레이저 미세피치 홀 가공의 생산효율성 향상을 위한 영상처리 측정 기법 적용
표창률
#Application of Image Processing Technique to Improve Production Efficiency of Fine Pitch Hole Based on Laser
C. R. Pyo
(Received April 12, 2010 / Revised July 27, 2010 / Accepted July 28, 2010)
Abstract
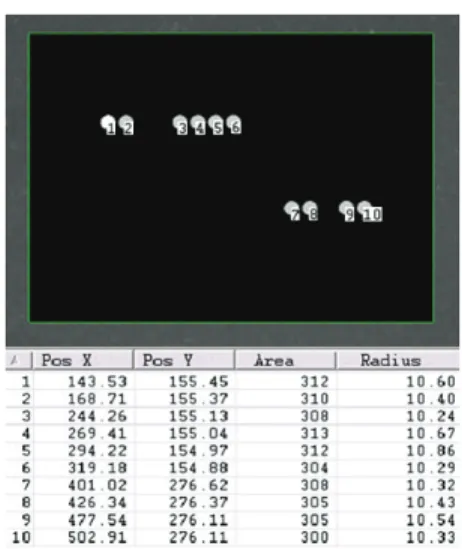
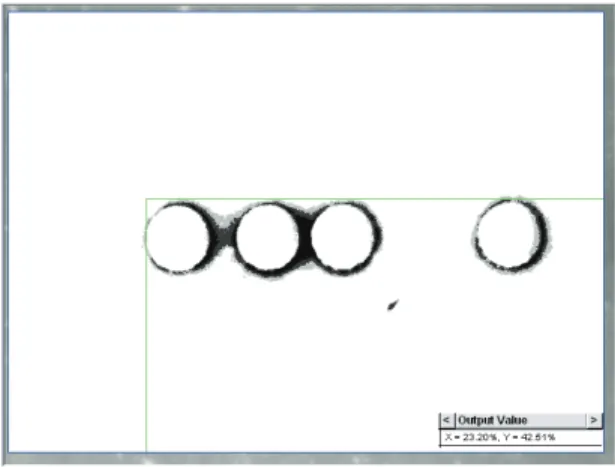
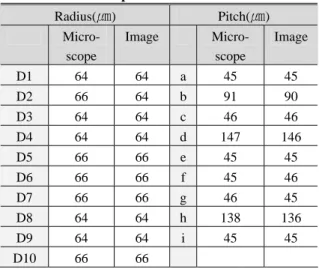
Multi-Layer Ceramic Circuit(MLCC) in the face of thousands of fine pitch multi hole is processed. However, the fine pitch multi hole has a size of only a few micrometers. Therefore, in order to curtail the measurement time and reduce error, the image processing measurement method is required. So, we proposed an image processing measurement algorithm which is required to accurately measure the fine pitch multi hole. The proposed algorithm gets image of the fine pitch multi hole, extracts object from the image by morphological process, and extracts the parameters of its position and feature by edge detecting process. In addition, we have used the sub-pixel algorithm to improve accuracy. As a result, the proposed algorithm shows 97% test-retest measurement reliability within 2 ㎛. We found that the algorithm was well- suited for measuring the fine pitch multi hole.
Key Words : Image Processing, Morphology, Auto Focusing, Edge Detection, MLCC, Parabolic Interpolation
1. 서 론
최근의 반도체 및 디스플레이 산업은 고집적화, 고속화, 저전력화를 추구하고 있다. 고집적화에 추세에 맞추어 100nm 이하의 선폭을 구현하여 현 재 30nm 이하의 선폭을 구현하는 상황에 있다. 이 에 따라 제품의 측정 기술에도 많은 발전이 요구 되는 상황이다. 특히 Fig. 1 과 같이 반도체 검사장 비에 사용되는 다층회로인쇄 세라믹기판(Multi- Layer Ceramic Circuit)은 대면적에 수천 개의 원형 혹은 사각 fine pitch multi hole 이 가공되는데 fine pitch multi hole 의 직경 및 홀 사이의 피치에 약 1/10 비율 즉, 수 ㎛ 이내로 가공오차를 줄여야 하기 때문에 가공 및 측정에 많은 어려움이 있다.
이런 세라믹기판은 물리적인 측정 장비로 측정
하기가 매우 어려우며 광학 장비를 이용한다 하 여도 측정 속도 및 정밀도를 고려할 때, 효율성은 매우 낮다. 그러나 영상처리기법을 측정에 이용하 면 카메라와 렌즈의 시스템 구성에 따라 수 ㎛의 정밀도를 갖는 측정이 가능하고 영상이 획득되는 시간과 거의 동일하게 처리되는 빠른 측정 속도 를 가지기 때문에 효율성이 우수하다. 따라서 fine pitch multi hole 의 레이저가공 공정에 영상처리기 법을 이용한 실시간 측정 시스템을 적용하면 fine pitch multi hole 의 정밀 측정이 가능하고, 가공 중 발생하는 불량의 실시간 모니터링이 가능하여 생 산효율을 높일 수 있다. 그러나 영상처리시스템은 측정대상물에 적합한 측정 알고리즘을 적용하여 야 측정 정밀도를 향상시킬 수 있어 적합한 측정 알고리즘의 선택은 매우 중요하다.
# 교신저자: 인덕대학 기계자동차과 E-mail: [email protected]