交 通 工 學 大 韓 土 木 學 會 論 文 集
第30卷 第6D 號·2010年 11月 pp. 553~560
신호위반 단속건수에 영향을 미치는 요인에 관한 연구
- 대구시를 중심으로 -
A Study on the Factors Influencing the Number of Enforcement on Traffic Signal Violation
- Focused on Daegu City -
김기혁*·정윤재**
Kim, Ki-Hyuk·Jung, Youn-Jae
···
Abstract
This study examined the factors influencing the number of enforcement cases on traffic signal violation. The study collected enforcement data on traffic signal violation by multi-functional unmanned cameras across the Daegu metropolitan area, and analyzed the data to determine correlations among various factors including physical dimensions and engineering character- istics of the roadway as to how they would influence the number of violations. The resulting analysis provided a general model that assesses applicability for multi-functional unmanned cameras, and further shed helpful insights on efficient utilization of such traffic signal enforcement equipments in terms of installation thresholds and location. By identifying violation-prone fea- tures and characteristics and subsequent enforcement considerations, this research also supports safety efforts in reducing the number of traffic accidents as well.
Keywords : signal violation, enforcement, accident, traffic camera
···
요 지
본 연구는 신호위반 단속건수에 영향을 미치는 요인들에 관하여 자료를 수집하고 분석하여 신호위반 단속건수와의 관계를 규명하고 모형을 개발하여 예측된 모형을 통해 신호위반 단속건수에 영향을 미치는 요인에 대한 규칙을 파악하는 방법으로 교통사고의 위험을 항시 내포하고 있는 교통법규 위반행위가 빈번한 지역에 대한 무인다기능단속시스템의 설치기준을 제시 하고자 하는 연구이다.
핵심용어 : 신호위반, 단속건수, 영향, 요인, 교통사고
···
1. 서 론
1.1 연구의 배경 및 목적
1970년대 이후 우리나라는 급속한 경제성장을 이루었고 현 재에 이르러 경제력 측면에서 개인이나 국가 모두 선진국 수준에 도달해 있다. 또한, 성장과 함께 자동차등록대수도 1995년도 약 800만대에서 2007년도에 약 1,600만대로 증가 하였다. 이와 같은 지속적인 차량의 증가에도 불구하고 교 통사고건수는 2000년대부터 매년 조금씩 감소하고 있는 추 세이지만 신호위반에 의한 교통사고 건수는 매년 증가하고 있다.
과속과 함께 신호위반으로 인한 교통사고는 인명피해로 이 어질 확률이 매우 높은 편이며 이러한 사고를 줄이기 위해
서는 교통안전시설물의 개선이나 시민의식 향상이 필요하나 현실적으로는 단속이 가장 효율적인 대안이다. 그러나 인력에 의한 단속은 단속업무의 안전성과 단속의 공정성 등의 문제 로 무인단속시스템에 비하여 효율적인 면에서 떨어지는 단점 이 있어 인력단속에서 무인단속으로 확대·설치되고 있다.
무인단속시스템은 현행 교통단속처리지침 제 4편 제 46조 에 의해 교통사고 잦은 곳, 스쿨죤(School Zone), 실버죤 (Silver Zone)뿐만 아니라 법규위반행위 빈번한 곳 등에 정 성적인 기준지표에 의해 우선순위를 두어 설치가 이루어지 고 있다. 그 중에서 법규위반행위가 빈번한 곳에 대한 무인 단속시스템 설치지점 선정은 담당자의 주관적인 성향이 강 하고 충분한 현장실사를 거친다하더라도 조사시간에 한하여 교통흐름이 파악될 뿐 전체적인 교통흐름을 파악하기 힘들
*정회원·계명대학교 교통공학과 교수 (E-mail : [email protected])
**정회원·교신저자·도로교통공단 대구지부 사원 (E-mail : [email protected])
다. 또한, 법규위반행위가 빈번한 곳은 운전자의 운전심리를 자극하는 도로선형과 같은 물리적인 요인이나 교통량과 같 은 도로 외적인 요인들에 의해서 단속이 많이 이루어진다.
따라서 이러한 요인들에 대한 연구가 많이 이루어져 불필요 한 예산이 낭비되지 않도록 효율적인 무인단속시스템의 설 치를 위해 정량적인 기준지표가 필요하다.
본 연구에서는 신호위반 단속건수에 영향을 미치는 것으로 판단되는 요인들에 대한 자료를 수집하고 비교·분석하여 신 호위반 단속건수와의 관계를 살펴보았다. 그리고 분석된 신 호위반 단속건수에 영향을 미치는 요인으로 비선형적 모형 인 신경망 모형으로 모형화를 진행하고 규칙유도기법으로 예 측된 모형을 해석하여 분석된 자료가 차후 무인다기능단속 시스템의 설치지점을 설계하는데 기초자료로 활용하기 위함 이 본 연구의 목적이다.
1.2 연구의 내용 및 방법
본 연구는 신호위반에 영향을 미치는 요인에 대하여 알아 보기 위하여 대구시 전 구간의 2007년 이전에 설치된 무인 다기능단속시스템 중에서 신호연동이 이루어지는 가로구간이 포함된 지점에 대한 1년간의 신호운영 자료, 신호위반 단속 건수, 교통량 등과 같은 자료를 수집하였다. 연구수행 과정 은 다음과 같다.
첫 번째, 이론적 고찰로써 위반행위에 영향을 미칠 것으로 판단되는 요인이 실제 단속시스템에 어떠한 영향을 미치는 지에 관하여 진행된 기존관련연구에 대하여 살펴보고, 본 연 구에서 예측모형을 개발하는데 이용되는 신경망이론에 대한 내용을 알아본다.
두 번째, 무인다기능단속시스템이 설치된 지점 중에서 적절 한 지점을 선택하여 각 지점에 대한 신호위반 단속건수, 신호 운영자료, 교통량, 차로수, 도로선형 등과 같은 자료를 수집하 여 각 요인별 신호위반 단속건수와의 관계를 비교·분석한다.
세 번째, 신호위반 단속건수를 종속변수로 하여 신경망 모 형화를 통한 신호위반 단속건수에 미치는 요인에 관해 분석 하고 그 모형에 대한 결과를 검증한다. 그리고 그 모형에 대한 해석을 통하여 무인다기능단속시스템의 설치지점을 설 계하는데 기준을 제시한다.
2. 이론적 고찰 2.1 기존관련 문헌고찰
본 연구와 관련된 무인단속시스템에 영향을 미칠 것으로 판단되는 요인을 이용한 기존의 선행 연구를 살펴보면 유원 용(2009)은 신호연동의 여부가 무인단속시스템에 영향을 미 치는지를 알아보기 위하여 무인단속시스템과 교차로 신호연 동화가 동시에 이루어지는 경우와 신호연동화 없이 무인단 속시스템만 독립적으로 운영될 경우의 차이점을 통계분석 하 였다. 분석결과, 지역적 특성을 고려하였을 때 두 교차로의 통행량은 비슷하지만 분석된 데이터에서 보여 지는 차이점 은 무인단속시스템이 운영되고 있는 상태에서 신호연동화가 함께 이루어지는 지점의 단속데이터가 더 많고 과속으로 인 한 속도위반 데이터도 많은 것으로 분석되었다.
또 다른 연구로 안형준(2005)은 교통사고적인 측면에서 도
로선형에 따른 개별차량의 가·감속도에 초점을 두고 무인 과속단속시스템 적정설치지점 설계에 관한 연구를 진행하였 다. 문헌고찰을 통한 속도 및 가·감속도 값 및 가정을 통 한 값을 바탕으로 도로안전시설물 예고판 설치 기준식에 적 용하여 직선도로, 곡선도로, 내리막도로상에서의 무인과속단 속시스템의 설치지점에 대해 설계를 실시하였다. 분석결과, 도로선형에 따라 무인과속단속시스템의 적정설치지점이 다르 게 나타났고 이는 도로선형이 무인단속시스템에 영향을 미 치고 있음을 나타내는 것으로 확인되었다.
2.2 신경망이론
인공신경망은 인간의 두뇌에서 일어나는 자극-반응-학습과 정을 모사한 것으로 뉴런(Neuron)과 시냅스(Connection Link)로 구성된다. 인공신경망에서의 정보처리는 정보처리 단 위인 뉴런에서 일어나며, 이들 뉴런사이의 신호는 인공시냅 스인 연결링크(Connection Link)를 통해서 전달된다. 또한, 각각의 연결링크는 뉴런들 사이의 연결강도(Connection Strength)를 나타내는 가중치(Synaptic Weights)를 가지고 있 으며, 각 뉴런에서의 정보처리는 전달된 신호와 가중치의 곱 의 총합에 활성화함수(Activation Function)를 적용하여 출력 신호를 발생시킨다.
인공신경망은 병렬적인 구조를 사용하여 계산을 수행하며 지식을 학습하고 일반화시키는 능력을 가지고 있기 때문에 현재 다루기 힘든 대규모의 복잡한 문제의 해를 구하는데 사용가능하다.
3. 자료수집 및 분석 3.1 자료수집
대구시에서 운영되고 있는 무인다기능 단속시스템 중에서 분석대상이 되는 지점은 2007년 한 해 동안 장기간 고장이 나 이설이력이 없었고, 자료조사가 비교적 용이한 지점을 선 택하여 그림 1과 같이 30개소의 신호위반 단속건수를 파악 하였다.
또한, 선택된 지점에 대하여 신호위반 단속건수에 영향을 미칠 것으로 판단되는 요인들로 교통량, 상류부 교차로와 하 류부 교차로간의 거리, 차로수 및 교차로 폭, 도로선형, 교 차로 및 횡단보도, 연동의 정도를 나타내는 연동계수를 표 1과 같이 조사하였다.
3.2 자료분석
자료수집 결과 신호위반 단속건수가 많은 지점은 주로 교 통량이 많거나 교차로크기가 비교적 작다는 공통점이 발견 되었으며 이러한 자료를 바탕으로 신호위반 단속건수에 대 한 각 요인간의 관계를 비교·분석하였다. 먼저 교통량에 따 른 신호위반 단속건수는 그림 2에서 보는 바와 같이 교통량 이 커질수록 단속건수도 늘어나는 것으로 분석되었다. 4,000 대 미만부터 10,000대 이상~13,000대 미만까지는 일정하게 증가하는 모습을 보이고 있으나 13,000대 이상에서 급격히 높은 단속건수를 보이는 것으로 보아 교통량이 도로의 일정 수준 용량을 넘어섰을 경우에 단속이 더욱 많이 되는 것으 로 판단된다.
다음으로 연동계수는 연동효과를 나타내는 척도로서 연동 계수의 값이 작을수록 연동의 효과가 잘 이루어진다고 볼 수 있다. 따라서 그림 3을 볼 때 연동이 아주 잘 이루질 경우
신호위반 단속건수가 적게 나타나다가 연동계수가 0.4이상의 값을 나타내면서부터 점차 연동이 이루어지지 않을수록 신호 위반 단속건수도 작아지는 것으로 분석되었다. 이러한 패턴을 나타내는 원인으로 연동이 아주 잘 될 경우 차량진행대폭 (Bandwidth)이 통과교통량에 비해 아주 큰 값을 나타내게 되 어 신호교차로를 통과하는 모든 차량은 녹색시간의 서비스를 이용할 수 있으므로 신호위반을 통하여 교차로를 통과하지 않 는 경우가 많기 때문인 것으로 판단된다. 또한 연동이 잘되지 않는 경우 신호위반 단속건수가 저조한 것은 상류부 교차로 에서 출발한 차량이 하류부 교차로의 딜레마 존에 진입하기 전에 적색등화가 이루어지기 때문인 것으로 판단된다.
상하류 교차로간의 거리에 따른 신호위반 단속건수의 분석 결과는 교차로간의 거리가 멀수록 일정하게 단속건수도 많 표 2. 교통량에 따른 신호위반 단속건수
구 분 평균단속건수
4,000대 미만 853
4,000대 이상~7,000대 미만 1,165 7,000대 이상~10,000대 미만 1,712 10,000대 이상~13,000대 미만 2,199
13,000대 이상 5,113
그림 2. 교통량에 따른 신호위반 단속건수
표 3. 연동계수에 따른 신호위반 단속건수
구 분 대당 평균단속건수
(단속건수/교통량/10,000)
0.2미만 4.1
0.2이상~0.4미만 10.1
0.4이상~0.6미만 12.9
0.6이상~0.8미만 6.4
0.8이상~1미만 3.4
1이상 3.6
그림 1. 조사대상 지점도
표 1. 신호위반 단속건수에 영향을 미칠 것으로 판단되는 요인에 대한 조사방법 신호위반 단속건수에 영향을
미칠 것으로 판단되는 요인 조사 방법
교통량 루프검지기를 통한 차량진입시의 전기적인 변화를 감지하는 방법으로 교통량 파악 상류부교차로와 하류부교차로간의 거리 인터넷 지도사이트에서의 항공사진을 활용하여 상류부교차로의 정지선을 기준으로 하류
부교차로의 정지선까지의 거리를 파악 차로수 및 교차로 폭 현장조사
도로선형 종단선형과 평면선형으로 구분하여 현장조사
교차로 및 횡단보도 현장조사
연동계수 수집된 신호DB자료를 활용하여 도로용량편람(2005)에서 제시된 연동계수 계산법에 따 라 연동계수 산정
아지는 것으로 나타났다. 이것은 차량이 상류부 교차로를 지 나서 가속을 하게 되고 어느 정도의 일정한 주행속도에 이 르렀을 때에 하류부의 교차로의 신호가 적색등화의 조짐이 보이면 감속보다는 가속을 하는 경향이 크기 때문인 것으로 판단된다.
교차로 폭에 따른 신호위반 단속건수에 대한 분석결과는 그림 5에서 보는 바와 같이 교차로 폭이 작을수록 단속건수 가 많은 것으로 나타났다.
종단선형에 따른 신호위반 단속건수에 대한 분석결과는 그 림 6에서 보는 바와 같이 평지구간과 오르막구간에서 가장
신호위반 단속건수가 많은 것으로 나타났고 내리막구간은 단 속건수가 작은 것으로 나타났다.
평면선형에 따른 신호위반 단속건수에 대한 분석결과로서 그림 7에서 보는 바와 같이 좌로 굽은 도로가 가장 신호위 반 단속건수가 많은 것으로 나타났고 우로 굽은 도로, 직선 도로 순으로 단속건수가 분포되어 있는 것으로 나타났다. 직 선도로가 굽은 도로에 비하여 신호위반 단속건수가 적은 이 유는 시인성이 좋은 신호위반·과속단속 장비 팻말과 단속 카메라가 함께 하류부 교차로에서 설치되어 운영 중인 모습 이 잘 보이기 때문인 것으로 판단된다. 또한 좌로 굽은 도 로가 우로 굽은 도로보다 신호위반 단속건수가 많은 것은 운전자의 좌석 위치상 좌로 굽은 도로일 경우 전방의 교통 시설물에 대한 시거가 부족하기 때문인 것으로 판단된다.
그림 4. 상·하류 교차로간의 거리에 따른 신호위반 단속건수
표 5. 교차로 폭에 따른 신호위반 단속건수
구 분 대당 평균단속건수
(단속건수/교통량/10,000)
20m미만 12.5
20m이상~40m미만 9.5
40m이상~60m미만 3.9
60m이상 3.3
그림 5. 교차로 폭에 따른 신호위반 단속건수
표 6. 종단선형에 따른 신호위반 단속건수
구 분 대당 평균단속건수
(단속건수/교통량/10,000)
내리막 3.9
평지 6.3
오르막 6.1
그림 6. 종단선형에 따른 신호위반 단속건수 그림 3. 연동계수에 따른 신호위반 단속건수
표 4. 상·하류 교차로간의 거리에 따른 신호위반 단속건수
구 분 대당 평균단속건수
(단속건수/교통량/10,000)
300m미만 4.7
300m이상~600m미만 8.1
600m이상~900m미만 9.8
900m이상 13.9
표 7. 평면선형에 따른 신호위반 단속건수
구 분 대당 평균단속건수
(단속건수/교통량/10,000)
좌로 굽은 도로 10.1
직선 도로 5.0
우로 굽은 도로 7.4
교차로 및 횡단보도에 따른 신호위반 단속건수에 대한 분 석결과는 그림 8과 같이 횡단보도가 교차로보다 신호위반 단속건수가 더 많은 것으로 나타났다.
편도 차로수에 따른 신호위반 단속건수에 대한 분석결과는 편도 차로수가 적을수록 신호위반 단속건수가 많은 것으로 나타났다. 이러한 결과가 나온 이유는 무인다기능단속시스템 은 위반행위가 가장 많이 이루어지는 차로를 대상으로 단속 을 수행하지만 대부분 한 개의 차로만을 단속한다. 따라서 같은 정도의 신호위반이 행해진다고 하더라도 편도 차로수 가 많을수록 신호위반 단속건수는 작게 분포될 수 있기 때 문에 차량은 차로선택의 폭이 좁은 편도 2차로의 도로인 경 우에 다른 편도 차로수에 비하여 월등히 많은 값을 나타내 는 것으로 판단된다.
4. 모형개발 및 검증 4.1 모형개발
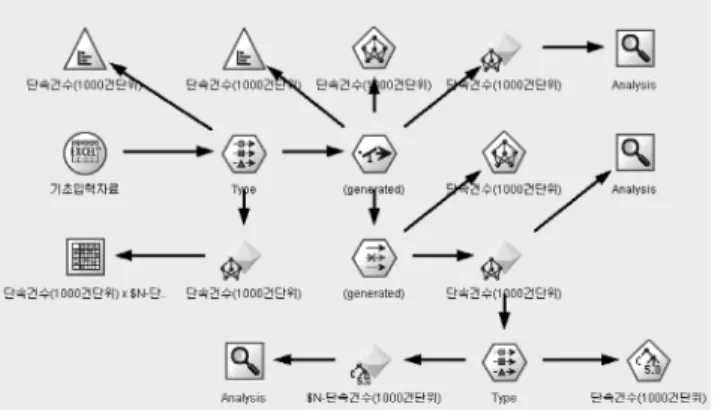
본 연구에서는 Clementine 11.1에서 제시하고 있는 신경 망 모형인 ‘Quick’ 알고리즘을 이용하여 모형화 과정을 수 행하였으며 실수형태인 목표변수의 유형을 1,000건 단위를 기준으로 하는 범주형 데이터로 변환하여 모형화를 진행하 였다. 그 결과, 신호위반 단속건수가 1,000건 미만인 지점이 14개소로 3,000건 이상인 지점에 비해 많은 차이가 나는 것 을 알 수 있었다. 이와 같은 범주의 비율 간 불균형성은 신 호위반 단속건수에 대한 모형화에 있어 문제가 된다. 그 이 유는 한 범주에 대한 비율이 아주 큰 값을 나타내는 경우 모형화를 잘 하지 않아도 모든 예측을 가급적 최대비율 범 주로 함으로써 그 비율만큼의 상대적 빈도로 성공할 수 있 기 때문이다. 따라서 본 연구에서는 Balance 노드를 이용하 여 이를 교정하였다. 자료의 크기가 크지 않으므로 비율이 가장 큰 범주를 기준으로 자료를 표 11과 같이 증대(Boost) 시켰다.
결정된 목표변수의 유형과 함께 모형화에 사용될 입력변수 의 유형을 설정하였다. 각 입력변수의 유형에 따라 연속형 (Range), 다항 범주형(Set), 이항 범주형(Flag)으로 설정하였 으며 그 내용은 표 12와 같다.
신경망 모형에서는 많은 파라미터들이 추정되므로 과다적 그림 8. 교차로 및 횡단보도에 따른 신호위반 단속건수
표 9. 편도 차로수에 따른 신호위반 단속건수
구 분 대당 평균단속건수
(단속건수/교통량/10,000)
편도 2차로 16.9
편도 3차로 8.5
편도 4차로 4.4
편도 5차로 3.6
그림 9. 편도 차로수에 따른 신호위반 단속건수
표 10. 범주화된 목표변수
구 분 Count %
1,000건 미만 14 46.67
1,000건 이상~2,000건 미만 7 23.33 2,000건 이상~3,000건 미만 5 16.67
3,000건 이상 4 13.30
합 계 30 100.00
표 11. 교정된 목표변수
구 분 Count %
1,000건 미만 14 24.56
1,000건 이상~ 2,000건 미만 14 24.56 2,000건 이상~ 3,000건 미만 15 26.32
3,000건 이상 14 24.56
합 계 57 100.00
표 8. 교차로 및 횡단보도에 따른 신호위반 단속건수
구 분 대당 평균단속건수
(단속건수/교통량/10,000)
교차로 5.4
횡단보도 8.1
그림 7. 평면선형에 따른 신호위반 단속건수
합이 발생하기 쉽다. 따라서 주어진 자료를 나누어 어느 정 도는 파라미터 추정에 쓰이고 나머지는 모형적합이 지나치 게 추구되지 않도록 신경망 모형의 훈련을 통제하도록 하여 야 한다. 본 연구에서는 자료가 크지 않은 점을 고려하여 훈련자료로 전체자료의 75%를 사용하고 나머지 25%를 잠 정 모형의 검토에 사용하도록 하였다. 그 외의 나머지 값들 은 디폴트 세팅 그대로 두었다.
이와 같은 방법으로 Neural Net 노드에서 훈련되어 생성 된 모형은 광석모양의 노드로 생성되어 표현이 된다. 신경망 알고리즘의 일부가 난수에 의존하므로 분석마다 20번 이상 의 훈련과정을 거쳐 가장 정확도가 높은 모형을 선택하여 분석하였다. 훈련된 모형의 분석결과는 표 13과 같으며 훈련
자료에 대한 모형의 정확도는 100%로 아주 높은 값을 보이 고 있다. 그리고 입력층의 뉴런수는 연속형(Range)이나 이항 범주형(Flag)의 데이터는 입력 필드의 한 개당 하나의 뉴런 으로 구성되나 다항 범주형(Set)의 경우에는 한 필드가 가지 는 범주의 수만큼 뉴런을 가지게 되어 12개의 뉴런으로 구 성되었다. 또한, 은닉층에서 뉴런의 수는 입력한 값대로 3개 의 뉴런으로 구성되고 출력층에서 뉴런의 수는 목표변수의 범주가 4개로 분류되므로 4개의 뉴런으로 구성된다.
자료수집 단계에서 선택된 지점들이 다양한 요인을 나타내 지 못하는 자료조사의 한계로 인해 입력변수자료의 양이 부 족하였다. 그렇기 때문에 모형화의 충분한 설명력을 나타내지 못하게 되는 결과를 초래하는 변수를 제외하고 분석을 하였 으며 훈련된 모형의 분석결과는 표 15와 같다. Clementine 11.1에서는 각 입력변수의 중요도를 제공하는데 주요변수만 그림 10. Clementine 11.1의 신경망 모형화 과정
표 13. 신경망 모형의 분석결과
훈련자료의 정확도 100%
입력층의 뉴런수 12
은닉층의 뉴런수 3
출력층의 뉴런수 4
입력변수의 중요도 평가
교차로간 거리 0.361628
교차로 및 횡단보도 0.339541
종단선형 0.255425
연동계수(PF) 0.0974578
편도 차로수 0.0461322
교통량 0.0
표 12. 입력변수의 유형 및 범위
입력변수 유형 범위
신호위반 단속건수 다항 범주형 (Set) “1,000건 미만”, “1,000건 이상~2,000건 미만”,
“2,000건 이상~3,000건 미만”, “3,000건 이상”
교통량 연속형 (Range) 3,542대~13,675대
연동계수 (PF) 연속형 (Range) 0.049~1.168
상류부교차로와 하류부교차로간 거리 연속형 (Range) 126m~1130m
편도 차로수 다항 범주형 (Set) “2차로”, “3차로”, “4차로”, “5차로”, “6차로”
종단선형 다항 범주형 (Set) “내리막”, “오르막”, “평지”
평면선형 다항 범주형 (Set) “우로 굽은 도로”, “좌로 굽은 도로”, “직선구간”
교차로 및 횡단보도 이항 범주형 (Flag) “횡단보도”, “교차로”
교차로 폭 연속형 (Range) 17m~77m
표 14. 훈련된 모형의 예측값 정확도
Correct 21 26.32%
Wrong 36 73.68%
Total 57 100.00%
표 15. 주요변수만 입력한 신경망모형의 분석결과
훈련자료의 정확도 92.31%
입력층의 뉴런수 7
은닉층의 뉴런수 3
출력층의 뉴런수 4
입력변수의 중요도 평가
교차로간 거리 0.562552
연동계수(PF) 0.538791
종단선형 0.498836
교차로 및 횡단보도 0.328565
편도 차로수 0.124578
표 16. 주요변수만 입력하여 훈련된 모형의 예측값 정확도
Correct 48 84.21%
Wrong 9 15.79%
Total 57 100.00%
입력한 신경망 모형의 분석결과에서는 교차로간 거리, 연동 계수(PF), 종단선형, 교차로 및 횡단보도, 편도 차로수 순으 로 중요도를 평가하고 있다. 분석 후 생성된 노드에 기존의 입력 자료를 통과시키게 되면 모형에서 훈련된 정보대로 새 로운 예측 값을 만들어 내게 되며 그 결과는 표 16과 같다.
여기서 훈련된 모형의 예측 값의 정확도는 84.21%로 아주 높은 값을 보이고 있어 모형이 가지는 설명력은 아주 높은 것으로 판단된다.
4.2 모형의 검증
앞서 개발된 모형은 목표변수인 신호위반 단속건수에 대한 범주의 비율간의 불균형성으로 인해 자료의 크기를 증대시 켜 만들어진 모형이다. 따라서 이러한 모형에 실제의 데이터 를 통과 시켜보는 방법으로 모형에 대한 검증을 해볼 필요 가 있다.
모형검증 과정 결과, 표 17에서 보는 바와 같이 총 예 측 정확도는 80%[=(10+6+4+4)/30]로 나타났으며 각각 신호 위반 단속건수가 1,000건 미만인 경우는 71.4%로 나타났고, 1,000건 이상이고 2,000건 미만인 경우는 85.7%로 나타났다 . 그리고 2,000건 이상이고 3,000건 미만인 경우는 80%, 3,000건 이상인 경우는 100%로 전체적으로 높은 정확도를 나타내었다.
4.3 모형의 해석
신경망 분석의 가장 큰 단점 중에 하나는 예측의 결과가 나오기까지의 과정과 그 구체적인 중간모형을 알기 어렵다 는 것이다. 그러나 규칙유도기법은 이런 신경망의 예측기능 을 보완해줄 수 있는 특징이 있다. 따라서 규칙유도기법을 활용하여 예측된 결과와 다른 입력변수들 간의 관계를 살펴 봄으로 각 요인들이 예측된 모형에 어떻게 작용하는지 알 수 있다. 본 연구에서는 Clementine 11.1의 C5.0을 이용하 여 신경망모형에서 예측된 결과에서 입력된 요인들에 대한 해석 과정을 진행하였다.
그림 12는 C5.0을 이용한 Rule set 모형 결과로서 “IF...
THEN” 형식으로 출력된다. 분석 시의 편의를 위해서 연동 계수를 PF로, 교차로 및 횡단보도를 교/횡으로, 교차로간 거 리를 거리로 표현하였다.
분석결과, 분류된 규칙은 총 7개로 구분되었으며 그 내용 으로는 첫째, 1,000건 미만의 경우에는 연동계수의 값이 0.751초과이고 교차로간 거리가 257m 이하일 때 분류된다.
표 17. 예측데이터와 실측데이터의 교차 분석표 실측된 신호위반
단속건수(1,000건 단위)
예측된 신호위반 단속건수(1,000건 단위) 1,000건 미만 1,000건 이상
~2,000건 미만 2,000건 이상
~3,000건 미만 3,000건 이상 Total
1,000건 미만 Count 10 0 3 1 14
% 71.429 0.000 21.429 7.143 100
1,000건 이상~
2,000건 미만
Count 1 6 0 0 7
% 14.286 85.714 0.000 0.000 100
2,000건 이상~
3,000건 미만
Count 1 0 4 0 5
% 20.000 0.000 80.000 0.000 100
3,000건 이상 Count 0 0 0 4 4
% 0.000 0.000 0.000 100.000 100
Total Count 12 6 7 5 30
% 40 20 23.333 16.667 100
그림 11. C5.0을 이용한 예측된 모형의 자료 분석과정
그림 12. C5.0을 이용하여 출력된 Rule set모형
둘째, 1,000건 이상~2,000건 미만의 경우에는 교차로간 거리 가 167m초과이고 횡단보도일 때, 연동계수의 값이 0.211이 하일 때, 연동계수의 값이 0.751초과이고 교차로간 거리가 257m초과일 때 분류된다. 셋째, 2,000건 이상~3,000건 미만 의 경우에는 연동계수의 값이 0.211초과이고 0.751이하이며 교차로간 거리가 279m이하이고 교차로일 때 분류된다. 넷째, 3,000건 이상의 경우에는 교차로간 거리가 167m이하이고 횡 단보도일 때, 연동계수의 값이 0.211초과이고 0.751이하이며 교차로간 거리가 279m초과일 때 분류된다.
여기서 목표변수의 범주구분 옆에 나타난 괄호안의 수치 중에서 앞의 숫자는 위의 규칙을 만족시킨 신호위반 단속건 수의 개수를 나타내고 뒤의 숫자는 위 규칙의 신뢰도 (Confidence)를 의미한다. 즉, 이 규칙에 속한 데이터가 맞게 분류된 비율을 나타내는 것이다. 여기서 신호위반 단속건수 의 정도를 구분하는 잣대는 연동계수와 교차로 및 횡단보도, 교차로간 거리에 달려있다는 것을 알 수 있다.
신경망 모형의 예측 값과 그 값을 목표변수로 하여 분석 한 C5.0분석을 비교한 결과 표 18과 같이 94.74%의 정확 도로 아주 높은 값을 나타내었다. 이것으로 신경망 모형의 예측 값에 대한 원인으로 C5.0의 결과 값이 설명될 수 있 음을 알 수 있다.
5. 결 론
본 연구에서는 무인다기능단속시스템의 신호위반 단속건수 에 영향을 미치는 요인을 분석하여 각 변수들과의 관계를 나타내고 신경망 모형을 통한 모형화를 실시한다. 그렇게 예 측된 값에 규칙유도기법을 활용하여 해석하고 이해하는 방 법으로 차후 무인다기능단속시스템의 적정설치지점을 설계하 는데 기초자료로 쓰일 수 있도록 하는 것이 목적이다. 이러 한 연구목적에 따라 연구과정을 수행하여 얻은 결과를 토대 로 도출된 결론은 다음과 같다.
첫째, 신경망 모형으로 분석을 하여 신호위반 단속건수에 영향을 미치는 주요 변수로서 교차로간 거리, 연동계수(PF), 종단선형, 교차로 및 횡단보도, 편도 차로수의 순으로 평가 되었다.
둘째, 예측된 신경망 모형의 결과 값을 규칙유도기법으로 분석한 결과 연동계수(PF), 교차로간 거리, 교차로 및 횡단 보도의 변수에 따라 분류기준을 정하였고, 신호위반 단속건
수 예측 시에 가장 중요한 변수는 분석결과에서 분류과정에 가장 먼저 기준으로 제시된 연동계수인 것으로 분석되었다.
셋째, 선택된 요인의 신호위반 단속건수별 분류기준은 먼 저 1,000건 미만의 경우에는 연동계수의 값이 0.751초과이고 교차로간 거리가 257m이하일 때 분류되었다. 그리고 1,000 건 이상~2,000건 미만의 경우에는 교차로간 거리가 167m초 과이고 횡단보도일 때, 연동계수의 값이 0.211이하일 때, 연 동계수의 값이 0.751초과이고 교차로간 거리가 257m초과일 때로 분류되었다. 또한, 2,000건 이상~3,000건 미만의 경우 에는 연동계수의 값이 0.211초과이고 0.751이하이며 교차로 간 거리가 279m이하이고 교차로일 때 분류되었다. 마지막으 로 3,000건 이상의 경우에는 교차로간 거리가 167m이하이 고 횡단보도일 때, 연동계수의 값이 0.211초과이고 0.751이 하이며 교차로간 거리가 279m초과일 때 분류되었다.
이러한 분석의 결과로써 무인다기능단속시스템의 적정설치 지점 설계 시에 고려해야 할 요인으로 어떠한 것이 있으며 어떠한 기준으로 구분을 해야 하는지 기준이 제시되었다. 하 지만 연구수행 시 충분한 시간적인 여유와 인적인 요인과 차량요인등과 같이 신호위반 단속건수에 큰 영향을 미칠 것 으로 판단되는 요인들에 관한 자료수집이 이루어져 연구를 수행하였다면 좀 더 정확한 결과를 얻을 수 있었을 것이라 판단된다. 현재 무인단속시스템에 영향을 미치는 요인에 관 한 연구가 많이 이루어지지 않고 있지만 점차 많은 연구가 진행된다면 차후 무인단속시스템 지점설계에 있어서 효율적 인 선택이 가능할 것으로 판단되며 본 연구는 앞으로 있을 연구에 방법론을 제시했다는 점과 기초자료로서 활용될 수 있다는 점에서 성과를 이루었다고 할 수 있다.
참고문헌
건설교통부(1999) 도로용량편람 개선 연구, 교통개발연구원.
건설교통부(2005) 도로용량편람.
김대수(1989) 신경망 이론과 응용, 하이테크정보.
도로교통공단(2008) 무인교통단속장비 운영관리.
박성룡(2000) 신경망이론을 이용한 도시고속도로 돌발상황 감지모 형의 적용에 관한 연구, 석사학위논문, 한양대 도시대학원.
안형준, 이영인(2005) 무인과속단속시스템 적정설치지점 설계에 관한 연구, 한국ITS학회지, 한국ITS학회, pp. 221-226.
원제무(1998) 도시교통론, 박영사.
유원용(2009) 교차로 교통신호 연동화에 따른 신호위반 무인단속장 비의 운영 적정성 분석, 석사학위논문, 아주대학교 ITS대학원.
이용구, 허명회(2008) 데이터 마이닝 모델링과 사례, 한나래.
이찬노, 최재성, 하태준(1998) 신경망을 통한 도시간선도로의 교 통사고 요인분석연구. 대한토목학회논문집, 대한토목학회, 제 18권 제III-6호, pp 803-810.
허준, 최병주(2001) 클레멘타인을 이용한 데이터마이닝, 데이터솔 루션.
SPSS (2007) Clementine 11.1 user's guide, Intergal Solutions Lim- ited.
(접수일: 2010.5.3/심사일: 2010.5.30/심사완료일: 2010.6.17) 표 18. 예측된 값을 목표변수로 하여 C5.0 분석된 예측 값 정
확도
Correct 54 94.74%
Wrong 3 5.26%
Total 57 100.00%