133
Long Distance and High Resolution Three-Dimensional Scanning LIDAR with Coded Laser Pulse Waves
Gunzung Kim1 and Yongwan Park2†
1Department of Multimedia and Communication Engineering, Yeungnam University,
2Department of Information and Communication Engineering, Yeungnam University, 280 Daehak-ro, Gyeongsan, Gyeongbuk 38541, Korea
(Received June 1, 2016; Revised manuscript June 29, 2016; Accepted June 30, 2016)
This paper presents the design and simulation of a three-dimensional pixel-by-pixel scanning light detection and ranging (LIDAR) system with a microelectromechanical system (MEMS) scanning mirror and direct sequence optical code division multiple access (DS-OCDMA) techniques. It measures a frame with 848×480 pixels at a refresh rate of 60 fps. The emitted laser pulse waves of each pixel are coded with DS-OCDMA techniques. The coded laser pulse waves include the pixel’s position in the frame, and a checksum. The LIDAR emits the coded laser pulse waves periodically, without idle listening time to receive returning light at the receiver. The MEMS scanning mirror is used to deflect and steer the coded laser pulse waves to a specific target point. When all the pixels in a frame have been processed, the travel time is used by the pixel-by-pixel scanning LIDAR to generate point cloud data as the measured result.
Keywords: LIDAR, DS-OCDMA, Time-of-Flight, Scanning Sensor, Laser Radar
OCIS codes: (280.3640) Lidar; (060.2605) Free-space optical communications; (280.3400) Laser range finder
레이저 펄스 부호화를 이용한 원거리 고해상도 3D 스캐닝 라이다
김건정1ㆍ박용완2†
1영남대학교 멀티미디어통신공학과
우 38541, 경북 경산시 대학로 280
2영남대학교 정보통신공학과
우 38541, 경북 경산시 대학로 280
(2016년 6월 1일 받음, 2016년 6월 29일 수정본 받음, 2016년 6월 30일 게재 확정)
본 논문에서는 DS-OCDMA(direct sequence optical code division multiple access)와 스캐닝 방식의 MEMS (microelectromechanical system) 거울을 이용하여 픽셀별로 스캐닝하는 라이다 시스템(light detection and ranging, LIDAR)의 설계와 시뮬레이션 결과를 기술한다. 제안하는 라이다는 848×480 해상도의 거리 영상을 1초에 60번 측정한다. 영상을 구성하는 각각의 픽셀마다 픽셀 정보 와 체크섬을 DS-OCDMA로 부호화한 레이저 펄스로 방출하므로, 반사파를 검출하기 위하여 대기할 필요없이 연속으로 거리 측 정이 가능하다. MEMS 거울은 부호화된 레이저 펄스를 반사하여 측정을 원하는 방향으로 보내기 위한 용도로 사용한다. 하나의 거리 영상을 구성하는 픽셀 정보의 처리가 모두 완료되면, 픽셀 개개의 반사파 비행시간을 이용하여 포인트 클라우드를 생성한다.
Keywords: 라이다, 광부호분할다중접속, 비행시간, 스캐닝 센서, 레이저 레이다
OCIS codes: (280.3640) Lidar; (060.2605) Free-space optical communications; (280.3400) Laser range finder
†E-mail: [email protected]
Color versions of one or more of the figures in this paper are available online.
I. 서 론
2005년 DARPA(Defense Advanced Research Projects Agency)
그랜드 챌린지에서 스탠포드의 자율주행 자동차인 스탠리가 최초로 모바일 라이다(Light Detection And Ranging, LIDAR) 를 탑재하여 우승하였다. 모바일 라이다는 실시간으로 주변 DOI: http://dx.doi.org/10.3807/KJOP.2016.27.4.133
므로, 높은 각 해상도와 거리 해상도로 생성된 정확한 맵이 필수이다.[1-3]
모바일 라이다는 레이저를 방출한 후 물체에 반사되어 검 출될 때까지 비행시간(Time of Flight, ToF)을 측정하여 물체 까지 거리를 계산한다. 모바일 라이다는 레이저의 변조 방법 과 시간을 측정하는 방법에 따라 세 가지 방식으로 나눈다.
식(1)에 나타낸 바와 같이 펄스파(Pulse Wave)를 방출한 후 검출한 시간 차이를 측정하는 펄스 방식, 연속파(Continuous Wave)를 방출할 때와 검출할 때의 위상차(Phase Difference) 를 이용하는 AMCW(Amplitude Modulated Continuous Wave) 방식, 연속파를 방출할 때와 검출할 때의 주파수차(Frequency Difference)를 이용하는 FMCW(Frequency Modulated Continuous Wave) 방식으로 구분된다. FMCW 방식의 라이다는 근거리 측정에 적합하고, AMCW 방식의 라이다는 중거리 측정, ToF 방식의 라이다는 장거리 측정에 유리한 특성이 있다. 라 이다는 거리 측정 방식에 상관없이 측정 거리가 멀어짐에 따 라 정밀도가 떨어진다는 단점이 있다.[4-7]
(1)
모바일 라이다는 거리 측정하는 방향(Bearing)으로 레이저 를 방출하는 형태에 따라 스캐닝(Scanning) 라이다와 플래시 (Flash) 라이다로 구분한다. 모바일 라이다는 레이저의 최대 허용 노출량(Maximum Permissible Exposure, MPE)이 1급 레이저 제품(Class 1 Laser Product)을 준수하도록 제작되어, 레이저의 방출 형태에 상관없이 레이저의 최대 출력은 비슷 하다. 스캐닝 라이다는 거리 측정하는 방향으로 레이저 빔을 방출한 후, 물체에 반사된 파형을 분석하여 거리를 측정한다.
측정을 원하는 모든 방향으로 레이저 빔을 하나씩 방출한 후, 일정시간 대기(Idle Listening Time)하면서 수신한 반사파 를 검출하여 분석하는 과정을 차례대로 동일하게 수행한다.
각각의 측정 방향마다 평행 빔(Collimated Beam)을 방출하므 로 먼 거리까지 거리 측정이 가능하지만, 측정을 원하는 모 든 방향에 대하여 레이저 방출과 검출을 차례대로 수행하여 측정 가능한 전체 영역에 있는 측정 방향의 개수에 비례하여 측정 시간이 증가한다. 스캐닝 라이다에서 레이저 빔을 방출 한 후 반사파를 검출하기 위하여 대기하는 시간은 측정 가능 한 최대 거리에 비례하여 증가한다.[4-6,8]
플래시 라이다는 레이저를 비전 카메라의 플래시램프와 비 슷한 방법으로 사용한다. 비전 카메라는 촬영을 원하는 방향 으로 플래시램프를 터트리면서, 영상을 촬영한다. 플래시 라 이다는 빔 확대기(Beam Expander)를 이용하여 레이저를 플 래시램프처럼 넓게 분산시켜 거리 측정할 방향으로 방출한 후, 일정시간 대기하면서 수신된 반사파들을 분석하여 거리 를 측정한다. 측정하는 모든 영역으로 동시에 레이저를 방출
에 균등하게 분산하므로 측정 거리에 따른 레이저 감쇄가 심 하게 발생하여 측정 거리가 매우 짧다. 플래시 라이다도 레 이저 빔을 방출한 후 반사파를 검출하기 위하여 대기하는 시 간은 측정 가능한 최대 거리에 비례하여 증가한다.[9,10]
대부분의 모바일 라이다는 시간을 측정하는 세 가지 방법 중에서 하나를 선택하고, 레이저를 방출하는 두 가지 형태 중에서 하나를 선택한 조합으로 구성된다. 구글의 자율주행 자동차를 비롯한 대부분의 자율주행자동차는 원거리 측정에 유리한 펄스 형태의 스캐닝 라이다를 사용하여 주행 가능한 정보인 국부 지도(Local Map)를 생성한다. 가장 대표적인 펄 스 방식의 3D 스캐닝 라이다인 벨로다인(Velodyne)의 HDL-64E 는 120 m 거리에 있는 64개 장소를 동시에 측정할 수 있으 며, 0.08° 단위로 회전하면서 360° 측정이 가능하고, 거리 영 상의 1초당 재생률은 5 Hz이다. 펄스 방식의 플래시 라이다 인 ASC의 페러그린(Peregrine)은 70 m 거리에 있는 128×32개 장소를 동시에 측정할 수 있으며, 가로 30°, 세로 7.5°의 시 야각(Field-of-View, FoV)으로 전방을 측정하고, 거리 영상의 1초당 재생률은 30 Hz이다.
본 논문에서는 60 Hz의 재생률로 전방 150 m 거리에 있는 846×480개 장소를 순차적으로 측정하는 스캐닝 라이다를 제 안한다. 제안하는 라이다는 DS-OCDMA(Direct-Sequence Optical Code Division Multiple Access) 기술로 부호화한 레이저 펄 스를 각각의 측정 방향마다 방출하며, 반사파를 검출하기 위 하여 대기할 필요가 없다. 각 방향마다 방출하는 레이저 펄 스는 픽셀(Pixel) 위치와 오류 검출을 위한 체크섬(Checksum) 으로 구성된다. 2장에서 제안하는 라이다에 대하여 설명하 고, 3장에서 시뮬레이션 결과를 기술하고, 4장에서 결론을 기술한다.
II. 부호화 펄스를 이용한 3D 스캐닝 라이다 기존의 스캐닝 라이다와 플래시 라이다는 레이저를 방출한 후, 물체에 부딪히고 되돌아 온 반사파를 검출하기 위하여 대기하는 시간이 반드시 필요하다. 라이다는 비행시간을 이 용하여 물체까지 거리를 측정하므로 반사파 대기 시간은 최 대 측정 거리에 비례하여 증가한다. 측정 거리가 멀어짐에 따라 방출된 레이저가 물체까지 가는 시간과 반사되어 되돌 아오는 시간이 정비례하여 증가한다. 라이다는 대기 시간 동 안 레이저 신호를 수신할 수 있어서 한 개가 아닌 여러 개의 반사파를 수신할 수 있고, 다른 라이다에서 방출한 레이저도 수신할 수 있다. 수신된 반사파에 대한 구분을 전혀 할 수 없 으므로 수신된 모든 반사파의 비행시간을 기록하거나, 가장 처음이나 마지막에 수신된 반사파의 비행시간만 기록한다.
장거리 측정에 많이 사용하는 펄스 방식의 스캐닝 라이다 는 측정하는 방향마다 레이저 펄스 방출과 일정시간 대기 후 반사파 검출을 반복한다. 한 방향에 대한 거리 측정에 필요
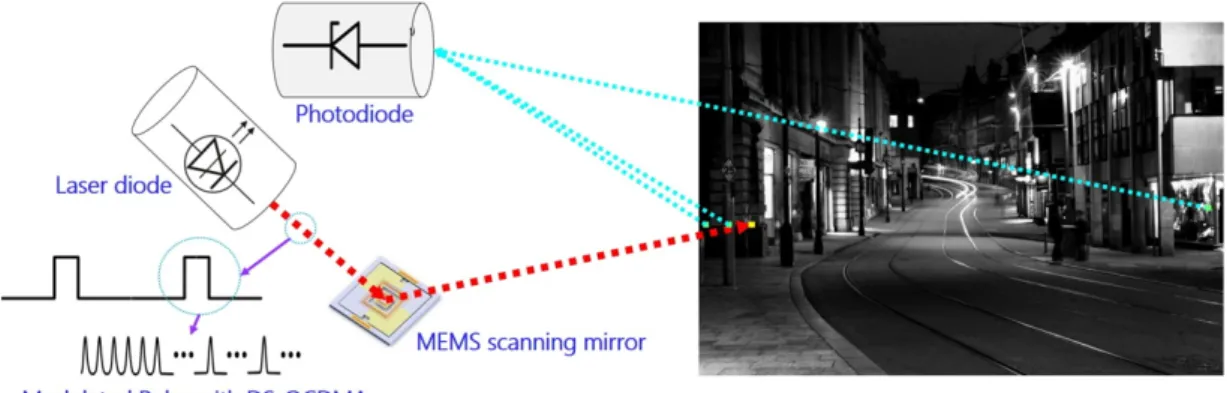
FIG. 1. Overall system of the proposed 3D scanning LIDAR.
FIG. 3. Data transmission and reception sequence.
FIG. 2. Micropulses and macropulses used in the proposed LIDAR.
한 최소 시간은 측정하는 방향으로 레이저를 회전하는 시간, 레이저 펄스를 생성하여 방출하는 시간, 반사파 수신을 위한 대기 시간, 검출된 반사파의 신호 처리 시간에 따라 결정된 다. 이 중에서 최대 측정 거리에 의해 결정되는 반사파 수신 을 위한 대기 시간이 가장 큰 비중을 차지한다. 스캐닝 라이 다에서 3D 거리 영상의 1초당 재생률, 최대 측정 거리, 측정 방향의 개수가 상호 종속 관계에 있어서, 세 가지 요소 중에 서 어느 하나를 증가시키면 다른 두 가지 요소는 줄어드는 특성이 있다. 최대 측정 거리를 증가시키면 모든 측정 방향 에서 거리 측정에 필요한 최소 시간이 증가하여 1초에 측정 할 수 있는 방향의 개수가 감소하므로, 거리 영상의 1초당 재생률이나 측정 방향 개수를 감소시켜야 한다.
본 논문에서 제안하는 스캐닝 라이다는 Fig. 1과 같이 각각 의 방향마다 픽셀 위치를 DS-OCDMA 기술로 부호화한 레 이저 펄스를 방출한다. 각각의 측정 방향마다 방출하는 부호 화된 펄스는 Fig. 2처럼 여러 개의 미세한 마이크로펄스가 합쳐진 한 개의 매크로펄스 형태이다. 방출한 장치와 픽셀 위치를 구분할 수 있는 식별 번호가 레이저 펄스에 포함되어 있어서, 수신한 반사파를 복조하면 레이저 펄스를 방출한 장 치와 픽셀 위치를 인식할 수 있다. 픽셀 위치를 이용하여 레 이저 펄스가 방출된 방향과 시간을 알게 되어 레이저를 반사 한 물체까지 거리를 계산한다. 수신한 반사파의 픽셀 위치를
이용하면 레이저를 방출한 후 반사파를 수신할 때까지 대기 하지 않고 다음 방향을 측정할 수 있어서, 한 방향에 대한 거리 측정에 필요한 최소 시간이 측정 거리와 무관하다. 제 안하는 스캐닝 라이다는 최대 측정 거리가 설계에 영향을 미 치지 않아서, 3D 거리 영상의 1초당 재생률과 측정 방향의 개수만 반비례 관계에 있게 된다.
측정하는 방향에 레이저 펄스를 방출한 후 물체가 있는 거 리에 따라 수신할 때까지 시간이 결정되므로, 여러 방향으로 방출한 레이저 펄스의 반사파들을 동시에 수신하는 경우도 발생한다. 방출한 레이저 펄스는 DS-OCDMA 기술로 부호화 되어 다른 레이저 펄스와 직교(Orthogonal)하므로, 동시에 여 러 개의 반사파를 수신해도 모두 구분되어 원래의 정보로 복 조가 가능하다. 제안하는 스캐닝 라이다는 Fig. 3과 같이 상 호 독립적으로 동작하는 송신부와 수신부로 구성된다. 송신 부는 픽셀 위치에 대한 비트 스트림(Bit Stream)을 DS-OCDMA 기술로 부호화한 후 광변조기(Optical Modulator)를 이용하여 레이저 펄스를 생성한 후 방출하고, 스캐닝 방식의 MEMS (Microelectromechanical Systems) 거울을 이용하여 측정할 방향으로 반사한다. 수신부는 수신된 반사파를 TDC(Time-to- Digital Converter)를 이용하여 디지털화한 후 DS-OCDMA 기술로 복조하고, 측정 방향에 따른 방출 시간을 이용하여 레이저 펄스의 비행시간과 물체까지 거리를 계산한다.
FIG. 4. Bit steam format.
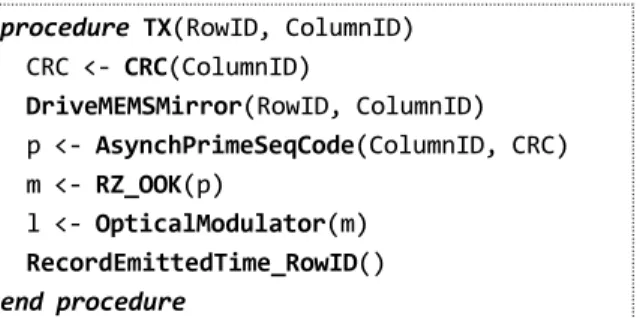
DriveMEMSMirror(RowID, ColumnID) p <- AsynchPrimeSeqCode(ColumnID, CRC) m <- RZ_OOK(p)
l <- OpticalModulator(m) RecordEmittedTime_RowID() end procedure
FIG. 5. The transmission procedure in the TX part.
2.1. 레이저 펄스의 구성
라이다 장치는 측정 방향마다 그에 해당하는 픽셀 위치를 나타내는 열 식별 번호를 생성한다. 반사파를 수신한 후 복 조한 데이터의 오류 검출을 위해 열 식별 번호를 이용하여 생성한 체크섬이 추가된다. 각각의 레이저 펄스는 Fig. 4와 같이 10비트의 열 식별 번호와 3비트의 체크섬이 조합된 13 비트로 구성된다.
한 개의 거리 영상은 848×480개 장소에 대한 측정 결과로 구성되며, 848개 열을 구별하기 위한 열 식별 번호는 10비트 를 사용한다. 레이저 펄스를 방출할 때 열 식별 번호를 행 번호와 방출 시간과 함께 기록하면, 수신한 반사파에 포함된 열의 식별 번호를 이용하여 행 번호와 방출 시간을 알 수 있 다. 레이저 펄스의 방출 시간과 수신 시간 차이를 이용하여 비행시간을 계산하고, 이를 통해 물체까지 떨어진 거리를 계 산한다. 송신부는 레이저 펄스를 방출하면서 방출 시간을 기 록하고, 수신부는 반사파의 정보를 이용하여 비행시간과 거 리를 계산하여 송신부와 수신부가 상호 독립적으로 동작한 다. 기존의 라이다의 경우 레이저 펄스를 방출한 후 반사파 를 수신하기 위하여 반드시 최대 측정 거리를 왕복 비행하는 시간보다 길게 대기해야 한다. 제안하는 라이다는 레이저 펄 스를 방출한 후에 반사파를 수신할 때까지 대기할 필요가 없 으므로, 송신부는 측정 가능한 모든 방향에 대하여 최대 측 정 거리와 상관없이 순차적으로 레이저를 방출한다.
수신부는 복조할 데이터의 오류 검출하기 위하여 3비트 CRC(Cyclic Redundancy Check)를 체크섬으로 사용한다. 수 신한 반사파를 복조한 후 3비트 CRC 알고리즘을 이용하여 수신 데이터에 오류가 있는 지 확인한다. 수신 데이터에 오 류가 있을 경우 폐기하고, 없을 경우에만 장치 식별 번호와 행 및 열 식별 번호를 이용한 처리 과정으로 진행한다. 3비 트 CRC의 다항식은 식 (2)로 표현한다.[11, 12]
(2)
2.2. 송신부
제안하는 스캐닝 라이다의 송신부는 Fig. 5에서 알고리즘 형태로 기술한 과정에 따라 각 단계를 수행한다. 장치 고유 의 식별 번호와 함께 각각의 측정 방향에 해당하는 픽셀의 848개의 열을 구분하는 10비트 열 식별 번호와 3비트 체크 섬을 조합한 13비트 스트림을 생성한다. 비트 스트림을 다른 레이저 펄스와 직교가 되도록 DS-OCDMA 기술인 1차원 단
극성 비동기식 프라임 시퀀스 코드(1D Unipolar Asynchronous Prime Sequence Code)로 대역 확산(Spread Spectrum)을 한 후 제로-복귀 온-오프변조(Return-to-Zero On-Off Keying, RZ-OOK) 방법으로 디지털 변조한다. 단극성의 DS-OCDMA 기술은 부 호화할 비트가 ‘1’일 경우에만 해당하는 이진 코드워드를 전 송한다. 디지털 데이 터는 광변조기를 이용하여 320 GHz의 칩 속도(Chip Rate)로 레이저 펄스를 생성하여 방출하고, MEMS 거울을 이용하여 측정할 방향으로 반사한다.[13-18]
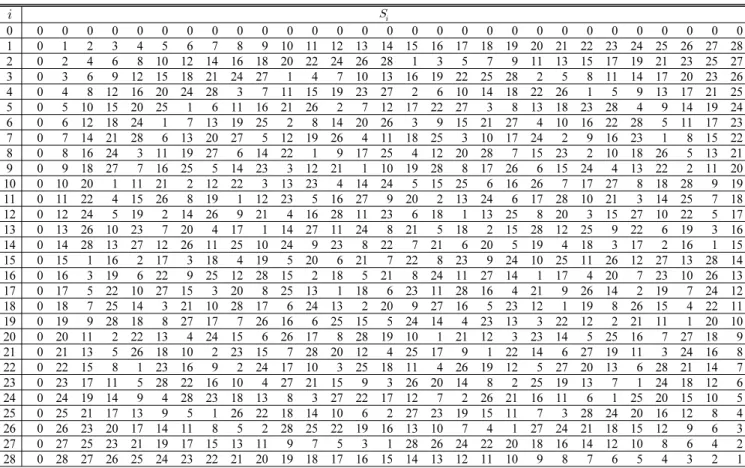
비동기식 프라임 시퀀스 코드는 방출하는 레이저 펄스의 직교를 위하여 비트 스트림을 부호화하고 대역 확산하는 용 도로 사용한다. 서로 다른 라이다들이 방출하는 레이저 펄스 를 비동기식 프라임 시퀀스 코드로 부호화하면, 하나의 수신 기에 동시에 여러 개의 반사파가 수신되어도 각각의 레이저 펄스를 분리하여 인식한다. 전방 150 m 거리에 있는 물체의 거리를 측정하는 민감도를 가질 경우, 최대 25개의 픽셀에 해당하는 레이저 펄스가 동시에 수신될 수 있다. 이들을 모 두 구분하기 위해서는 25개 이상의 다른 코드워드를 사용해 야 한다. 소수 29를 사용하는 1차원 단극성 비동기식 프라임 시퀀스 코드는 유한체(Galois Field) GF(29)상의 원소로서 길 이는 841, 웨이트(weight)는 29이고, 29개의 서로 다른 코드 워드를 표현한다. 13비트 스트림은 각 비트마다 841칩의 이 진 코드워드를 곱하여 대역 확산하면 10933개의 신호가 생 성된다. 13비트 스트림에서 비트의 값이 ‘1’일 경우에는 해 당 비트가 841 칩의 해당하는 이진 코드워드 로 변환되고,
‘0’일 경우에는 841칩만큼 ‘0’으로 변환된다. 소수 29를 사용 하는 프라임 시퀀스 의 각 요소
는 식 (3)으로 표현하고, 그 결과는 Table 1과 같다.[15-17]
mod (3)
프라임 시퀀스 가 사상되는 이진 코드워드
의 각 요소 는 식 (4)로 표현하고, 프라임 시퀀 스 의 요소인 의 이진 코드워드는 Table 2와 같다.
i f for
otherwise (4)
Table 1과 Table 2에서 알 수 있듯이 비동기식 DS-OCDMA
TABLE 1. Prime sequences over GF(29) of a prime number 29
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28
2 0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 1 3 5 7 9 11 13 15 17 19 21 23 25 27
3 0 3 6 9 12 15 18 21 24 27 1 4 7 10 13 16 19 22 25 28 2 5 8 11 14 17 20 23 26
4 0 4 8 12 16 20 24 28 3 7 11 15 19 23 27 2 6 10 14 18 22 26 1 5 9 13 17 21 25
5 0 5 10 15 20 25 1 6 11 16 21 26 2 7 12 17 22 27 3 8 13 18 23 28 4 9 14 19 24
6 0 6 12 18 24 1 7 13 19 25 2 8 14 20 26 3 9 15 21 27 4 10 16 22 28 5 11 17 23
7 0 7 14 21 28 6 13 20 27 5 12 19 26 4 11 18 25 3 10 17 24 2 9 16 23 1 8 15 22
8 0 8 16 24 3 11 19 27 6 14 22 1 9 17 25 4 12 20 28 7 15 23 2 10 18 26 5 13 21
9 0 9 18 27 7 16 25 5 14 23 3 12 21 1 10 19 28 8 17 26 6 15 24 4 13 22 2 11 20
10 0 10 20 1 11 21 2 12 22 3 13 23 4 14 24 5 15 25 6 16 26 7 17 27 8 18 28 9 19
11 0 11 22 4 15 26 8 19 1 12 23 5 16 27 9 20 2 13 24 6 17 28 10 21 3 14 25 7 18
12 0 12 24 5 19 2 14 26 9 21 4 16 28 11 23 6 18 1 13 25 8 20 3 15 27 10 22 5 17
13 0 13 26 10 23 7 20 4 17 1 14 27 11 24 8 21 5 18 2 15 28 12 25 9 22 6 19 3 16
14 0 14 28 13 27 12 26 11 25 10 24 9 23 8 22 7 21 6 20 5 19 4 18 3 17 2 16 1 15
15 0 15 1 16 2 17 3 18 4 19 5 20 6 21 7 22 8 23 9 24 10 25 11 26 12 27 13 28 14
16 0 16 3 19 6 22 9 25 12 28 15 2 18 5 21 8 24 11 27 14 1 17 4 20 7 23 10 26 13
17 0 17 5 22 10 27 15 3 20 8 25 13 1 18 6 23 11 28 16 4 21 9 26 14 2 19 7 24 12
18 0 18 7 25 14 3 21 10 28 17 6 24 13 2 20 9 27 16 5 23 12 1 19 8 26 15 4 22 11
19 0 19 9 28 18 8 27 17 7 26 16 6 25 15 5 24 14 4 23 13 3 22 12 2 21 11 1 20 10
20 0 20 11 2 22 13 4 24 15 6 26 17 8 28 19 10 1 21 12 3 23 14 5 25 16 7 27 18 9
21 0 21 13 5 26 18 10 2 23 15 7 28 20 12 4 25 17 9 1 22 14 6 27 19 11 3 24 16 8
22 0 22 15 8 1 23 16 9 2 24 17 10 3 25 18 11 4 26 19 12 5 27 20 13 6 28 21 14 7
23 0 23 17 11 5 28 22 16 10 4 27 21 15 9 3 26 20 14 8 2 25 19 13 7 1 24 18 12 6
24 0 24 19 14 9 4 28 23 18 13 8 3 27 22 17 12 7 2 26 21 16 11 6 1 25 20 15 10 5
25 0 25 21 17 13 9 5 1 26 22 18 14 10 6 2 27 23 19 15 11 7 3 28 24 20 16 12 8 4
26 0 26 23 20 17 14 11 8 5 2 28 25 22 19 16 13 10 7 4 1 27 24 21 18 15 12 9 6 3
27 0 27 25 23 21 19 17 15 13 11 9 7 5 3 1 28 26 24 22 20 18 16 14 12 10 8 6 4 2
28 0 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
TABLE 2. Each element of prime sequence is mapped into binary codewords
0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 2 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 3 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 4 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 5 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 6 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 7 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 8 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 9 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 11 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 12 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 13 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 14 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 15 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 16 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 17 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 18 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 19 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 20 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 21 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 22 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 23 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 24 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 25 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 26 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 27 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 28 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1
의 모든 코드워드는 항상 ‘1’로 시작하여, DS-OCDMA 기술 로 부호화한 레이저 펄스의 반사파를 수신했을 때, 반사파의 수신이 시작되었음을 알 수 있다.
대역 확산된 데이터는 RZ-OOK로 디지털 변조가 된 후, 광변조기를 이용하여 320 GHz의 속도로 레이저 펄스를 생 성하여 방출한다. 하나의 측정 방향으로 방출하는 레이저 펄 스는 13비트 스트림을 소수 29를 사용하는 1차원 단극성 비 동기식 프라임 시퀀스 코드로 대역 확산하여 10933개의 마 이크로펄스로 구성되어 있다. 각각의 마이크로펄스는 파장이 905 nm이고, 가우시안 형태의 에너지 분포 형태를 지니며, 펄스 지름이 1 mm, 듀티비(Duty Ratio)가 50%이고, 펄스폭 이 3.125 ps인 레이저 빔으로 구성되고, MPE 1급을 준수하 는 전력으로 방출된다. 레이저 빔을 방출할 때 시간과 행 식 별 번호를 열 식별 번호와 함께 저장하여, 반사파를 수신하 였을 때 비행시간을 계산할 때 사용한다.
기존의 3D 스캐닝 라이다는 하나의 거울로 레이저 송신과 수신을 처리하는 동축(Coaxial)으로 설계되어, 레이저를 방출 한 후 최대 측정 거리에 따라 반사파를 수신하기 위하여 거 울을 고정하고 있어야 한다. 제안하는 라이다는 레이저 펄스 를 원하는 방향으로 반사하기 위하여 모터가 장착된 거울이 아니라 2축 자유도를 가진 MEMS 거울을 이용한다. 송신부 와 수신부가 분리되어 상호 독립으로 동작하여 레이저 펄스 를 송신할 때만 MEMS 거울을 사용하고, 수신할 때는 사용 하지 않는다. 평행 빔을 송신할 때만 MEMS 거울을 사용하
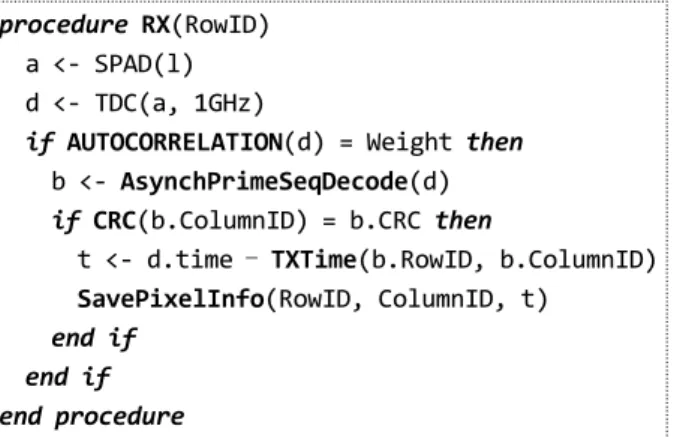
d <- TDC(a, 1GHz)
if AUTOCORRELATION(d) = Weight then b <- AsynchPrimeSeqDecode(d) if CRC(b.ColumnID) = b.CRC then
t <- d.time – TXTime(b.RowID, b.ColumnID) SavePixelInfo(RowID, ColumnID, t)
end if end if end procedure
FIG. 6. The reception procedure in the RX part.
mm 크기의 거울 장착하고, 가로 시야각(Horizontal Field-of-View, HFoV)은 43.2°이고 세로 시야각(Vertical Field-of-View, VFoV) 은 24.3°이다. 가로 시야각은 848단계로 각도 조절이 가능하 여 한 번에 0.0509° 씩 각도 조절이 되고, 세로 시야각은 480 단계로 각도 조절이 가능하여 한 번에 0.0506°씩 각도 조절 이 된다. 마이크로비전의 MEMS 거울을 이용하면 848×480 해상도의 거리 영상을 1초에 60번 측정할 수 있고, 1개 거울 이 픽셀에 머무는 시간은 대략 40 ns이다. 레이저 펄스를 MEMS 거울로 반사하여 원하는 방향으로 보내기 위해서는 레이저 펄스의 방출이 40 ns 내에 완료되어야 한다. 광변조 기에서 지름이 1 mm이고 폭이 3.125 ps인 레이저 펄스를 생 성하여 방출할 경우, 10933개의 칩으로 이루어진 하나의 레 이저 펄스를 반사하기 위해서는 36.165 ns의 시간이 필요하 여 마이크로비전의 MEMS 거울을 사용하기 충분하다. Figure 5의 알고리즘에서 기술하였듯이 측정 방향에 따라 행과 열 식별 번호가 결정되면, 그 번호에 따라 MEMS 거울의 가로 와 세로 각도를 조절하고, DS-OCDMA 기술로 대역 확산된 레이저 펄스를 방출하여 원하는 측정 방향으로 반사시켜 보 낸다.[18]
2.3. 수신부
Figure 6에 기술한 알고리즘 형태에 따라 수신부에서 각 단계를 처리한다. 수신부에 장착된 렌즈를 통해 수신된 반사 파를 SPAD(Single-Photon Avalanche Diode)를 이용하여 아 날로그 전기 신호로 변환한다. 256채널의 300 Msps로 동작 하는 비동기식 파이프라인 구조(Asynchronous Pipeline)의 TDC를 이용하여 펄스를 검출하고 펄스 폭과 도착 시간을 측정한다. TDC의 START에는 1 GHz로 동작하는 PLL에서 생성되는 펄스를 입력하고, STOP 신호에는 SPAD의 아날로 그 전기 신호를 입력한다. TDC에서 출력된 시간 정보를 이 용하여 펄스가 수신된 시간을 계산한다. DS-OCDMA로 방출 한 레이저 펄스는 첫 신호가 항상 ‘1’로 되어있으므로, ‘1’로 판단할 수 있는 전압이 수신되면 RZ-OOK 복조를 이용하여 320GHz 속도로 디지털 데이터를 10933개의 칩 데이터로 변 환한다. 변환이 완료된 칩 데이터는 식 (5)에서 나타낸 자기 상관함수(Autocorrelation Function)와 교차상관함수(Crosscorrelation Function)을 이용하여 대역 확산된 데이터를 검출한다. 식 (5)에서 ∈일 때 는 칩 데이터로 만든 시퀀 스 코드이고, 는 방출할 레이저를 부호화할 때 사용한 시 퀀스 코드이다. 검출된 데이터는 동기식 프라임 시퀀스 코드 방식으로 복호화하는 대역 역확산(Despreading Spectrum)과 정을 거쳐서 13비트 스트림으로 변환한다.[19-21]
⋅ Autocorrelation
≠ Crosscorrelation (5)
복호화된 13비트 스트림에 있는 10비트 열 식별 번호를 3 비트 CRC 알고리즘을 이용하여 CRC 체크섬을 생성하고, 이 를 13비트 스트림에 포함된 CRC 체크섬과 비교한다. 두 개 의 CRC 체크섬이 일치하지 않으면 오류가 있으므로 폐기를 하고, 일치할 경우 다음 과정으로 진행한다. 13비트 스트림 에 있는 열 식별 번호를 이용하여 해당 펄스가 방출된 시간 과 행 번호를 알아내고, 펄스의 최대값이 수신된 시간을 더 하여 비행시간과 물체까지 거리를 계산한다. 행과 열 식별 번호와 함께 물체까지 거리를 기록하고, 펄스의 최대값은 수 신 신호 세기로 기록한다. 848×480 해상도에 해당하는 모든 방향에 대하여 Fig. 6에 기술된 과정을 거치면 하나의 포인 트 클라우드(Point Cloud) 영상이 완성된다.[22]
III. 시뮬레이션
제안한 라이다의 동작 성능을 비교하고 검증하기 위하여 시뮬레이션을 수행하였다. 결과를 비교할 대상으로 3D 스캐 닝 라이다 중에서 가장 많이 사용되는 벨로다인의 HDL-64E, 플래시 라이다 중에서 가장 많이 사용되는 ASC의 페러그린 을 선택하였다. 제안한 라이다가 DS-OCDMA를 이용하여 레 이저 펄스를 방출하고, 반사파를 수신 한 후 처리하는 과정 을 시뮬레이션으로 구현하였다. 비교 대상으로 선택한 3D 스캐닝 라이다와 플래시 라이다도 레이저를 방출하고, 반사 파를 수신하여 처리하는 과정을 Fig. 7과 같이 동작하는 시 뮬레이션으로 구현하였다.[23] 시뮬레이션으로 라이다의 성능 을 비교하기 위한 파라메타는 Table 3과 같다.
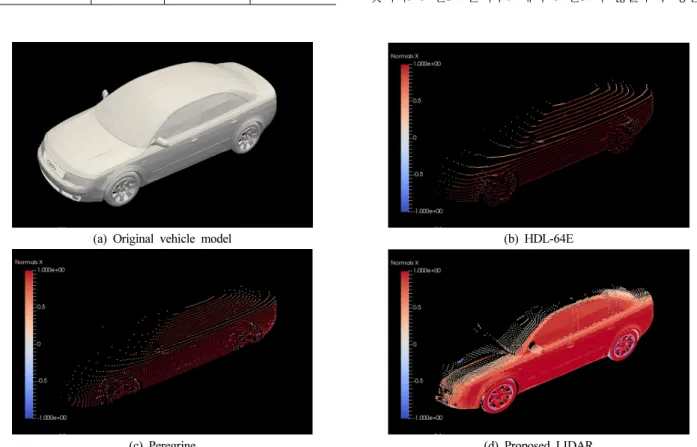
길이가 4.7 m, 높이가 1.42 m, 폭이 1.82 m인 3D 자동차 모델을 세 가지 라이다의 전방 30 m, 50 m, 70 m, 120 m 떨 어진 곳에 두고 시뮬레이션으로 포인트 클라우드와 그에 따 른 3D 거리 영상을 생성하여 비교하였다.
Figure 8에서 나타나듯이 전방 30 m에 3D 자동차 모델을 두고 시뮬레이션했을 때는 세 가지 라이다의 거리 영상 결과 에서 측정하는 물체의 형상이 매우 뚜렷이 나타나서 자동차 에 대한 거리 영상임을 확실하게 인지할 수 있다. 페러그린
FIG. 7. Flow chart of simulation steps for a static scenario.
TABLE 3. Simulation parameters of thee LIDARs Velodyne
HDL-64E
ASC Peregrine
Proposed LIDAR Laser emission Scanning Flash Scanning Angular resolution 0.08° 0.234375° 0.0509°
Layers 64 32 480
Maximum range 120 m 70 m 150 m
HFoV 360° 30° 43.2°
VFoV 26.8° 7.5° 24.3°
Refresh rate 5 Hz 30 Hz 60 Hz
Resolution 4500×64 128×32 848×480
(a) Original vehicle model (b) HDL-64E
(c) Peregrine (d) Proposed LIDAR
FIG. 8. The simulation results of distance measured by each LIDAR is located at 30 m in front.
으로 측정한 거리 영상은 VFoV의 작아서 타이어의 일부가 보이지 않는다.
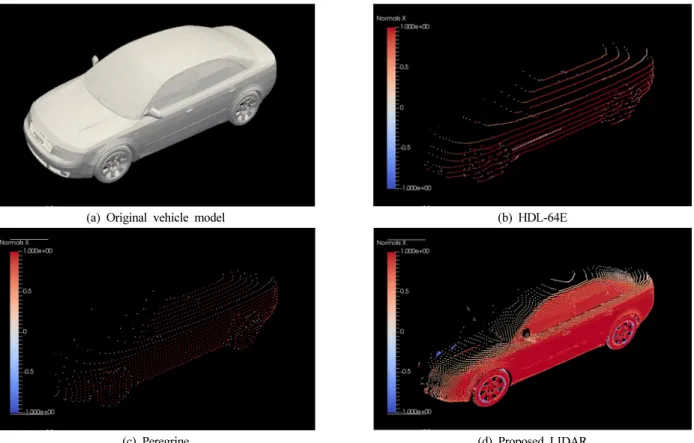
Figure 9는 전방 50 m에 3D 자동차 모델을 두고 시뮬레이 션한 세 가지 라이다의 거리 영상 결과이다. 30 m보다 영상 의 정밀도는 떨어지지만 측정하는 물체의 형상이 나타나서 자 동차에 대한 거리 영상임을 확실하게 인지할 수 있다. 30 m 거리에서 VFoV가 작아서 일부가 보이지 않았던 ASC 페러 그린도 자동차의 모든 부분이 잘 보인다. 라이다와 자동차 사이의 거리가 멀어짐에 따라 각도 해상도가 낮아져서 측정 지점의 간격이 커지고 있다.
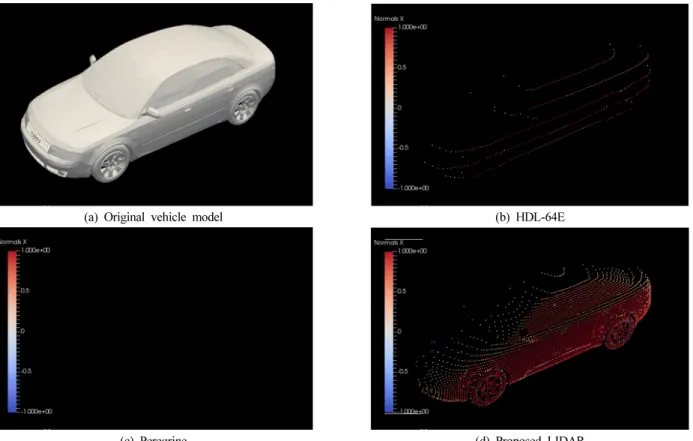
Figure 10은 전방 70 m에 3D 자동차 모델을 두고 시뮬레 이션한 세 가지 라이다의 거리 영상 결과이다. 50 m보다 영 상의 정밀도가 많이 떨어져서 측정하는 물체의 형상이 엉성 하게 보인다. HDL-64E의 경우 자동차에 대한 거리 영상임 을 파악하기 쉽지 않다. 라이다와 자동차 사이의 거리가 멀 어짐에 따라 각도 해상도가 더욱 낮아져서 측정 지점의 간격 이 50 m보다 더 커졌다.
Figure 11은 전방 120 m에 3D 자동차 모델을 두고 시뮬레 이션을 수행한 세 가지 라이다의 거리 영상 결과이다. 70 m 보다 영상의 정밀도가 더욱 많이 떨어져서 제안하는 라이다 를 제외하면 측정하는 물체의 형상을 쉽게 파악하기 힘들다.
페러그린의 경우 최대 측정 거리인 70 m를 초과하여 결과물 이 나오지 않았다.
Table 4는 3D 자동차 모델까지 거리에 따라 각각의 라이 다에서 측정하여 생성된 포인트 클라우드의 개수를 비교한 것이다. 포인트 클라우드에서 포인트가 많을수록 정밀하게
(a) Original vehicle model (b) HDL-64E
(c) Peregrine (d) Proposed LIDAR
FIG. 9. The simulation results of distance measured by each LIDAR is located at 50 m in front.
(a) Original vehicle model (b) HDL-64E
(c) Peregrine (d) Proposed LIDAR
FIG. 10. The simulation results of distance measured by each LIDAR is located at 70 m in front.
(a) Original vehicle model (b) HDL-64E
(c) Peregrine (d) Proposed LIDAR
FIG. 11. The simulation results of distance measured by each LIDAR is located at 120 m in front.
TABLE 4. The number of points in point cloud is a summary of simulation results
Velodyne
HDL-64E ASC Peregrine Proposed LIDAR
30 m 6160 3131 81312
50 m 2170 1282 28646
70 m 1134 650 14479
120 m 376 0 4845
측정했음을 나타낸다. 제안하는 라이다는 HDL-64E보다 10 배 이상 많은 측정 포인트를 생성하였고, 페러그린보다 20배 이상 많은 측정 포인트를 생성하였다.
IV. 결 론
본 논문에서 측정 방향을 대기 시간없이 하나씩 순차적으 로 거리 측정하는 3D 스캐닝 라이다를 제안하고, 시뮬레이 션을 이용하여 기존 라이다와 성능을 비교하였다. 기존의 3D 스캐닝 라이다와 플래시 라이다는 레이저 펄스를 방출하 고 일정시간 대기하여 반사파를 수신해야 한다. 이들 라이다 들이 반사파 수신을 위하여 대기하는 시간은 라이다에서 측 정하는 거리가 멀어짐에 따라 비례하여 증가한다. 또한 동시 에 동작하는 라이다가 많을 경우 다른 라이다의 레이저 펄스 가 수신되어 주변 환경 인지에 오류가 발생할 수 있다.
제안하는 라이다는 장치 식별 번호와 측정 방향에 해당하 는 열 식별 번호를 조합한 데이터에 DS-OCDMA 방식을 적 용하여 생성한 매크로펄스 형태의 레이저 펄스를 각각의 측 정 방향으로 방출한다. 장치 식별 번호를 이용하면 수신한 반사파 중에서 자신이 방출한 레이저 펄스에 대한 반사파만 걸러서 처리한다. 열 식별 번호를 이용하면 수신한 반사파의 방출 시간과 행 번호를 알 수 있으므로, 레이저를 방출한 후 반사파를 수신하기 위해 대기할 필요가 없다. 모터가 장착된 거울대신 고속으로 동작하는 MEMS 거울을 사용하여 원하 는 측정 방향으로 레이저 펄스를 반사하여 전송한다. 이러한 특성으로 848×480 해상도의 거리 영상을 1초에 60번까지 측 정가능하다.
자율 주행 자동차나 자율 보행 로봇은 3D 스캐닝 라이다 를 이용하여 주변의 환경을 인지하고, 이동 가능한 공간을 파악한다. 거리 영상의 해상도와 재생률이 높을수록 주변 환 경을 실제에 가깝게 인지할 수 있다. 제안하는 라이다는 이 들에게 전방의 환경을 인지하기 좋은 거리 영상을 제공할 수 있음을 시뮬레이션으로 확인하였고, 다양한 환경에서 실험을 통하여 동작 검증이 필요하다. MEMS 거울을 사용하여 레이 저 펄스를 반사한 후 전송하여 라이다의 전방에 있는 거리 영상만 생성한다는 한계가 있다. 자율 주행을 위해서는 주변 의 모든 영영에 대한 거리 영상이 필요하므로 라이다를 중심 으로 주변 360°에 대하여 거리 측정할 수 있도록 개선되어야 할 것이다.
양성사업의 지원(NRF-2013H1B8A2031879)과 2014년도 정 부(미래창조과학부)의 재원으로 한국연구재단의 지원(No. NRF- 2014R1A1A2055988)을 받아 수행된 연구임.
References
1. H. Choi and B. Song, “Path Planning for Static Obstacle Avoidance: ADAM III,” Transactions of KSAE 22, 241-249 (2014).
2. S. Kwon, H. Jo, J. Yoon, H. Lee, J. Lee, S. Kwak and H. Choi, “Pattern Recognition using 2D Laser Scanner Shaking,” Transactions of KSAE 22, 138-144 (2014).
3. M. Kang, S. Hur, I. Park and Y. Park, “Map Building Based on Sensor Fusion for Autonomous Vehicle,” Transactions of KSAE 22, 14-22 (2014).
4. P. F. McManamon, Field Guide to LIDAR (SPIE Press, Bellingham, 2015).
5. P. F. McManamon, “Review of LADAR: A Historic, Yet Emerging, Sensor Technology with Rich Phenomenology,”
Opt. Eng. 51, 060901 (2012).
6. J. Hancock, Ph. D. Thesis, Carnegie Mellon University, Pittsburgh (1999).
7. R. D. Richmond and S. C. Cain, Direct-detection LADAR Systems (SPIE Press, Bellingham, 2010).
8. Z. Zhang, Y. Zhao, Y. Zhang, L. Wu and J. Su, “A Real-time Noise Filtering Strategy for Photon Counting 3D Imaging Lidar,” Opt. Express 21, 9247-9254 (2013).
9. S. A. GuOmundsson, H. Aanæs and R. Larsen, “Environmental Effects on Measurement Uncertainties of Time-of-Flight Cameras,” in Proc. Signals, Circuits and Systems (Iasi, Romania, Jul. 2007), pp.1-4.
10. F. Remondino and D. Stoppa, TOF Range-imaging Cameras (Springer, Heidelberg, 2013).
11. J. Ho and E.-H. Yang, “Designing Optimal Multiresolution Quantizers with Error Detecting Codes,” IEEE Trans. Wireless Commun. 12, 3588-3599 (2013).
12. P. Koopman and T. Chakravarty, “Cyclic Redundancy Code
13. D. R. Reilly and G. S. Kanter, “High Speed Lidar via GHz Gated Photon Detector and Locked but Unequal Optical Pulse Rates,” Opt. Express 22, 15718-15723 (2014).
14. C. Goursaud-Brugeaud, A. Julien-Vergonjanne and J.-P.
Cances, “Prime Code Efficiency in DS–OCDMA Systems using Parallel Interference Cancellation,” Journal of Communications 2,51-57 (2007).
15. F. R. K. Chung, J. A. Salehi and V. K. Wei, “Optical Orthogonal Codes: Design, Analysis and Applications,”
IEEE Trans. Inf. Theory 35, 595-604 (1989).
16. G.-C. Yang and W. C. Kwong, Prime Codes with Appli- cations to CDMA Optical and Wireless Networks (Artech House, Norwood, 2002).
17. W. C. Kwong and G.-C. Yang, Optical Coding Theory with Prime (CRC Press, Boca Raton, 2013).
18. M. Freeman, M. Champion and S. Madhavan, “Scanned Laser Pico–projectors: Seeing the Big Picture (with a Small Device),” Optics and Photonics News 20, 28-34 (2009).
19. S. Choi, J. Shin, S. Kang, J. Hong and Y. Kwon,
“3-Dimensional LADAR Optical Detector Development in Geiger Mode Operation,” Korean J. Opt. Photon. 24, 176-183 (2013).
20. J. Kim, Y. Seo, Y. Suh, H. Park and J. Sim, “A 300-MS/s, 1.76-ps-Resolution, 10-b Asynchronous Pipelined Time-to- Digital Converter With on-Chip Digital Background Calibration in 0.13-µm CMOS,” IEEE J. Solid-State Circuits 48, 516-526 (2013).
21. Z. Cheng, X. Zheng, M. J. Deen and H. Peng, “Recent Developments and Design Challenges of High-Performance Ring Oscillator CMOS Time-to-Digital Converters,” IEEE Trans. Electron Devices 63, 235-251 (2016).
22. J. Shan and C. K. Toth, Topographic Laser Ranging and Scanning: Principles and Processing (CRC Press, Boca Raton, 2008).
23. M. E. O’Brien and D. G. Fouche, “Simulation of 3D laser Radar Systems,” Lincoln Laboratory Journal 15, 37-60 (2005).