나로호 킥모터 TVC 노즐 행정확인시험 및 특성 분석
선병찬*, 박용규**, 오충석***, 노웅래****
Stroke Verification Test and Operational Characteristics Analysis of KSLV-I Kick Motor TVC Nozzle
Byung-Chan Sun*, Yong-Kyu Park**, Choong-Suk Oh***, Woong-Rae Roh****
Abstract
This paper deals with TVC nozzle stroke verification test and corresponding analysis techniques related to kick motor TVC system of KSLV-I second stage. It is shown that the relationship between TVC stroke and potentiometer voltage is revealed via the open-loop stroke verification test, and other major operational parameters including nozzle alignment error, actuation error, neutral position, radius of nozzle rotation, location of nozzle rotation center, angle conversion coefficients, etc. are analyzed via the closed-loop stroke verification test. The TVC stroke verification test results for the first and second flight model of KSLV-I show that all TVC operational parameters of KSLV-I second stage were normally setup for the first and second flight tests.
초 록
본 논문에서는 나로호 2단 킥모터 TVC 노즐에 대한 행정확인시험 방법과 행정확인시험 데이터로부터 TVC 운용 특성을 분석하는 과정 및 결과에 대해 다루었다. 개루프 행정확인 시험을 통해 TVC 스트로크와 포텐셔미터 전압 간의 관계를 분석하고, 폐루프 행정확인시 험을 통해 노즐정렬오차, TVC 구동오차, TVC 중립위치, 플렉스씰 노즐의 회전중심위치, 비행시험후 분석에 사용할 노즐각 환산계수 등을 분석할 수 있음을 보였다. 아울러, 나로 호 1호기 및 2호기 TVC 시스템에 대해 행정확인시험을 수행한 결과 TVC 운용 관련 모든 파라미터가 정상 범위 내에서 설정되었음을 정량적인 수치로써 제시하였다.
키워드 : 나로호(KSLV-I), 플렉스씰 노즐(flexseal nozzle), 추력벡터제어(thrust vector control), 행정확인시험(stroke verification test), 운용 특성(operational characteristics)
접수일(2012년 5월 21일), 수정일(1차 : 2012년 6월 14일, 게재 확정일 : 2012년 7월 1일)
* 체계설계팀/[email protected] ** 체계설계팀 /[email protected]
*** 체계설계팀 /[email protected] **** 체계설계팀 /[email protected]
1. 서 론 나로호(KSLV-I)는 2단형 위성발사체로서 그림
1과 같이 1단은 액체엔진, 2단은 고체모터를 사
용해서 추진력을 발생시킨다. 나로호 2단의 자세 제어시스템은 추력벡터제어(TVC, Thrust Vector Control) 시스템과 냉가스 추력기 시스템으로 구 성된다. 추력벡터제어 시스템으로 킥모터 노즐의 방향을 바꾸어줌으로써 피치 및 요 자세제어를 수행하고 킥모터 연소중의 롤 자세제어 목적으로 는 스킨에 장착된 별도의 질소가스 추력기를 분 사시킨다. 킥모터 점화 전과 연소종료 후의 무추 력구간 3축 자세제어는 질소가스 추력기 시스템 을 이용해서 수행한다.
그림 1. 나로호 구성
나로호 2단의 추력벡터제어 시스템(그림 2 참 조)은 크게 작동유압 생성 및 분배 모듈, 작동기 모듈, 제어기 모듈로 구성된다. 전기-유압식 구동 시스템을 기반으로 하고 있어서 배터리 전원을 이용한 유압펌프 구동을 통해 필요한 유압을 생 성하며 작동기 내 확장 또는 수축 격실로 유입되 는 유량을 서보밸브로 제어하여 피스톤의 행정 운동을 유발시킨다. 작동기 모듈은 작동기 2조와 카운터 포텐셔미터(Counter Potentiometer) 2조로 구성되는데, 작동기는 피스톤의 운동변위 측정을 목적으로 피스톤 내부에 포텐셔미터가 내장되어 있다. TVC 제어기에는 작동기 정밀제어를 위한
알고리듬이 탑재되어 있어서 관성항법장치에서 보내온 자세제어 명령대로 킥모터 노즐의 회전각 을 제어할 목적으로 서보밸브 개폐명령을 생성한다.
TVC 시스템에 대한 성능시험은 시제품부터 비행용 제품까지 단계적으로 수행된다. 시제품 시험을 통해 TVC 시스템의 개략적인 특성 파악 및 개선방안에 대한 검토가 이루어지고 엔지니어 링 모델 시험을 통해 성능 확인 및 비행적합성 검증 절차 수립이 이루어지며 비행용과 동일한 인증모델 시험을 통해 비행성능 적합성 및 시험 절차 검증이 완료된다. 비행용 TVC 시스템의 경 우에는 활성연료 킥모터에 의한 안전 문제로 인 해 발사장에서 조립되므로 발사장에서의 TVC 시스템 장착 직후 수행되는 행정확인시험을 통해 비행적합성을 최종 확인한다.
그림 2. 나로호 2단부 TVC 시스템 구성도
킥모터에 TVC 작동기가 장착되고 TVC 극성
확인이 완료되면 비행시 킥모터 연소중의 추력비
정렬오차를 최소화하기 위한 목적으로 노즐정렬
작업이 수행된다. 탑재 TVC 제어기 내의 카운터
포텐셔미터 궤환이득과 오프셋을 조절함으로써
기체축과 노즐의 각도를 최대한 정확히 맞추게 된다. 행정확인시험을 통해 노즐정렬오차를 분석 하는데, 이러한 과정에서 작동기와 카운터 포텐 셔미터의 중립상태, 스트로크 비례계수 등도 함 께 분석된다. 비행시험시 지상으로 전송되는 텔 레메트리 데이터 기준으로 TVC 노즐각을 환산 할 수 있는 계수를 비롯해서 작동기 및 카운터 포텐셔미터의 스트로크를 계산할 수 있는 계수 등도 행정확인시험 데이터로부터 얻어진다. 이러 한 분석을 통해 TVC 시스템의 비행성능 적합성 을 판단하고 비행후 분석이 가능해지므로 필수적 인 과정의 하나임에 틀림없다.
이에, 본 논문에서는 나로호 2단부 TVC 노즐 정렬 직후의 행정확인시험 방법과 행정확인시험 데이터로부터 주요 운용 특성을 분석하는 방법에 대해 소개하고 아울러 비행용 TVC 시스템 적용 결과를 정리하고자 한다.
2. 나로호 킥모터 TVC 노즐 행정확인시험
2.1 행정확인시험
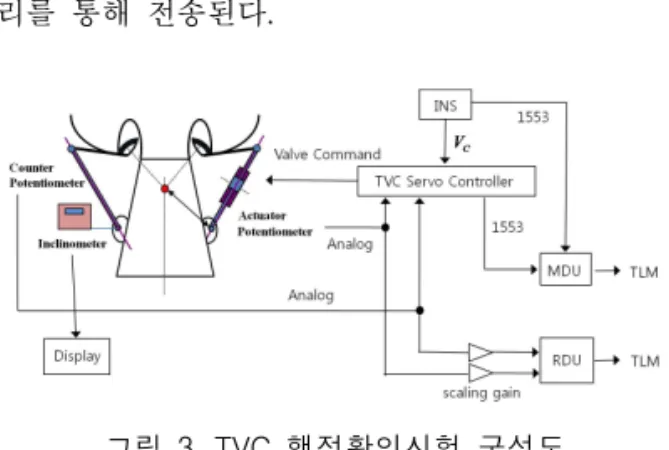
TVC 노즐 행정확인시험은 포텐셔미터 신호의 TVC 서보제어기 궤환유무에 따라 개루프 시험 과 폐루프시험으로 나뉜다. 먼저, 폐루프 행정확 인시험을 위한 시험 구성도를 설명하면 그림 3과 같다. 가급적 비행시의 인터페이스 환경과 동일 하게 만들기 위해 관성항법장치(INS, Inertial Navigation System)에서 TVC 명령을 생성해서 TVC 서보제어기로 전달하며, TVC 서보제어기에 서는 작동기 구동을 위한 밸브제어 명령을 생성 한다. 작동기 포텐셔미터와 카운터 포텐셔미터에 서 측정된 아날로그 신호는 TVC 서보제어기로 궤환되어 제어루프의 입력으로 사용된다. 서보제 어기로 궤환된 포텐셔미터 신호는 MIL-STD- 1553B 형태의 디지털 신호로 변환되어 텔레메 트리를 통해 전송된다. TVC 서보제어기로 궤환 되는 포텐셔미터 아날로그 신호는 그 자체로 RDU(Remote Data Unit)를 거치거나 MIL-STD- 1553B 형태의 디지털 신호로 변환되어 텔레메트
리를 통해 전송된다.
그림 3. TVC 행정확인시험 구성도 INS: Inertial Navigation System, MDU: Master Data Unit RDU: Remote Data Unit, TLM: Telemetry
TVC 노즐의 각도는 카운터 포텐셔미터 브라 켓에 장착된 경사도계(Inclinometer)를 이용해서 측정된다. 경사도계의 경우 실제 비행 중에 장착 되지 않는 품목이므로 별도의 지상장비에서 계측 된다. 나로호의 경우 정확한 정렬을 위해 10
-3도 의 분해능을 가지는 경사도계를 적용하였다.
행정확인시험은 TVC 구동성능 전 범위에 걸 쳐서 수행되어야 한다. 나로호 2단 TVC의 경우
±10V 명령으로 노즐이 ±3도 구동되도록 구성된 다. 응답특성이 느린 경사도계를 이용해서 노즐 각을 정확히 측정하기 위해서 TVC 명령을 일정 하게 유지하는 구간이 포함된 계단식 형태로 시 험신호를 그림 4와 같은 형태로 구성해야 하는 데, 분석에 충분할 만큼의 최소한의 개수로 구간 을 나누어야 한다.
그림 4. 행정확인시험용 TVC 명령
나로호 비행용 TVC 시스템 행정확인시험에서 는 -10V 명령을 시작으로 2V 간격으로 +10V 까 지 증가시키는 방식으로 명령 신호를 구성하였으 며 이후 +10V부터 2V 간격으로 -10V까지 다시 낮추는 방식을 취하였다. 명령 신호를 증가시킨 후 다시 감소시킴으로써 사이클을 형성하는 것은 0V 부근에서의 히스테레시스 특성을 파악하기 위함이다. 추가로, -2V~+2V 범위에서는 1V 간 격으로 촘촘하게 구성해서 0V 부근에서 정렬오 차 및 히스테레시스 특성을 보다 정확히 분석할 수 있도록 하였다. 명령 간의 이동은 급격한 변 동에 의한 과응답 특성이 나타나지 않도록 선형 적으로 서서히 변경시키게 되며, 피치축과 요축 에 대해 독립적으로 시험을 수행하였다. 데이터 계측은 TVC 명령전압 2채널, 포텐셔미터 전압 4 채널, 경사도계 측정전압 2채널에 대해 이루어지 는데 비행데이터 처리를 목적으로 텔레메트리 라 인을 통해 측정된 전압을 계측하였다.
개루프시험은 포텐셔미터 측정전압과 작동기 및 카운터 포텐셔미터 스트로크와의 관계를 분석 하기 위한 시험으로서 그림 5와 같이 위치정밀측 정장비에 작동기 및 카운터 포텐셔미터를 장착한 상태에서 수행된다. 따라서 개루프 행정확인시험 은 TVC 단품 개발 과정에서 미리 수행되어야만 한다. 시험에 적용되는 신호는 폐루프 행정확인 시험의 경우와 동일한 형태를 가지게 되지만 구 간을 더 정밀하게 나누어 특성을 관찰한다.
그림 5. TVC 개루프 행정확인시험
2.2 나로호 비행모델 행정확인시험 결과 나로호 비행시험 모델에 대한 피치축 TVC 노 즐 행정확인시험 결과를 그림으로 정리하면 그림 6~9와 같다. 요축 또한 동일한 형태로 얻어졌다.
그림 6~7은 개루프 행정확인시험에서 측정된 작 동기 및 카운터 포텐셔미터 스트로크와 측정 전 압 간의 관계를 보여주는데 선형적인 특성이 잘 드러난다. 그림 8~9는 폐루프 행정확인시험 결과 를 나타내는데, 그림 8은 TVC 명령과 노즐각 측 정치와의 관계를 보여주고, 그림 9는 TVC 명령 과 작동기 및 카운터 포텐셔미터 측정 전압을 보 여준다. TVC 명령이 증가함에 따라 작동기 스트 로크는 선형적으로 증가하고 카운터 포텐셔미터 는 선형적으로 감소하는 형태가 됨을 확인할 수 있다. 카운터 포텐셔미터가 작동기 위치 기준으 로 180도 반대편에 장착되므로 작동기 스트로크 가 증가할 때 카운터 포텐셔미터의 스트로크는 감소하게 된다.
그림 6. TVC 개루프 행정확인시험 결과 (1)
그림 7. TVC 개루프 행정확인시험 결과 (2)
그림 8. TVC 폐루프 행정확인시험 결과 (1)
그림 9. TVC 폐루프 행정확인시험 결과 (2)
3. 나로호 킥모터 TVC 노즐 운용 특성 분석
3.1 TVC 노즐 정렬오차 분석
폐루프 행정확인시험 데이터로부터 TVC 노즐 정렬오차를 분석할 수가 있다. 폐루프 행정확인 시험에서 측정된 노즐각 데이터에서 이상적인 각 도 성분(
)을 빼면 모든 명령구간에서 의 노즐각 구동 오차를 계산할 수가 있으며, 0V 명령에서의 노즐각 오차만 살펴보면 그 자체로써 정렬오차가 된다. 여기서, 이상적인 각도 성분은
±10V의 명령이 주어졌을때 노즐이 ±3도로 정확 히 구동되는 경우에 해당한다.
그림 10~11은 나로호 발사 1호기의 2단 TVC 노즐 구동 오차를 나타낸 것인데, 0V 에서의 정 렬오차가 0.003도 이내임을 알 수가 있으며, 작동 기 팽창행정보다는 수축행정일때 즉, TVC 명령 이 (-)일때 구동 오차가 상대적으로 커지는 경향 이 있음을 확인할 수 있다. 하지만 전 구간에서 의 구동오차가 최대 0.038도 이내로서 충분한 정 밀도를 가지고 있다.
나로호 발사 1호기 및 2호기의 2단 비행용 TVC 노즐에 대한 정렬오차 분석 결과를 비교해 서 정리하면 표 1과 같다. 모든 경우에 최대 0.007도 이내의 오차로써 정렬이 완료되었음을 확인할 수 있다.
그림 10. 나로호 발사 1호기 피치 TVC 노즐 구동 오차
그림 11. 나로호 발사 1호기 요TVC 노즐 구동 오차
구 분 발사 1호기 발사 2호기
피치축 요축 피치축 요축
[mm/V] 1.4448 1.4387 1.4407 1.4517
[mm] 0.3768 0.2765 0.0605 -0.0622
[mm/V] 1.6149 1.6001 1.6129 1.6055
[mm] 0.9121 -1.1817 -0.3762 -0.2508 표 2. 나로호 킥모터 TVC 스트로크 환산계수 분석 결과
모델 구분 피치 TVC
(deg) 요 TVC (deg) 발사 1호기 +0.003 +0.0006 발사 2호기 +0.0067 +0.0048 표 1. 나로호 킥모터 TVC 노즐 정렬오차 분석 결과
3.2 TVC 스트로크와 포텐셔미터 전압 관계 분석
개루프 행정확인시험 데이터에 최소자승법을 적용해서 작동기 및 카운터 포텐셔미터 스트로크 와 측정 전압 간의 관계식을 1차 함수 형태로 구 할 수가 있다.
(1)
(2)
여기서,
,
는 작동기 및 카운터 포텐 셔미터의 스트로크 변동량이고
,
는 작동 기 포텐셔미터 및 카운터 포텐셔미터의 측정 전 압이다.
,
는 스트로크 환산용 비례계수이고
,
는 오프셋에 해당한다.
나로호 발사 1호기 및 2호기의 2단 비행용 TVC 노즐에 대한 스트로크 환산계수 분석 결과 를 정리하면 표 2와 같다. 비례계수와 오프셋은 개발품 간의 차이에 기인해서 조금씩 다른 값으 로 나타나게 되는데 나로호 비행모델의 경우,
은 1.44~1.45 mm/V 범위의 값을 가지는 것으
로 나타났고
는 1.60~1.615 mm/V 범위의 값 을 가지는 것으로 나타나 발사 1, 2 호기 간에 유사성이 있음을 알 수 있다.
킥모터 연소시험 및 비행시험에서의 포텐셔미 터 계측 데이터에 본 관계식을 적용하면 노즐 및 작동기의 스트로크를 분석할 수가 있으며 작동기 및 카운터 포텐셔미터 간의 스트로크 차이를 이 용해서 노즐각 계산 또한 가능하다. TVC 스트로 크 환산계수를 이용한 작동기 및 카운터 포텐셔 미터 총길이 환산식은 다음과 같다.
는 작동기 및 카운터 포텐셔미터의 설계중립길이로서 370 mm이다.
(3)
(4)
그림 12는 그림 9의 포텐셔미터 측정 전압에 스트로크 환산식을 적용해서 구한 작동기 및 카 운터 포텐셔미터의 명령전압에 따른 길이 변동 특성을 보여주고 있는데, 여기서도 선형적인 특 성을 쉽게 확인할 수가 있다.
중립길이
그림 12. 나로호 킥모터 TVC 스트로크 환산 결과
3.3 TVC 중립위치 분석
앞의 스트로크 관계식을 이용하면 TVC 노즐
에 대한 정렬이 완료된 상태에서의 작동기 및 카
운터 포텐셔미터의 중립 길이를 바로 분석할 수
가 있다. 중립길이는 0V 명령 기준의 작동기 및
카운터 포텐셔미터 길이(그림 12 참조)에 해당한 다. 모델상의 중립길이와 정렬 완료 상태에서의 실제 중립 길이를 비교함으로써 정렬 과정에 대 한 간접적인 검증을 수행할 수가 있으며 비행적 합성을 판단하는 단서를 제공하기도 한다.
나로호 2단 비행용 TVC 작동기 및 카운터 포 텐셔미터의 중립위치 분석 결과를 정리하면 표 3 과 같다. 모델상의 중립길이 설계치(370 mm) 기준으로 최대 1.1 mm 의 오차 범위 내에서 노 즐 정렬이 이루어졌음을 알 수가 있는 바, 이는 2단 시스템의 제작 및 조립에 문제가 없었음을 간접적으로 확인할 수 있는 대목이 된다.
모델 구분 피치작동기(mm) 요작동기
(mm) 피치 CP (mm) 요 CP
(mm) 발사1호기 369.0664 369.8123 370.2439 368.8817 발사2호기 369.8939 369.5970 369.3166 369.3307 표 3. 나로호 킥모터 TVC 구동기 중립위치 분석
결과
3.4 플렉스씰 노즐 회전반경 분석
나로호 2단부와 같이 주엔진이 고체모터인 경 우 추력벡터제어를 구현하기 위해서는 노즐의 목 부분을 플렉스씰로 제작해야 하는데, 플렉스씰의 특성상 연소압력에 따라 노즐의 회전중심위치가 변하고 회전반경 또한 설계치와 달라질 수가 있 다. 이에, 노즐 정렬 상태에서의 행정확인시험 데 이터로부터 플렉스씰 노즐의 회전반경을 분석해 서 설계치와 얼마나 차이나는지 확인할 필요가 있다.
플렉스씰 노즐의 회전반경은 원호와 중심각 간의 관계식으로부터 계산된다. 노즐의 회전반경
을
이라 두면 노즐각 변동량
에 해당
하는 스트로크 변동량
은 다음과 같이 나타 낼 수 있다.
(5)
즉, 플렉스씰 노즐의 회전반경을 작동기 및 카
운터 포텐셔미터 스트로크 변동량과 그에 해당하 는 노즐각 변동량의 함수 형태로 구할 수가 있 다.
(6)
노즐 회전중심과 작동기 및 카운터 포텐셔미터 체결점을 연결하는 직선에 대해 작동기 및 카운 터 포텐셔미터의 구동 방향이 수직이 아닐 경우 이와 같이 계산한 회전반경에는 많은 오차가 포 함될 수가 있다. 하지만 정확히 수직을 이루지는 않더라도 수직에 가까운 각도를 이루며 조립되는 경우에는 계산오차가 그리 크지가 않다. 그리고 오차 수준을 감안하더라도 이와 같이 계산된 결 과를 설계치와 비교하면 제작 및 조립의 적합성 을 간접적으로 살필 수 있는 단서가 제공되므로 충분히 가치 있는 분석이 된다.
그림 13. 작동기 지지점 구조변위 발생 현상
한편, 회전반경 분석시에 작동기 스트로크 데 이터보다는 카운터 포텐셔미터 스트로크 데이터 를 적용하는 것이 바람직하다는 점에 유의할 필 요가 있는데, 이는 능동소자인 작동기 스트로크 데이터에는 지지점 자체의 구조적 변위성분이 포 함되어 있어서(그림 13 참조) 노즐의 순수한 회 전운동 성분 분석시에 오차를 유발하기 때문이 다.
폐루프 행정확인시험으로 노즐의 회전반경을
계산하기 위한 절차를 정리하면 다음과 같다. 먼
저, 작동기 및 카운터 포텐셔미터 측정 전압에
스트로크 환산식을 적용해서 스트로크를 계산한
다. 구해진 스트로크 변동량에 최소자승법을 적
용해서 식(7)~(8)과 같이 스트로크 변동량을 노즐
각에 대한 1차 함수 형태로 나타낸다. 다음 식에 서
,
는 노즐각 변동량을 카운터 포텐셔미터 스트로크 변동량으로 환산하기 위한 비례계수 및 오프셋에 해당하고,
,
는 노즐각 변동량을 작동기 포텐셔미터 스트로크 변동량으로 환산하 기 위한 비례계수 및 오프셋을 의미한다.
(7)
(8)
이때 구해진 비례계수
가 바로 노즐의 회전 반경이 된다.
(9)
나로호 2단 비행용 TVC 노즐의 회전반경 분 석 결과를 정리하면 표 4와 같다. 설계치는 276.57 mm 이다. 앞서 언급한 바와 같이, 작동기 비례계수
로부터 구한 회전반경은 지지점에서 의 변위 영향으로 인해 설계치 대비 23~25 mm 정도 크게 나타남을 알 수가 있다. 반면 수동 소 자인 카운터 포텐셔미터 비례계수
로부터 구 한 회전반경을 살펴보면 1 mm 오차 이내에서 설계치와 일치하고 있으며 이로부터 제작 및 조 립에 문제가 없었음을 확인할 수 있다.
모델 구분 피치작동기(mm) 요작동기
(mm) 피치 CP (mm) 요 CP
(mm) 발사1호기 301.1957 301.0744 277.0874 276.9208 발사2호기 299.8453 301.3428 277.0072 277.4831 표 4. 나로호 킥모터 TVC 노즐 회전반경 분석 결과
3.5 플렉스씰 노즐 회전중심위치 분석 플렉스씰 TVC 노즐의 회전중심 위치는 회전 반경 계산 결과로부터 분석이 가능하다. 그림 14 에서처럼 회전중심이 노즐의 목부분으로 이동하 게 되면 회전반경이 설계치보다 커지게 되고 반
대로 회전중심이 노즐 출구쪽으로 이동하게 되면 회전반경이 설계치보다 감소하는 특성이 나타난다.
그림 14. 플렉스씰 TVC 노즐의 회전중심위치
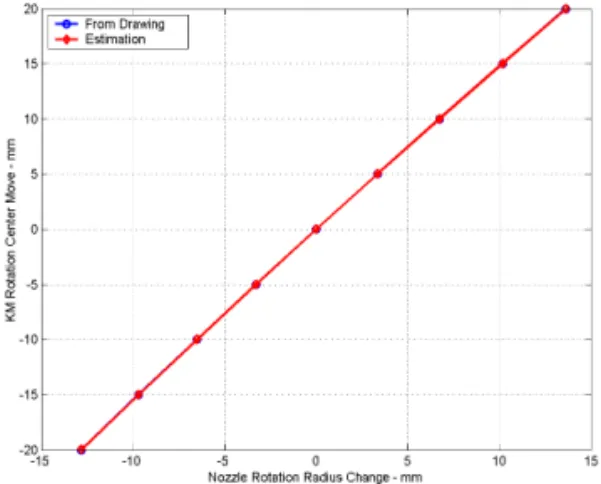
설계치 기준으로 회전중심위치를 조금씩 변동 시켰을 때 예상되는 회전반경 데이터를 모아서 상관관계를 살펴보면 그림 15와 같으며, 이로부 터 회전중심위치 변동량을 회전반경에 대한 2차 함수 형태로 추정할 수가 있다.
(10)
여기서,
는 회전중심의 위치변동량이고 (노즐목 방향 이동시 양수로 정의)
은 모델 상의 설계 회전반경이다.
,
,
는 각각 추정 함수의 2차항, 1차항, 상수항 계수이다. 나로호 2 단부 플렉스씰 노즐의 경우 추정함수의 계수가 다음과 같이 나타난다.
= -0.0035 mm/mm
2
= 1.5141 mm/mm
= -0.0064 mm
그림 15. 나로호 킥모터 노즐의 회전중심위치 추정함수
따라서 위 관계식에 앞에서 분석한 회전반경 성분을 대입하면 회전중심위치의 변동량을 바로 계산할 수가 있으며 이와 같이 분석한 나로호 2 단 킥모터 노즐의 회전중심위치 변동량을 정리하 면 표 5와 같다.
모델 구분 피치 TVC (mm) 요 TVC
(mm) 평균위치 (mm) 발사 1호기 +2.2829 +0.5243 +1.40 발사 2호기 +0.6549 +1.3752 +1.01
표 5. 나로호 킥모터 TVC 노즐 회전중심위치변동 분석 결과
데이터 처리 및 추정오차 등에 의해 피치와 요축 간의 회전중심위치 분석결과에 최대 1.7 mm 의 차이가 있기는 하지만 평균오차 1.4 mm 이내, 최대오차 2.3 mm 이내에서 설계치와 일치 하고 있음을 확인할 수가 있다. 회전반경 추정치 가 설계치와 유사하기 때문에 회전중심위치 또한 설계치에 가깝게 추정될 것으로 쉽게 예상할 수 있지만 정량적으로도 일치하는 것으로 나타나 플 렉스씰 노즐의 제작, 조립 및 셋업과정에 문제가 없었음을 다시 한번 확인할 수가 있다.
3.6 노즐각 환산식 분석
비행시험시 텔레메트리를 통해 지상으로 전송 되는 데이터에 노즐각 데이터가 포함되어 있지 않으므로 포텐셔미터 데이터로부터 간접적으로 분석하는 수밖에 없다. 이를 위해 포텐셔미터 측 정전압으로부터 노즐각을 계산할 수 있는 환산식 을 지상시험을 통해 사전에 분석해 두어야만 한 다.
포텐셔미터 측정전압으로부터 노즐각을 계산 하는 관계식은 2가지가 있을 수 있다. 하나는 식 (11)~(13)과 같이 스트로크로 먼저 환산한 후 회 전반경식을 적용해서 노즐각을 계산하는 방법이 고 또 다른 하나는 식 (14)~(16)과 같이 포텐셔미 터 전압으로부터 직접 노즐각을 계산하는 방법이 다. 식(12),(13)의
,
는 각각 작동기 포텐셔 미터 및 카운터 포텐셔미터 데이터로부터 구해진 노즐 회전반경이고 식(15),(16)의
,
와
,
는 각각 작동기 포텐셔미터 전압 및 카운터 포텐 셔미터 전압을 노즐각 성분으로 환산하기 위한 비례계수와 오프셋을 의미한다.
,
는 각각 작동기 포텐셔미터 데이터 및 카운터 포텐셔미터 데이터로부터 계산된 노즐각 성분이며 두 값의 평균값을 계산하면 최종적인 노즐각
가 얻어 진다.
▷ 첫 번째 방법:
(11)
(12)
(13)
▷ 두 번째 방법:
(14)
(15)
(16)
첫 번째 방법은 연소압에 의한 노즐팽창의 영 향을 직접 고려할 수 있는 장점이 있다. 노즐 팽 창에 의한 작동기 스트로크 증가는 노즐각이 증 가하는 효과로 나타나지만 카운터 포텐셔미터 스 트로크 증가는 노즐각이 감소하는 효과로 나타나 서로 상쇄되기 때문이다. 두 번째 방법에 사용되 는 비례계수와 오프셋은 행정확인시험 데이터에 최소자승법을 적용해서 추정할 수가 있는데, 이 방법에 의하면 노즐 팽창에 의한 노즐각 변동 성 분이 직접 상쇄되는 방식으로 계산된다.
나로호 2단 TVC 시스템의 행정확인시험으로 부터 추정된 환산식 계수는 표 6과 같다. 발사 1, 2호기의 비례계수들이 거의 동일한 값을 가지고 있으며, 작동기 비례계수와 카운터 포텐셔미터 비례계수 간에도 거의 일정한 차이가 존재함을 확인할 수가 있다.
구분 발사 1호기 발사 2호기
피치축 요축 피치축 요축
[deg/V] 0.2748 0.2738 0.2753 0.2760
[deg] 0.2493 0.0883 0.0318 0.0648
[deg/V] -0.3327 -0.3311 -0.3336 -0.3315
[deg] -0.1377 0.0131 -0.0635 -0.0864 표 6. 나로호 킥모터 TVC 노즐각 환산계수 분석 결과
나로호 2단 TVC 시스템의 경우, 노즐각 계산 시에 위의 어느 방식을 적용하더라도 거의 차이 나지 않는 결과를 얻을 수 있었기 때문에 적용의 편의성 측면에서 두 번째 방법을 적용하였다. 이 러한 유사성은 비행시험 이전에 수행된 수차례의 지상연소시험을 통해 검증하였는데, 킥모터 지상 연소시험에서 노즐각을 경사도계로 직접 계측한 결과와 포텐셔미터 측정전압으로부터 환산한 결 과는 그림 16~17 과 같다.
그림 16을 보면, 킥모터 연소초기 약 0.49도의 정적인 노즐각 명령구간에서 두 가지 방법으로 계산한 노즐각이 약 0.39도로 동일한 결과를 나
타내고 있으며 킥모터 노즐 팽창시의 노즐각 오 차 성분(약 0.1도) 또한 환산식으로 바로 확인 가 능함을 알 수가 있다. 그림 17은 경사도계 측정 결과로서 잡음 성분을 제거한 저주파 특성만이 의미를 가지는 바 그 값이 포텐셔미터 전압 기준 으로 환산한 노즐각과 거의 일치하므로 노즐각 환산식에 대한 적합성 확인이 가능하다.
노즐 팽창시의 노즐각 변동
그림 16. 지상연소시험 상황 노즐각 환산결과 비교
그림 17. 지상연소시험 상황 경사도계 측정 결과