저작자표시-비영리-동일조건변경허락 2.0 대한민국 이용자는 아래의 조건을 따르는 경우에 한하여 자유롭게 l 이 저작물을 복제, 배포, 전송, 전시, 공연 및 방송할 수 있습니다. l 이차적 저작물을 작성할 수 있습니다. 다음과 같은 조건을 따라야 합니다: l 귀하는, 이 저작물의 재이용이나 배포의 경우, 이 저작물에 적용된 이용허락조건 을 명확하게 나타내어야 합니다. l 저작권자로부터 별도의 허가를 받으면 이러한 조건들은 적용되지 않습니다. 저작권법에 따른 이용자의 권리는 위의 내용에 의하여 영향을 받지 않습니다. 이것은 이용허락규약(Legal Code)을 이해하기 쉽게 요약한 것입니다. Disclaimer 저작자표시. 귀하는 원저작자를 표시하여야 합니다. 비영리. 귀하는 이 저작물을 영리 목적으로 이용할 수 없습니다. 동일조건변경허락. 귀하가 이 저작물을 개작, 변형 또는 가공했을 경우 에는, 이 저작물과 동일한 이용허락조건하에서만 배포할 수 있습니다.
공학석사 학위논문
중력보상기를
적용한 다관절 로봇의
연구
A Study on the Manipulator Robot Applied to a Gravity
Compensator
지도교수
최 형 식
2010 년 2 월
한국해양대학교
대학원
기
계 공 학 과
허
재 관
本
論文을 許載官의 工學碩士 學位論文으로 認准함.
위
원 장 정 재 현 (인)
위
원 최 형 식 (인)
위
원 조 종 래 (인)
2010 년 2 월
한국해양대학교
대학원
목
차
ABSTRACT ... 1 그 림 목 차 ... 2 표 목 차 ... 3 제 1 장 서론... 4 제 2 장 중력 보상기를 적용한 6축 매니퓰레이터의 설계 ... 6 2.1 역학 계산을 통한 액추에이터 선정 ... 6 2.1.1 액추에이터 0번의 부하 토크 계산... 8 2.1.2 액추에이터 1번 및 2번의 부하 토크 계산 ... 10 2.1.3 액추에이터 3번 및 5번의 부하 토크 계산 ... 12 2.1.4 액추에이터 4번의 부하 토크 계산... 13 2.2 6축 로봇의 경량화 설계 ... 15 2.3 중력 보상기의 최적화 적용 연구 ... 18 2.3.1 중력 보상기의 구조... 18 2.3.2 각 축의 모터 선정 및 중력보상기의 성능 시뮬레이션 ... 21 제 3 장 6축 로봇의 기구학 해석 ... 25 3.1 6축 로봇의 순기구학 해석... 25 3.2 6축 로봇의 역기구학 해석... 28 3.3 6축 로봇의 기구학 시뮬레이션... 323.4 6축 다관절 로봇의 속도 기구학 해석... 33 3.5 6축 다관절 로봇의 동역학 해석 ... 35 3.6 매트랩 시뮬링크를 이용한 동역학 시뮬레이션 ... 39 제 4 장 제어 시스템의 설계... 47 4.1 전체 제어 시스템의 구성 ... 47 4.2 모션 컨트롤러의 구성 ... 48 4.2.1 모션 컨트롤러의 특징 ... 48 4.2.2 T-68PR 단자대의 구성... 50 4.3 모터 드라이버의 구성 ... 53 4.3.1 모터 드라이버의 특징 및 전원부 구성 ... 53 4.3.2 전자 브레이크 구동회로의 구성 ... 55 4.3.3 모터 드라이버의 전자 기어비 설정... 56 4.3.4 제어용 컨트롤 박스의 구성 ... 58 제 5 장 결론... 59 참 고 문 헌 ... 60 APPENDIX... 61 A.1 기구학 해석 검증용 매트랩 소스 ... 61 A.2 자코비안 계산 결과 ... 63 A.3 동역학 패러미터 계산 결과 ... 64 A.4 동역학 계산 매트랩 소스... 68 감사의 글
A Study on the 6-Axis Manipulator Robot applied to a
Gravity Compensator
Hur Jae-Gwan
Department of Mechanical Engineering
Graduate School, Korea Maritime University
Abstract
In this paper, the structure of a gravity compensator was studied, and the 6-axis manipulator robot applying the gravity compensator was presented to improve the performance of the robot. The robot had 6 DOF and is driven by the joint actuator adopting the gravity compensator. The weight of the robot was designed to be 30kg but to deal with 25kg payload thanks to the gravity compensator. The kinematics analysis on the robot was presented. Also, a simulation of the robot performance was presented by applying various payloads. According to the simulation results, it was validated that the payload effect on the joint actuator adopting the gravity compensator is reduced in proportion to the spring intensity of the gravity compensator.
그
림 목 차
Fig. 2.1 Construction of actuator... 6
Fig. 2.2 Diagram of 0th axis ... 8
Fig. 2.3 Free body diagram of 1st and 2nd axis ... 10
Fig. 2.4 Diagram of 3rd and 5th axis... 12
Fig. 2.5 Free body diagram of 4th axis... 13
Fig. 2.6 Concept of 6 axis robot... 15
Fig. 2.7 Manufactured 6-axis robot ... 15
Fig. 2.8 Equivalent stress of 6-axis robot ... 16
Fig. 2.9 Equivalent stress of 6-axis robot ... 17
Fig. 2.10 Structure of gravity compensator ... 18
Fig. 2.11 Joint actuator with gravity compensator... 19
Fig. 2.12 Structure of gravity compensator ... 19
Fig. 2.13 Force/torque relation of gravity compensator ... 20
Fig. 2.14 Structure of 4 bar linkage at 1st~2nd axis ... 23
Fig. 2.15 Efficiency of gravity compensator at 1st link... 24
Fig. 2.16 Efficiency of gravity compensator at 2nd link... 24
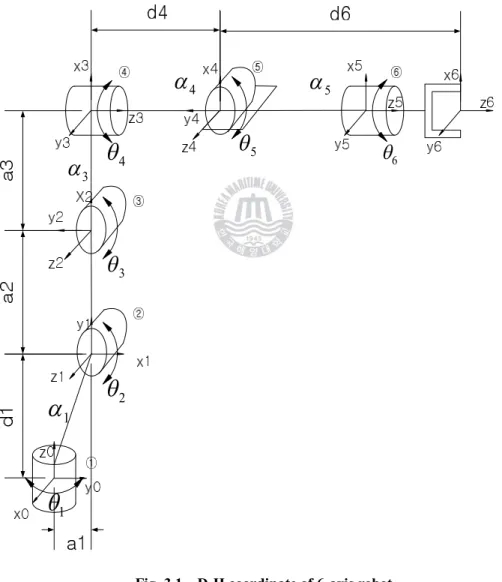
Fig. 3.1 D-H coordinate of 6-axis robot ... 25
Fig. 3.2 Digram of robot about
q
1... 29Fig. 3.3 Digram of robot about
q
2~
q
3... 29Fig. 3.4 Graph of circle contour tracking by using inverse kinematics ... 32
Fig. 3.5 Simulink source for dynamics about 6-axis robot ... 39
Fig. 3.6 PID controller for simulation about 6-axis robot... 39
Fig. 3.7 Simulink source for parameter about 6-axis robot... 40
Fig. 3.8 Step response of 0th axis... 41
Fig. 3.9 Torque output of 0th axis about step input... 41
Fig. 3.10 Step response of 1st axis... 42
Fig. 3.11 Torque output of 1st axis about step input ... 42
Fig. 3.12 Step response of 2nd axis ... 43
Fig. 3.13 Torque output of 2nd axis about step input ... 43
Fig. 3.14 Step response of 3rd axis ... 44
Fig. 3.16 Step response of 4th axis... 45
Fig. 3.17 Torque output of 4th axis about step input... 45
Fig. 3.18 Step response of 5th axis... 46
Fig. 3.19 Torque output of 5th axis about step input... 46
Fig. 4.1 Whole construction of the system ... 47
Fig. 4.2 PCI-N804 board ... 48
Fig. 4.3 Diagram of PCI-N804 board... 49
Fig. 4.4 Wiring digram of motion controller with Mitsubishi motor driver... 50
Fig. 4.5 Construction of pulse by using line driver method... 51
Fig. 4.6 Construction of control system about motion controller... 52
Fig. 4.7 Circuit of magnetic contact by using relay... 53
Fig. 4.8 Construction of control system about motor driver ... 54
Fig. 4.9 Circuit of electronic break... 55
Fig. 4.10 Picture of circuit for electronic break ... 55
Fig. 4.11 Picture of control box for 6 axis manipulator... 58
표
목 차
Table 1 Properties of aluminum alloy ... 16Table 2 Parameter of each axis ... 21
Table 3 Parameter of each axis about maximum torque and moment of inertia... 22
Table 4 Specification about selected motor of each axis ... 22
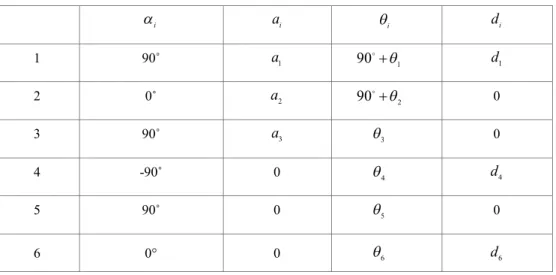
Table 5 Parameter of D-H coordinate of 6-axis robot ... 26
제
1 장 서론
인류의 역사를 크게 분류해보면, 우선 풍부한 식재료를 생산할 수 있는 기술을 개발 한 농업 혁명, 그리고, 18세기의 영국에서 시작되었던 산업혁명이 있었다. 그리고 20세 기를 지나 현재의 21세기는 컴퓨터 산업의 발달과 더불어 이루어진 자동화∙정보화의 시 대라고 할 수 있다. 자동화의 가장 큰 물결은 ‘인간에 의해 분업화 되어 있던 공장’이 20세기의 전자 산업 및 컴퓨터 산업의 발달과 함께 무인화의 길을 걷고 있는 점이다. NC, CNC, 머시닝 센터 등의 자동화 된 공작기계의 발전이 계속 되었고, 21세기에 이르 러서는 혼다의 아시모, 가와다의 HRP-2, 도요다의 I-FOOT, KIAST의 휴보 등과 같이[1-3] ‘스타워즈’등의 공상 과학물에서 볼 수 있었던 인간형 로봇들이 계속해서 제작되고 있을 정도로 로봇 산업의 지속적인 발전이 이루어지고 있으며, 특히 산업용 로봇의 경 우 실용성을 바탕으로 그 적용 분야가 점차 확대되는 추세이다. 산업용 로봇은 정밀성, 신속성, 경제성, 안정성의 측면에서 검증된 구조가 필요하며, 이러한 산업용 로봇의 기구부적인 형태는 크게 저 부하, 단순 반복 작업인 조립작업에 적합한 스칼라 로봇 및 직교 로봇과 제품의 형상이 복잡하고 작업반경이 커질 경우 사 용되는 다관절 로봇으로 나눌 수 있다[4]. 이들 스칼라 및 다 관절 로봇의 구조적 공 통점은 직렬로 연결된 연쇄적인 링크 구조다[5][6]. 연쇄적인 구조는 동작반경이 넓고 동작속도가 빠른 장점이 있으나 중량이 관절의 거리에 따라 누적되어 부과되는 단점이 있다.. 특히, 다관절 로봇은 중력의 영향을 받아 스칼라 로봇에 비해 훨씬 큰 토크부하 가 로봇의 관절 구동기에 가해진다. 따라서 모터와 감속기의 용량이 커야 하고 이에 따 라서 로봇의 부피와 중량이 커질수밖에 없다. 로봇의 구조에서 상단 관절 링크에 부착 된 모터와 감속기는 하부 관절 링크를 구동하는 모터의 부하가 되는 구조로 상단 관절 구동 모터의 용량이 커질수록 하단 관절의 부하가 증가하는 구조적인 단점을 갖는다[7]. 로봇의 부하 토크를 증가시키기 위해서 하모닉 드라이버나 RV 감속기와 같은 고 기 어비를 갖는 감속기를 적용하고 있으나 이들의 일정 비율 이상의 토크 성능 증가는 불 가능하다. 이러한 문제를 해결하기 위하여 강성을 매우 높이는 병렬구조로 Stewart Platform이 제안되었고[8], 이를 로봇에 적용한 연구가 Minsky[9], Hunt[10], Mohamed[11] 등에 의해 수행되었다. 하지만 병렬형 로봇은 강성은 매우 높으나 기구메커니즘의 해석 이 매우 복잡하고 작업 반경이 작은 것이 현실적인 적용을 어렵게 하는 주된 요인이다.상 장치에 관한 연구[12]가 수행되었다. 케이블 풀리 구조는 높은 보상력을 얻을 수 있 지만 다양한 관절 링크에 적용하기에는 형태가 복잡해지고, 조립에 있어서도 유연성이 떨어지는 단점이 있었다. 그리고 Fattah, A.에 의해 질량 중심에 스프링 구조를 적용한 매니퓰레이터의 중력 밸런싱 기법에 관한 연구[13]를 수행한 결과가 있었다. 기존의 매니퓰레이터의 토크 저감 장치의 단점을 보완하기 위한 새로운 형태의 구조 로써 구동부에 직접 부착이 가능하고, 기구부의 해석이 간단하도록 스프링 구조를 적용 한 중력 보상기의 적용에 관한 연구가 있었다[14][15]. 새로운 형태의 중력보상기는 액 추에이터와 동일한 축에 간단하게 장착이 가능하며, 산업용 로봇을 비롯하여, 이족 보 행 로봇 등의 다양한 분야에 적용이 용이한 구조이다. 본 논문에서는 6축의 매니퓰레이터 구조를 갖는 다 관절 로봇의 부하토크 감쇠를 위 한 최적화 된 중력 보상기의 구조를 설계 및 시뮬레이션하고, 경량이면서도 높은 가반 하중을 적용할 수 있도록 매니퓰레이터에 가해지는 부하 및 가반 하중의 영향에 대한 역학조사를 실시에 따른 모터 선정과 FEM 해석을 통하여 경량화 설계에 대한 안정성 을 확인할 것이다. 또한 6축 로봇의 구동에 필요한 기구학적 해석과 동역학적 모델링 에 대하여 논할 것이다. 시스템의 제어를 위한 하드웨어 구성으로 Mitsubishi사의 AC 서보 모터를 이용한 시 스템을 구현하고, 상용하는 펄스 타입의 모션제어기를 사용한 전체 시스템을 구성하였 다.
제
2 장 중력 보상기를 적용한 6축 매니퓰레이터의 설계
2.1 역학 계산을 통한 액추에이터 선정
로봇에 적용되는 액추에이터를 선정하기 위해서는 각 링크의 자중과 가반 하중에 의
해 발생하는 토크와 가 감속시의 관성력에 의한 토크를 적용하여 안정범위 이내의 정
격토크를 갖는 모터를 선정하는 것이 중요하다.
Fig. 2.1 Construction of actuator
본 연구에서 설계한 로봇의 각 축의 구조는 Fig. 2.1과 같다. 각각의 액추에이터에 적용되는 최대 토크를 계산하기 위하여 최대치의 부하를 받을 경우의 정역학적인 해석 을 수행하고, 가 감속 구간에서의 관성 모멘트를 구하여 각각의 링크에 최적화된 모터 와 그에 대한 감속비를 선정하였다. 각 축의 관성 모멘트를 계산하기 위하여 다음과 같은 일반적인 관성 모멘트 관계식 을 이용하였다. 회전축(Z )이 질량중심과 일치 할 때 Z축에 대한 관성모멘트(Iz)
2 2
1
(
)
12
ZI
=
m a
+
b
(2.1.1) 회전축( Z )이 끝단에 연직한 봉의 Z 축에 대한 관성모멘트(Iz) 21
3
zI
=
m l
×
(2.1.2) 회전축( Z )이 중심축을 통과하는 중공 원주의 Z축에 대한 관성모멘트(Iz) 2 2 1 21
(
)
2
zI
=
m r
+
r
(2.1.3) 부피 V , 높이 H 인 원기둥의 반지름 r 은 다음과 같다. V r Hp
= × (2.1.4) 중심축을 통과하는 원주로 가정하는 경우 해당 구조물을 2700 3 / kg m 의 밀도를 갖는 알루미늄으로 가정하고, 해당 구조물의 부피를 결정한 후 해당 구조물의 최대 직경을 외경으로 하고, 구조물과 높이와 부피가 같은 중공 원주를 구하여 그에 대한 관성 모멘 트를 구한다. 회전축이 질량중심에서 거리가 d만큼 떨어져 있을 때 Z 축에 대한 관성모멘트는 2 e ZI
=
I
+
md
(2.1.5) 여기서 I 는 각속도에 의한 관성모멘트를 나타내며 Z 2 md 은 선속도에 발생하는 힘에 의한 반력으로 나타나는 관성력을 나타낸다. 위의 관성 모멘트 관계식과 최대 부하 지 점에서의 정역학 해석을 통해 각 축의 최대 부하토크에 대한 계산을 수행하였다. 관성 모멘트의 경우 구조물의 형상이 복잡한 경우 정확한 계산식 또한 복잡한 형태를 갖는 다. 본 연구에서는 각각의 구조물을 실제 관성 모멘트보다 큰 값을 갖는 형태로 단순 화하여 각각의 액추에이터에 발생하는 관성 모멘트를 계산하였다.2.1.1 액추에이터 0번의 부하 토크 계산 1 m 2 m 3 m L m
Fig. 2.2 Diagram of 0th axis
액추에이터 0번의 관성 모멘트 계산을 위하여 Fig.2.2와 같이 m , 1 m 와 같은 중심축2 과 회전축이 일치하는 중공원주와 m 와 같은 3 l 의 길이를 갖는 봉의 형상을 갖는 형상3 으로 전체 로봇의 구조물을 단순화 하였다. 액추에이터 0번에 걸리는 부하는 m , 1 m , 2 3 m , m 에 의한 각각의 관성 모멘트의 합과 같다. 각각의 관성 모멘트를 구해보면 다L 음과 같다. 2 2 1 1 1 1 1 ( ) 2 m o i I = m r +r (2.1.6) 2 2 2 2 2 2 1 ( ) 2 m o i I = m r +r (2.1.7) 식 (2.1.6), (2.1.7)에서 2 1 o r , 2 1 i r 은 질량 m 을 중공원주 형상으로 단순화 하였을 경우의 1 외경 및 내경을 나타내고, 2 2 o r , 2 2 i r 은 질량 m 의 단순화에 대한 외경 및 내경을 나타낸2 다.
2 3 3 3 1 3 m I = m l× (2.1.8) 2 2 2 3 1 ( ) 12 mL L L L L I = m a +b +m l (2.1.9) 0 m1 m2 m3 mL I =I +I +I +I (2.1.10)
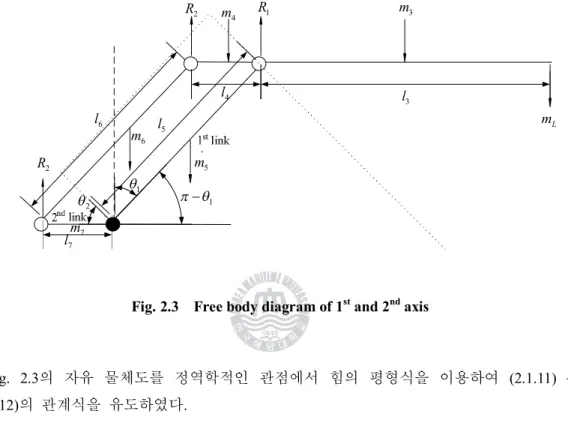
2.1.2 액추에이터 1번 및 2번의 부하 토크 계산 액추에이터 1번 및 2번에 걸리는 부하토크를 계산 하기 위하여 Fig. 2.3 과 같은 자유 물체도를 그리고 부하토크에 대한 관계를 파악하였다. 설계된 6축 로봇의 3D 도면 정 보를 이용하여 Table 2와 같이 링크에 대한 정보를 구하였다. 5 m 5 l 4 m 4 l 3 l 3 m L m 1 R 2 R 2 R 1 q 1 p q -2 q 6 l 6 m 7 lm7
Fig. 2.3 Free body diagram of 1st and 2nd axis
Fig. 2.3의 자유 물체도를 정역학적인 관점에서 힘의 평형식을 이용하여 (2.1.11) ~ (2.1.12)의 관계식을 유도하였다. 1 2 3 4 L R+R =m +m +m (2.1.11) 2 4 3 c3 L 3 4 c4 R l =m l× +m l× +m l× (2.1.12) 여기서 질량 중심에 해당하는 거리를 l 로 표기하였다. ci 위의 관계식을 이용하여 R1,R2를 각각 구하고 그에 의해 발생하는 토크를 구해보면 다음과 같다. 1 ( 1 5 5 5) cos( 1) 2 c c g R l m l p t = × - × + × × -q (2.1.13) 2 g R lc 2 4 cos( )2 t = × × × q (2.1.14)
각각의 관성모멘트를 구하기 위한 관계식을 구하였다. 4절 링크 구조의 경우 구조적 으로 한 축이 회전할 때 각속도와 선속도를 동시에 갖는 두 쌍의 항과 선속도만을 갖 는 하나의 항으로 일반화하여 표현할 수 있으며, 그에 대한 표현은 다음과 같다. 2 2 2 2 1 5 6 5 5 6 6 3 4 5 5 2 2 2 2 2 2 5 5 6 6 5 5 6 6 3 4 5 5 I ( ) 1 1 ( ) 3 3 m m c c L c c L I I m l m l m m l m l m l m l m l m l m m l m l = + + + + + + = + + + + + + (2.1.15) 2 2 2 2 2 2 2 3 7 3 4 3 7 7 6 7 3 2 2 2 2 2 2 2 2 3 3 7 7 3 4 3 7 7 6 7 3 1 ( ) ( ) 12 1 1 1 ( ) ( ) 3 3 12 m m c c L L L L c c L L L L I I I m m l m l m l m a b m l m l m l m m l m l m l m a b m l = + + + + + + + + = + + + + + + + + (2.1.16)
2.1.3 액추에이터 3번 및 5번의 부하 토크 계산 액추에이터 3번의 경우 연결된 링크와 액추에이터 4번의 링크가 수직이면서 지면에 수평을 이룰 경우 최대의 부하 모멘트를 갖게 되며 크기는 액추에이터 4번의 최대 모 멘트와 같다. 3 4 t = (2.1.17) t 3번 및 5번 액추에이터의 관성 모멘트를 계산하기 위하여 Fig. 2.4과 같은 단순화를 행한 후 각각의 모멘트를 계산하였다. 3 m L m
Fig. 2.4 Diagram of 3rd and 5th axis
각각의 관성 모멘트를 구해보면 다음과 같다. 2 2 3 3 3 3 1 ( ) 2 m o i I = m r +r (2.1.18) 2 2 1 ( ) 12 mL L L L I = m a +b (2.1.19) 여기서 2 3 o r , 2 3 i r 는 각각 m 에 해당하는 중공 원주의 외경과 내경을 나타내며, 3 3 m3 mL I =I +I (2.1.20) 5 mL I =I (2.1.21) 의 관계가 있다.
2.1.4 액추에이터 4번의 부하 토크 계산 액추에이터 4번의 부하 토크를 계산하기 위하여 Fig. 2.5와 같은 자유 물체도를 그리 고 상관관계를 파악하였다. L m 8 m 8 l 5 q
Fig. 2.5 Free body diagram of 4th axis
여기서 외부하중 m 과 자체하중 L m 의 부하로 인한 토크를 계산하면 다음과 같다. 8 4 gc cos 5 (m l8 c8 m lL 8) t = × q × × + × (2.1.22) 액추에이터의 관성 모멘트는 다음과 같다. 2 2 2 2 4 8 8 8 1 1 ( ) 3 12 L L L L I = m l× + m a +b +m l (2.1.23)
2.1.5 관성력에 의한 토크 각 관절 구동기에 작용하는 토크는 크게 가속운동, 등속운동, 감속운동에 대한 토크 로 3단계로 나눌 수 있다. 관성력에 의한 토크(
T
i ), 가속에 필요한 토크(T
a+ ), 등속에 필요한 토크(T
c), 감속에 필요한 토크(T
a-)는 다음과 같다. i e iT
= ×
I
a
(2.1.24) i fT
a+= +
T T
(2.1.25)0.5
c fT
=
T
=
N m
×
(2.1.26) f iT
a-=
T
-
T
(2.1.27)2.2 6축 로봇의 경량화 설계
기존의 6축 로봇에서는 Fig. 2.6의 좌측과 같이 고중량의 이송을 위한 밸런서 구조를 채택하고, 좌우로 돌출된 형태의 고용량 모터를 사용하는 구조가 주로 사용되어 왔다. 본 연구에서 적용한 6축 로봇의 경우는 이러한 밸런서 구조를 제거하고 Fig. 2.6의 우 측과 같은 고 중량의 밸런서를 대체하여 중력 보상기를 적용하고 좌우로 돌출된 모터 구조를 밸트 풀리 구조를 이용하여 내부에 장착하여 전체적으로 경량이면서 고중량의 이송이 가능한 6축 로봇 설계하였다. 6축 로봇에 적용한 중력 보상기의 경우 고정판을 중간에 위치 시키고 양쪽으로 회전 판에 의한 중력 보상 효과를 얻는 구조를 채택하여 단순한 구조를 설계하였다. 제작한 6축 로봇은 Fig. 2.7과 같다.Fig. 2.6 Concept of 6 axis robot
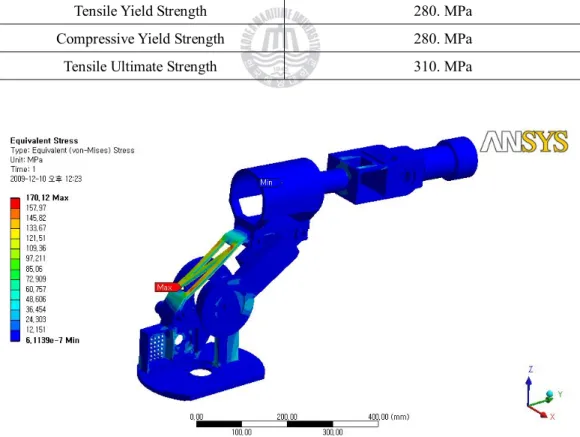
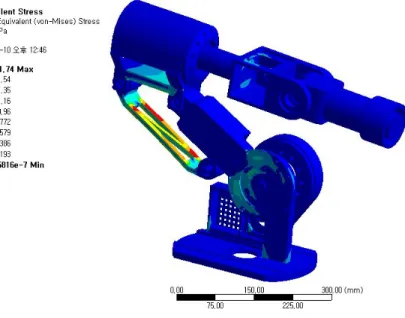
Fig. 2.8과 Fig. 2.9에서 6축 로봇의 가반 하중을 25kg으로 가정하였을 경우의 FEM 해 석 결과를 나타냈다. 6축 로봇의 제작에 사용한 알루미늄 합금에 대한 해석을 위하여 Table 1과 같은 물성치를 사용하였다. 로봇의 팔을 펼쳤을 경우와 반대의 경우로 나누 어서 두 번의 해석을 실시한 결과 각각의 최대 응력이 170.12MPa과 181.74MPa으로 물 성치의 인장 및 압축 항복강도인 280MPa 이내의 범위에 들어오는 것을 확인할 수 있 다. 결과적으로 설계한 로봇이 25kg가량의 가반 하중을 지지하였을 경우의 구조적 결 함이 없음을 확인하였다.
Table 1 Properties of aluminum alloy
Structural
Young's Modulus 71000 MPa
Poisson's Ratio 0.33
Density 2.77e-006 kg/mm³
Thermal Expansion 2.3e-005 1/°C
Tensile Yield Strength 280. MPa
Compressive Yield Strength 280. MPa
Tensile Ultimate Strength 310. MPa
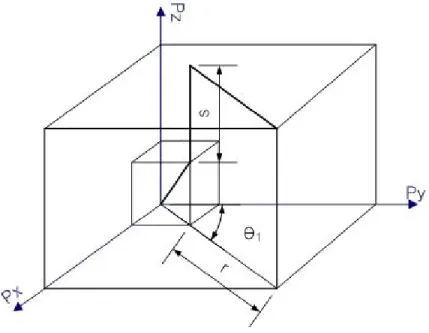
2.3 중력 보상기의 최적화 적용 연구
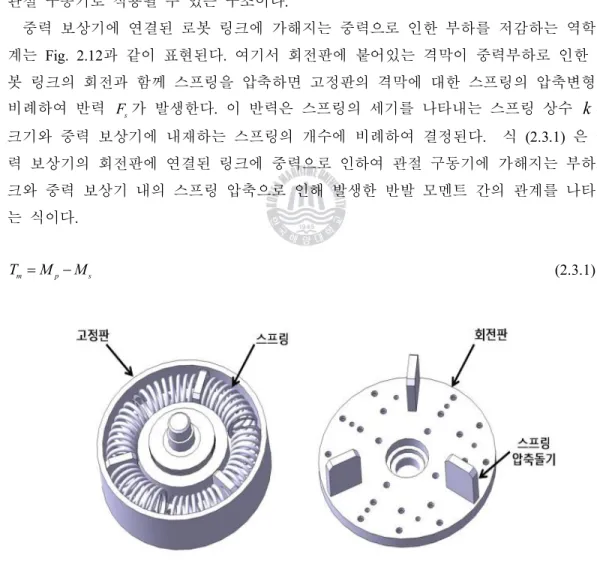
2.3.1 중력 보상기의 구조본 연구에서 제안하는 중력 보상기(Gravity Compensator)는 Fig. 2.10와 같이 고정판, 회
전판, 스프링 압축돌기, 및 압축스프링 등으로 구성된다. 압축스프링의 압축변위에 따른 복원력을 이용하여 구동 시 요구되는 부하토크를 감쇄시켜 줌으로써 구동기에서 발생 시켜야 할 구동토크를 줄여주는 효과를 얻을 수 있게 된다. 결과적으로 압축스프링의 복원력으로 발생되는 보상력 만큼 관절 구동기의 성능이 향상된다. 중력 보상기는 모듈로 구성되어 Fig. 2.11과 같이 모터나 감속기에 직결하여 로봇의 관절 구동기로 적용될 수 있는 구조이다. 중력 보상기에 연결된 로봇 링크에 가해지는 중력으로 인한 부하를 저감하는 역학관 계는 Fig. 2.12과 같이 표현된다. 여기서 회전판에 붙어있는 격막이 중력부하로 인한 로 봇 링크의 회전과 함께 스프링을 압축하면 고정판의 격막에 대한 스프링의 압축변형에 비례하여 반력 F 가 발생한다. 이 반력은 스프링의 세기를 나타내는 스프링 상수 s
k
의 크기와 중력 보상기에 내재하는 스프링의 개수에 비례하여 결정된다. 식 (2.3.1) 은 중 력 보상기의 회전판에 연결된 링크에 중력으로 인하여 관절 구동기에 가해지는 부하토 크와 중력 보상기 내의 스프링 압축으로 인해 발생한 반발 모멘트 간의 관계를 나타내 는 식이다. m p s T =M -M (2.3.1)Fig. 2.11 Joint actuator with gravity compensator
Fig. 2.12 Structure of gravity compensator
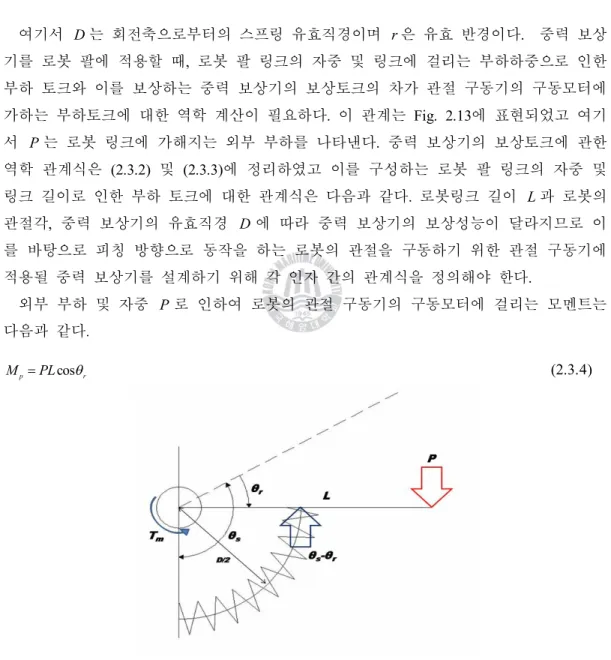
여기서 T 는 구동모터의 출력토크이고 m M 는p 외부 부하로 인하여 로봇의 관절 구동 기의 구동모터에 걸리는 모멘트이고 M 는 스프링의 압축으로 인해 발생한 반발 모멘s 트로 이의 차는 관절 구동기의 구동모터에 대한 부하로 표현된다. 식 (2.3.1)을 구체적 으로 살펴보면 다음과 같다. Fig. 2.12에서 중력부하로 인하여 로봇 링크가 회전하여 스프링을 압축하면 스프링을 압축한 각도의 양 q qs- 에 비례하여 스프링의 반발력 r F 가 발생한다. 여기서 s q 는 s 고정판의 원주 홈을 따라 설치한 압축스프링의 회전각의 총 길이를 나타낸다. 스프링의 반발력 F 를 계산하기 위한 관계식은 다음과 같다. s
(
)
s s r F =nK q q- (2.3.2) 여기서n
은 압축 스프링의 개수이다, 이 스프링 반발력은 다음의 모멘트 식으로 중 력으로 인한 부하토크를 감소시키는 역할을 한다. 2 / 2 ( ) s s s r M =DF =nkr q q- (2.3.3) 여기서 D 는 회전축으로부터의 스프링 유효직경이며 r 은 유효 반경이다. 중력 보상 기를 로봇 팔에 적용할 때, 로봇 팔 링크의 자중 및 링크에 걸리는 부하하중으로 인한 부하 토크와 이를 보상하는 중력 보상기의 보상토크의 차가 관절 구동기의 구동모터에 가하는 부하토크에 대한 역학 계산이 필요하다. 이 관계는 Fig. 2.13에 표현되었고 여기 서 P 는 로봇 링크에 가해지는 외부 부하를 나타낸다. 중력 보상기의 보상토크에 관한 역학 관계식은 (2.3.2) 및 (2.3.3)에 정리하였고 이를 구성하는 로봇 팔 링크의 자중 및 링크 길이로 인한 부하 토크에 대한 관계식은 다음과 같다. 로봇링크 길이 L 과 로봇의 관절각, 중력 보상기의 유효직경 D 에 따라 중력 보상기의 보상성능이 달라지므로 이 를 바탕으로 피칭 방향으로 동작을 하는 로봇의 관절을 구동하기 위한 관절 구동기에 적용될 중력 보상기를 설계하기 위해 각 인자 간의 관계식을 정의해야 한다. 외부 부하 및 자중 P 로 인하여 로봇의 관절 구동기의 구동모터에 걸리는 모멘트는 다음과 같다. cos p r M =PL q (2.3.4)2.3.2 각 축의 모터 선정 및 중력보상기의 성능 시뮬레이션 설계된 도면의 자료를 활용하여 2.1절의 계산식들에 대한 파라미터를 Table 2과 같이 추출하고, Table 3에서 그에 대한 계산을 수행하여 각각의 액추에이터 및 감속비를 선정 하고, 중력보상기가 적용된 1~2번 축에 대한 시뮬레이션을 수행하였다. 각 링크의 관성력에 의한 토크를 구하기 앞서 다음과 같은 가정을 한다. ① 각 축의 회전 변위는 30°로 한다. ② 최대 변위 q 만큼 회전하는데 걸리는 회전시간은 0.5 s i ③ 가감속 시간은 0.15 s ④ 회전축 마찰저항토크(Tf)는 0.5 N・m 여기서 액추에이터의 각속도는 / 6 1.496 / c t a rad s t t p w = = - (2.3.5) 각 가속도는 2 9.973 / c i a rad s t w a = = (2.3.6) 가 된다.
Table 2 Parameter of each axis
1 m m 2 m 3 m 4 m 5 m 6 m 7 m 8 9.321kg 6.622kg 5.88kg 4.1kg 2.1kg 0.643kg 0.427kg 3.25kg 1 o r r i1 r o2 r i2 r o3 r i3 a L b L 117mm 97.3mm 162mm 154.4mm 63mm 40.9mm 210mm 210mm L m l 3 l 4 l 5 l 6 l 7 l 8 25kg 491.5mm 125mm 238mm 238mm 125mm 186.59mm
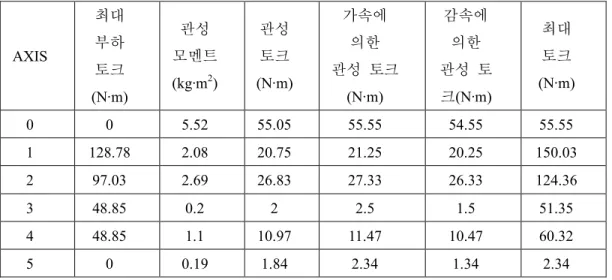
Table 3 Parameter of each axis about maximum torque and moment of inertia AXIS 최대 부하 토크 (N∙m) 관성 모멘트 (kg∙m2) 관성 토크 (N∙m) 가속에 의한 관성 토크 (N∙m) 감속에 의한 관성 토 크(N∙m) 최대 토크 (N∙m) 0 0 5.52 55.05 55.55 54.55 55.55 1 128.78 2.08 20.75 21.25 20.25 150.03 2 97.03 2.69 26.83 27.33 26.33 124.36 3 48.85 0.2 2 2.5 1.5 51.35 4 48.85 1.1 10.97 11.47 10.47 60.32 5 0 0.19 1.84 2.34 1.34 2.34
Table 4 Specification about selected motor of each axis
Axis 모터 감속비 정격 토크 0 HC-MF23B(200W) 30 8000 8000 0.64 170.67 30 N m ´ = × 1 HC-MF23B 20 4800 4800 0.64 153.6 20 N m ´ = × 2 HC-MF23B 22 5120 5120 0.64 148.95 22 N m ´ = × 3 HC-KF13G1(100W) 9 4400 4400 0.32 156.4 9 N m ´ = × 4 HC-MF23B 22 2400 2400 0.64 69.82 22 N m ´ = × 5 HC-MF13G1 1 100 0.32 100 32N m´ = × Table 4는 역학계산 결과를 기반으로 각 축의 모터를 선정한 것이다. 1번 축과 2번 축 의 경우 Fig. 2.14의 4절 링크 구조를 적용한 구조로 Table 3에서 가장 큰 토크를 필요로 하는 부분이다. 본 연구에서는 이 2개의 축에 대해 중력보상기 구조를 적용하여 로봇 이 더 큰 부하를 이송할 수 있도록 하였다.
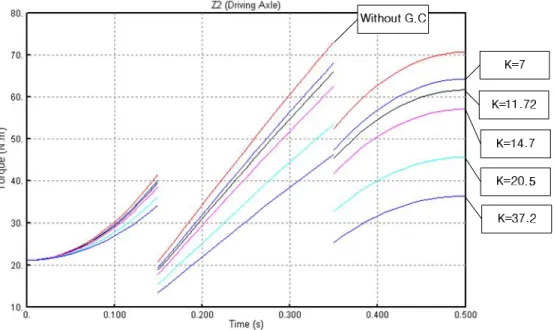
하와 관성 토크를 적용하여 회전각에 따른 중력보상기의 성능을 시뮬레이션하였다. Fig.2.15 은 1번 링크가 지면에 수직인 상태를 0°로 하여 30°가 될때까지 링에 액추에 이터에 작용하는 부하의 변화와 중력보상기의 작용에 의한 토크 저감 효과를 보여준다. 여기서 그래프의 패러미터 K 는 스프링 상수(N/mm)를 나타낸다. 스프링 상수가 커질수 록 보상력이 크게 작용하여 부하 토크 저감 성능이 개선되는 것을 알 수 있다. 적용된 스프링 상수가 커지면 보상력이 커지는 장점이 있지만 반대로 압축각에 제한 이 커져서 구동부의 회전각에 대한 제한이 커지는 단점이 있다. Fig.2.16은 2번 링크가 지면에 수평한 상태를 0°로 하고, 중력보상기의 스프링이 30° 압축된 상태에서 링크의 구동에 따른 부하 토크와 저감 효과를 나타내었다. Fig. 2.15과 Fig. 2.16의 시뮬레이션 결과에서 30°의 압축각에서 스프링 상수에 따라 6.5~34.36 N m× 의 토크 저감 효과를 갖는 것을 알 수 있다.
Fig. 2.15 Efficiency of gravity compensator at 1st link
제
3 장 6축 로봇의 기구학 해석
3.1 6축 로봇의 순기구학 해석
구조물의 안정적인 구동을 위해서는 링크의 관절 변수에 대한 기구학 (kinematics) 해 석이 필요하다. 본 연구에서는 설계된 6축 로봇을 바탕으로 관절 링크에 대한 기구학 적 해석을 수행하였다. 로봇이 지면에 고정되는 0축을 기준으로 하여 Denavit-Hartenberg 규약을 이용하여 Fig. 3.1과 같은 좌표계를 설정하였다. 1q
2q
4q
q
5 3q
6q
1a
4a
a
5 3a
Table 5 Parameter of D-H coordinate of 6-axis robot i a ai qi di 1 90˚ a1 90 +q1 o 1 d 2 0˚ a2 90 +q2 o 0 3 90˚ a3 q3 0 4 -90˚ 0 q4 d4 5 90˚ 0 q5 0 6 0° 0 q6 d6 D-H 규약을 이용하여 좌표를 설정하게 되면 Fig. 3.1에서와 같이 ai, , ,a qi i di에 해당 하는 각각의 관절링크의 패러미터를 바탕으로 순 기구학 해석을 행하게 된다. 각각 의 패러미터를 Table 5에서 정리하였다. 다음은 각각의 관절 링크를 4개의 기본 변환 행렬의 곱을 이용한 동차변환 행렬 i A 로 표현하고, 전체 변환 행렬 T 를 구한 결과를 나타낸 것이다. , , , ,
cos -sin cos sin sin cos
sin cos cos -cos sin sin
0 sin cos 0 0 0 1 i i i i i z z d x a x i i i i i i i i i i i i i i i i i
A Rot Trans Trans Rot
a a d q a q q a q a q q q a q a q a a = ´ ´ ´ ´ ´ ´ é ù ê ´ ´ ´ ú ê ú = ê ú ê ú ë û (3.1.1) 각각의 패러미터에 대한 전체 변환 행렬을 구하면 다음과 같다. 11 12 13 21 22 23 6 0 1 2 3 4 5 6 31 32 33
0
0
0
1
x y zr
r
r
d
r
r
r
d
A
A A A A A A
r
r
r
d
é
ù
ê
ú
ê
ú
=
=
ê
ú
ê
ú
ë
û
(3.1.2)11 6 1 5 23 5 1 4 1 4 23 6 1 4 1 4 23 21 6 1 5 23 5 1 4 1 4 23 6 1 4 1 4 23 31 6 5 23 4 5 23 4 6 23 12 6 1 5 23 5 1 4 1 4 23 6 1 4 1 4 23 22 6 1 5 23 5 1
{
(
)}
(
)
{
(
)}
(
)
(
)
{
(
)}
(
)
{
(
r
c s s c
c c s s c s
s c c s s s
r
c c s c
c s s c c s
s s c c s s
r
c s s
c c c
s s c
r
s s s c
c c s s c s
c c c s s s
r
s c s c
c s s
=
+
+
+
-= -
-
-
+
+
= -
-
-= -
+
+
+
-=
-
4 1 4 23 6 1 4 1 4 23 32 6 5 23 4 5 23 4 6 23 13 5 1 4 1 4 23 1 5 23 23 5 1 4 1 4 23 1 5 23 33 4 5 23 5 23)}
(
)
(
)
(
)
(
)
c c s
c s c c s s
r
s s s
c c c
s c c
r
s c s s c s
s c c
r
s s s c c s
c c c
r
c s c
c s
-
+
+
=
-
-=
+
-=
-
+
=
+
(3.1.3) 6 5 1 4 1 4 23 1 5 23 4 1 23 3 1 23 2 1 2 1 1 6 5 1 4 1 4 23 1 5 23 4 1 23 3 1 23 2 1 2 1 1 6 4 5 23 5 23 4 23 3 23 2 2 1 { ( ) } { ( ) } ( ) x y z d d s cs sc s sc c d sc a s s a s s as d d s s s cc s cc c d cc a c s a c s ac d d c s c c s d s a c a c d = + - - + + -= - + + - - + = + + + + + (3.1.4) 전체 동차 변환식을 다른 형태로 표현하면 다음과 같다. 6 0 0 0 0 1 x x x x y y y y z z z z n s a d n s a d A T n s a d é ù ê ú ê ú = = ê ú ê ú ë û (3.1.5) 여기서 , ,n s a 는 각각 o x y z 좌표계에 대한 0 0 0 0 o x o y o z 축의 방향을 나타내는 벡6 6, 6 6, 6 6 터이고, d는 원점 o 에서 0 o 까지의 벡터를 6 o x y z0 0 0 0 좌표계로 표현한 것이다.3.2 6축 로봇의 역기구학 해석
본 연구에 적용한 6축 로봇의 경우 구형 손목의 형태를 가진 형태로 일반적으로 이 러한 구조의 역기구학 해를 구하기 위하여 역위치 기구학 문제와 역방향 기구학 문제 로 디커플 시키는 방법을 사용한다. 즉 기구의 손목 축들의 만남의 위치인 손목 중심 을 찾고 손목의 방향을 구하는 2개의 간단한 문제로 나눌 수 있다. 로봇의 말단장치의 위치가 d 점에서 주어진 방향 R=( )rij 를 가질 필요충분조건은 다 음과 같다. 6 c p = -d d Rk (3.2.1) 여기서 Rk는 순기구학 해의 동차변환에서 z 축 방향의 회전변환 행렬을 의미한다. 말단 장치의 위치 벡터 d 의 성분이 d d d 이고x, ,y z , 손목 중심 p 의 성분이 c p p px, y, z 이면, 각각의 손목중심의 성분은 다음과 같다. 6 13 6 23 6 33 x x y y z z p d d r p d d r p d d r -é ù -é ù ê ú ê= - ú ê ú ê ú ê ú ê - ú ë û ë û (3.2.2) 여기서, r r r 와 13, ,23 33 d d d 는x, ,y z 말단 위치에 의해 주어진 좌표의 값이다. 주어진 손목 중심의 좌표를 이용하여 우선 기하학적인 방법을 이용하여 q q q 의 1, ,2 3 값을 다음과 같이 구할 수 있다. 먼저 Fig. 3.2를 통하여 q 의 해를 구하고, Fig. 3.3의 관계와 제2 코사인 법칙을 응용하1 여 q2~q 의 기하학적 해를 구하였다. 3Fig. 3.2 Digram of robot about
q
11 Atan( ,p py x)
q = - (3.2.3)
2 Atan( , )s r Atan(a2 nsin( 3 ), cos(n 3 )) q = - + q a+ q a+ (3.2.4) 2 3 Atan( 1 D D, ) q = - + (3.2.5) a 여기서, 2 1 1 1 1 ( sin ) cos 2, x y z 1 r = p +a q +(p -a q ) s = p - d (3.2.6) 2 2 2 2 2 2 3 4 2 2 2 3 4 2 r s a a d D a a d + - - -= + (3.2.7) 2 2 3 3 4 2 2 3 4 , a n a d a d a = - = + + (3.2.8) 3 q 의 경우 4절 링크 구조에서 q 의 각 변위에 영향을 받으므로 실제로 제어에 사용2 해야 할 회전각 q 은 다음과 같다. 3r 3r 2 3 q =q q+ (3.2.9) 나머지 관절 링크의 회전 변수는
z
축이 일치하는 구형 손목의 형태이며, 다음의 Euler 각도와 같은 형태를 가진다. , , , 0 0 0 0 0 1 0 0 0 0 1 0 0 0 1 z y z c s c s c s R R R s c s c s c f f q y y f q y f f y y q q - -é ù é ù é ù ê ú ê ú ê ú = ê ú ê ú ê ú ê ú ê- ú ê ú ë û ë û ë û 11 12 13 21 22 23 31 32 33 c c c s s c c s s c c s u u u s c c c s s c s c c s s u u u s c s s c u u u f q y f y f q y f y f q f q y f y f q y f y f q q y q y q é - - - ù é ù ê ú ê ú =ê + - + ú ê= ú ê - ú êë úû ë û (3.2.9) 각각의 q f y 를 구해보면 다음과 같다. , , 2 33 33 tan( , 1 ) A u u q= ± - (3.2.10)13 23 tan( , ) A u u f = (3.2.11) 31 32 tan( , ) A u u y = - (3.2.12) Euler 각도를 이용하기 위하여 다음의 관계를 이용한다. 6 3 6 0 0 3 R R= =R R× (3.2.13) 6 3 3 ( )0 T R = R × (3.2.14) R 식 (3.1.3)의 순 기구학 해석에서 3 0 R 에 해당하는 행렬식을 다음과 같이 쉽게 구할 수 있다. 1 23 1 1 23 1 23 1 23 23 3 3 0 1 23 1 1 23 0 1 1 23 23 1 23 1 23 23 , ( ) 0 0 T s s c s c s s c s c R c s s c c R c s c s s c c c s - -é ù é ù ê ú ê ú = -ê ú =ê ú ê ú ê- ú ë û ë û (3.2.15) 따라서 6 3 R 은 다음과 같다. 4 5 6 4 6 4 5 6 4 6 4 5 1 23 1 23 23 11 12 13 6 3 4 5 6 4 6 4 5 6 4 6 4 5 1 1 21 22 23 5 6 5 6 5 1 23 1 23 23 31 32 33 0 c c c s s c c s s c c s s s c s c r r r R s c c c s s c s c c s s c s r r r s c s s c s c c c s r r r - - - -é ù é ù é ù ê ú ê ú ê ú =ê + - + ú ê= ú ê ú ê - ú ê- ú ê ú ë û ë û ë û 11 1 23 21 1 23 31 23 12 1 23 22 1 23 32 23 13 1 23 23 1 23 33 23 11 1 21 1 12 1 22 1 13 1 23 1 11 1 23 21 1 23 31 23 12 1 23 22 1 23 32 23 13 1 23 23 1 23 33 23 r s s r c s r c r s s r c s r c r s s r c s r c r c r s r c r s r c r s r s c r c c r s r s c r c c r s r s c r c c r s - + - + - + é ù ê ú =ê + + + ú ê- + + - + + - + + ú ë û (3.2.16) 이를 Euler의 경우와 동일하게 적용하면 q q q 는 다음과 같다. 4, ,5 6 4 Atan(r s s13 1 23 r c s23 1 23 r c r c33 23,13 1 r s23 1) q = - + + (3.2.17) 2 5 Atan( r s c13 1 23 r c c23 1 23 r s33 23, 1 { r s c13 1 23 r c c23 1 23 r s33 23} ) q = - + + ± - - + + (3.2.18) 6 Atan( { r s c11 1 23 r c c21 1 23 r s31 23}, r s c12 1 23 r c c22 1 23 r s32 23) q = - - + + - + + (3.2.19)
3.3 6축 로봇의 기구학 시뮬레이션
기구학 및 역기구학 해석을 검증하기 위하여 매트랩을 이용한 시뮬레이션을 수행하 였다. 액추에이터 0번을 1회전 시켰을 경우 생성될 좌표의 위치 및 방향 벡터를 설정 하고, 각각의 벡터를 역기구학의 3.2절에서 수행한 역기구학 수식에 입력하여 계산한 각 축의 회전 변위를 3.1절의 순기구학 해석에 적용하여 Fig. 3.4와 같은 원 경로를 갖 는 말단 좌표가 생성되는 것을 통해 역기구학 및 순기구학 수식을 검증할 수 있었다. 그래프에서 ‘o’ 으로 표시한 부분은 직접적인 구동에 관여하는 회전 축을 나타내며, ‘*’ 으로 표시된 부분은 로봇의 말단 좌표를 나타낸다. (0, 533, 501), (-533, 0, 501), (0, -533, 501), (533, 0, 501)에 해당하는 좌표에 대하여 각각 (0, 534.9, 500.7), (-534.9, 3.276×10-14≒0, 500.7), (-6.551×10-14≒0, -534.9, 500.7), (534.9, -1.606×10-13≒0, 500.7) 의 좌표를 생성하는 것을 통해 0~0.35%의 계산에 의한 오차를 확인하였다. Fig. 3.4의 수식 검증에 사용한 매트랩 소스를 A.1에 수록하였다.3.4 6축 다관절 로봇의 속도 기구학 해석
로봇의 속도 기구학은 순기구학 해석을 이용한 자코비안(Jacobian)에 의해 결정된다. 이 자코비안은 로봇운동의 해석과 제어에 가장 중요한 양 중의 하나로, 자코비안은 로 봇의 제어에 있어서 부드러운 궤적을 생성하고, 특이 형상을 결정하고, 사람 같은 운동 의 실행에 있어서 필수적인 인자라 할 수 있고, 동역학 운동 방정식을 유도하고 말단장 치에서 관절로의 힘과 토크를 변환하는데 사용된다. 자코비안은 장치의 각속도 및 선속도 벡터를 나타내는 6 n´ ( n =축의 개수) 행렬로 표현할 수 있다. 0 v n J J Jw é ù = ê ú ë û (3.4.1) (3.4.1) 에서 J 와 Jv w는 각각 3 n´ 의 선속도와 각속도를 나타내는 행렬이다. 6축 로봇의 경우 회전관절만을 이용하여 구성하였으므로, 그에 대한 i 번째 열에 대 한 자코비안을 구하기 위한 공식은 식 (3.4.2)와 같다. 1 1 1 ( ) i n i i i z o o J z - -´ -é ù = ê ú ë û (3.4.2) 위의 식을 이용하여 6축 다관절 로봇의 자코비안 식을 표현하면 식 (3.4.3)과 같다. 0 1 0 1 0 ( ) ( ) z o o J q z ´ -é ù = ê ú ë û 0 2 0 1 2 1 2 0 1 ( ) ( ) ( ) z o o z o o J q z z ´ - ´ -é ù = ê ú ë û 0 3 0 1 3 1 2 3 2 3 0 1 2 ( ) ( ) ( ) ( ) z o o z o o z o o J q z z z ´ - ´ - ´ -é ù = ê ú ë û 0 4 0 1 4 1 2 4 2 3 4 3 4 0 1 2 3 ( ) ( ) ( ) ( ) ( ) z o o z o o z o o z o o J q z z z z ´ - ´ - ´ - ´ -é ù = ê ú ë û 0 5 0 1 5 1 2 5 2 3 5 3 4 5 4 5 0 1 2 3 4 ( ) ( ) ( ) ( ) ( ) ( ) z o o z o o z o o z o o z o o J q z z z z z ´ - ´ - ´ - ´ - ´ -é ù = ê ú ë û[
]
0 6 0 1 6 1 2 6 2 3 6 3 4 6 4 5 6 5 6 0 1 2 3 4 5 ( ) ( ) ( ) ( ) ( ) ( ) ( ) z o o z o o z o o z o o z o o z o o J q z z z z z z ´ - ´ - ´ - ´ - ´ - ´ -é ù = ê ú ë û = (3.4.3)자코비안 식을 계산하기 위한 패러미터 o0 ~o 는 다음과 같다. 6 0 0 0 0 o é ù ê ú = ê ú ê ú ë û , 1 1 1 1 1 1 a s o a c d -é ù ê ú = ê ú ê ú ë û , 2 1 2 1 1 2 2 1 2 1 1 2 2 1 a s s a s o a c s a c a c d -é ù ê ú = -ê + ú ê + ú ë û , 3 1 23 2 1 2 1 1 3 3 1 23 2 1 2 1 1 3 23 2 2 1 a s s a s s a s o a c s a c s a c a c a c d + -é ù ê ú = -ê - + ú ê + + ú ë û , 4 1 23 3 1 23 2 1 2 1 1 4 4 1 23 3 1 23 2 1 2 1 1 4 23 3 23 2 2 1 d s c a s s a s s a s o d c c a c s a c s a c d s a c a c d - + + -é ù ê ú =ê - - + ú ê + + + ú ë û , 4 1 23 3 1 23 2 1 2 1 1 5 4 1 23 3 1 23 2 1 2 1 1 4 23 3 23 2 2 1 d s c a s s a s s a s o d c c a c s a c s a c d s a c a c d - + + -é ù ê ú =ê - - + ú ê + + + ú ë û , 6 5 1 4 1 4 23 1 5 23 4 1 23 3 1 23 2 1 2 1 1 6 6 5 1 4 1 4 23 1 5 23 4 1 23 3 1 23 2 1 2 1 1 6 4 5 23 5 23 4 23 3 23 2 2 1 { ( ) } { ( ) } ( ) d s c s s c s s c c d s c a s s a s s a s o d s s s c c s c c c d c c a c s a c s a c d c s c c s d s a c a c d + - - + + -é ù ê ú =ê - + + - - + ú ê + + + + + ú ë û (3.4.4) 그리고, 패러미터 z0 ~z 는 다음과 같다. 5 0 0 0 1 z é ù ê ú = ê ú ê ú ë û , 1 1 1 0 c z s é ù ê ú = ê ú ê ú ë û , 1 2 1 0 c z s é ù ê ú = ê ú ê ú ë û , 1 23 3 1 23 23 s c z c c s -é ù ê ú = ê ú ê ú ë û , 1 4 23 1 4 4 1 4 23 1 4 4 23 s s s c c z c s s s c s c - + é ù ê ú =ê + ú ê - ú ë û , 5 1 4 1 4 23 1 5 23 5 5 1 4 1 4 23 1 5 23 4 5 23 5 23 ( ) ( ) s c s s c s s c c z s s s c c s c c c c c c c s + -é ù ê ú =ê - + ú ê + ú ë û (3.4.5) 식 (3.4.3)에 (3.4.4)와 (3.4.5)를 적용하여 계산한 결과를 A.2에 수록하였다.
3.5 6축 다관절 로봇의 동역학 해석
본 절에서는 6축 로봇의 동역학 해석을 위하여 Euler-Lagrangian 방법을 사용하였다. 일반적으로 사용되는 Euler-Lagrangian 방법은 시스템의 운동 에너지와 위치 에너지의 차이를 이용하여 물체의 형상에 대한 동역학 방정식을 간단히 구하는 방법으로 간단히 표현하면 식 (3.5.1) 과 같다. L K V= - (3.5.1) 여기서 K 는 시스템의 운동 에너지를, V 는 위치 에너지를 각각 나타낸다. 운동 에 너지 K 를 구하기 위하여 식 (3.5.2) 를 이용한다. 1 1 2 2 T T c c K = mv v + w wI (3.5.2) 식 (3.5.2) 를 자코비안 행렬을 이용할 수 있도록 나타내면 다음과 같다. 1 1 1 1 [ ] 2 1 1 [ ] ( ) 2 i i 2 i i n T T T T i vci vci ci i i i ci i n n T T i v i i i T v vci vci T T ci i i ci K q m J J J R I R J q q m K I K q q D q q K J J K J R R J w w w w w w = = = = å + = å + = å = = (3.5.3) 여기서 K 와vi Kwi는 각각 로봇의 선속도와 각속도를 구하기 위한 파라미터이며 각각 의 계산 결과를 A.3에 수록하였다. 여기서 I 는 각 링크의 관성 모멘트를 나타낸다. i 6축 로봇의 각 링크의 위치 에너지 V 는 질량과 중력 가속도와 질량 중심의 높이의 i 곱으로 나타낼 수 있다. ci i i m V =m gh (3.5.4) 여기서 질량 중심의 높이에 해당하는 값은 식 (3.3.4) 의 o1~o 행렬의 3행의 값에6 서 각 링크에 해당하는 말단 링크의 파라미터인 a 혹은 i d 의 값을 무게 중심에 해당i 하는 값인 a 와 ci d 로 치환한 것과 같다. ci1 1 mc c h =d , hmc2 =a cc2 2+ , d1 hmc3=a cc3 23+a c2 2+ , d1 4 4 23 3 23 2 2 1 mc c h =d s +a c +a c + , d hmc5=d s4 23+a c3 23+a c2 2+ , d1 6 6( 4 5 23 5 23) 4 23 3 23 2 2 1 mc c h =d c s c +c s +d s +a c +a c + (3.5.5) d 따라서 로봇의 총 위치 에너지는 다음과 같다. 1 ci n i m i V m gh = = å (3.5.6) 여기서 j j j L K V d L L dt q q t = -¶ - ¶ = ¶ ¶ (3.5.7) 의 관계가 있다. 또한 Euler-Lagrange 방정식은 다음과 같이 끌어낼 수 있다. , 1 ( ) ( ) 2 ij i j i j L K V= - = åd q q q V q- (3.5.8) 이므로 ( ) kj j j k L d q q q ¶ = å ¶ (3.5.9) 과 , ( ) ( ) ( ) kj j kj j j j k kj kj j i j j i j i d L d d q q d q q dt q dt d d q q q q q ¶ =å +å ¶ ¶ =å +å ¶ (3.5.10)
을 얻을 수 있다. 또한 , 1 2 ij i j i j k k k d L V q q q q q ¶ ¶ ¶ = å -¶ ¶ ¶ (3.5.11) 를 얻는다. 따라서 Euler-Lagrange 방정식을 , 1 ( ) { } 2 kj ij kj j i j k j i j i k k d d V d q q q q q q q t ¶ ¶ ¶ + - - = å å ¶ ¶ ¶ (3.5.12) 로 쓸 수 있다. 합의 순서를 바꾸고 대칭성을 이용하면 , , 1 { } { } 2 kj kj ki i j i j i j i j i i i d d d q q q q q q q ¶ ¶ ¶ = + å å ¶ ¶ ¶ (3.5.13) 이 됨을 보일 수 있다. 따라서 , , 1 1 { } { } 2 2 kj ij kj ki ij i j i j i j i j i k i j k d d d d d q q q q q q q q q ¶ ¶ ¶ ¶ ¶ - = + -å å ¶ ¶ ¶ ¶ ¶ (3.5.14) 이 된다. 항 1 { } 2 kj ki ij ijk i j k d d d c q q q ¶ ¶ ¶ = + -¶ ¶ ¶ (3.5.15) 는 (제 1 종의) Christoffel 기호라 한다. 고정된 k에 대해 cijk =cjik이므로, 이 계수들
을 계산하는 데 약 반 정도 노력을 줄일 수 있다. 마지막으로 k k V q f = ¶ ¶ (3.5.16) 를 정의하면 Euler-Lagrange 방정식을 다음과 같이 쓸 수 있다.
, ( ) ( ) ( ) , ( 1, , ) kj j ijk i j k k j d q q +i jc q q q +f q =t k= ××× n å å (3.5.17) 식 (3.5.3)과 (3.5.6)을 (3.5.17)에 대입하여 계산을 수행하기 위한 매트랩 소스를 A.4에 수록하였다.
3.6 매트랩 시뮬링크를 이용한 동역학 시뮬레이션
3.5절에서 수행한 계산 결과를 시뮬레이션 하기 위하여 Fig. 3.5의 시뮬 링크 소스를 구성하였다. 각각 30°에 해당하는 계단입력에 상응하는 토크 입력에 대하여 정상 상 태에 도달할 때까지의 입력에 해당하는 각 변위, 각속도, 각 가속도의 데이터를 식 (3.5.17)의 결과에 각각 대입하여 그 결과값에 해당하는 각 축의 토크 값을 산출하였다. Fig.3.6은 각각의 제어 입력을 피드백 제어하기 위해 구성한 PID제어기를 구성한 것 이다.Fig. 3.5 Simulink source for dynamics about 6-axis robot
Fig. 3.7은 각 축에 해당하는 좌표계와 링크의 질량 및 질량 중심, 회전축을 비롯한
각 축의 파라미터들을 대입하여 시뮬레이션에 필요한 로봇의 관절 정보를 입력하고, 각
각의 입력에 대한 센서 출력을 통해 시스템의 성능을 시뮬레이션 하기 위해 구성한 부
분이다.
각 축의 토크 입력에 대하여 센서 출력을 받고 그 결과를 식 (3.5.17)에 대입하기 위 하여 시뮬링크의 User-defined function에 해당하는 Embedded matlab function을 이용하여 계산 결과식을 적용한 블록을 생성하고, 센서 출력을 통한 각 변위, 각속도, 각 가속도 를 각각 적용하여 각 축의 토크 값을 계산할 수 있도록 구성하였다. Fig. 3.8~Fig. 3.19 는 각 축에 적용된 계단 입력에 대한 토크 계산 결과를 나타내었다. 토크 출력을 통해 중력 보상기를 적용한 액추에이터 1~2경우 각각 137 N m× 와 169 N m× 토크를 필요로 하는 것을 알 수 있으며, 앞서 수행한 중력 보상기의 보상력을 적용하였을 경우 최대 6.5~34.36 N m× 의 토크 저감 효과를 기대 할 수 있으므로 실제 중력 보상기를 적용한 6축 로봇의 경우, Fig. 3.11과 Fig. 3.13의 결과보다 큰 부하 토크를 낼 수 있다.
Fig. 3.9 에서 액추에이터 0번에 대하여 28.07 N m× 의 최대 부하 토크가 발생함을 알수
있다. 각 축의 토크 출력에서 나타나는 비선형 구간의 경우 시뮬레이션시 동기 구동에
따른 다른 축에 의한 외력과 가속, 감속시 발생하는 관성에 의한 토크에 의한 것이다.
Fig. 3.8 Step response of 0th axis
Fig. 3.11에서는 액추에이터 1번에 대하여 168.4 N m× 의 최대 부하 토크가 발생함을 알 수 있다.
Fig. 3.10 Step response of 1st axis
Fig. 3.13에서는 액추에이터 2번에 대하여 136.9 N m× 의 최대 부하 토크가 발생함을 알 수 있다.
Fig. 3.12 Step response of 2nd axis
Fig. 3.15에서는 액추에이터 3번에 대하여 31.76 N m× 의 최대 부하 토크가 발생함을 알 수 있다.
Fig. 3.14 Step response of 3rd axis
Fig. 3.17에서는 액추에이터 4번에 대하여 31.76 N m× 의 최대 부하 토크가 발생함을 알 수 있다.
Fig. 3.16 Step response of 4th axis
Fig. 3.19에서는 액추에이터 5번에 대하여 28 N m× 의 최대 부하 토크가 발생함을 알 수 있다.
Fig. 3.18 Step response of 5th axis
제
4 장 제어 시스템의 설계
4.1 전체 제어 시스템의 구성
6축 로봇을 구동하기 위해서 Fig. 4.1과 같은 PC 환경에서 제어가 가능한 제어 시스
템을 구성하였다. 시스템의 구성은 아직 엑스텍의 상용 모션 컨트롤러인 PCI-N804 보
드를 사용하고, 액추에이터로 선정한 미스비시 사의 AC서보 모터를 구동하기 위한 MELSERVO J2 super __A 드라이버를 적용하였다. PC 상의 GUI 에서 각 축의 제어 알 고리즘에 따른 명령을 전송하면 PCI-N804 보드에서 각각에 해당하는 PWM 펄스를 모 터 드라이버로 전송하고, 해당 모터 드라이버의 패러미터 설정에 따라 각 축의 모터를 구동하게 된다. 또한 모터에 부착된 엔코더 값을 통해 정밀한 제어가 가능하도록 피드 백이 가능하다. 각 축의 리미트 및 홈 서치 기능을 위해 포토 인터럽터를 사용할 수 있도록 회로를 구성하여 장착하였다.
4.2 모션 컨트롤러의 구성
4.2.1 모션 컨트롤러의 특징6축 로봇의 모션컨트롤러로 사용한 Fig. 4.2의 PCI-N804 보드는 가감속도 제어 및 위 치제어에 대하여 통합적인 알고리즘을 ASIC(Application Specific Integrated Circuit) 화 한 모터 제어전용 LSI칩인 CAMC-QI를 장착하여 PWM 제어 기반의 범용 AC 서보 드라이 버 및 스테핑 모터 드라이버의 제어가 가능하다. CAMC-QI 칩의 경우 개당 4축의 동 기 제어가 가능하며, PCI-N804보드의 경우 2개를 장착하여 총 8축에 모터에 대한 제어 가 가능하다. 칩 단위로 2~3축의 원호, 직선 보간 기능이 있으며, PCI 인터페이스를 사 용하여 데스크 탑에 장착하여 사용이 가능하다. 펄스 출력 방식으로는 1펄스 4가지, 2펄스 4가지, 2상 펄스 방식 2가지로 사용할 모터 드라이버의 사양에 맞게 설정할 수 있는 10가지 형태의 방식을 지원하여 다양한 종류 의 모터 드라이버를 구동할 수 있다. 그리고 대칭∙비대칭 사다리꼴, 대칭∙비대칭 S-curve등의 다양한 가 감속 모드를 선택 할 수 있어 시스템의 특성에 따라 선택하여 사용할 수 있다.
출력 펄스의 범위는 ~10.0000Mpps로 설정 값에 따라 최소 0.1% 오차 범위 내의 펄스 출력 정확도를 갖는다. 엔코더의 입력 사양은 ~4MHz(16Mcount/s)로 4 채배를 지원하는 28비트 엔코더 카운 터를 지원한다. 범용 입출력으로는 시스템의 안전 구동을 위하여 리미트 신호에 따른 감속정지와 급 정지를 지원하여 사용할 수 있으며, 홈 서치 기능이 가능하여 시스템의 형태에 따른 원 점을 검색할 수 있다. 또한 각 축당 10개의 입출력 환경을 제공하여 사용자의 필요에 따라 사용이 가능하다. 서보 모터용 입출력 신호를 주고 받기 위한 ALM(알람 신호), INPO(위치 결정 완료 신호), SVON(서보 온 신호), CLR(잔여 펄스 삭제 신호), ALMC(알람 제거 신호)를 제공 하여 시스템의 제어가 가능하다.
Fig. 4.3 Diagram of PCI-N804 board
Fig. 4. 3 에서는 모션 컨트롤러의 인터페이스 환경을 나타내었다. 각 축에 해당하는 제어 명령을 어드레스 버스와 데이터 버스를 통해 제어하고, 모션 제어기에서는 그에 따른 입출력을 총 4개의 외부 커넥터를 통해 주고 받을 수 있다. 외부 커넥터의 경우 각각 68핀으로 구성 되어 있으며 전용 단자대를 통해 제어 시스템의 구성이 가능하다.
4.2.2 T-68PR 단자대의 구성 Fig. 4.4는 PCI-N804 모션 컨트롤러의 전용 단자대인 T68-PR과 미스비시 사의 범용 AC 서보 모터 드라이버인 MR-J2S-xxA와의 배선도를 나타내었다. 하나의 단자대로 2개 의 드라이버를 사용할 수 있으며, 전용 케이블을 통해 해당하는 PCI-N804 보드의 외부 커넥터와 접속할 수 있다. 시스템의 안전성을 위하여 각각의 입출력은 포토 커플러를 이용하여 전원이 분리되어 있다.
Fig. 4.5 Construction of pulse by using line driver method
Fig. 4.4 의 배선도에서 미스비시 모터 드라이버의 PP, PG, NP, NG에 해당하는 핀의 경 우 Fig. 4.5와 같은 PWM 입력을 받아서 모터의 제어에 사용한다.
ECA, ECB, ECB는 각각 모터 엔코더의 A, B, Z 상의 펄스 입력을 받는데 사용되며, INP 의 경우 서보 시스템이 목표치에 도달하였을 경우 인 포지션을 체크하는데 사용된 다. 범용 입력인 IN2의 경우 전자 브레이크 부착형 모터를 사용할 경우에는 전자브레 이크 인터로크 신호 입력을 받는 용도이며, 일반적으로는 서보 모터의 구동 준비 완료 상태를 확인하기 위하여 사용한다. +LMT, -LMT는 각각 시스템의 cw/ccw방향의 회전에 대한 리미트 스위칭 동작에 사용 되며, ORG는 시스템의 원점 검출에 사용 되는 입력이다. EMGN의 경우 시스템의 오 동작 발생시 긴급정지를 위한 스위치를 사용하기 위한 것이다. SVON은 각 축의 서보 온 동작 명령을 출력하는데 사용되며, 모터 드라이버의 세팅 에 따라 액티브 레벨을 설정하여 사용한다. ALMC는 시스템의 알람 발생시 잔여 펄스 소거 및 정지 기능을 제공한다.
Fig. 4.6 Construction of control system about motion controller
Fig. 4.6 의 경우 모션 컨트롤러의 입력을 받는 T68-PR 단자대와 모터 드라이버용 단
자대 간의 결선을 위한 것으로, 각각의 단자대의 입력을 모터 드라이버로 분배하여 효
율적인 제어 시스템을 구성할 수 있도록 하였다. 터미널 블록의 전원 및 계전기 구동