A B S T R A C T KEYWORDS Purpose: This research proposes an optimization model for effective evacuation routing
and scheduling of civilians near the border area when full-scale war threats heighten.
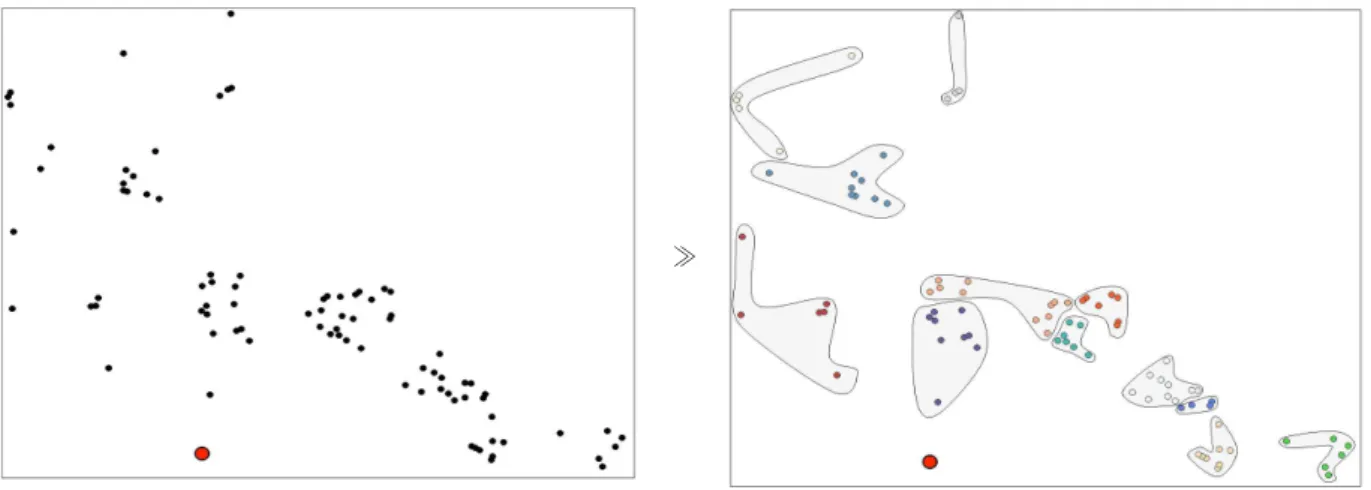
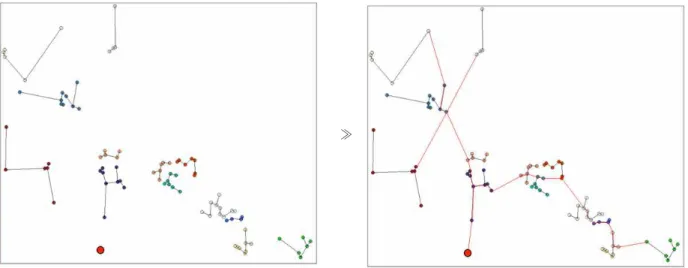
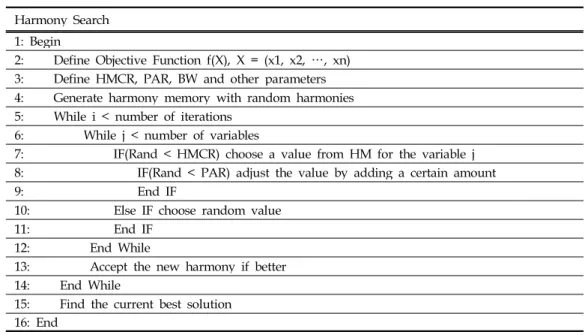
Method: To reflect the reality, administrative unit network is created using Kruscal's Algorithm, Harmony Search, CCRP based on the geographical features, population, and traffic data of real cities, and then, optimal civilian evacuation routes are found.
Results: Optimal evacuation routes and schedules are computed by repetitive experiments, and it is found that the scenario that minimizes the average civilian evacuation time is effective for the civilian evacuation plan.
Conclusion: By using the civilian evacuation plan this research proposes, at the time of establishing the actual civilian evacuation plan, quantitative analysis is used for the effective plan making rather than only depending
War,
Civilian Withdraw Plan, Heuristic Method, Harmony Search, CCRP
연구목적 : 본 연구는 전면전 위기 고조 시 효율적인 접경지역 주민 철수경로 및 일정수립에 최적화된 모형 제안을 목적으로 한다 .
연구방법 : 현실 반영을 위해 실제 도시의 지형, 인구, 도로 데이터를 기반으로 Kruscal’s Algorithm, Harmony Search, CCRP를 활용하여 행정구역(읍·면·동) 단위 네트워크를 생성 한 후 , 최적의 주민철수로를 찾는 순서로 실험을 진행한다.
연구결과 : 반복실험을 통해 최적의 주민철수 경로 및 스케줄을 산출하였고, 주민 철수시간 평균을 최소화하는 시나리오가 주민철수 계획수립에 효율적이라는 것을 확인하였다 . 결론 : 본 연구에서 제안하는 주민철수 모형을 활용하면, 주민철수 계획 수립 시 기존의 정 성적인 분석에 정량적 분석을 보완하여 보다 효율적인 계획 수립이 가능할 것으로 사료된다 .
전면전 , 주민철수 계획 , 휴리스틱 기법 , 화음 탐색법 ,
용량 제한 라우팅계획
ⓒ 2018 Korea Society of Disaster Information All rights reserved
접경지역 최적 주민철수 계획수립을 위한 모형 연구
Research for establishing a model of optimizing civilian withdrawal plan for the border area
정재환
a,1
, 윤호영a,2
, 정창순a,3
, 김경섭a,*
Jae Hwan Jung
a,1
, Ho Yeong Yuna,2
, Chang Soon Jeonga,3
, Kyung Sup Kima,*
a
![Fig. 1. G = Evacuation Network[9] Fig. 2. GT = Time-expanded Evacuation Network[9]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5527513.461822/4.853.73.797.125.454/fig-evacuation-network-fig-time-expanded-evacuation-network.webp)