접수일자: 2013년 2월 26일 심사(수정)일자: 2013년 12월 4일 게재확정일자 : 2013년 12월 6일
†Corresponding author
본 논문은 한국학술진흥재단 기초연구지원사업 (KRF –313-2008–2-D00329)에서 지원하여 연구하였음.
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0) which permits un- restricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
불확실한 pure-feedback 비선형 계통에 대한 출력 궤환 적응 신경망 제어기
Adaptive Output-feedback Neural Control of uncertain pure-feedback nonlinear systems
박장현․김성환†․장영학․유영재
Jang-Hyun Park, Seong-Hwan Kim†, Young-Hak Jang, and Young-Jae Ryoo 목포대학교 제어로봇공학과
†Dept. of Control Engineering and Robotics, Mokpo National University
요 약
본 논문은 불확실한 연속시 단일입력 단일출력 pure-feedback 비선형 계통에 대해서 참고문헌 [15]에서 제안된 상태변수 궤환 적응 신경망 제어 알고리듬을 바탕으로 출력만이 측정 가능한 계통에 적용할 수 있는 출력 궤환 제어기를 제시한다. 고려하는 계통에 대 한 출력 궤환 적응 신경망 제어기는 이 분야에서 아직까지 어느 문헌에서도 다루지 않은 주제이다. 제안된 출력 궤환 제어기는 백스 테핑을 회피하여 상대적으로 간결한 제어 규칙과 단 하나의 신경망만이 사용된다는 [15]의 장점을 그대로 계승하며 적용되는 비선형 계통의 범주를 더 넓힌다는 의미를 가진다.
키워드 : Pure-Feedback 비선형 계통, 적응 신경망 제어기, 출력 궤환 제어 Abstract
Based on the state-feedback adaptive neuro-control algorithm for a SISO nonaffine pure-feedback nonlinear system proposed in [15], an output-feedback controller is proposed in this paper. The output-feedback adaptive neural-net controller for the considered nonlinear system has not been previously proposed in any other literatures yet. The proposed output-feedback controller inherits all the advantages of [15] such that it does not adopt backstepping and this results in relatively simple control and adapting laws. Only one neural network is required for the proposed adaptive controller. The proposed neural-net control scheme expands the applicable class of nonlinear systems.
Key Words : Pure-Feedback Nonlinear System, Adaptive Neural Controller, Output-Feedback Control
1. 서 론
불확실한 비선형 계통에 대한 제어 이론은 꾸준히 발전 해 오고 있는데 이것은 현대의 제어대상 계통은 점점 더 고 도로 복잡해지고 있다는 사실에 기인한다. 이러한 계통에 대해서 수학적인 모델식을 세우는 것조차도 난해한 경우가 많으며, 잘못 모델링되거나 간략화된 모델식에는 필연적으 로 실제 계통과는 다른 비구조화된 불확실성이 내포되게 마 련이다. 그러한 경우에 적절히 대응하기 위해서 신경망을
제어기에 도입하는 지능 제어 이론이 활발하게 연구되어 왔 다.[1-20,23-25]
본 저자들은 음과 같은 불확실한 pure- feedback 비선형 계통의 상태변수 궤환 적응 신경망 제어기를 [15]에서 제안 한 바 있다.
(1)
여기서 는 미지의 평활 함수이고, , 은
상태 변수이며, , 이다. 그리고 는 이
계통의 출력이다. 이러한 pure-feedback 비선형 계통은 기
존에 고려되던 계통에 비해 더 일반적인 계통이며 가상 제
어 항으로 쓰일 상태 변수와 제어 입력이 모든 식에서 음함
수형태로 나타나는 비어파인(nonaffine) 계통이다. 참고문헌
[15]에서 제안된 제어기가 유사한 계통을 다루는 기존의 논
문들[16-20]에서 제안된 기법들에 대해서 갖는 장점은 다음
과 같다. 첫째로 제어식을 과도하게 복잡하게 만드는 백스
테핑(backstepping)을 기반으로 하지 않는다는 점이고 둘째
로 개에서 많게는 개의 신경망을 사용하는 기존의 방법
들과 달리 [15]에서는 단 하나의 신경망 근사기만 사용된다 는 점이다.
하지만, [15]에서는 모든 상태변수가 관측가능하다는 가 정 하에 상태변수궤환 제어기만을 제안하고 있으며, 실제 계통은 출력이나 상태변수 중 일부만 측정이 가능한 경우가 많으므로 실용적인 관점에서는 출력궤환 제어기가 더 바람 직하다. 본 논문에서는 [15]의 제어기법을 기반으로 그 장 점을 그대로 가지는 출력궤환 적응 신경망 제어기를 제시한 다. 본 논문에서 제안하는 연속시 계통식 (1)에 대한 출력 궤환 신경망 적응 제어 알고리듬은 현재까지의 어떠한 연구 결과에서도 다루지 않은 내용이다.
2. 문제 정의
본 논문에서는 계통식 (1)의 출력만이 측정 가능하다 고 가정한다. 또한 제어대상 계통식 (1)이 가제어성을 가지기 위해서 다음과 같은 가정이 필요하다.
가정 1 . 유계인 폐집합 에서 계통식 (1) 에 대해 다음 부등식이 성립한다.
,
(2)
제어목적은 출력 가 원하는 출력 를 추종하고 계통 의 모든 신호가 유계이도록 하는 것이다. 만약 새로운 상태
변수를 로 정의하면 에 대해서
다음이 성립한다.
(3)
여기서 , , 이고
(4)
이다. 이 상태변수에 대해서 계통식 (1)은 다음과 같은 정규식으로 재기술될 수 있다.
(5)
여기서 , 이다. 식 (5)의 유도는
[15]에 제시되어 있다. [15]과의 차이점은 본 논문에서 는 원 상태변수벡터 가 측정 불가이고 오직 출력 만이 측정 가능하다는 것이다. 상태 변수 는 뒤에서 소개될 신경망의 입력으로 사용되나 이것을 새로운 상 태 변수 벡터로 대체하기 위해서 다음의 보조정리가 필 요하다.
보조정리 1 : 벡터 이라고 정의하면
를 만족시키는 벡터 함수 가
존재한다.
증명: 먼저 첫 번째 단계로 임은 자
명하다. 식 (3)에서 이므로 가
정 1과 음함수 정리(implicit function theorem)에 의하면 다음을 만족시키는 함수 가 존재한다.
(6)
이렇게 순차적으로 모든 에 대해서
를 만족하는 가 존재함을 수학적 귀 납법으로 쉽게 증명할 수 있으며 벡터함수 를 아래와 같이 정의한다.
(7)
보조정리 1은 원 상태변수 벡터가 새로 정의된 상태변수 벡터의 함수라는 것을 증명한 것으로 출력 궤환 제어식을 구성할 수 있는 단서를 제공한다.
3. 출력 궤환 제어식 설계
3.1 이상적인 제어식
본 절에서는 모든 상태 변수가 측정 가능이고 계통에 불 확실성이 존재하지 않는다고 가정하여 이상적인 제어식을 도출한다. 이러한 이상적인 제어식으로부터 출발하여 측정 불가능한 상태변수는 관측기(observer)의 추정치로, 미지 함수는 신경망의 근사치로 대치하게 될 것이다. 이후에 이 것에 기인한 불확실성이 안정도에 어떻게 영향을 미치는지 알아보고 이를 상쇄하는 제어식과 적응 법칙을 순차적으로 유도하겠다.
먼저 출력 벡터 , 추종 오차 벡터 , 그리고 필터 링된 추종 오차 를 다음과 같이 결정한다.
(8)
여기서 은 설계 상수이며
이다. 필터링된 신 호 의 시간 도함수는 다음과 같다.
(9)
여기서 이다.
보조정리 2: 만약 가정 1이 성립한다면, 다음 등식을
만족하는 유일한 함수 가 존재한다
(10)
여기서 은 입력 이득으로서 설계 상수이다.
보조정리 2의 증명은 [15]에 제시되어 있으며 가정 1이
성립한다면 음함수 정리에 의해서 (10)을 만족시키는 함수
가 존재함을 보이고 있다. 이것으로부터 이상적인 제
어항 가 리아푸노프(Lyapunov) 함수 를 점근
적으로 안정시킨다는 사실을 알 수 있으며 가 유계이면 추종오차벡터 가 유계임은 [21]의 7.1.1절에 증명되어 있 다. 본 논문에서는 다음과 같이 이상적인 제어항을 재배열 한다.
(11)
여기서 이다. 이와 같은 재배열은 선형제어
항 가 제어 입력에서 표면적으로 나타나 그 기능을 수행토록 하기 위함이며 신경망으로의 입력 에 가 포함되어 있으므로 신경망의 구성이나 안정도 증명에는 영향을 끼치지 않는다.
본 논문에서는 하나의 신경망을 이용하여 미지의 함수 를 근사화하는데, 주지할 사실은 입력 벡터 는 측정불 가이므로 이후에 추정치로 대신한다는 점이다. 또한 는 미지의 함수이므로 이것을 신경망으로 대치하게 된다.
이후에는 벡터 의 2-노옴(2-norm)을 로 표기한다.
3.2 고이득 관측기
출력변수 을 제외한 나머지 변수들 (
)는 계산이 불가능하므로 이들을 관측하기 위해 서 본 논문에서는 고이득 관측기 (high-gain observer, HGO)를 도입한다.[22] 이후에 관측기에서 얻어진 추정값들 을 이상적인 제어식에 대입하게 된다.
보조정리 3 : 출력 와 그 차 시간 도함수가 유계라고 가정하고 다음과 같은 선형 계통을 고려한다.
(12)
여기서 은 양의 설계상수이다. 만약 선형 계통식 (12)
의 마지막 식의 계수들 을 에 대한 다항
식 이 Hurwitz 다항식
이 되도록 선정하면 다음 부등식 (13)이 모든 에 대해서 성립하는 양의 상수 와 가 존재한다.
(13)
위의 보조정리 3의 증명은 [22]에서 찾아 볼 수 있다.
이제 필터링된 추종오차 를 다음과 같이 정의한다.
(14) (15)
정의식들 (13)-(15)를 이용하여 신경망에 인가되는 실
제 입력은 으로 결정하며 이 벡터의
크기는 으로 표기한다.
3.3 RBF 신경망
본 논문에서는 식 (11)의 미지의 함수 을 근사화 하기 위해서 RBFN(radial-basis function network)을 이용 한다. 일반적으로 다입력 단일출력 RBFN의 출력식은 다음
과 같이 기술할 수 있다.
(16)
여기서 은 RBFN의 출력, 은 가변
파라메터 벡터, 은 입력의 비선형
함수벡터이다. 그리고 은 RBF의 개수를 나타낸다. 벡
터 의 번째 요소 , 는 은닉층의 번
째 뉴런과 출력노드와의 연결강도이며 은 다음과 같은 가우시안 함수를 요소로 가지는 함수벡터이다.
(17)
여기서 은 번째 기저함수의 중심을 나타내는
벡터이고 는 그 기울기를 나타낸다.
정리 1 : (범용 근사화 이론) 유계인 폐집합
에서 정의된 연속인 실함수 와 임의의 실수
에 대해서 부등식 (18)을 만족시키는 최적의 가중치 벡터 가 존재한다.[26]
(18)
정리 1에서 는 최적의 파라메터에 대해서도 구조 적인 결핍으로 인해 불가피하게 내재하는 재구성 오차 (reconstruction error)를 나타내며 일반적으로 신경망의 은닉층 노드수가 많아진다면 는 작아진다. 본 논문 에서 이 후 의 추정치를 로 표기한다.
그림 1. RBFN의 구조 Fig. 1. Structure of RBFN
3.4 전체 출력 궤환 제어계의 안정도 증명
보조정리 1을 이용하면 보조정리 2에서의 이상적인 제어 항을 다음과 같이 , , 의 함수로 재정의할 수 있다.
(19)
그리고 신경망으로의 이상적인 입력 벡터를
와 같이 정의하면 신경망의 출력은 미지의 함수 을 근사화한다고 할 수 있다.
최종적인 출력 궤환 제어 입력과 신경망 가중치 갱신 법
칙은 다음 식 (20)과 (21)이다.
(20) (21)
여기서 는 양의 학습률(learning rate)이고 는 양의
설계상수이며 상수 는 를 만족시키는 최소
상수이다. 이 학습법칙 (21)은 스위칭- 항의 작용으로 임을 보장하며 그 증명은 [15]의 보조정리 2에 제시되어 있다.
정리 2 : 가정 1을 만족하는 계통식 (1)과 제어기 (20), HGO (12)와 적응 법칙 (21)로 이루어진 출력 궤환 적응 제 어 시스템을 고려하자. 이 계통의 필터링된 추종 오차 는 semi-global uniform ultimate boundedness 특성을 갖는 다.
증명 : 리아프노브 함수를 으로 선정하고 그 시간 도함수를 보조정리 2를 이용하여 유도하면 다음과 같다.
(22)
계통식 (1)의 모든 미지함수 ( )는 평활함수이 므로 미지함수 도 역시 평활함수다. 따라서 충분히 큰
임의의 유계 폐집합 에서도 연속함수이며 에
대한 도함수 도 역시 존재하고 연속이다. 이러한 가정 이 만족되면 참고문헌 [27]의 2.2절에 기술된 Lemma 2.2에 의해서 는 에서 에 대해 locally Lipschitz이다.
따라서 어떤 Lipschitz 상수 에 대해서 다음의 Lipschitz 부등식 (23)를 만족시킨다.
(23)
이 부등식을 이용하여 (22)를 더 전개하면 다음과 같다.
(24)
여기서 , 이다. 이 결과는
가 다음과 같은 집합에 대해 불변(invariant)하다는 것 을 보장하며
(25)
이 집합의 반경은 관측기의 설계 상수 과 제어기의 이득
를 조절함으로서 충분히 작게 할 수 있다.
참고 문헌 [15]에서 제안된 상태 변수 궤환 제어기와 본 논문의 출력 궤환 제어기의 구조적인 차이점은 신경망의 입 력이 전자는 계통의 상태 변수 벡터 이고 후자는 출력의
미분 벡터의 추정치 이라는 점이다. 따라서 [15]에서는 신 경망을 학습시키는데 모든 상태 변수값이 필요했으나 본 논 문에서는 단순히 출력 변수만이 사용된다는 점이 가장 큰 차이점이며 이로서 적용 가능한 계통의 범주가 더 넓어졌다 고 할 수 있다.
그림 2에 제안된 출력 궤환 적응 신경망 제어계의 전체 블록다이어그램을 도시하였다.
그림 2. 제안된 제어계의 전체 계통도 Fig. 2. Block diagram of proposed control system
4. 결과 고찰 및 모의실험
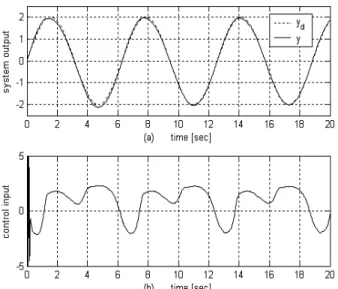
제안된 적응 신경망 제어기의 성능을 보이기 위해서 다 음과 같은 비선형계통에 대해서 모의실험을 수행한다.
(26)
계통 (26)은 완전궤환 계통이며 가정 1을 만족함을 쉽게 확 인할 수 있다. 원하는 출력은 이다. 예제 계 통의 차수가 2차이기 때문에 다음과 같은 2차 HGO를 사용 한다.
(27)
여기서 설계상수는 , 로 선정하였다.
RBFN의 입력변수 , , , 에 대한 RBF의 수는 각각 4, 4, 2, 2개로 선정하였고 중심과 기울기는 (-2.9, -0.9, 1.1, 3.1; 2), (-3 -1 1 3; 2), (-4.75 5.25; 10), (-6.8 3.2; 10)으로 결정하였다. 따라서 총 뉴런의 개수는 64개이 다. 이러한 RBFN의 파라메터들은 몇 번의 사전 모의실험 을 수행하고 해당 변수들의 범위를 확인한 후 그것을 포함 하도록 시행착오적으로 결정된 것이다.
제어기 상수는 , , , 로 선정하
였다. 초기 상태변수는 이고 HGO와 신경
망 가중치의 초기 변수 값은 모두 0으로 하였다. 모의실험
결과는 그림 3-4에 도시하였다. 이 결과로부터 제안된 출력
궤환 제어기가 상태 변수 궤환 제어기와 거의 유사한 성능
을 보임을 알 수 있다.
그림 3. (a) 계통의 출력과 원하는 출력, (b) 제어입력 Fig. 3. (a) System ouput and desired output, (b) control
input
그림 4. 의 궤적 Fig.
4.Trajectory of
5. 결론
본 논문에서는 불확실한 단일 입력 단일 출력 pure-feedback 비선형 계통에 대한 출력 궤환 적응 신경망 제어기를 제안하였다. 참고문헌 [15]에서 제안된 상태변수 궤환 제어식을 출력 궤환의 경우로 확장하여 그 장점은 그 대로 가지면서 적용 가능한 계통의 범위는 더욱 넓히게 되 었다. 제안된 출력 궤환 적응 신경망 제어계의 리아프노브 안정도를 증명하여 모든 시변 신호가 유계임을 증명하였으 며 그 성능을 모의실험을 수행하여 보였다.
References
[1] E. Tzirkel-Hancock, F. Fallside,"Stable control of nonlinear systems using neural networks,"
Robust and Nonlinear Control
, vol. 2, pp. 63-68, 1992.
[2] A. Yesildirek, F. L. Lewis,"Feedback linearization using neural network,"
Automatica, vol. 31, no.
11, pp. 1659-1664, 1995.
[3] S. Fabri, V. Kadirkamanathan, "Dynamic structure neural networks for stable adaptive control of nonlinear system,"
IEEE Trans.Neural Networks
, vol. 7, no. 5, pp. 1151-1167, 1996.
[4] J. T. Spooner, K. M. Passino,"Stalbe adaptive control using fuzzy systems and neural networks,"
IEEE Trans. Fuzzy Systems, vol. 4, no. 3, pp. 339-359, 1996.
[5] S. N. Huang, K. K. Tan, and T. H. Lee,"Futher results on adaptive control for a class of nonlinear systmes using neural networks,"
IEEE Trans. Neural Networks, vol. 14, no. 3, pp.
719-722, 2003.
[6] S. S. Ge and C. C. Hang and T. Zhang,"Adaptive neural network control of nonlinear systems by state and output feedback,"
IEEE Trans.Systems, Man and Cybernetics-Part B:Cybernetics
, vol. 29, no. 6, pp. 818-828, 1999.
[7] A. J. Calise, N. Hovakimyan, M. Idan,"Adaptive output feedback control of nonlinear systems using neural networks,"
Automatica, vol. 37, no.
1, pp. 1201-1211, 2001.
[8] J.-H. Park, S.-H. Huh, S.-H. Kim, G.-T.
Park,"Direct Adaptive Controller for Nonaffine Nonlinear Systems Using Self-Structuring Neural Networks,"
IEEE Trans. Neural Networks, vol. 16, no. 2, pp. 414-422, 2005.
[9] I. Kanellakopoulos, P. V. Kokotovic, and A. S.
Morse,"Systematic design of adaptive controllers for feedback linearizable systems,"
IEEE Trans.Autom. Control
, vol. 36, no. 11, pp. 1241-1253, 1991.
[10] M. U. Polycarpou and M. J. Mears, "Stable adaptive tracking of uncertain systems using nonlinearly parameterized on-line approximators,"
Int. J. Control
, vol. 70, no. 3, pp. 363-384, 1998.
[11] Y. Li, S. Qiang, X. Zhuang, O. Kaynak, "Robust and adaptive backstepping control for nonlinear systems using RBF neural networks,"
IEEE Trans. Neural Networks, vol. 15, no. 3, pp.
693-7001, 2004.
[12] S. S. Ge, C. Wang, "Direct adaptive NN control of a class of nonlinear systems,"
IEEE Trans.Neural Networks
, vol. 13, no. 1, pp. 214-221, 2002.
[13] J. Q. Gong, B. Yao,"Neural network adaptive robust control of nonlinear systems in semi-strict feedback form,"
Automatica, vol. 37, pp. 1149-1160, 2001.
[14] J.-H. Park, S.-H. Kim, C.-J. Moon, "Adaptive Control for Strict-Feedback Nonlinear Systems Without Backstepping,"
IEEE Trans. Neural Networks, vol. 20, no. 7, pp. 1204-1209, 2009.
[15] J.-H. Park, S.-H. Kim, Y.-H, Chang, “Adaptive
Neural Control of Nonlinear Pure-feedback Systems.”
Journal of IKEEE, vol. 14, no. 3, pp.
10-17, 2010.
[16] S. S. Ge, C. Wang, "Adaptive nn control of uncertain nonlinear pure-feedback systems,"
Automatica
, vol. 38, pp. 671-682, 2002.
[17] D. Wang, J. Huang, "Adaptive neural network control for a class of uncertain nonlinear systems in pure-feedback form,"
Automatica, vol. 38, pp. 1365-1372, 2002.
[18] C. Wang, D. J. Hill, and S. S. Ge, G. Chem "An ISS-modular approach for adaptive neural control of pure-feedback systems,"
Automatica, vol. 42, pp. 723-732, 2006.
[19] T. P. Zhang, S. S. Ge, "Adaptive dynamic surface control of nonlinear systems with unknown dead zone in pure-feedback form,"
Autimatica
, vol. 44, pp. 1895-1903, 2008.
[20] B. Ren, S. S. Ge, C.-Y. Su, T. H. Lee,
"Adaptive Neural Control for a Class of Uncertain Nonlinear Systems in Pure-Feedback Form with Hysteresis Input,"
IEEE Trans. Sys.man, and Cybern.-part B:Cybern
, vol , no , pp, 2008.
[21] J.-J. E. Slotine, W. Li,
Applied Nonlinear Control, Prentice Hall, 1991.
[22] S. Behatsh,"Robust output tracking for nonlinear systems,"
Int. J. Control, vol. 51, no. 6, pp.
1381-1407, 1990.
[23] J.-H. Park, S.-H. Kim, and C.-J. Moon,
“Adaptive Neural Control for Strict-Feedback Nonlinear Systems Without Backstepping,”
IEEE Trans. Neural Networks
, vol. 20, no. 7, pp. 1204-1209, 2009.
[24] B. Ren, et. al., "Adaptive Neural Control for a Class of Uncertain Nonlinear Systems in Pure-Feedback Form With Hysteresis Input,"
IEEE Trans. Systems, Man, and Cybernetics-Part B:Cybernetics
, vol. 39, no. 2, pp. 431-443,2009.
[25] M. Wang, S. S. Ge, and K.-S. Hong,
"Approximation-Based Adaptive Tracking Control of Pure-Feedback Nonlinear Systems with Multiple Unknown Time-Varying Delays,"
IEEE Trans. Neural Networks
, vol. 21, no. 11, pp. 1804-1816, 2010.
[26] J Park, I. W. Sandberg, "Universal Approximation Using Radial-Basis-Function Networks,"
Neural Computation, vol. 3, pp.
246-257, 1991.
[27] H. K. Khalil,
Nonlinear Systems, Macmillan Publishing Company, 1992.
저 자 소 개