국방과학연구소(Agency for Defense Development)
․Manuscript received February 17, 2012 ; Revised May 9, 2012 ; Accepted May 22, 2012. (ID No. 20120217-017)
․Corresponding Author : Chang-Soo Ahn (e-mail : [email protected])
http://dx.doi.org/10.5515/KJKIEES.2012.23.6.740 ISSN 1226-3133 (Print)
전 탐색 영역 균일 성능을 갖는 항공기 탑재 능동 위상 배열 레이더의 빔 운용 연구
A Study on Beam Operation of an Airborne AESA Radar with Uniform Search Performance in Whole Scan Area
안 창 수․노 지 은․김 선 주 Chang-Soo Ahn․Ji-Eun Roh․Seon-Joo Kim
요 약
최신의 다목적 전투기에 필수적으로 장착되고 있는 능동 위상 배열 레이더(AESA radar, Active Electronically Scanned Array radar)는 스캔 손실(scan loss)로 인해 빔 조향각별 탐지 거리가 불균일하게 나타난다. 빔 조향각별 드웰 시간(dwell time)을 가변함으로써 스캔 손실을 보상할 수 있는 방식이 제시되어 왔으나, 한정된 자원 속에 탐색, 추적, 미사일 유도 등의 다기능을 수행해야 하는 전투기 사격 통제 레이더에서 이러한 방식의 효용성은 종합적인 측면에서 고려되어야 한다. 본 논문에서는 먼저 빔 조향각별 드웰 시간을 가변함으로써, 능동 위상 배열 레이더의 전 탐색 영역에서 균일한 탐색 성능을 도출하였다. 다음으로 고정된 프레임 시간(frame time) 안 에 빔 조향각별 드웰 시간을 가변하지 않을 경우의 탐색 부하를50 %로 가정하면, 균일한 탐색 성능을 위해서는 약100 %의 시간 자원을 탐색 업무에 할당함으로써, 다기능을 수행해야 하는 전투기 사격 통제 레이더의 요구사 항을 만족하지 못함을 나타내었다. 다른 한편으로 균일한 탐색 성능과 50 %의 탐색 부하를 나타내기 위해 프레 임 시간을 증가할 경우, 탐색 성능이 기존 대비 86.7 % 저하됨을 보여주었다. 이러한 분석을 바탕으로 프레임 시간, 탐색 부하, 탐색 성능을 종합적으로 고려한 전 탐색 영역 균일한 성능을 갖는 항공기 탑재 능동 위상 배열 레이더의 효과적인 빔 운용 방안을 제시하였다.
Abstract
An Active Electronically Scanned Array(AESA) radar required necessarily as the Fire Control Radar(FCR) of recent fighters has ununiform detection range with regard to scan angle due to scan loss. Although the compensation method of scan loss in an AESA radar with variable dwell time is investigated, the effectiveness of the method in a fighter FCR with multi-function such as search, track, and missile guidance within limited resources should be considered systematically. In this paper, uniform search performance of an AESA radar using variable dwell time with regard to scan angle is derived. We assumed the search load of 50 % for case without changing dwell time in fixed frame time and showed the fighter FCR requirement for multi-function is not satisfied because the search load for the uniform search performance should be increased by about 100 %. On the other hand, in case of increasing the frame time for the uniform search performance and search load of 50 %, degradation of the search performance is shown by 86.7
% compared with the former. Based on these analyses, the effective beam operation strategy on an airborne AESA radar with uniform search performance in whole scan area is described with consideration of frame time, search load and performance as a whole.
Key words : AESA Radar, Airborne Fire Control Radar, Uniform Search Performance, Radar Beam Operation
Ⅰ. 서 론
최신의 다목적 전투기는 탐지 거리의 증가, 탐색 영역 밖의 표적 추적, 탐색과 독립적인 다중 표적 추 적, 다중 표적 근접 교전 지원과 같은 전술 운용상의 이점을 가져오는 능동 위상 배열 레이더(AESA ra- dar, Active Electronically Scanned Array radar)를 탑재 하고 있다. 기존의 안테나 면을 기계적으로 회전하 여 탐색을 수행하는 기계식 빔 조향 레이더(MSA radar, Mechanically Scanned Array radar)가 빔 조향각 에 따른 균일한 탐지 거리를 나타내는 반면에, 능동 위상 배열 레이더는 그 특성상 빔 조향각에 따른 손 실, 즉, 스캔 손실(scan loss)에 의해 탐지 거리가 그 림1과 같이 불균일하게 나타난다[1]. 장거리에서 표 적에 대한 빠른 정보 획득이 교전 승패의 향방을 결 정지을 수 있는 공중전의 특성상, 전투기 사격 통제 레이더에서는 모든 방향에서의 균일한 탐색 성능이 중요하게 고려될 수 있으며, 이를 위해 능동 위상 배 열 레이더의 스캔 손실은 빔 조향각별 드웰 시간 (dwell time)을 가변함으로써 보상될 수 있다[2],[3].
그러나 이러한 드웰 시간의 가변에 따른 스캔 손 실 보상 방식은 레이더가 지정된 탐색 영역을 한번 스캔하는 데 걸리는 시간인 프레임 시간(frame time) 의 증가를 가져오거나, 프레임 시간을 고정하였을 경우에는 레이더에 주어진 자원 중 탐색 기능을 수 행하는 데 소요되는 자원 할당의 증가를 의미하게 된다. 프레임 시간의 증가는 표적에 대한 누적 탐지 확률에 영향을 미치는 점, 교전을 위해 추적 및 미사
그림 1. MSA와 AESA 레이더의 빔 조향각별 탐지 거리 비교
Fig. 1. Comparison of detection range in MSA and AESA radar.
일 유도 등을 보다 높은 우선 순위 임무로 고려하는 전투기 사격 통제 레이더에서 탐색 기능에 소요 자 원을 우선적으로 할당하지 않는 점을 고려하였을 때, 이러한 드웰 시간의 가변은 종합적인 측면에서 고려되어야 한다.
본 논문에서는 전 탐색 영역에서 균일한 성능을 갖도록 빔 조향각별 드웰 시간을 가변하는 능동 위 상 배열 레이더에서의 드웰 시간의 가변에 따른 프 레임 시간 및 추적 형성 거리의 상호 영향을 분석하 였다. 그리고 이러한 분석을 바탕으로 프레임 시간, 탐색 부하, 탐색 성능을 종합적으로 고려한 전 탐색 영역 균일한 성능을 갖는 항공기 탑재 능동 위상 배 열 레이더의 효과적인 빔 운용 방안을 제시하였다.
본 논문의 Ⅱ장에서는 전 탐색 영역 균일 성능을 갖 는 능동 위상 배열 레이더에서의 탐색 성능 도출 과 정을 설명하였고, Ⅲ장에서는 시뮬레이션을 통해 드 웰 시간의 가변에 따른 레이더 탐색 성능의 영향 분 석 및 그에 따른 효과적인 빔 운용 방안을 기술하였 으며, 마지막으로 Ⅳ장에서 결론을 맺는다.
Ⅱ. 전 탐색 영역 균일 성능을 갖는 능동 위상 배열 레이더
2-1 스캔 손실 보상 방식
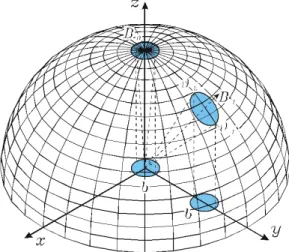
위상 배열 레이더의 빔조향 특성을 살펴보면, 그림 2와 같이 빔 조향각에 따라 시스템에서 탐색 영역을
그림 2. 위상 배열 레이더 빔 조향 특성
Fig. 2. Beam scan characteristic of phased array radar.
그림 3. 시스템 좌표계와 안테나 좌표계 Fig. 3.System and antenna coordinate.
정의하는 구좌표계에서는 빔 폭이 달라지게 된다[4]. 따라서 빔 조향각별로 안테나의 이득은 가변되며, 레이더가 빔 조향각에 따른 균일한 탐지 거리를 갖 기 위해서는 이러한 스캔 손실을 보상할 수 있도록 빔 조향각별로 다른 드웰 시간을 갖도록 할 수 있다.
이를 위해서는 먼저 지정된 탐색 영역에 할당되 는 각 빔의 위치 및 간격이 결정되어야 하며, 빔 조 향각에 따라 빔 폭이 가변되지 않는 안테나 좌표계, 즉, u-v 좌표계를 이용할 수 있다. 그림 3과 같이 시 스템 좌표계와 안테나 좌표계를 정의하면, 좌표계간 의 전환을 통해 식 (1)과 같은 관계식을 도출할 수 있다[5]. 여기서 는 안테나면의 기울임 각이다.
sin cos
cos sin
tan
sin (1)
상기의 식으로부터 방위각, 고각으로 레이더의 탐 색 영역과 빔 간격이 정해지면, 이를 만족하는 u-v 좌표계상의 위치 및 빔 개수를 확인할 수 있고, 식 (2)로부터 해당되는 빔 위치에서의 스캔 손실을 보 상할 수 있는 드웰 시간을 계산할 수 있다[2],[6].
≃cos
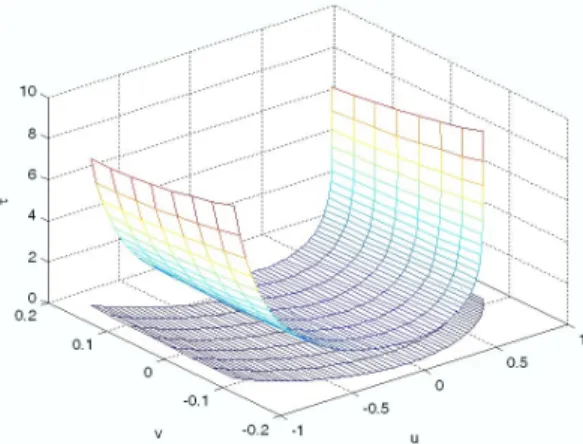
cos sin (2) 그림4는 이러한 방식으로 방위각 ±60°, 고각 0~
15°, 빔 간격 2.1°, 안테나면의 기울임 각 10°의 조건
그림 4. AESA 레이더의 빔 조향각별 드웰 시간 가변 예 Fig. 4. Example of variant dwell time in an AESA
radar.
으로 레이더가 탐색을 수행할 경우, 균일한 탐지 거 리를 나타내기 위해 각 빔 위치당 가변되어야 할 드 웰 시간을 나타낸 것이다. 기준이 되는 안테나 보어 사이트(bore-sight) 위치에서의 드웰 시간은 1로 설정 하였다.
2-2 탐색 성능 도출
빔 기민성(beam agility)을 이용하여 표적을 탐지 및 추적하는 능동 위상 배열 레이더의 경우, 탐지 거 리 측면이 아닌 추적 형성 거리(track formation range) 가 실질적인 탐색 성능에 대한 지표이기 때문에[7], 본 절에서는2-1절의 내용을 반영한 레이더의 거리 에 따른 추적 형성 거리를 도출하는 과정을 설명하 고자 한다.
정의에 따라 단일 추적 형성 확률(probability of single track formation)은 식 (3)과 같이 나타낼 수 있 다. 여기서 과 은 각각 거리R에서의 단일 탐지 확률(probability of detection) 및 확인 확률 (probability of confirm)이다. 본 논문에서는 논의의 편의를 위하여 0.9로 설정하기로 한다.
・ (3) Swerling I 표적에 대해은 식(4)와 같이 나 타낼 수 있으며[8], 여기서 는 오경보 확률(proba- bility of false alarm), , 는 기준 신호대 잡음 비 및 그에 해당하는 표적의 거리이다.
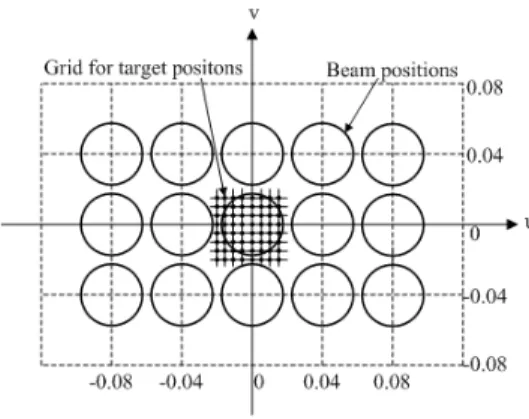
그림 5. 빔과 표적의 위치
Fig. 5. Positions of beams and a target.
(4) 실질적으로 표적은 해당 위치에 중심을 갖는 빔 에 의해서만 탐지되는 것이 아니라, 주변 빔에 의해 서도 탐지될 수 있다. 예를 들어, 빔 간격 2.3°, 빔 폭 2°로 탐색 영역을 스캔할 경우의 빔 위치는 그림 5와 같이 u-v좌표계에 나타낼 수 있다. 만일 표적이 u-v 좌표계의(0,0)에 위치한다고 가정할 경우, 좌표계상 의 중심에 위치한 빔에 의해 수신된 표적의 신호대 잡음비가 가장 클 것이며, 주변 빔에 의해서도 해당 위치의 표적에 대한 반사 신호가 레이더로 수신될 수 있다. 이러한 표적 및 빔 중심의 상호 위치에 따 른 신호대 잡음비는 식(5)와 같이 나타낼 수 있다[9]. 여기서 , 는 각각 표적 및 빔의 위치,
는 빔 폭을 나타낸다. 따라서 특정 표적 위치에 대 해 레이더에서 탐지를 위해 설정한 신호대 잡음비의 문턱 값을 초과하는 빔의 위치가 있으면, 탐지 과정 에 이를 반영해야 한다. 즉, 설정된 신호대 잡음비의 문턱 값을 초과하는 빔의 위치 수를n이라고 한다면, n개의 빔 위치 중 적어도 한 개의 빔에서 탐지가 이 루어지면 되는 것이므로, 이를 고려한 최종적인 단 일 탐지 확률은 식 (6)과 같이 나타낼 수 있는 것이 다[10]. 본 논문에서는 n을 결정하는 기준으로 식 (5) 에 의해 표적과 빔의 상호 위치에 따른 신호대 잡음 비의 감소값이30 dB 이하인 빔의 위치를 선정하였 으며, 이는 참고문헌 [10]과 같은 설정 값이다. 따라 서 식(6)에 의한 최종 단일 탐지 확률은 식 (4)와 (5)
에 의해n개의 각 빔 위치에서의 탐지 확률() 을 계산하여 적용하면 구할 수 있다.
・ exp
(5)
(6)
∆
∆
∆
∆
(7) 일반적으로 레이더에서의 탐색 성능은 단일 탐지 확률보다는 누적 탐지 확률로 대표되며, 위상 배열 레이더에서는 특히, 식 (7)과 같은 거리 R에서의 누 적 추적 형성 확률(cumulative probability of track for- mation)로 그 탐색 성능을 나타낼 수 있다[11],[12]. 본 논문에서는 추가적으로 표적이 한 빔에 대하여 그 중심이 아닌 위치에 존재할 수 있음을 고려하였다.
즉, 식 (7)에서는 그림5의 표적 위치 격자의 수,
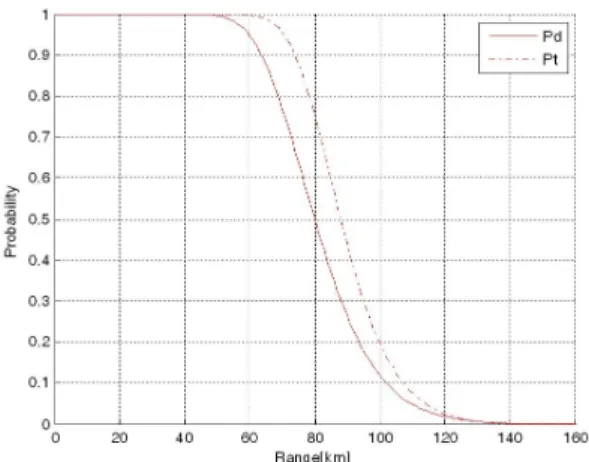
는 표적의 격자 위치를 나타내는 것으로서, 표적 의 위치별 주변 빔에 의한 탐지를 고려한 식(6)에 의한 단일 탐지 확률을 이용하여 누적 확률을 구한 후, 그 평균을 구함으로써, 거리 R에서의 최종 누적 추적 형성 확률을 구해낸다. 식 (7)에서∆은 프레 임 시간동안 표적이 이동한 거리, N은 거리 R까지 표적이 이동하는 동안 레이더가 표적을 보는 횟수이 며, 그림 6은 표 1과 같이 파라미터들을 설정하였을
표 1. 설정 파라미터 Table 1. Assumed parameters.
Parameters Value Az. coverage —60°~+60°
El. coverage 0°~15°
Beam width 3°
Beam overlap angle 2.1°
Tilt angle 10°
km 0.5
∆ 5 km
그림 6. 거리에 따른 탐지 확률과 누적 추적 형성 확률 Fig. 6. Probability of detection and cumulative proba-
bility of track formation versus range.
경우의 거리에 따른 탐지 확률과 누적 추적 형성 확 률을 나타낸다. 즉, 빔 조향각 별로 균일하게 74 km에서0.9의 추적 형성 확률을 나타냄을 의 미한다.
Ⅲ. 레이더 탐색 성능 영향 분석 및 빔 운용 방안
2절에서 빔 조향각별 드웰 시간을 가변하여 빔 조 향에 따른 스캔 손실을 보상할 수 있음을 설명하였 다. 그러나 이러한 드웰 시간의 가변에 따른 스캔 손 실 보상 방식은 레이더가 지정된 탐색 영역을 탐색 이외의 추적 및 미사일 유도 등의 기능을 수행하면 서 한번 스캔하는 데 걸리는 시간인 프레임 시간의 증가를 가져오거나, 프레임 시간을 고정하였을 경우 에는 레이더에 주어진 자원 중 탐색 기능을 수행하 는 데 소요되는 자원 할당의 증가를 의미하게 된다.
즉, 프레임 시간의 증가는 결국 △R의 증가를 의미 하며, 식 (7)에서 보는 바와 같이 표적에 대한 누적 추적 형성 확률에 영향을 미치게 된다. 또한, 교전을 위해 추적 및 미사일 유도 등을 보다 높은 우선 순위 임무로 고려하는 전투기 사격 통제 레이더에서 탐색 기능에 소요 자원을 우선적으로 할당하지 않는 점을 고려하였을 때, 탐색 부하의 허용 정도도 고려되어 야 한다. 본 절에서는 이러한 점을 고려한 레이더 탐 색 성능의 영향을 수치적으로 분석하고, 그 결과에 따른 효과적인 빔 운용 방안을 제시한다.
3-1 프레임 시간을 고정할 경우의 영향 분석 먼저 한정된 레이더 시간 자원에서 탐색 기능에 할당되는 시간의 정도를 , 추적, 미사일 유도 등 우선 순위가 높은 기능을 포함한 탐색 이외의 기능 에 할당되는 시간의 정도를 라고 하면, 식 (8)과 같이 나타낼 수 있다. 여기서은 지정된 탐색 영역을 스캔하는데 필요한 빔의 개수, 은 안 테나 보어 사이트 방향에서의 드웰 시간, 는 스캔 손실을 보상할 경우의 평균 드웰 시간을 나타 낸다.
・
or
⇔
・
≤ (8)
프레임 시간을 고정할 경우에는 식 (8)과 그림 4 에서 알 수 있듯이, 스캔 손실을 보상한 드웰 시간을 각 빔 위치에 할당했을 경우의 탐색 부하가 안테나 보어 사이트 방향에서의 드웰 시간을 전 빔 위치에 그대로 할당했을 경우의 탐색 부하보다 크게 될 것 이다. 이를 수치적으로 확인하기 위하여 2절의 설정 파라미터를 이용하였고, 안테나 보어 사이트 방향에 서의 드웰 시간을 전 빔 위치에 그대로 할당했을 경 우의 탐색 부하를 50 %로 가정하였다.
참고문헌[3]에서는 식 (9)와 같이 고각과 방위각 영역, 빔 간격(ψ), 그리고 안 테나면 기울임 각이 주어지면, 지정 탐색 영역에 요 구되는 빔 개수를 구할 수 있음을 나타내었다. 본 논 문에서는 식(2)의 계산을 위해 각 빔의 위치에 해당 하는 를 이미 구했으므로, 이의 좌표쌍 수가 요구되는 빔의 개수가 된다. 두 방법에 의해 구한 요 구되는 빔의 개수는 거의 같음을 그림 7을 통해 알 수 있다. 그림 7에서 실선은 참고문헌 [3]의 방식으 로 구한 빔의 개수, 원은 좌표쌍 수를 이용해 서 구한 빔의 개수를 나타낸다.
결과적으로 2절의 설정 파라미터를 만족하는 요 구되는 빔 개수 332이며, 평균 드웰 시간
1.97이다. 이를 기준으로 그림 8과 같이
드웰 시간, 프레임 시간, 탐색 부하의 관계를
그림 7. 지정된 탐색 영역을 스캔하기 위한 빔 간격에 따른 요구 빔 개수
Fig. 7. Number of required beams versus beam overlap angle for scan of the search area.
그림 8. 드웰 시간, 프레임 시간, 탐색 부하의 관계 Fig. 8. Relation among dwell time, frame time and sear-
ch load.
로 정규화하여 나타내 보면, 프레임 시간을 변경하 지 않을 경우, 탐색 부하는 스캔 손실을 보상하기 위 해 증가된 평균 드웰 시간에 의해 거의100 %로 증 가하게 된다. 이는 레이더의 모든 시간 자원을 탐색 기능에 할당하는 것을 의미하며, 앞서 말했듯이 교
cossin
cos cossinsin sincossin
cos cossinsin sincossin
csc
(9) 전을 위해 추적 및 미사일 유도 등을 보다 높은 우선 선위 임무로 고려하는 전투기 사격 통제 레이더에서 는 받아들일 수 없는 상황이 된다. 따라서 다시 전 탐색 영역에 균일한 성능을 가지면서 탐색 부하를 기존의 50 %를 유지하기 위해서는 프레임 시간을 증가시켜야 한다.3-2 프레임 시간을 변경할 경우의 영향 분석 3-1절의 분석에서 전 탐색 영역에 균일한 성능을 가지면서 탐색 부하를 기존의 50 %를 유지하기 위 해서는 프레임 시간을 증가시켜야 함을 알 수 있다.
그러나 식(7)에서 보는 바와 같이 표적에 대한 누적 추적 형성 확률은 프레임 시간에 의해 결정되는
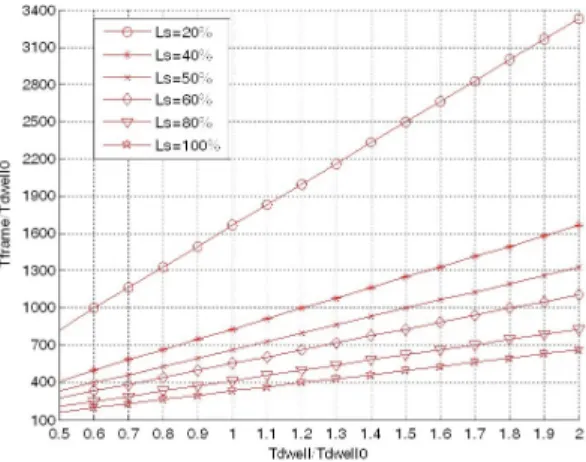
△R의 함수이므로, 탐색 부하를 고려한 프레임 시 간의 조정은 다시 탐색 성능에 영향을 미치게 됨을 의미한다. 이러한 영향을 수치적으로 확인하기 위해 2절에서 구한 추적 형성 거리 와 그때의 프레임
시간을로 두고, 이러한 값들로 정규화한 프
레임 시간에 따른 추적 형성 거리를 나타내면 그림 9와 같다. 여기서 점선으로 표시한 부분은 식 (8)의 셋째 줄 조건을 만족하지 못하는 영역을 나타낸다.
따라서 스캔 손실을 보상하기 위해 증가된 평균 드
그림 9. 프레임 시간의 가변에 따른 추적 형성 거리 Fig. 9. Track formation range versus frame time.
웰 시간에 의해 약100 %가 된 탐색 부하를 다시 50
%로 만들기 위해 프레임 시간을 2배로 증가할 경우, 이는 추적 형성 거리의 약86.7 %의 감소로 나타나 게 됨을 알 수 있다.
3-3 효과적인 빔 운용 방안
결과적으로 전 탐색 영역에 균일한 성능을 갖도 록 드웰 시간을 가변하여 보상할 경우에는 프레임 시간과 탐색 부하, 요구되는 추적 형성 거리를 종합 적으로 검토하여야 하며, 그림 10은 이러한 관계를 나타내는 그래프이다. 여기서 과 은3-2 절에서 구한 전 탐색 영역 균일 성능을 가지면서 탐 색 부하가 50 %일 때의 추적 형성 거리 및 프레임 시간이다.
그림10으로부터 전투기 사격 통제 레이더로서 능 동 위상 배열 레이더를 장착할 경우, 그리고 전 탐색 영역에서 균일한 성능이 요구될 경우에는 다음과 같 은 빔 운용 방안이 가능하다. 첫 번째, 초기 탐색 단 계에서는 지정된 탐색 영역을 빠르게 스캔하고, 보 다 먼 거리에서 표적을 탐지하여 추적을 형성할 수 있도록 빔을 운용한다. 예를 들어, 빔 조향각별 가변 되는 드웰 시간은 유지한 채, 기준이 되는
보다1/2배 짧은 프레임 시간을 설정하게 되면, 탐색 부하는 100 %로 증가하고, 추적 형성 거리는 기준 거리인Rt1 대비 약 15 % 증가하게 될 것이다. 초기 탐색 단계에서는 레이더 시간 자원을 탐색 기능에 중점적으로 할당할 수 있으므로 이러한 빔 운용은 실
그림 10. 프레임 시간, 탐색 부하, 추적 형성 거리 관계 Fig. 10. Relation among frame time, search load, and
track formation range.
질적으로도 허용 가능할 것이다. 두 번째, 다수의 표 적이 탐지되어 추적중일 경우, 레이더의 시간 자원은 탐색 기능에 적게 할당해아 할 것이며, 이러한 상황 에서는 새로운 표적의 탐지보다는 기존의 추적 중인 표적에 대한 처리가 우선적일 것이다. 예를 들어, 이 러한 경우에 20 %의 탐색 부하가 허용된다고 하고, 초기 탐색 단계에서의 프레임 시간0.5을 유 지한다고 하면, 빔 조향각별 가변되는 드웰 시간을 상대적으로 감소시켜야 하고, 추적 형성 거리는
대비 약29 % 감소하게 될 것이다. 그러나 상대적으 로 탐색 영역에 대해 빠르게 스캔해야 할 필요성이 적으므로, 20 %의 탐색 부하는 유지하고, 프레임 시
간을 으로 증가함으로써, 추적 형성 거리의
감소율을 완화시키도록 빔을 운용할 수도 있다.
Ⅳ. 결 론
본 논문에서는 항공기 탑재 능동 위상 배열 레이 더에서의 빔 조향각별 스캔 손실에 의한 불균일한 탐지 거리의 보상 방식 및 그에 따른 프레임 시간, 탐색 부하, 탐색 성능의 영향을 다루었다. 먼저 빔 조향각별 드웰 시간을 가변함으로써, 능동 위상 배 열 레이더의 전 탐색 영역에서 균일한 탐색 성능을 도출하였다. 다음으로 고정된 프레임 시간안에 빔 조향각별 드웰 시간을 가변하지 않을 경우의 탐색 부하를50 %로 가정하면, 균일한 탐색 성능을 위해 서는 약100 %의 시간 자원을 탐색 업무에 할당함으 로써, 다기능을 수행해야 하는 전투기 사격 통제 레 이더의 요구 사항을 만족하지 못함을 나타내었다.
다른 한편으로 균일한 탐색 성능과50 %의 탐색 부 하를 나타내기 위해 프레임 시간을 증가할 경우, 탐 색 성능이 기존 대비 86.7 % 저하됨을 보여주었다.
이러한 분석을 바탕으로 프레임 시간, 탐색 부하, 탐 색 성능을 종합적으로 고려한 전 탐색 영역 균일한 성능을 갖는 항공기 탑재 능동 위상 배열 레이더의 효과적인 빔 운용 방안을 제시하였다. 향후, 확인, 추적 및 미사일 유도 등의 다른 기능에 소요되는 부 하를 세분화하여 상호 영향을 미치는 레이더 파라미 터를 최적화하는 연구가 필요하며, 실시간 적응형 레이더 자원 관리의 개발이 필요할 것으로 판단 된다.
참 고 문 헌
[1] Paul E. Holbourn, "The future evolution of airborne radar", Military Technology, vol. 23, no. 8, pp. 57- 64, 1999.
[2] J. M. Butler, Multi-function radar tracking and con- trol, University College London. Ph.D. Thesis, 1998.
[3] A. Alexopoulos, "Radar systems considerations for phased array aperture design using conformal trans- formations on Riemannian manifolds", IEEE Trans.
on Aerospace and Electron. Syst., vol. 55, no. 8, pp.
2239-2246, 2007.
[4] Wilhelm H. V. Aulock, "Properties of phased arr- ays", Proceedings of the IRE, pp. 1727-1727, 1960.
[5] Larry E. Corey, "A graphical technique for deter- mining optimal array antenna geometry", IEEE Tr- ans. on Antennas and Propagation, vol. 33, no. 7, pp. 719-726, 1985.
[6] A. Shaw, A. Alexopoulos, "Optimum number of fa- ces for phased array radar in constant dwell sur-
veillance", IEE Electronics Letters, vol. 41, no. 3, pp. 154-155, 2005.
[7] E. R. Billam, "MESAR-the application of modern technology to phased array radar", IEE Tutorial Meet- ing on Phased Array Radar, Sep. 1989.
[8] D. P. Meyer, H. A. Mayer, Radar Target Detection, Academic Press Inc., New York and London, 1973.
[9] Merrill I. Skolnik, Introduction to Radar Systems, 3rd Edition, McGraw-Hill, 2001.
[10] J. E. Fielding, "Beam overlap impact on phased- array target detection", IEEE Trans. on Aerospace and Electron. Syst., vol. 29, no. 2, pp. 404-411, 1993.
[11] J. D. Mallett, L. E. Brennan, "Cumulative probabi- lity of detection for targets approaching a uni- formly scanning search radar", Proc. IEEE, vol.
51, pp. 596-601, 1963.
[12] E. R. Billam, "The computation of the cumulative probability of detection in radar", International Con- ference on Radar, 1994.
안 창 수
2005년 2월: 고려대학교 전파통신 공학과(공학석사)
2005년 3월~현재: 국방과학연구소 선임연구원
[주 관심분야] 반도체 송수신 모듈 설계, 항공기 레이더 운용모드 설 계, 능동 위상배열 레이더 시스템 설계
노 지 은
2000년 2월: 부산대학교 전자컴퓨터 공학부(공학사)
2002년 2월: 포항공과대학교 컴퓨터 공학과(공학석사)
2006년 2월: 포항공과대학교 컴퓨터 공학과(공학박사)
2006년 2월~현재: 국방과학연구소 선임연구원
[주 관심분야] 레이더 신호처리, 통제 알고리즘 등
김 선 주
1988년 2월: 아주대학교 전자공학 과(공학석사)
1988년 3월~현재: 국방과학연구소 책임연구원
[주 관심분야] 반도체 송수신 모듈 설계, 능동 위상배열 레이더 시스 템 설계, 항공기 레이더