논문 2012-49-11-18
GPS/INS센서 융합을 이용한 고 정밀 위치 추정에 관한 연구
( A Study of High Precision Position Estimator Using GPS/INS Sensor Fusion )
이 정 환*, 김 한 실***
( Jeongwhan Lee and Hansil Kim )
요 약
위치를 추적하기 위해 사용되는 대표적인 방법은 위성항법시스템(GPS)과 관성 항법장치(INS)이다. 위성항법장치는 어떤 한 지점에 대해 오차가 발생할 수 있으나 누적 오차가 없다는 장점이 있다. 위치 정보를 얻기 위해서 3개 이상의 위성으로부터 GPS정보를 수신하여야 하나 수신 강도가 약하거나 터널과 같은 수신 불능지역인 지역에서는 위성항법시스템의 정보를 획득할 수 없다는 단점이 있다. 관성항법장치의 경우 자이로스코프 및 가속도계의 정보를 이용하여 항체의 위치 및 자세 정보를 수Hz 부터 수백 Hz의 높은 데이터 송수신율로 속도 및 방향을 측정한다. 관성항법장치는 짧은 시간 동안 매우 정밀한 항법 성능을 나타내지만 가속도 및 각속도에서 속도성분으로 적분하는 과정에서 오차가 누적되어 시간이 경과함에 따라 항법 오차가 증가 하는 단점이 있다. 본 논문에서는 이 두 시스템의 단점을 상호 보완하여 위성항법장치와 관성항법장치의 위치 정보에 센서융 합 알고리즘 적용 및 실험을 통하여 성능분석을 하였다. 위성항법시스템의 수신 불능지역에서는 측정된 데이터를 SVD를 이용 하여 모델링한 후 위치 보정 알고리즘을 적용하여 위치 정보를 획득하는 실험 결과를 통해 확인한다.
Abstract
There are several ways such as GPS(Global Positioning System) and INS (Inertial Navigation System) to track the location of moving vehicle. The GPS has the advantages of having non-accumulative error even if it brings about errors.
In order to obtain the position information, we need to receive at least 3 satellites information. But, the weak point is that GPS is not useful when the 혠 signal is weak or it is in the incommunicable region such as tunnel. In the case of INS, the information of the position and posture of mobile with several Hz~several hundreds Hz data speed is recorded for velocity, direction. INS shows a very precise navigational performance for a short period, but it has the disadvantage of increasing velocity components because of the accumulated error during integration over time. In this paper, sensor fusion algorithm is applied to both of INS and GPS for the position information to overcome the drawbacks. The proposed system gets an accurate position information from experiment using SVD in a non-accessible GPS terrain.
Keywords :GPS(Global Positioning System), INS(Inertial Navigation System),
센서 융합(Sensor fusion), 칼만필터(Kalman filter), SVD(Singular Value Decomposition)
Ⅰ. 서 론
항법 기술의 대표적인 두 가지 방법으로 위성 항법
* 정회원, (주) 발레오전장시스템즈코리아 (Valeo R&D ELECTRONIC)
** 정회원, 울산대학교 전기공학부 (University of Ulsan)
※ 이 논문은 현대중공업 지원에 의한 울산대학교 전 기공학부 일류화 연구비에 의하여 연구되었음.
접수일자: 2012년2월16일, 수정완료일: 2012년10월9일
시스템(Global Positioning System, GPS)과 관성 항법 시스템(Inertial Navigation System, INS)이 있다. 이 두 가지 시스템을 결합한 연구가 활발히 진행되고 있다.
Xiaoying Kong[1]는 관성 항법 시스템(Inertial Navigation System, INS)에 저가형 관성 측정 장치 (Inertial Measurement Unit, INS)의 쿼터니언 (Quaternion) 모델 알고리즘을 적용하여 위성 항법 시 스템(Global Positioning System, GPS)결합하였다.
Huiling Tan[2]는 저가형 위성 항법 시스템(Global
(801)
Positioning System, GPS)과 관성 측정 장치(Inertial Measurement Unit, INS)의 약 결합(Loosely coupled system)하였으며 고 정밀 NovAtel사의 GPS(OEM-4) 를 기준으로 비교하여 성능확인을 하였다.
Johan Bijker[3]는 확장 칼만 필터(Extended Kalman Filters, EKF)를 두 번 사용하였으며 위성 항법 시스템 (Global Positioning System, GPS)과 관성 항법 시스템 (Inertial Navigation System, INS)을 약 결합(Loosely coupled system)하였다.
EKF를 두 번 사용한 이유는 첫 번째 EKF는 mobile 의 자세를 추정하고 두 번째 EKF는 속도와 위치를 추 정하는데 사용되었다.
Gert F. Trommer[4]는 위성 항법 시스템(Global Positioning System, GPS)와 관성 항법 시스템(Inertial Navigation System, INS)의 결합과정을 강 결합 (Tightly coupled system)을 사용하였는데 이러한 이유 는 강 결합에서 GPS의 의사 거리[pseudo-range]정보를 사용하여 GPS의 위치 및 속도 정보를 처리하는 것이며 약 결합(Loosely coupled system)보다 우수하다는 것을 확인되었다.
Zhi Shen[5]는 기존의 Kalman-Filter가 아닌 Kalman Filter/Fast Orthogonal Search(FOS)를 사용하였으며 Kalman Filter는 선형적 오류 모델을 다룰 수 없기 때 문에 FOS를 사용하여 고 정밀 GPS를 참고하여 성능확 인 하였다.
그 이외에 A. Ndjeng Ndjeng[6]는 위성 항법 시스템 (Global Positioning System, GPS)과 관성 측정 장치 (Inertial Measurement Unit, INS)에 약 결합(Loosely coupled system)하였으며 위성 항법 시스템(Global Positioning System, GPS)이 수신 불능지역일 때 주행 거리 측정 장치(Digital map)을 사용하여 보정하였다.
또한, 심덕선[7]은 강결합 및 초강결합 시스템에 대한 성능비교 분석에 대한 연구가 진행되었다.
관성 항법 시스템(Inertial Navigation System, INS) 은 짧은 기간에 대한 오차는 작으나 센서에서 얻은 가 속도 값을 적분하기 때문에 시간이 지날수록 오차가 누 적되는 특성이 있다. 또한 GPS 수신 불능 지역일 경우 주행거리 측정 장치(Digital map)등의 다른 센서[8]를 사 용하였으나 본 논문에서는 GPS수신 불능지역에서 SVD(Singular Value Decomposition)[9]를 사용하여 데 이터 모델링하여 보정하며 고 정밀 위치를 추적한다.
관성 측정 장치와 위성항법시스템의 데이터 형식이 다르므로 방향코사인행렬(Direction Cosine Matrix,
DCM)를 사용하여 동기화[10~[11]하며 관성 측정 장치의 오차 누적을 상쇄할 수 있도록 칼만필터로 구현한다.
본 논문에서는 기존의 방법을 개선하기 위해 저가형 GPS와 INS 각각의 센서를 단독 및 센서융합(Sensor Fusion)에 칼만필터를 사용하여 고 정밀 NovAtel사의 GPS(ProPak-G2)와 비교하면서 실험하였다. 기존 시스 템은 GPS 나 INS의 단독으로 사용함으로써 위치정보 오차가 큰 단점이 있었다. GPS/INS 융합시스템을 고려 하여 결합한 시스템도 있지만 두 센서의 sampling time 의 차이에 따른 처리에 의한 시스템 구현이 쉽지 않지 만 제안된 시스템은 GPS불능지역에서도 INS정보를 얻 어 SVD 알고리즘을 적용하여 정확한 위치정보를 얻을 수 있었다. 본론에 앞서 Ⅱ장에서는 본 논문에 사용된 알고리즘에 대하여 설명한다. 또한 Ⅲ장에서는 실험 환 경과 각 센서에 대한 실험 및 알고리즘 적용에 대한 성 능분석에 대한 결과에 대해 설명하고 Ⅳ장에서 결론으 로 마무리를 맺는다.
Ⅱ. 본 론
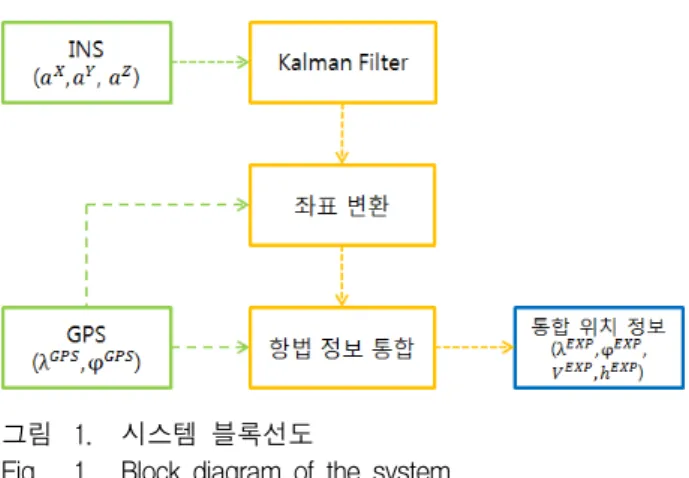
본 논문의 시스템의 블록선도는 다음과 같다.
그림 1. 시스템 블록선도
Fig. 1. Block diagram of the system.
1. 방향코사인 행렬(DCM)
위성 항법 시스템(Global Positioning System, GPS) 과 관성 항법 시스템(Inertial Measurement Unit, INS) 은 각각 다른 좌표계의 형식으로 구성되어 있다. GPS 의 경우는 항법좌표계(Navigation frame, N-frame)로 구성되어 있으며 INS는 오일러 각도에 롤(Roll), 피치 (Pitch), 헤딩(Heading)의 항법좌표계이며 가속도 성분 은 동체좌표계(Body frame, B-frame)로 구성되어 있다.
방향코사인행렬(Direction Cosine Matrix, DCM)을 사 용하여 좌표계를 변환한다.
(802)
항법 좌표계에서 동체 좌표계로의 방향코사인행렬 (DCM)은 식 (1)과 같다[10].
(1)
여기서,
,
,
는 각각 오일러 각도의 Roll, Pitch, Heading방향을 나타낸다. 직교성인 동체 좌표계에서 항 법 좌표계로의 방향코사인행렬(DCM)은 다음 식 (2)와 같이 나타낼 수 있다[10~11].
(2)
여기서 s와 c는 sin과 cos의 간략화 표시이다.2. 칼만필터
칼만필터는 상태변수(
)의 최적 추정치(
)를 구하 는 방법으로 상태변수의 오차분산
의 최적화 필터이다. 예측(Prediction)과 보정 (Correction) 과정으로 구분되며 다음 그림과 같이 나타 낼 수 있다[12].
그림 2. 칼만필터 알고리즘 Fig. 2. Kalman Filter Algorithm.
3. Hankel Matrix를 이용한 SVD
GPS 신호 불능지역일 경우는 데이터를 획득할 수 없 기에 다음과 같은 알고리즘을 사용한다. 우선 GPS의 불능지역 전까지의 입력 데이터 모델링이 필요하다.
SVD 알고리즘을 사용하기 위하여 입력 값을 다음과 같은 Hankel Matrix 형식으로 변환하였다.
그림 3. 입력데이터의 Hankel Matrix 변환
Fig. 3. Conversion of the input data Hankel Matrix.
이 방법을 GPS Hankel Matrix변환 수식으로 나타내 면 다음과 같다.
(3)
여기서 유일 해를 가지지 못하는 Ill-posed Problem 을 예방하기 위하여 Ill-posed Problem 해결을 위한 전 치행렬 계산식 (4)와 SVD의 기본식 (5)를 사용한다. ′
(4)
∑
(5)
구해진 행렬 H를 SVD 알고리즘을 이용하여 모델링 한다. 식 (6)은 를 구하기 위한 식이다.
(6)
(803)
식 (6)에서 구해진 는 식 (5)의 ∑ 의 3근 이 된다.
따라서
∑
는 식 (7)으로 나타낼 수 있다.∑
(7)
또한 식(8)를 사용하여 V, U를 구할 수 있다.
(8)
위에서 구한 ∑ 과 다음 식 (9)와 (10)을 통해 모델링이 가능하다.
∑ ∑ ×
×
∑ ×
×
(9)
↑
(10)
모델링을 위한 입출력 관계식이 다음과 같을 때, 모 델링 계수를 구하기 위한 식 (11)로 나타낼 수 있다.
∑
↑∑
∑
의 첫번째 행과 와 곱
의 첫번째 열과∑
의 곱
(11)
(3)∼(11)을 사용하여 식 (12)와 같이 입력과 출력의 관계식으로 나타낼 수 있다.
× ×
×
(12)
식 (12)에서 는 현재 위치이며 는 다음 위치 로 A, B, C값을 알고 의위치 즉 현재위치를 알고 있기 때문에 을 알 수 있다. 현재 위치 정보를 통 하여 다음 위치를 예측할 수 있다. 과 는 각각
북쪽 자오선 방향과 동쪽 방향 곡률의 반경으로 식 (13)과 (14)와 같이 나타낼 수 있다. 여기서 과 정보를 식 (16)에 대입하여 GPS불능 지역일 경우 사용 한다[13].
(13)
(14)
여기서 a, b와 e는 각각 지구 타원의 장축, 단축 그리 고 식 (15)와 같이 이심률 e 를 나타낸다.
(15)
× ∆
∆
(16)
Ⅲ. 실 험 및 결과
1. 실험 환경 및 방법
실험에 사용된 장비는 Novatel사의 ProPak-G2 1set, Uigoods사의 Smart GPS 1set, 그리고 3축 가속도 및 자이로 정보를 포함하고 있는 Micro infinity사의 INS 를 사용하였다. 그림 4는 실험 장비를 장착한 차량의 주행장면이며 그림 5는 실험 데이터 획득 장면이다. 실 험방법은 400m트랙에서 전기자동차를 이용하여 실험하 였으며 고정된 지점에서 Novatel 및 Uigoods사의 GPS 수신 data를 바탕으로 GPS 정밀도를 측정하였다.
그림 4. 실험 주행 중인 장면 Fig. 4. Running of experiment.
(804)
그림 5. 데이터 측정 장면
Fig. 5. Data measurement monitoring.
또한, GPS수신 불능지역에서의 성능확인을 위해 불 능지역을 두 곳이 포함된 지역을 선정하여 실험 및 시 뮬레이션을 통해 확인하였다.
2. 실험 및 시뮬레이션 결과
그림 6 및 그림 7은 정밀도가 높은 ProPak-G2 GPS 와 정밀도가 낮은 저가형 Smart GPS를 이용하여 한 지점에서의 정밀도를 측정한 것이다.
그림 6. ProPak-G2 GPS 정밀도 Fig. 6. Precision of ProPak-G2 GPS.
그림 7. Smart GPS 정밀도 Fig. 7. Precision of smart GPS.
그림 8. Gyro센서 Roll 가속도의 출력파형
Fig. 8. Gyro Roll-axis acceleration output waveform.
정지된 지점에서 그림 6은 Novatel사의 ProPak-G2 의 정밀도, 그림 7은 Uigoods사의 Smart GPS의 정밀 도를 측정한 결과 각각 9.8cm와 1.5m의 오차를 보였다.
이와 같은 GPS가 제공하는 정밀도를 바탕으로 저가형 Smart GPS와 INS를 결합하여 고가형 Novatel사의
그림 9. Roll 가속도의 필터 적용 후 출력파형
Fig. 9. Roll acceleration waveform applied Kalman-filter.
그림 10. Roll 속도 출력파형 Fig. 10. Roll velocity waveform.
그림 11. INS의 오차누적 Fig. 11. INS cumulative error.
(805)
그림 12. 필터 적용후의 INS의 오차누적 Fig. 12. INS cumulative error after filter.
그림 13. 센서융합 알고리즘 결과
Fig. 13. The result of Sensor fusion algorithm.
그림 14. 확대한 센서융합 알고리즘 결과 Fig. 14. Zoom in Sensor fusion algorithm.
ProPak-G2를 기준으로 성능을 비교 분석하였다.
실험에 사용된 센서는 3축 가속도 및 자이로 정보를 포함하고 있는 Micro infinity사의 INS를 사용하였으며 그림 8은 Gyro센서 Roll 가속도의 raw data이며 그림 9 는 칼만필터를 적용하여 노이즈를 제거한 출력파형이 다. 그림 10은 Gyro센서의 Roll 속도 파형이다.
그림 11은 INS와 GPS의 시간에 따른 위도와 경도의 오차 누적을 나타낸 것으로 시간이 지날수록 INS의 오
그림 15. SVD 적용전의 실험결과
Fig. 15. The result before SVD application.
그림 16. SVD 적용후의 실험결과 Fig. 16. The result after SVD application.
차 누적이 발생되는 것을 알 수 있었다. 그림 12에서 칼 만필터를 적용하여 INS 오차 누적이 상쇄되어 INS 오 차 누적이 많이 줄어든 것을 확인할 수 있었다.
그림 13은 동등조건에서 각각의 센서들을 실험한 것 으로 기존시스템과 센서융합 알고리즘의 결과를 비교한 것이며 그림 14와 같이 확대하였다. ①은 INS, ②는 저 가형 GPS의 data, ③은 본 과제에서 적용된 알고리즘 을 결합한 것으로 ④의 고가형 GPS data와 비교하였다.
센서 융합 알고리즘 적용결과 기존의 GPS나 INS센 서를 단독으로 사용했을 경우보다 더욱 정밀한 위치 정 보를 획득할 수 있다는 것을 실험을 통해 확인할 수 있 었다.
그림 13은 불능지역에서는 GPS정보 없이 INS정보 (점선)만으로 측정한 것으로 원래 Map의 결과값 (실선) 과 비교하면 많은 오차가 발생하는 것을 알 수 있었다.
하지만 그림 15는 그림 14와 같은 GPS 불능지역에서도 SVD 알고리즘을 적용하여 측정한 결과 (점선) 원래
(806)
Map의 결과값 (실선)과 비교하면 거의 오차가 없음을 보여준다.
Ⅳ. 결 론
본 논문은 고 정밀 위치 획득을 위한 GPS/INS 센서 융합에 관한 연구로 다음과 같은 방법을 제시하였다.
Simulation 결과 고 정밀 GPS(NovAtel GPS)를 기준 으로 저가형 GPS(Smart GPS)와 INS 센서를 단독으 로 사용했을 경우보다 본 논문에서는 제시된 알고리즘 및 방법을 적용하여 실제 도로 주행 실험을 바탕으로 두 센서를 결합했을 경우 위치정보를 비교한 결과 더 정밀한 위치 정보를 획득한 것을 실험을 통하여 확인 하였다.
기존의 위치정보 획득시스템인 GPS와 INS를 비교하 였을 경우 본 논문에서 제시하는 GPS와 INS 결합 시 스템은 위치정보 향상뿐만 아니라 GPS 수신 불능지역 에서도 GPS정보를 INS 정보와 결합하여 위치정보를 계산할 수 있고 또한 1m 급 이내로 위치 정도를 획득 할 수 있다는 점이다.
그리고 경제적 뿐만 아니라 정확도를 고려하여 사용 자의 요구사항에 부합하는 시스템을 선정할 수 있는 장 점이 있다.
향후는 저가형 GPS와 INS 그리고 다른 센서를 보정 하여 고 정밀 위치 획득하는 것과 본 논문에서 사용한 방향코사인행렬(Direction Cosine Matrix, DCM)이외에 쿼터니언(Quaternion)방법을 사용하여 센서 융합하는 것이다. 또한, 차후에 항법시스템에도 적용이 가능할 것 이다.
참 고 문 헌
[1] Xiaoying Kong, “INS algorithm using quaternion model for low cost INS”, Robotics and Autonomous Systems 46 (2004) 221–246.
[2] Huiling Tan, “Measurement of stride parameters using a wearable GPS and inertial measurement unit”, Journal of Biomechanics 41 (2008) 1398–
1406.
[3] Johan Bijker, “Kalman filter configurations for a low-cost loosely integrated inertial navigation system on an airship”, Control Engineering Practice 16 (2008) 1509– 1518.
[4] Gert F. Trommer, “Tightly coupled GPS/INS integration for missile applications”, Aerospace
Science and Technology 8 (2004) 627–634.
[5] Zhi Shen, “Low cost two dimension navigation using an augmented Kalman filter/Fast Orthogonal Search module for the integration of reduced inertial sensor system and Global Positioning System”, Transportation Research Part C 19 (2011) 1111–1132.
[6] A. Ndjeng Ndjeng, “Collision avoidance support in roads with lateral and longitudinal maneuver prediction by fusing GPS/INS and digital maps”, Information Fusion 12 (2011) 264–274.
[7] 조영석, 양철관, 박진우, 심덕선, “GPS/INS 강결합 및 초강결합 시스템에 대한 EKF와 UKF 성능비 교”, 대한전자공학회 하계종합학술대회, 제30권, 1 호, 947∼948쪽, 2007년 7월.
[8] 김지용, 이지홍, 변재민, 김성훈, “경사도로에서 다 중 센서를 이용한 이동로봇의 위치추정 성능 개 선”, 대한전자공학회 논문지, 제47권 SC편, 제1호, 67∼75쪽, 2010년 1월.
[9] 윤정혜, 정성환, “특이값 분해 성분의 특성을 이용 한 효과적인 워터마킹 연구”, 한국정보과학회 학술 심포지옴 논문집, 제1권, 1호, 25∼30쪽, 2004년 6 월.
[10] E. H. Shin, Accuracy Improvement of Low Cost INS/GPS for Land Application, MS Thesis, University of Galgary, Cnanda, December 2001.
[11] John J. Craig, “Introduction to Robotics”, Prentice Hall, 2007.
[12] 김성필, “MATLAB활용 칼만필터의 이해”, 아진출 판사, pp39∼71 September 2010.
[13] P. D. Groves, Principles of GNSS, Inertial, and Multisensor Intergrated Navigation System, Artech house, 2007.
(807)
저 자 소 개 이 정 환(정회원)
2010년 울산대학교 전기공학부 공학사
2012년 울산대학교 전기공학부 공학석사.
2012년~현재 ㈜ 발레오 근무
<주관심분야: 센서고장진단, GPS 및 INS응용>
김 한 실(정회원)
1981년 서울대학교 전기공학과 (공학사)
1983년 서울대학교전기공학과 (공학석사)
1991년 West Virginia Univ.
Electrical & Computer Eng. (공학박사) 1993년~현재 울산대학교 전기공학부 교수.
<주관심분야 : 선형 및 비선형 제어, 확률제어, H infinity, GPS 응용>
(808)