing 3D Model of Sedimentary Rock. 1cm에 모두 부합한 결과로 재현 정확도 또한 가장 높. Wall Based on Ground LiDAR and UAS.. 았다. 또한, 무인항공영상 및 근접영상에서 발생한 와. 2018 Joint Fall Conference 339-340.. 120. 「지적과 국토정보」 제51권 제1호. 2021.
(11) UAS, CRP 및 지상 LiDAR 융합기반 와형석조여래불의 3차원 재현과 고증 연구. 고춘심. 2007. 운주사 연구. 박사학위논문. 전남대학교.. 공간객체의 측위 정확도 향상방안 연구. 한국측. Ko CS. 2007. A Study of Unju Temple[Thesis]. Chu. 량학회 학술대회:146-148.. nnam National University.. Uhm DY. 2016. A Study on Improving the Posi-. 김달주, 이용창. 2017. 석조물의 3차원 모델링을. tioning Accuracy of Spatial Objects Using the. 위한 3가지 RGB 영상의 조합 해석. 한국측량. Multi-angle Images of Rotary-wing Drone.. 학회 학술대회:239-241.. Korean Society of Surveying, Geodesy, Photo-. Kim DJ, Lee YC. 2017. Combination Analysis of Three Different Types of RGB Imagery for 3D. grammetry and Cartogaphy Conference 146148.. Modeling of Stonwork. Korean Society of. 오성종. 2020. UAS 및 지상 LiDAR 융합기반 문화재. Surveying, Geodesy, Photogrammetry and. 3D 재현과 고증에 관한 연구. 석사학위 논문. 인. Cartogaphy Conference:239-241.. 천대학교.. 김일권. 2014. 화순 운주사 북두칠성 원반석과 산정와. Oh SJ. 2020. A Study of 3D Reconstruction and. 불의 고려천문학. 한국학중앙연구원. 37(2):181-. Historical Evidence for Cultural Properties. 213.. Based on Convergence of UAS and Terrestrial. Kim IK. 2014. A Study of Historical Astronomy on. LiDAR[Thesis]. Incheon National University.. the Dipper Disc Stones and the Top Lying. 이동국, 유영걸, 이현직. 2017. 회전익 드론 및 3D 스캐. Buddha at Hwasoon Unju-Temple. The Aca-. 너를 통한 모델링 성과의 비교. 한국측량학회 학. demy of Korean Studies. 37(2):181-213.. 술대회:184-186.. 김창현. 2011. 고려시대 능성 운주사에 대한 탐색. 고 려대학교 역사연구소. 72:27-74.. Lee DK, You YG, Lee HJ. 2017. Comparison of Modeling Product using Rotary-wing Drone. Kim CH. 2011. A Study of Wunju Temple in. and 3D Scanner. Korean Society of Surveying,. Neungseong in Goryeo Dynasty. The Institute. Geodesy, Photogrammetry and Cartogaphy. for the Study of History. 72:27-74.. Conference:184-186.. 김태훈. 2018. 드론을 이용한 건축물의 공간정보 구축. 대한건축학회. 건축. 62(11):39-42.. 이석배. 2019. UAV와 LiDAR측량에 의한 목조문화재 의 재현. 대한공간정보학회지. 27(6):53-59.. Kim TH. 2018. Geospatial Information Construc-. Lee SB. 2019. Reproduction of Wooden Cultural. tion of Building Using Drone. Architectural. Heritage by UAV and LiDAR Surveying. Korea. Institute of Korea. Architecture. 62(11):39-42.. Spatial Information Society. 27(6):53-59.. 성지훈, 이원희. 2017. 저가형 UAV 영상의 영상향상 기법에 따른 결과 분석. 대한공간정보학회지. 25(3):3-12. Sung JH, Lee WH. 2017. Analysis of Low-Cost UAV Image using Image Enhancement Methods.. 이용창. 2017. UAS 영상기반 공간정보해석. 인천대학 교 도서출판부. Lee YC. 2017. Spatial Information Analysis Based. on UAS Images. Book Publishing Department of Incheon National University.. Korea Spatial Information Society. 25(3):3-12.. 이용창, 강준오. 2019. UAS 영상기반 문화유산물의. 엄대용. 2016. 회전익 드론의 다각도 영상을 이용한. 정밀 3차원 현상 모델링. 지적과 국토정보. 49(1): Journal of Cadastre & Land InformatiX Vol.51 No.1 (2021). 121.
(12) 오성종 ∙ 이용창. 85-101.. Information Society. 25(3):101-109.. Lee YC, Kang JO. 2019. The Precise Three Dimen-. 한승희, 강준오, 오성종, 이용창. 2018. UAS 및 지상. sional Phenomenon Modeling of the Cultural. LiDAR 융합기반 건축물의 3D 재현. 도시과학.. Heritage Based on UAS Imagery. Journal of. 7(2):53-60.. Cadastre & Land Informatix. 49(1):85-101. Han SH, Kang JO, Oh SJ, Lee YC. 2018. 3D. 이용창, 오성종. 2020. RTCM-SSR 보정요소 기반 1주. Reconstruction of Structure Fusion-Based on. 파 Multi-GNSS 실시간 측위의 효용성 평가. 지. UAS and Terrestrial LiDAR. Journal of Urban. 적과 국토정보. 50(1):107-123.. Science. 7(2):53-60.. Lee YC, Oh SJ. 2020. Availability Assessment of. 허의행, 이왈영. 2018. 유적탐색을 위한 드론과 항공사. Single Frequency Multi-GNSS Real Time. 진의 활용방안 연구. 국립문화재연구소. 51(2):. Positioning with the RTCM-State Space. 22-37.. Representation Parameters. Journal of Cada-. stre & Land Informatix. 50(1):107-123.. Heo EH, Lee WY. 2018. A Study on the Utilization of Drones and Aerial Photographs for Sear-. 이장존, 김재환, 이수예. 2017. 화순 운주사 마애여래. ching Ruins with a Focus on Topographic. 좌상의 암석학적 특성 및 손상도 평가. 보존과학. Analysis. Annual Review in Cultural Heritage. 회지. 33(1):1-10.. Studies. 51(2):22-37.. Lee JJ, Kim JH, Lee SY. 2017. Deterioration. Dameng Yin, Le Wang. 2019. Individual mangrove. Evaluation and Petrological Characteristics of. tree measurement using UAV-based LiDAR. the Rock‐carved Seated Buddha of Hwasun. data: Possibilities and challenges. Remote. Unju Temple, Korea. Journal of Conservation. Sensing of Environment. 223:34-49.. Science. 33(1):1-10.. Farid Javadnejad. 2017. Small Unmanned Aircraft. 이호진, 조기성. 2017. 문화재 3차원 모델링을 위한 지. System (UAS) for Engineering Inspections and. 상 LiDAR와 UAV 정확도 비교 연구. 지적과 국토. Geospatial Mapping[Thesis]. Oregon State. 정보. 47(1):179-190.. University.. Lee HJ, Cho KS. 2017. Comparative Accuracy of. Javier FL, Gabriel GA. 2016. Improving Archaeo-. Terrestrial LiDAR and Unmanned Aerial. logical Prospection Using Localized UAVs. Vehicles for 3D Modeling of Cultural Proper-. assisted Photogrammetry: An Example from. ties. Journal of Cadastre & Land Informatix.. the Roman Gold District of the Eria River. 47(1):179-190.. Valley. Journal of Archaeological Science. 5:. 한수희. 2017. 무인항공기를 이용한 고해상도, 고선명 영상의 촬영 및 고정밀 항공삼각측량. 대한공간 정보학회지. 25(3):101-109.. 509-520. Jakub L, Bohumír J, Jan K, Robert M. 2018. 3D reconstruction of an Abandoned Montane. Han SH. 2017. High-Resolution and High-Defini-. Reservoir Using UAV Photogrammetry, Aerial. tion Image Acquisition Using UAV and High-. LiDAR and Field Survey. Applied Geography.. Precision Aerial Triangulation. Korea Spatial. 98:9-21.. 122. 「지적과 국토정보」 제51권 제1호. 2021.
(13) UAS, CRP 및 지상 LiDAR 융합기반 와형석조여래불의 3차원 재현과 고증 연구. J.S. Pozo-Antonio, I. Puente, M.F.C. Pereira, C.S.A.. 소재부품 종합정보망. 2008. 이미지센서 (CCD,. Rocha. 2019. Quantification and Mapping of. CMOS). [인터넷]. [https://www.itfind.or.kr/. Deterioration Patterns on Granite Surfaces by. COMIN/file1174-%EC%9D%B4%EB%AF%B8. Means of Mobile LiDAR Data. Measurement.. %EC%A7%80%EC%84%BC%EC%84%9C.pdf].. 140:227-236.. 2021년 4월 8일 검색.. SW Kwon, JW Park, DY Moon, SW Jung, HS Park.. MCT-NET. 2008. Image Sensor (CCD, CMOS).. 2017. Smart Merging Method for Hybrid Point. [Internet]. [https://www.itfind.or.kr/COMIN/. Cloud Data Using UAV and LIDAR in Earth-. file1174-%EC%9D%B4%EB%AF%B8%EC%A7. work Construction. Creative Construction. %80%EC%84%BC%EC%84%9C.pdf].. Conference Primosten Croatia 19-22.. accessed 8 April 2021.. Last. YJ Park, JM Guldmann. 2019. Creating 3D city. 조선일보. 2019. “역사가 불탔다”... 노트르담 대성당. Models with Building Footprints and LIDAR. 화재에 숭례문 데자뷔. [인터넷]. [https://www.. Point Cloud Classification: A Machine Lear-. chosun.com/site/data/html_dir/2019/04/16/2. ning Approach, Computers, Environment and. 019041601152.html]. 2021년 3월 15일 검색.. Urban Systems. Article in Computers Environ-. Chosun Media. 2019. “History burned”... Sung-. ment and Urban Systems. 75:76–89.. nyemun déjà vu in Notre Dame Cathedral fire.. 운주사종합학술조사. 1991. 전남대학교 박물관.. [https://www.chosun.com/site/data/html_dir. Unju-Temple Comprehensive Academic Research.. /2019/04/16/2019041601152.html].. 1991. Museum in Chonnam National University. 과학동아. 2013. 숭례문 되살린 3D 레이저 스캔. [인 터넷]. [https://dl.dongascience.com/pdf/aView/ Science Donga. 2013. 3D Laser Scanning Revived Sungnyemun. [Internet]. [https://dl.dongaLast. accessed 13 March 2021. 국토지리정보원. 2018. 무인비행장치 이용 공공측량 작업지침 고시 제 2018-1075호. NGII. 2018. Establishment of Public Survey Work Instructions Using Unmanned Aerial Vehicle 2018-1075. 문화재청. 2014. 국보·보물 건조물 문화재 정밀실측 지침. Cultural Heritage Administration. 2014. Guidelines for Precise Measurement of National Treasures, Buildings and Cultural Properties.. accessed 15 March 2021. 애플. 2021. [인터넷]. [http://apple.com] 2021년 3 월 24일 검색. Apple. 2021. [Internet]. [http://apple.com] Last. S201305N028]. 2021년 3월 13일 검색.. science.com/pdf/aView/S201305N028].. Last. accessed 24 March 2021. 캐논. 2021. [인터넷]. [http://www.canon.co.uk]. 2021년 3월 25일 검색. Canon. 2021. [Internet]. [http://www.canon.co. uk]. Last accessed 25 March 2021. 디제이아이. 2021. [인터넷]. [http://www.dji.com]. 2021년 3월 24일 검색. DJI. 2021. [Internet]. [http://www.dji.com]. Last accessed 24 March 2021. 트림블. 2021. [인터넷]. [http://www.trimble.com]. 2021년 3월 25일 검색. Trimble. 2021. [Internet]. [http://www.trimble. com]. Last accessed 25 March 2021. Journal of Cadastre & Land InformatiX Vol.51 No.1 (2021). 123.
(14) 오성종 ∙ 이용창. 2021년 4월 15일 원고접수(Received) 2021년 6월 7일 1차심사(1st Reviewed) 2021년 6월 21일 2차심사(2nd Reviewed) 2021년 6월 28일 게재확정(Accepted). 초 록 최근, 2019년 4월 15일에 있었던 노트르담 대성당 화재로 문화재 복원 및 재현에 대해 2008년 숭례 문 화재사건 이후 관심이 다시 한 번 집중되고 있다. 특히, 기존에 활용되던 LiDAR 및 광파기 측량 등 을 활용한 문화재 실측을 다양한 3차원 재현 기술을 활용하여 복원 및 재현하려는 연구가 활발히 진 행되고 있다. 본 연구는 운주사의 와형석조여래불을 대상으로 최근 4차 산업혁명 시대에서 핵심기술 로 자리매김한 UAV(Unmanned Aerial Vehicle)의 무인항공영상와 기존에 사진측량에 활용되던 근접 영상(CRP) 및 지상 LiDAR 스캐닝을 활용하여 데이터를 획득하고, 이들을 3가지 융합모델로 SfM기반 의 3차원 재현을 실시, 모델의 재현도 및 정확도를 비교·분석하였다. 아울러, 3가지의 모델 중 가장 우 수한 융합모델을 활용하여 11세기 초 고려시대의 불교 천문학적 고증이 녹아있는 와형석조여래불을 실세계 좌표기반으로 북극성과의 연관성을 확인한다. 본 연구를 통해 문화재의 단순한 외형적인 3차 원 재현뿐 아니라 문화재에 담긴 역사적 고증을 확인함으로써 문화재의 종류 및 형태에 따라 고증까 지 함께 재현하는 방안을 모색하였다. 주요어 : 지상 LiDAR, UAS, CRP, 문화재, 3D 재현, SfM. 124. 「지적과 국토정보」 제51권 제1호. 2021.
(15)
수치


+2
관련 문서
This study was conducted to develop and evaluate the effects of a posture management program based on the theory of planned behavior (TPB) which was
this study analysed cast speed and solidification in thermal and flow perspectives and based on the results, conducted a confidence test on the high-speed general purpose
A study on galvanizing of Start-ups atmosphere based on Smart specialization and the entrepreneurial university - Technion institute of Technology, Hebrew University-.. Han, Jung
A Study on the Development of Ship’s Ballast Water A Study on the Development of Ship’s Ballast Water A Study on the Development of Ship’s Ballast Water A Study on the
1947, CIAM VI, Bridgwater, England, on Reconstruction of the Cities 1949, CIAM VII, Bergamo, Italy, on Art and Architecture 1951, CIAM VIII, Hoddesdon, England, on The Heart of
As the basis of the study, concept behind information communication technology was formed, and based on theoretical fundamentals of current internet use, ICT
A Contrastive Study on the Proverbs of Family Relationship of Korean and Chinese..
근래에 연구되는 격자형 모델은 각 경계범위에서 각기 다른 변수의 영향을 정확 하게 산출하지 못하고 있으나 , 수용모델링을 병행하는 경우 높은 정확도를 추정할
