Copyright
Ⓒ2012 KSAE / 120-03 pISSN 1225-6382 / eISSN 2234-0149
DOI http://dx.doi.org/10.7467/KSAE.2012.20.6.017Transactions of KSAE, Vol. 20, No. 6, pp.17-23 (2012)
능동전륜조향장치 및 능동후륜제동장치의 통합제어기 개발
송 정 훈*
동명대학교 메카트로닉스공학과
Development of an Integrated Control System between Active Front Wheel System and Active Rear Brake System
Jeonghoon Song*
Department of Mechatronics Engineering, Tongmyong University, Busan 608-711, Korea (Received 4 July 2011 / Revised 11 December 2011 / Accepted 5 June 2012)
Abstract : An integrated dynamic control (IDCF) with an active front steering system and an active rear braking system is proposed and developed in this study. A fuzzy logic controller is applied to calculate the desired additional steering angle and desired slip of the rear inner wheel. To validate IDCF system, an eight degree of freedom, nonlinear vehicle model and a sliding mode wheel slip controller are also designed. Various road conditions are used to test the performance. The results show that the yaw rate of IDCF vehicle followed the reference yaw rate and reduced the body slip angle, compared with uncontrolled vehicle. Thus, the IDCF vehicle had enhanced lateral stability and controllability.
Key words : IDCF(Integrated Dynamics Control with AFS, 통합운동제어), AFS(Active Front Steering, 능동전륜조 향), Active rear braking(능동후륜제동), Fuzzy control(퍼지제어), Sling mode control(슬라이딩 모드 제어)
Nomenclature
1)B
roll, K
roll: vehicle rolling damping/stiffness coefficient C
αf, C
αr: lateral tire stiffness of front and rear tire I
x, I
z: vehicle inertia moment about the roll/yaw
axis
I
xz: sprung mass product of inertia about the roll and yaw axis
m
s, m
total: sprung mass/vehicle total mass
T
roll: rolling resistance torque
: yaw/roll angle
: positive constants
: desired rear wheel slip/slip
*
Corresponding author, E-mail: [email protected]
1. 서 론
차량 주행 안전성을 향상시키기 위한 연구는 초 기 4륜 조향시스템(4WS) 개발에서 최근 능동전륜 조향장치(AFS) 개발에 이르기까지 지난 약 30년간 지속적으로 이루어지고 있다.
1,2)특히 AFS는 운전자 의 조향 입력에 능동 조향각을 더함으로써 차량의 조향성능 및 횡방향 안정성을 향상시키기 위한 장 치이다. AFS는 미끄러운 노면 등에서 조향 입력의 응답성을 향상시켜 운전자가 조향 불능 상태에 처 하지 않도록 도와주는 역할을 한다.
3)하지만 AFS는 타이어 횡방향 힘을 조정하는 것으로 타이어-노면 의 점착이 한계에 가까워지면 차량 안정성 및 조향 성이 급격히 악화되는 단점이 있다.
4)한편 오른쪽 및 왼쪽 바퀴의 제동 압력을 독립적
으로 제어하여 차량 회전에 필요한 최적 요 모멘트
송 정 훈
를 발생시키는 Direct Yaw moment Control (DYC) 시 스템에 대한 연구도 활발히 진행되고 있다.
5,6)이 시 스템은 타이어 종방향 힘을 직접적으로 제어한다는 점에서 점착 한계를 확장시킬 수 있는 장점이 있지 만 일반 주행 시 주행 성능을 악화시킬 수 있다는 단 점이 있다.
6)따라서 조향장치 및 제동장치를 적절히 결합하여 타이어에서 발생되는 힘을 조정한다면 점 착 한계를 확장시킬 수 있으며 한계 부근에서도 차 량 제어성을 향상시킬 수 있다.
7)하지만 조향장치 및 제동장치를 독립적으로 제어 할 경우 두 장치에 의한 차량 운동 효과는 상호 밀접 히 관련되어있어 성능 향상에 대한 큰 기대를 할 수 없을 뿐만 아니라 오히려 성능 악화를 유발할 수 있 다.
8)즉, 두 장치를 동시에 통합적으로 제어하여야 한다. 통합 제어를 위하여 model matching 방법
4)이 나 LQR 제어법
5)등 다양한 방법들이 제안되고 있으 나 최근 퍼지제어 방법
2)이 많이 연구되고 있다.
이 연구에서는 fuzzy logic control 방법을 이용하 여 능동전륜조향장치와 능동후륜제동장치의 통합 운동 제어기(IDCF, Integrated Dynamics Control with AFS)를 개발하고 제안한다. IDCF는 차량의 요 속도 가 목표 요 속도(reference yaw rate)를 추종하게 하며 동시에 body slip angle을 최소화시키도록 한다.
2. 차량 모델
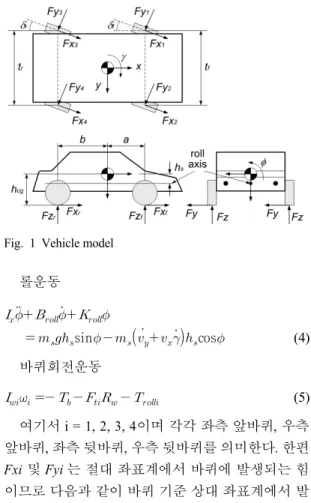
이 연구에서는 IDCF를 개발하기 위하여 8 자유도 를 가지는 비선형 전체 차량 모델(full car model)을 설계하였다(Fig. 1).
9-11)종방향 운동
(1)
횡방향 운동
(2)
요 운동
(3)
Fig. 1 Vehicle model
롤운동
sin
cos (4) 바퀴회전운동
(5)
여기서 i = 1, 2, 3, 4이며 각각 좌측 앞바퀴, 우측 앞바퀴, 좌측 뒷바퀴, 우측 뒷바퀴를 의미한다. 한편 Fxi 및 Fyi 는 절대 좌표계에서 바퀴에 발생되는 힘 이므로 다음과 같이 바퀴 기준 상대 좌표계에서 발 생되는 힘을 이용하여 계산한다.
cos
sin
(6)
sin
cos
(7) 여기서 F
ti및 F
si는 Dugoff 타이어 모델을 이용하 여 계산한다.
12)
는 조향각을 뜻하며 만약 이 값이 작다면 전륜조향각(
) 및 후륜조향각(
)은 다음과 같이 가정한다.
(8) 한편 차량 제동 시 각 바퀴의 슬립은 다음과 같다.
(9)
3. 통합제어기 설계
이 연구에서 개발하고자하는 IDCF 제어기는 차
능동전륜조향장치 및 능동후륜제동장치의 통합제어기 개발
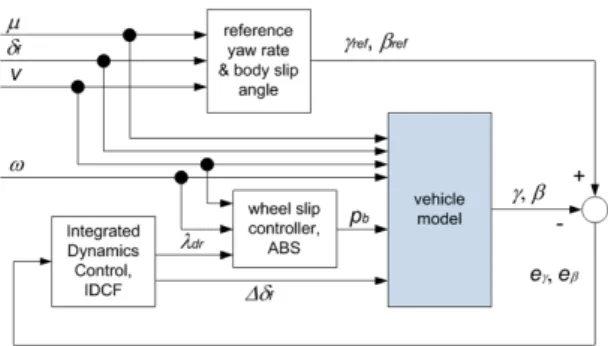
Fig. 2 Integrated dynamics controller with AFS
량의 요 속도 및 body slip angle을 동시에 제어하는 차량 통합제어기이다. 두 개의 제어 요소를 제어하 기 위해서는 두 개의 제어 입력이 필요하다. 여기서 는 AFS를 이용하여 전륜 조향각을 제어하며 ABS (Anti-lock Brake System)는 IDCF에서 계산된 후륜 목표 슬립(λ
dr)를 입력받아 후륜 제동압력을 제어한 다(Fig. 2). 차량 안정성 및 조향성을 향상시키기 위 하여 요 속도는 목표 요 속도를 추종하게 하며 body slip angle은 최소화시키는 방법을 사용한다.
5,7)목표 요 속도는 다음과 같다.
(10)
여기서
한편 차량이 진행하는 방향과 향하고 있는 방향 의 차이각을 뜻하는 body slip angle은 작을수록 조향 성능 및 제어성능이 우수하다고 평가할 수 있다.
9,10)따라서 이 연구에서는 목표 body slip angle은 0으로 설정하였다. 여기서 요 속도는 자이로스코프 등을 이용한 센서로 측정 가능하지만 body slip angle은 직 접적인 측정이 거의 불가능하다. 따라서 비선형 관 측기 등을 이용하여 추정하여야 한다.
9,11)3.1 IDCF Fuzzy logic controller
퍼지제어는 비선형제어법의 일종으로 입력이 정 확하지 않아도 우수한 결과를 얻을 수 있는 강인성 을 가진 제어방법이다. 또한 제어기의 구성이 상대 적으로 간단하고 복잡한 수식의 유도나 결과식이
Fig. 3 Processing steps of fuzzy system
필요하지 않다는 장점이 있다. 일상적인 모호한 언 어로 제어량을 결정하기 때문에 안정성이나 조향성 을 명확히 결정짓기 어려운 자동차 제어에 알맞은 장점이 있다.
13)Fig. 3은 퍼지제어의 과정을 나타내고 있다. 먼저 제어 입력은 fuzzification 과정을 거쳐 언어적 입력 으로 변환된다. 이 후 퍼지 규칙을 통하여 계산된 언 어적 출력은 defuzzification 과정을 거쳐 제어 출력 으로 변환된다.
퍼지 제어기의 입력은 요 속도 오차(
)와 body slip angle 오차(
)이다. 제어 입력은 다음과 같이 정 의된다.
= yaw rate - reference yaw rate
= body slip angle - reference body slip angle 퍼지 출력은 능동 조향각(additional steer angle,
)과 차량 선회 운전 시 후륜 안쪽 바퀴의 슬립 (
)으로 선정하였다. 후륜 안쪽 바퀴의 슬립을 선 정한 이유는 차량 선회 운동 시 차량 운동에 가장 큰 영향을 미치기 때문이다.
10,11)입력 및 출력은 각각 7 개 및 9개의 삼각형 멤버쉽 함수로 구성되며 Mamdani 퍼지 추론 모델을 사용하였다(Figs. 4, 5).
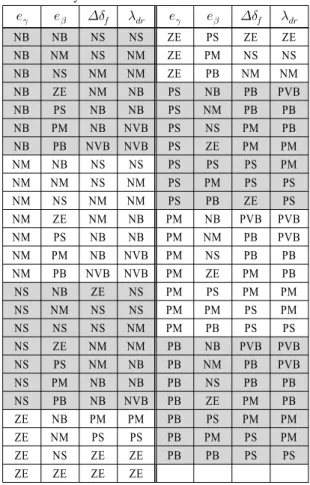
13)Tablel 1은 요 속도 오차 입력과 body slip angle 오 차 입력에 대한 IDCF의 퍼지 규칙을 나타낸다. 표 에서 NVB, NB, NM, NS, ZE, PS, PM, PB, PVB는 각각 Negative Very Big, Negative Big, Negative Medium, Negative Small, Zero Equal, Positive Small, Positive Medium, Positive Big, Positive Very Big을 나타낸다.
퍼지 제어기에서 계산된 능동 조향각 및 슬립은
Jeonghoon Song
Fig. 4 Membership functions for inputs
and
Fig. 5 Membership functions for outputs
and
Table 1 Fuzzy rules
NB NB NS NS ZE PS ZE ZE
NB NM NS NM ZE PM NS NS
NB NS NM NM ZE PB NM NM
NB ZE NM NB PS NB PB PVB
NB PS NB NB PS NM PB PB
NB PM NB NVB PS NS PM PB
NB PB NVB NVB PS ZE PM PM
NM NB NS NS PS PS PS PM
NM NM NS NM PS PM PS PS
NM NS NM NM PS PB ZE PS
NM ZE NM NB PM NB PVB PVB
NM PS NB NB PM NM PB PVB
NM PM NB NVB PM NS PB PB
NM PB NVB NVB PM ZE PM PB
NS NB ZE NS PM PS PM PM
NS NM NS NS PM PM PS PM
NS NS NS NM PM PB PS PS
NS ZE NM NM PB NB PVB PVB
NS PS NM NB PB NM PB PVB
NS PM NB NB PB NS PB PB
NS PB NB NVB PB ZE PM PB
ZE NB PM PM PB PS PM PM
ZE NM PS PS PB PM PS PM
ZE NS ZE ZE PB PB PS PS
ZE ZE ZE ZE
각각 조향 장치 및 제동 장치로 전달된다. 여기서 목 표 슬립은 0보다 크며 노면에 상관없이 최대 제동력
을 발휘한다고 알려진 0.2 보다 작도록 설계한다. 결 과적으로 후륜 안쪽 바퀴에는 ABS 제어기에 의해 제동력이 가해지며 후륜 바깥쪽 바퀴는 제동력이 가해지지 않는다. 이 제동력의 차이가 요 모멘트를 발생시키며 차량의 자세 제어를 수행하게 된다.
3.2 ABS sliding mode controller
ABS는 차량의 급제동시 제동 거리를 단축하고 조향성을 유지시키기 위하여 개발된 제품이다. 이 연구에서는 IDCF 제어기에서 계산된 목표 슬립값 을 제동 압력을 이용하여 실현화시키기 위하여 채 택되었다. 식 (5) 및 (9)로부터 유도된 ABS sliding mode controller는 다음과 같다.
9-11)
(11)
4. 시뮬레이션 결과
개발되어진 IDCF 제어기 및 차량 모델의 성능 평 가를 위하여 Matlab/Simulink를 이용하여 차량 동역 학 시뮬레이션 프로그램을 작성하였다. Table 2는 이 연구에 사용된 차량의 주요 제원을 나타낸다.
14)설계되어진 IDCF의 성능을 평가하기 위하여 Fig. 6 에 나타낸 조향입력을 가하였다. 주어진 사인파 조
Table 2 Vehicle specificationa = 1.203m I
xz = 0kgm2b = 1.217m I
z = 1627kgm2B
roll = 2600N rad/sm
s = 1160kgC
αf, C
αr = 30000N/radm
total = 1280kgh
cg = 0.5mt
f, t
r = 1.33mh
s = 0.2mR
b = 0.16mI
x = 489.9kgm2R
w = 0.3mFig. 6 Steering input
Development of an Integrated Control System between Active Front Wheel System and Active Rear Brake System
(a) (b)
(c) (d)
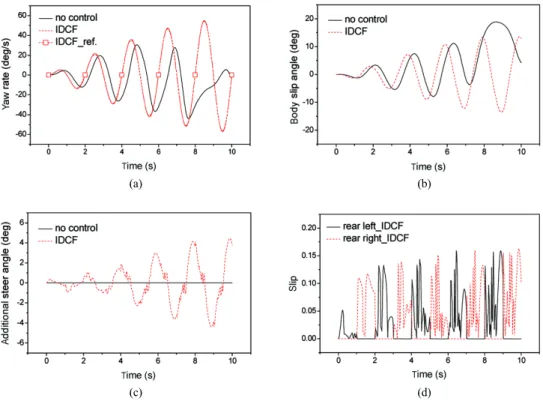
Fig. 7 Vehicle responses on dry asphalt
향 입력의 주기는 변화가 없으며 진폭만 점차 증가 하는 것으로 설정하였다. 노면 조건은 건조한 아스 팔트(Fig. 7), 젖은 아스팔트(Fig. 8) 그리고 눈길(Fig.
9)이며 초기 속도는 각각 30m/s, 25m/s 그리고 15m/s 로 설정하였다. 이때 제동 압력은 제어되는 바퀴를 제외하고 가해지지 않으며 엔진에서의 traction force 도 없다고 가정하였다.
위의 운전조건에서 차량 응답을 살펴보면 노면이 미끄러워지거나 조향입력이 커지면 IDCF가 장착되 지 않은 차량은 쉽게 차량 안정성 및 조향성을 잃어 버리는 것을 확인할 수 있다. 즉, 요 속도는 조향입 력에 제대로 반응하지 않으며(Figs. 7(a), 8(a), 9(a)) body slip angle은 발산하게 된다(Figs. 7(b), 8(b), 9(b)). 하지만 IDCF가 장착된 차량은 건조한 아스팔 트 및 젖은 아스팔트에서 요 속도가 목표 요 속도에 거의 완벽한 추종성을 보이며 조향입력에 잘 반응 하는 것을 확인할 수 있다. 또한 body slip angle 역시 조향입력에 반응하며 제어되지 않은 차량에 비하여 크기가 감소하였음을 알 수 있다. 이는 차량의 조향 성 및 안정성이 개선되었음을 의미하며 능동 조향
각 및 후륜 안쪽 바퀴의 제동력이 통합적으로 적절 하게 제어되었기 때문으로 판단된다. Figs. 7(c), 8(c), 9(c)는 IDCF를 장착한 차량의 능동 조향각을 나타 내고 있으며 Figs. 7(d), 8(d), 9(d)는 각 노면 상태에 서 슬립을 나타내고 있다. 능동 조향각 및 슬립은 조 향 입력이 커짐에 따라 점점 커지지만 슬립은 0에서 0.2 사이를 유지하고 있다. 조향 입력은 사인 함수의 일종이므로 후륜 안쪽 바퀴는 조향각에 따라 지속 적으로 변경되고 있다.
한편 Fig. 9는 눈길에서 IDCF를 장착하지 않은 차
량과 장착한 차량의 응답을 나타내고 있다. IDCF 장
착 차량의 요 속도는 목표 요 속도를 완벽하게 추종
하지는 못하였으나 조향 입력은 잘 추종하고 있는
것을 볼 수 있다. 이는 차량의 주행 조건이 타이어와
노면의 점착한계 부근이라는 것을 나타내며 IDCF
는 이 영역에서도 조향 성능을 어느 정도 확보할 수
있음을 의미한다. 하지만 IDCF가 장착되지 않은 차
량은 요 속도가 조향입력에 거의 반응하지 않기 시
작하는 약 4.5초 이후부터는 한계 조건을 넘어 조향
불능 상태에 빠진 것으로 판단된다.
송 정 훈
(a) (b)
(c) (d)
Fig. 8 Vehicle responses on wet asphalt
(a) (b)
(c) (d)
Fig. 9 Vehicle responses on snow paved road
능동전륜조향장치 및 능동후륜제동장치의 통합제어기 개발
5. 결 론
이 연구는 능동전륜조향장치(AFS)와 능동후륜 제동장치를 동시에 통합제어하는 차량 샤시 통합제 어장치(IDCF)의 개발 및 성능 평가에 관련된 것이 다. 이를 위하여 8자유도의 비선형 차량 모델을 이 용하였으며 통합제어를 위하여 IDCF fuzzy logic controller를 설계하였다. IDCF 제어기는 최적의 능 동 조향각과 차량 선회시 후륜 안쪽 바퀴의 슬립을 계산하며 ABS sliding mode controller는 슬립을 압력 값으로 실현시킨다.
개발된 IDCF 제어기는 건조한 아스팔트, 젖은 아 스팔트 그리고 눈길에서 성능 평가를 실시하였다.
IDCF를 장착한 차량은 건조한 아스팔트 및 젖은 아 스팔트에서 요 속도가 목표 요 속도를 거의 완벽하 게 추종하였으며 body slip angle도 감소되었음을 확 인할 수 있었다. 이러한 결과는 IDCF로 인하여 한계 조건에서 차량의 안정성 및 조향성이 개선되었다는 것을 의미한다. 또한 눈길에서도 점착 한계를 확장 시킬 수 있었으며 한계 부근에서 차량의 안정성 및 조향성을 유지시킴을 알 수 있었다.
후 기
이 논문은 2011년도 정부(교육과학기술부)의 재 원으로 한국연구재단의 기초연구사업 지원을 받아 수행된 것임(2011-0021973).
References
1) Q. Z. Qu and J. W. Zu, “Variable Structure Model Following Control of Four-wheel-stee- ring Vehicle,” Int. J. Vehicle Design, Vol.37, No.4, pp.291-310, 2005.
2) M. J. L. Boada, B. L. Boada, A. Munoz and V.
Diaz, “Integrated Control of Front-wheel Stee- ring and Front Braking Forces on the Basis of Fuzzy Logic,” Proc. IMechE, Part D: J. Auto- mobile Engineering, Vol.220, pp.253-267, 2006.
3) K. Willy, R. Gerd and R. Wolfgang, “Concept and Functionality of the Active Front Steering System,” SAE 2004-21-0073, 2004.
4) J. Y. Wu, H. J. Tang, S. Y. Li and S. B. Zheng,
“Integrated Control System Design of Active
Front Wheel Steering and Four Wheel Torque to Improve Vehicle Handling and Stabiltiy,”
Int. J. Automotive Technology, Vol.8, No.3, pp.299-308, 2007.
5) M. Nagai, M. Shino and F. Gao, “Study on Integrated Control of Active Front Steer Angle and Direct Yaw Moment,” JSAE Review, Vol.23, pp.309-315, 2002.
6) M. Shino and M. Nagai, “Yaw-moment Control of Electric Vehicle for Improving Handling and Stability,” JSAE Review, Vol.22, pp.473-480, 2001.
7) J. He, D. A. Crolla, M. C. Levesley and W. J.
Manning, “Coordination of Active Steering, Drive- line, and Braking for Integrated Vehicle Dynamics Control,” Proc. IMechE, Part D: J. Automobile Engineering, Vol.220, pp.1401-1421, 2006.
8) D. Li, X. Shen and F. Yu, “Integrated Vehicle Chassis Control with a Main/Servo-Loop Struc- ture,” Int. J. Automotive Technology, Vol.7, No.7, pp.803-812, 2006.
9) J. Song, “Comparison and Evaluation of Steer Yaw Motion Controllers with an Anti-lock Brake System,” Proc. IMechE, PartD : J. Automobile Engineering, Vol.223, No.4, pp.503-518, 2009.
10) J. Song and W. S. Che, “Comparison and Evaluation of Brake Yaw Motion Controllers with an Antilock Brake System,” Proc. IMechE, Part D : J. Automobile Engineering, Vol.222, No.7, pp.1273-1288, 2008.
11) J. Song and W. S. Che, “Comparison between Braking and Steering Yaw Moment Controllers Considering ABS Control Aspects,” Mecha- tronics, Vol.19, No.7, pp.1126-1133, 2009.
12) H. Dugoff, P. S. Fancher and L. Segel, “An Analysis of Tire Traction Properties and Their Influence on Vehicle Dynamic Performance,”
SAE 700377, 1970.
13) H. T. Nguyen, N. R. Prasad, C. L. Walker and E.
A. Walker, A First Course in Fuzzy and Neural Control, Chapman & Hall/CRC, New York, 2003.
14) D. E. Smith and J. M. Starkey, “Effects of Model Complexity on the Performance of Automated Vehicle Steering Controllers: Model Develop- ment, Validation and Comparison,” Veh. Syst.
Dynamics, Vol.24, pp.163-181, 1995.