Manuscript received May 24, 2018, Accepted July 11, 2018
1 * KEPCO Research Institute, Korea Electric Power Corporation, 105 Munji‐ro Yuseong‐gu, Daejeon 34056, Korea
† stkim‐[email protected]
Patrol Monitoring Plan for Transmission Towers with a Commercial Drone and its Field Tests
상용화
드론을 이용한 송전선로 점검방안 및 현장시험
Seok‐Tae Kim
1†, Joon‐Young Park
1, Jae‐Kyung Lee
1, Ji‐Wan Ham
1, Min‐Hee Choi
1김석태
1†, 박준영
1, 이재경
1, 함지완
1, 최민희
1Abstract
Various types of robots running on power transmission lines have been developed for the purpose of line patrol monitoring.
They usually have complex mechanism to run and avoid obstacles on the power line, but nevertheless did not show satisfactory performance for going over the obstacles. Moreover, they were so heavy that they could not be easily installed on the lines. To compensate these problems, flying robots have been developed and recently, multi‐copter drones with flight stability have been used in the electric power industry. The drones could be remotely controlled by human operators to monitor power distribution lines. In the case of transmission line patrol, however, transmission towers are huge and their spans are very long, and thus, it is very difficult for the pilot to control the patrol drones with the naked eye from a long distance away. This means that the risk of a drone crash onto electric power facilities always resides. In addition, there exists another danger of electromagnetic interference with the drones on autopilot waypoint tracking under ultra‐high voltage environments. This paper presents a patrol monitoring plan of autopilot drones for power transmission lines and its field tests. First, the magnetic field effect on an autopilot patrol drone is investigated. Then, how to build the flight path to avoid the magnetic interference is proposed and our autopilot drone system is introduced. Finally, the effectiveness of the proposed patrol plan is confirmed through its field test results in the 154 kV, 345 kV and 765 kV transmission lines in Chungcheongnam‐do.
과거 송전선로를 점검하기 위하여 선로를 주행하는 로봇시스템을 이용하여 점검방법이 있었으나 선로를 주행하기 위한 구 동장치와 장애물을 회피하기 위한 복잡한 메커니즘 등으로 시스템 자체가 무거워 선로에 설치하기가 어렵고 선로의 장애물을 완벽하게 회피하여 주행하지 못하는 단점이 있었다. 그래서 공중에서 비행하며 점검하는 비행로봇 형태가 개발됐고 최근 회전 익 멀티콥터 형태 드론의 비행안정도가 높아짐에 따라 전력산업에도 전력설비 점검에 이용되기 시작했다. 배전설비를 수동조종 으로 비행하는 드론을 이용하여 점검해 왔다. 그러나 송전선로나 철탑의 경우, 설비 규모가 크고 경간 거리가 멀어 비행 중인 드론의 위치와 송전선로간의 거리를 가늠하기 어렵기 때문에 드론을 수동으로 시계비행하며 송전선로를 점검하기에는 선로와의 충돌위험에서 자유롭기 어렵다. 또한, 수동조종으로 선정된 웨이포인트(Way‐point)에 의존한 자동비행점검도 송전선로에 형성되 는 자기장에 의해 드론의 전자식 나침판이 오작동하여 비행방향의 오류를 초래하므로 송전선로와의 충돌 가능성이 여전히 상존 한다 . 그러므로 본 논문에서는 송전선로의 자기장을 영향에 대한 드론점검 작업환경을 조사하고 이를 근거로 자기장 영향권 밖 에서 비행경로를 생성하여 고배율카메라와 열화상 카메라가 탑재된 상용화 드론을 이용하여 자동비행하면서 송전선로를 점검할 수 있는 체계를 소개한다. 또한, 이 점검체계를 이용하여 충남지역의 154 kV, 345 kV, 765 kV 등 전압별 실 선로에 대하여 적용 한 현장시험결과를 소개하고자 한다..
Keywords: Transmission Line, Commercial Drone, Patrol
I. 서론
우리나라의 가공 송전선로는 현재 작업자가 고배율망원 경 또는 열화상카메라, 코로나 카메라 등을 이용하여 직접 육 안으로 점검하거나 유인헬기에 탑재한 적외선 열상장비 (Thermovision)로 전선접속개소의 과열여부를 진단하고 선로 주변상황을 확인하여 전력선 단선고장 예방할 수 있다. 가공 송전 분야의 설비 점검의 종류는 Table. 1과 같이 14가지의 점검이 있다. 이 중 항공장애등 점검, 스페이서 점검, 고배율 망원경 점검, 자연재해 대비 점검 등은 드론에 장착된 고화질 광학 줌카메라를 이용하여 점검할 수 있다.
또한 , 가송송전분야의 설비 진단의 종류는 Table. 2와 같 이 7가지 진단이 있으며, 이 중 전선접속개소 열화상진단, 폴 리머애자 성능진단, 주간코로나 진단 등은 점검드론에 열화상 카메라와 코로나카메라를 장착한다면 드론에서 취득한 영상 정보 또는 실시간전송영상 분석을 바탕으로 진단이 가능할 것으로 예상된다.
해외에서는 극한작업에 해당하는 가공송전분야의 점검을
위해 로봇을 활용하는 연구가 진행 중에 있다. 송전선로 점검 용 로봇은 크게 전력선을 타고 가면서 설비를 정밀점검하거 나 유지보수를 수행하는 전력선 라인탐상로봇과 송전선로에 비행으로 접근하여 설비를 카메라로 점검하는 비행로봇으로 구분하여 개발되고 있다.
송전선로를 주행하는 대표 라인탐상로봇은 캐나다 Hydro‐
Québec의 Line Scout (Fig. 1)로 송전선로의 장애물을 슬라이 딩 방식을 이용하여 회피하는 메커니즘을 가지고 있다 [2].
Line Scout에는 Fig. 1의 ①과 같이 패닝과 틸팅이 가능한 육 안검사용 카메라가 로봇팔에 장착되어 있고 수리 클램프(②),
특별점검 여 시행하는 점검
항공장애등 점검 항공법 및 군용항공기지법에 의거 설치된 항공장애표시등의 동작 상태를 확인하기 위한 점검
스페이서 점검 다도체 송전선로에 설치되어 있는 스페이서 및 스페이서‐댐 퍼의 볼트 풀림 여부 및 취부상태를 확인하기 위한 점검 접지저항 측정 송전용 철탑 또는 철주 등 지지물의 접지저항치를 확인하기
위하여 시행하는 측정 고배율망원경 점
검
지상에서 육안으로 고배율망원경을 이용하여 전선 및 부착 금구류(스페이서, 슬리브, 항공표시구 등) 등 상시 충전부를 세밀하게 조사하는 점검
피뢰기 점검 송전선로용 피뢰기의 성능을 확인하기 위하여 시행하는 점 검
낙뢰 표시기 점검 송전선로용 낙뢰 표시기의 성능을 확인하기 위하여 시행하 는 점검
자연재해 대비 점검
자연재해에 대비하기 위하여 송전설비의 상태를 도보 및 차 량을 사용하여 신속하게 점검(필요시 승탑점검 시행)
산지철탑 예방점검
천재지변 등으로 인하여 철탑부지 사면 또는 철탑부지 주변 에 사고 발생이 우려되거나 사고가 발생되어 송전선로 설비 에 영향을 줄 우려가 있다고 예상되는 경우 및 철탑부지 주 변의 각종 공사로 인하여 철탑의 안정에 위해가 예상되어 정기점검만으로는 사고 예방을 기대할 수 없는 철탑에 대하 여 시행
산지철탑 특별점검
철탑부지 정기점검, 예방점검을 실시하여 사면안정도 1차 평가 결과 D등급 이상인 철탑부지 사면에 대하여 시행하는 점검이며, 기타 설비운영사업소에서 의뢰하여 시행하는 점 검을 포함
하천철탑 예방점검
천재지변 등으로 인하여 하천 철탑부지 또는 부지 주변에 사고 발생이 우려되거나 사고가 발생되어 송전선로 설비에 영향을 줄 우려가 있다고 예상되는 경우 및 철탑부지 주변 의 각종공사로 인하여 철탑의 안정에 위해가 예상되어 정기 점검만으로 사고예방을 기대할 수 없는 철탑에 대하여 시행
전선이도 휴대용 PC, 측량기 등의 과학화 장비로 전선 이도 측정하여 안 전율 진단
철탑변위 휴대용 컴퓨터, 측량기 등의 과학화 장비로 철탑 변위를 측정하 여 철탑 부재 등의 변형 여부 진단
주간코로나 주간코로나 측정기로 송전설비 코로나 발생 여부 확인하여 이 상여부 진단
(a)
(b)
Fig. 1. LineScout의 현장시험 및 수리도구. (a) LineScout 프로토타입 현장시 험[2], (b) LineArm와 Tool modules [3].
토크렌치 (③), 압축 스플라이스 저항측정기(④) 등이 로봇팔 에 장착될 수 있다 [3].
또한 , Line Scout와 같이 상용화에 성공한 라인탐상 로봇 인 Hibot Corp.의 Expliner는 carbon‐fiber의 골격으로 T자 모양의 2자유도 manipulator를 가지고 있고 송전선을 주행 중에 장애물을 만나면 manipulator를 이용하여 Counter‐
weight의 위치를 후방으로 이동시켜 전방의 pulley 세트가 무게중심 변화에 의해 들리면 선로의 바깥쪽으로 회전하면서 Expliner가 전진 이동하여 장애물을 회피하는 메커니즘을 가 지고 있다 [4].
Fig. 2는 Expliner의 주요구성과 송전선의 육안검사 결과 를 보여주고 있는데, 2대의 카메라를 이용하여 송전선의 양쪽 면과 바닥의 거울을 이용하여 송전선의 바닥면 이미지까지 보여주고 있다 [5].
중국과학아카데미 산하 선양 자동화연구소에서도 Fig. 3과 같이 500 kV 송전선로의 가공지선을 주행하면서 장애물을 승 월하며 전력설비를 촬영하는 로봇인 AApe‐B를 개발하였다 [6]. 이 외에도 중국에서 라인탐상로봇에 관한 연구개발 중이 지만 대부분 실험실 수준에서 성능을 시험하고 있다.
하지만 이러한 로봇시스템들은 선로를 자세히 점검할 수 있는 반면 선로를 주행하기 위한 구동력과 선로의 금구류나
애자 등 장애물을 회피하기 위한 복잡한 메커니즘으로 시스 템 자체가 무거운 로봇시스템을 선로에 장착하는데 어려움이 있으며 선로의 장애물을 완벽하게 회피하지 못하는 단점이 있었다. 따라서 선로를 주행하는 복잡한 메커니즘 보다 공중 에서 비행하며 점검하는 비행로봇 형태가 개발되기 시작했다.
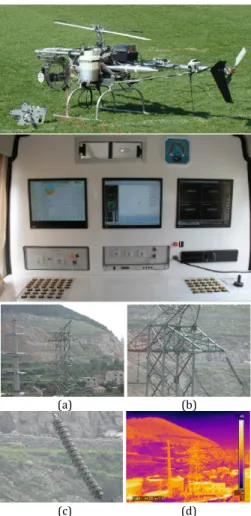
비행로봇의 경우, 선로 점검용으로 과거에는 무인헬기가 개발되었으나 최근에는 안전성이 높아진 멀티곱터 형태의 드 론이 주로 개발되고 있다. 먼저 무인헬기의 사례를 살펴보면, Fig. 4와 같이 중국 산동전력 과학연구원에서 영상 및 열화상 카메라를 탑재한 무인헬기를 개발하여 송전선로 점검에 적용 하였는데, 무인헬기 엔진에 의해 진동이 발생하여 카메라 마 운트에 대한 안정성 등의 보완이 필요했다 [7][8]. 스페인의 Deusto 대학에서는 Iberdrola 사와 함께 Fig. 5와 같이 무인 헬기를 전력선 검사에 활용하는 시스템인 RELIFO 연구를 수 행하였다 [9].
무인헬기에 비해 조종이 용이하고 안전성이 높은 드론의 경우 , 미국 EPRI는 2014년부터 송전선로 감시에 대한 드론 적용성 평가를 수행 중이고, 미국 ComEd, PPL Electric 등 7 개의 전력회사는 2015년 연방항공국으로부터 선로 점검에 드 론 활용을 허가받아 시범적용 중이다. 또한, 영국 SSE, 이탈리 아 ENEL 등 유럽 전력회사 및 멕시코에서도 선로 점검에 드 론을 시험적용 중이다 [10].
국내에서도 한전을 중심으로 송전선로의 연선작업을 비
Fig. 2. Expliner의 주요구성 및 송전선 점검결과.
Fig. 3. AApe‐B의 현장시험과 점검사진 [6].
(a) (b)
(c) (d)
Fig. 4. 산동전력 과학연구원(SEPRI)의 개발 무인헬기 및 촬영영상. (a) visible
‐light image with 2× optical zoom, (b) Visible‐light image with 20× optical zoom, (c) Enlarged view of the insulatior in (b), (d) Infrared thermal image.
롯하여 배전선로의 전력설비 점검 등에 드론을 이용하기 시 작했다 . 하지만 대부분 작업자에 의한 수동비행으로 점검이 이루어지고 있어 송전선로와 같이 설비규모가 거대하여 드론 이 점검을 위하여 가시권의 한계거리까지 비행하며 점검해야 하는 경우, 육안으로는 송전선로에 얼마나 가까이 접근하였는 지 판별하기가 어려워 드론이 선로와 충돌할 가능성이 있다.
II. 점검드론 작업환경 분석
본 논문에서는 드론이 송전선로를 점검하기 위한 작업환 경을 분석하기 위하여 현행 유인헬기의 항공점검을 참고하여 접근할 수 있다. 항공점검은 송전선로의 이상 유무와 주변상 황을 면밀히 확인하고 전력선의 단선고장 예방을 위하여 열 화상장비를 탑재하여 전선접속개소의 과열여부를 진단하는 작업으로 2017년 개정 가공송전운영업무기준에 의하면 안전 이격거리는 다음과 같다.
• 항공점검 안전이격거리 [11]
‐ 154 kV 송전선로
가) 상단 전력선으로부터 수평으로 20 m 나 ) 상단 전력선으로부터 수직으로 15 m
‐ 345 kV 송전선로
가) 상단 전력선으로부터 수평으로 20 m 나 ) 상단 전력선으로부터 수직으로 20 m
‐ 765 kV 송전선로
가 ) 상단 전력선으로부터 수평으로 40 m 나 ) 상단 전력선으로부터 수직으로 40 m
‐ 항공점검(순시 동시시행 포함) 안전이격거리 전력선으로부터 30 m (345 kV 이하 송전선로) 단, 765 kV 송전선로는 40 m
또한 , 활선작업과 항공점검의 작업 중지 조건은 각각 다 음과 같으며 드론점검에도 참고할만 하다 [11].
Fig. 7. 소형 상용 드론을 이용한 활선 작업환경 분석 시험.
Fig. 8. 송전선로 이격거리에 따른 자기장 세기 측정사례.
(a)
(b)
Fig. 5. 스페인 RELIFO Project의 무인헬기 시스템 구성도 및 적용 사례 [9].
(a) RELIFO 시스템의 구성, (b) 적용사례 및 SMS와 이메일 알림기능.
Fig. 6. 국내 연선작업 및 배전선로 전력설비 점검 드론이용 사진 [출처: 전기 신문].
• 활선작업은 다음 기상조건에서는 작업하지 않는다.
‐ 풍속이 10 m/s 이상이고, 습도가 90% 이상인 경우
‐ 작업장 주변에서 천둥, 번개가 관측되거나 들린 경우
‐ 비, 눈, 안개, 진눈깨비 등 날씨가 작업에 나쁜 경우
‐ 작업 중 날씨가 흐려지고 비가 올 듯하면 작업을 중단
• 항공점검 운항중지조건
‐ 풍속이 10 m/s 이상일 때
‐ 가시거리가 1,000 m 이내일 때
‐ 구름 높이가 지표상 304.8 m (1,000 ft) 이내일 때
‐ 눈, 비, 안개 등 기상상태 악화로 설비운영사업소장 또 는 항공기 조종사가 운항할 수 없다고 판단한 경우
‐ 항공점검 시 대지온도 상승으로 점검자가 전선접속개소 과열 여부 점검을 할 수 없다고 판단한 때
전압에 의해 전기장이, 전류에 의해 자기장이 형성되고, 코로나에 의해 가청 소음, 라디오 장해, TV 장해가 발생하는데, 이 중에서 전압에 의해 발생하는 전기장이 드론에 미치는 영 향을 직접 확인하기 위하여 Fig. 7과 같이 전력연구원 배전기 자재실험실에서 기성 드론을 이용하여 활선시험을 수행하였 다 .
Fig. 7과 같이 345 kV 선로용 현수애자련에 345 kV를 가 압한 활선상태에서 소형 상용 드론을 이용하여 애자련에 접 근시켜 접지부 접촉 시 안전성과 고압선 접촉 시의 안전성을 확인하여 보았다.
시험결과 드론이 수동조종(attitude mode)으로 고압 전 선부에 매우 근접하여 비행하거나 접지부를 포함하여 가압부 인근의 애자와 직접 접촉하였을 때에는 정상적으로 동작하였
다 . 이는 전기장이 수동조종 시의 드론 비행에는 영향을 주지 않는 것을 의미한다. 하지만, 드론이 고압 전선부에 직접 접촉 하는 순간 플래쉬오버(Flashover)가 발생하면서 드론의 원격 제어가 통제 불능 상태에 빠져 지면으로 추락하는 것을 확인 하였다. 이는 EPRI에서 수행한 Electrical Effects Testing 결과 와도 일치하는 것으로, EPRI에서는 전기장, 자기장, 코로나, 선 로에서 발생하는 아크 등은 드론의 동작에 영향을 미치지 않 지만 고압선에 직접 접촉할 경우 센서가 오동작하는 등의 충 격을 주는 것으로 보고하였다[12].
Fig. 8은 Bakhashwain의 연구를 바탕으로 380 kV 송전 선로에서 발생하는 자기장의 세기를 선로 주변 위치별로 표 현한 자기장 측정 사례로 [13], 이 그림에서 볼 수 있는 것처 럼 송전선로 인근에서는 드론 비행방향 측정의 기준이 되는 지구자기장 세기 50 µT 대비 상당한 자기장이 발생하는 것을 확인할 수 있다.
실제로 송전선로에서 발생하는 자기장이 드론에 영향을 미치는지 확인하기 위하여 활선 송전선로에서 직접 관련 시 험을 수행하였다. 아산전력지사의 협조로 765 kV 신서산‐신안 성 T/L 25~26호 경간에서 실시하였다. 자기장 영향 확인시험 에는 상용화 드론인 DJI의 인스파이어1을 사용하였으며, 가공 송전운영업무기준의 항공점검 안전이격거리를 고려하여 80 m 부터 시작해서 선로중심을 향해 5 m 간격으로 드론의 수직비 행으로 접근하며 자기장으로 인한 나침판 오작동 여부를 Fig.
10과 같이 확인하였다.
시험 결과, 드론이 선로 중심에서 345 kV 경우 15 m 이 내, 765 kV 경우 30 m 이내 비행 시 자기장 간섭이 발생하는 것을 드론의 제어화면을 통해 확인하였다.
상기 자기장 영향의 정도를 확인하기 위하여 765 kV 선 로 이격거리 25 m에서 자체 제작한 자기장 측정드론을 수직 으로 수동비행(attitude mode)하면서 자기장 세기를 측정하였 다 . 그 결과 자기장의 변동이 Fig. 11에서와 같이 각 상의 고 도에서 선로에서 가장 가까운 25 m 거리로 가장 근접하게 되 고 이때의 자기장 세기가 가장 크고 지구자기장 500 mG (=50 µT) 대비 최대 ±15~25%의 큰 변화량이 실제로 발생하 는 것을 확인하였다.
송전선로는 고소(高所), 장경간으로 인해 육안으로는 드 론이 선로에 얼마나 근접하였는지 판단하기 어렵기 때문에 송전설비와의 충돌 없이 안전한 설비점검을 위해서는 드론의 자동비행이 필수적이다. 하지만, 송전선로에 형성된 장기장은 드론의 전자식 나침판을 교란시켜 자동비행 시 비행방향을
Fig. 11. 765 kV 선로 자기장 세기 측정데이터.
Fig. 9. 드론 수직비행을 통한 거리별 자기장 영향 확인 시험.
Fig. 10. 자기장 영향으로 인한 전자식 나침판 오작동 발생.
오판하게 되어 선로와의 충돌을 야기할 수 있다.
그러므로 자기장 영향을 미치는 영역인 345 kV 선로는 중심에서 15 m, 765 kV 선로는 중심에서 30 m 이격해야 전자 식 나침판의 교란이 없는 것으로 판단되며 이 영역을 회피하 여 자동비행하며 점검할 필요가 있다.
III. 점검드론 운용체계 수립
본 논문에서는 드론을 이용한 송전선로 점검을 위하여
취득한 송전설비 동영상을 분석하여 불량을 적출하는 방식으 로 Fig. 12와 같은 순서로 점검전략을 수립하였다.
첫 번째 단계로 비행경로를 생성하기 위하여 각 철탑의 위치를 측정한다. 철탑의 좌표는 GPS 3개로 구성된 좌표측정 기를 이용하여 철탑의 가장자리 4각 지점의 GPS 좌표를 측정 하여 계산하게 되는데, 이때 철골구조물인 철탑에 의해 전파 간섭이 발생할 수 있고 이는 측정 알고리즘에 의해 보정하여 신속하고 정확하게 좌표를 측정할 수 있다 [14].
두 번째 단계는 고도측정용 드론을 이용하여 전선의 높 이를 측정한다. 한 경간을 측정한다고 가정하면 A 철탑에서 B 철탑의 선로를 따라 일정간격을 이격하여 고도측정용 드론 을 비행시켜 드론의 고도와 위치를 이용하여 전선의 몇 개점 들 (최소 5개 이상)에 대해 높이를 측정할 수 있다. 이 작업은 송전선로의 전선이 수평이 아니라 곡선 형태로 처져 있기 때 문에 점검드론이 전선이 처져있는 형태를 따라 비행하며 고 배율카메라와 열화상 카메라를 이용하여 송전선로를 보다 용 이하게 점검할 수 있다. 또한, 전선의 고도는 절대고도가 아니 라 상대적인 고도로 드론이 이륙한 곳을 기준으로 고도를 측 정하여야 함에 유의해야 한다. 드론의 고도센서는 기압계 (barometer)를 사용하여 기압차에 의해 고도를 인식하기 때 문에 절대고도를 사용할 수 없다. 그러므로 기상환경에 따라 드론의 고도정보가 조금씩 달라질 수 있는데, 이는 점검드론 의 짐벌의 조종을 통하여 보정할 수 있다.
세 번째 단계로 비행경로를 생성하는 단계로 첫 번째와 두 번째 작업에서 측정된 데이터를 이용하여 점검드론의 비 행경로를 계산할 수 있다. 앞서 언급된 송전선로의 자기장 영 향을 회피하기 위하여 송전선로로부터 일정거리를 이격하여 비행경로를 생성할 필요가 있다. 앞서 언급된 데이터를 근간 으로 안전 마진거리(15 m)를 고려하여 선로별로 자기장 간섭 을 받지 않는 점검드론의 안전비행 이격거리를 Fig. 13, 14와 같이 345 kV 선로는 30 m (15 m+15 m)로, 765 kV 선로는 45 m (30 m+15 m)로 설정하였으며, 154 kV 선로는 345 kV 선로 에 준하는 것으로 설정하였다.
점검드론의 비행경로를 생성하기 위해서는 고도측정용 드론으로 측정한 고도와 좌표 데이터를 이용하여 측정된 고 도가 전선의 어느 위치의 고도인지를 계산하여야 한다. 이는 Fig. 15에서와 같이 철탑 A, B 사이의 경간을 수동조종에 의해 비행하는 드론으로 고도측정 시 측정지점 모두가 경간으로부 터 정확하게 일정거리 이격하기 어렵기 때문이다. 따라서 Fig.
16에서와 같이 기준점이 되는 A 철탑과 드론 좌표 간의 거리 (R)와 경간과 드론의 위치가 이루는 사잇각(ϕ) 등을 이용하 여 A 철탑 기준으로 Pt1간의 거리(D)를 계산하고 이로부터 해당 지점에서의 고도와 경로를 생성할 수 있다.
Ed William의 공식에 의해 GPS 좌표 이동에 필요한 공식 은 아래와 같이 정리할 수 있으며, 라디안 값을 사용하여 계
⇩
⑥ 취득영상 관리와 분석 ․ 선로별 점검이력 관리 및 불량사항 적출 Fig. 12. 송전선로 점검드론 운용절차.
Fig. 13. 345 kV 선로 안전비행 이격거리 설정.
Fig. 14. 765 kV 선로 안전비행 이격거리 설정.
산하였다 .
두 GPS 좌표에 대한 거리 계산식:
D
2 sin sin
2 cos cos sin
2
두 GPS 좌표에 대한 각도 계산식(정북, 0° 기준)
θ
tan cos
cos sin sin cos cos
거리와 각도를 반영한 위도, 경도 이동좌표 계산식
Lat sin sin cos cos sin cos
Long Long tan cos sin sin
sin sin cos
네 번째 단계로 3단계에서 도출한 GPS좌표와 상대고도 로 구성된 비행경로를 GCS에 입력하면 GCS 내에서 철탑과 송전선로를 지도에 표시하고 비행경로를 사전에 확인하여 안 전한 비행이 될 수 있도록 절차를 마련하였다.
다섯 번째 단계는 실제 드론을 이용하여 송전선로를 점 검하는 단계로 점검드론이 GCS에 입력된 경로를 따라 자동으 로 비행하며 고배율카메라와 열화상카메라를 이용하여 송전 선로의 동영상을 취득하는 작업을 수행한다. 여기서, 고도측정 용 드론의 기압계에 의해 측정된 고도데이터의 오차는 카메 라 짐벌을 작업자가 수동으로 조종함으로써 보정할 수 있다.
또한 , 전력연구원에서 개발한 GCS는 가장 많이 사용되고 있는 A3 FC(Flight Controller)를 탑재한 상용드론은 모두 연
계가 가능하여 다양한 상용드론을 점검드론으로 활용이 가능 하다 . GCS는 PC용 GCS와 모바일용 K‐GCS(iOS용으로 개발되 어 있음)로 구성되어 있으며 Fig. 17과 같이 구조로 통신한다.
위급상황에서 수동조종할 수 있는 메인조종기(Master Remote Controller)와 점검드론은 LBA(Light Bridge Access) 를 통하여 연결되고 메인조종기와 페어링 된 종속조종기 (Slave Remote Controller)는 모바일용 K‐GCS(CMD Converter) 가 연결된다. 모바일용 K‐GCS와 PC용 GCS를 같은 무선랜 (WiFi)하에 연결하면 PC용 GCS에 입력한 비행경로 명령을 무선 랜을 통해 K‐GCS에 전송할 수 있다. 모바일용 K‐GCS는 전송받은 명령을 변환하여 조종기를 통해 점검드론에 비행명 령을 전달하면 점검드론이 자동으로 비행하며 송전선로를 점 검할 수 있다.
여섯 번째 단계는 점검드론이 취득해온 고화질영상과 열 화상 영상을 통합 관리시스템에 저장하고 이 영상을 분석·진 단하는 단계이다. 대형 모니터를 이용하여 분석자가 해당 영 상을 직접 분석하며 설비결함을 찾아낼 수 있다.
IV. 송전선로 드론점검 현장시험
앞서 수립한 점검드론 운용체계를 기반으로 실제 송전선 로 현장에서 드론점검을 수행하여 보았다. 송전선로 드론점검 에 사용한 상용 기체는 Fig. 18과 같이 DJI사의 A3의 FC (Flight Controller)를 사용하는 산업용 기체로 짐벌에 장착된 고배율카메라와 열화상 카메라로 흔들림 없는 영상을 얻기에
Fig. 16. 드론의 송전선 투영점 Pt1에 대한 도식.
Fig. 17. GCS와 점검드론과의 통신구조.
Fig. 15. 고도측정용 드론 위치.
충분했다. 또한, 정확한 철탑좌표와 점검드론 이착륙지의 좌표 를 얻기 위해서 Fig. 19와 같이 3개의 GPS로 구성되어 보정 알고리즘이 적용된 좌표측정기를 사용하였다 [14]. 또한, 송전 선로의 처짐 높이를 측정하기 위하여 Fig. 20과 같이 완제품 형태의 상용 드론(인스파이어1)을 이용하여 Fig. 21과 같이 고도측정용 드론 카메라화면 중앙에 선로를 위치시켜 드론의 고도와 좌표를 취득하여 송전선로의 각 지점에 대한 고도데 이터를 계산하였다.
상기와 같이 측정한 철탑좌표 및 이착륙지의 좌표, 송전 선로의 고도데이터 등을 이용하여 점검드론용 비행경로를 계 산하여 GCS에 입력하면 Fig. 22와 같이 점검드론의 비행경로 를 GCS에서 3차원으로 모델링 된 지도위에서 확인할 수 있다.
안전한 비행을 위하여 비행 전에 점검드론의 비행경로가 자 기장 펜스 밖에 위치하고 있는지 확인하고 고배율카메라와 열화상카메라를 탑재한 드론을 이용하여 안전한 비행경로를 따라 송전선로 및 송전설비의 점검영상을 취득하였다.
상기와 같이 송전선로 드론점검 운용체계에 따라 154 kV 아산‐예산 T/L 23‐27, 345 kV 아산‐화성 T/L 11‐15, 765 kV 신서산 ‐신안성 T/L 34‐38 등 15기 철탑에 대하여 점검을 수 행하였다 . 드론점검 중 비행속도는 너무 빠르면 깨끗한 영상 을 얻기 힘들고 너무 느리면 깨끗한 영상은 얻을 수 있지만, 드론의 배터리 한계로 한 경간의 점검을 완료할 수 없었다.
여러 번의 현장시험 시행착오를 통해 2~4 m/s의 비행속도가 적당한 속도임을 도출하였다. 경간 거리나 가공지선인지 전선 인지 등 현장상황에 따라 2~4 m/s의 속도 범위 내에서 속도 를 달리하며 드론점검을 수행하였다. 또한, 철탑 위치에서는 주요설비가 있어 점검드론이 호버링(Hovering)하며 자세히 촬영하고 일부 설비불량이 의심되는 지점에서도 호버링하여 정밀점검을 수행하였다. 송전선로 드론점검 현장시험 결과
Table 3, 4와 같이 13개소의 설비불량 및 조치사항을 찾아내 었다 . 열화상카메라에 의한 과열개소는 발견되지 않았다. 대부 분 설비불량은 건설된 지 오래된 154 kV 및 345 kV 선로에 서 발견되었고 765 kV 선로에는 새둥지가 대부분이었다.
V. 결론 및 향후 계획
송전선로 드론점검 시범적용의 일환으로 수행된 이번 현 장시험은 드론을 이용하여 송전선로 점검한 국내 첫 번째 사 례로 선로의 자기장 구역을 회피하여 자동비행으로 안전한 점검을 수행했다는 의미가 있다. 본 논문에서 제시한 송전선 로 점검드론 운용체계로 대전충남지역 15기의 철탑경간을 점 검하면서 자기장에 의해 점검드론이 경로를 벗어난 케이스가 없었다 . 특히, 이번 현장시험을 통해 송전선로 드론점검은 강 횡단 선로나 산간지역에 위치한 선로 등 작업자 접근이 어려 운 구역에 적용하기 매우 효율적인 점검방안임을 확인하였다.
하지만 , 송전선로 점검드론 운용체계는 적용 초기이고 이 번 현장시험을 통해 몇 가지 개선점을 도출하였다. 먼저, 현재 드론점검에는 드론이 자동으로 비행하지만, 고배율카메라와 열화상카메라가 장착된 카메라 짐벌은 작업자가 수동으로 조
Fig. 20. 송전선로 고도측정용 드론.
Fig. 21. 고도측정 사례.
Fig. 22. 345 kV 아산‐화성 T/L 11‐12 비행경로.
Fig. 18. 송전선로 점검드론.
Fig. 19. 철탑 GPS좌표측정용 좌표측정기.
종하여 송전선로를 촬영하고 있다. 이 부분은 비전기반으로 카메라 짐벌이 송전선로를 자동으로 추적하도록 자동화하여 작업자의 작업량을 줄여 보다 효율적인 점검이 가능하도록 개발 중에 있다. 또한, 현재 점검영상을 분석하는데 분석자가 촬영영상 시간만큼 영상을 보며 분석해야 하므로 상당한 시 간이 소요된다. 이 부분 역시 자동으로 선로점검 동영상을 분 석하여 결함으로 의심되는 부분을 분석자에게 알려주어 의심 부분만 분석자가 확인하여 진단할 수 있도록 개발 중에 있으 며 향후 분석시간을 매우 단축할 수 있을 것으로 기대된다.
REFERENCES
[1] 한국전력공사 전력연구원, “송전선로 감시진단용 생체모방 드론 시스템 개발(세부과제)(1단계 중간보고서)”, pp.19~20, 2017.
[2] N. Pouliot and S. Montambault, “Geometric Design of the LineScout, a Teleoperated Robot for Power Line Inspection and Maintenance,” IEEE International Conference on Robotics and Automation, pp. 3970~3977, 2008.
[3] N. Pouliot and S. Montambault, “LineScout Technology: From Inspection to Robotic Maintenance on Live Transmission Power Lines,” IEEE International Conference on Robotics and Automation, pp. 1034~1040, 2009.
[4] P. Debenest, M. Guarnieri, K. Takita, E. F. Fukushima, S. Hirose, K. Tamura, A. Kimura, H. Kubokawa, N. Iwama and F. Shiga,
“Expliner‐Robot for Inspection of Transmission Lines,” IEEE International Conference on Robotics and Automation, pp.
3978~3984, 2008.
[5] P. Debenest and M. Guarnieri, “Expliner‐From Prototype Towards a Practical Robot for Inspection of High‐Voltage Lines,”
International Conference on Applied Robotics for the Power Industry, 2010.
[6] H. Wang, F. Zhang, Y. Jiang, G. Liu and X. Peng, “Development of an Inspection Robot for 500kV EHV Power Transmission Lines,”
IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 5107~5112, 2010.
[7] B. Wang, L. Han, H. Zhang, Q. Wang and B. Li, “A Flying Robotic System for Power Line Corridor Inspection,” IEEE International Conference on Robotics and Biomimetics, pp.
2468~2473, 2009.
[8] B. Wang, X. Chen, Q. Wang, L. Liu, H. Zhang and B. Li, “Power Line Inspection with A Flying Robot,” International Conference on Applied Robotics for the Power Industry, 2010.
[9] J. I. Larrauri, G. Sorrosal and M. González, “Automatic System for Overhead Power Line Inspection using an Unmanned Aerial Vehicle ‐RELIFO Project‐”, International Conference on Unmanned Aircraft Systems, pp. 244~252, 2013.
[10] L. F. Luque‐Vega, B. Castillo‐Toledo and A. Loukianov, “Power Line Inspection Via an Unmanned Aerial System Based on the Quadrotor Helicopter,” IEEE Mediterranean Electrotechnical Conference, pp. 393~397, 2014.
[11] 한국전력공사 송변전운영처, 가공송전운영업무기준, H0‐송변‐기 준‐0002, 2017.01.31.(개정)
[12] Fabio Bologna, “UAS Research – Results of Electrical Effects Testing,” EPRI, February 2017.
[13] J. M. Bakhashwain, M. H. Shwehdi, U. M. Johar and A. A. AL‐Naim,
“Magnetic Fields Measurement and Evaluation of EHV
Transmission Lines in Saudi Arabia,” International Conference on Non‐Ionizing Radiation at UNITEN(ICNIR 2003), October 2003.
[14] Seok‐tae Kim, Joon‐young Park, Jae‐kyung Lee, In‐hyuk Choi, Ji‐
wan Ham, “Development of GPS Coordinates Measuring Algorithm for Transmission Tower” KEPCO Journal on Electric Power and Energy, Vol. 3, No. 2, December 2017.
Table. 3. 154 kV 및 345 kV 선로의 점검결과 전압/
선로명 경간 풍속 (m/s)
지자기 교란
결함 위치
결함
설비 결함 사진
154 kV 아산‐
예산 23~24
(우) 1.5 G0 24 (하) SB 댐퍼
24~25
(우) 2.6 G0
25 (중) 삼각링크 취부방향
불량
24~25 (상) 전력선
345 kV 아산‐
화성 11~12
(우) 2.1 G0 11~12 (하) 전력선
11~12
(우) 2.1 G0 11 (중) 새 둥지
13~14
(좌) 3.7 G0 13~14 (탑)
가공지선 불량
14~15
(우) 2.1 G0 14 (중) 아머로드
취부
불량
Table. 4. 154 kV 및 345 kV 선로의 점검결과 전압/
선로명 경간 풍속 (m/s)
지자기 교란
결함 위치
결함
설비 결함 사진
765 kV 신서산
‐ 신안성
34~35
(우) 3.6 G0 34 (하) 새 둥지
34~35
(좌) 2.0 G0 34 (하) 새 둥지
36~37
(우) 6.2 G0 37 (탑) SB 댐퍼
36~37 (좌)
2.0 G0 37 (하) 새 둥지
2.0 G0 36
(중)~(하) 새 둥지
37~38
(우) 2.0 G0 38
(상)~(중) 새 둥지
결 함 합 계 13 개소
![Fig. 1. LineScout의 현장시험 및 수리도구. (a) LineScout 프로토타입 현장시 험[2], (b) LineArm와 Tool modules [3].](https://thumb-ap.123doks.com/thumbv2/123dokinfo/4900461.291459/2.960.81.476.101.770/linescout의-현장시험-수리도구-linescout-프로토타입-현장시-linearm와-modules.webp)
![Fig. 5. 스페인 RELIFO Project의 무인헬기 시스템 구성도 및 적용 사례 [9].](https://thumb-ap.123doks.com/thumbv2/123dokinfo/4900461.291459/4.960.492.885.99.260/스페인-relifo-project의-무인헬기-시스템-구성도-적용-사례.webp)
