DOI http://dx.doi.org/10.9725/kstle.2014.30.2.77
피봇 강성을 고려한 틸팅 패드 저널 베어링의 해석
최태규1·김태호2†
1
국민대학교 대학원 기계설계학과,
2국민대학교 기계시스템공학부
Analysis of Tilting Pad Journal Bearings Considering Pivot Stiffness
Tae Gyu Choi
1and Tae Ho Kim
2†1
Graduate School, Dept. of Mechanics and Design, Kookmin University
2
School of Mechanical Systems Engineering, Kookmin University
(Received January 12, 2014 ; Revised February 8, 2014 ; Accepted February 9, 2014)
Abstract − This study set out to predict the load capacity and rotordynamic coefficients of tilting-pad journal bearings, taking the pivot stiffness into account. The analysis uses rocker-back (cylindrical) and ball in socket (spherical) pivot models, both of which are based on Hertzian contact stress theory. The models ascertain the non-linear elastic deformation of the pivots according to the applied load, pivot geometry, and material prop- erties. At present, the Reynolds equation for an isothermal, isoviscous, and incompressible fluid is used to cal- culate the film pressure by using the finite-element method, after which the Newton–Raphson method is used to simultaneously find the journal center location, pad angles, and pivot deflections. The bearing analysis, exclud- ing the pivot models, is validated using predictions those are readily available in the literature. As the rotor speed increases, the predicted journal eccentricity and damping coefficients decrease, but the stiffness coefficients increase, as expected. Most importantly, the implementation of the pivot models increases the journal eccentricity but significantly decreases the stiffness and damping coefficients of the tilting-pad journal bearings.
Keywords − tilting pad journal bearing (틸팅 패드 저널 베어링), pivot stiffness (피봇 강성), load capacity ( 하중지지능력), stiffness (강성), damping (감쇠)
Nomenclature
c
bBearing clearance (m) c
pPad clearance (m)
C
i,j=X,YBearing damping coefficients (N-s/m) D Journal diameter (m)
D
hPivot housing diameter (m) D
PPivot diameter (m) e Journal eccentricity (m)
E
hPivot housing modulus of elasticity (N/m
2) E
PPivot modulus of elasticity (N/m
2)
F
PoLoad on pivot (N) h Oil film thickness (m)
K
i,j=X,YBearing stiffness coefficients (N/m) L Bearing axial length (m)
L
RRocker back length (m) N Number of pads (−) p Oil film pressure (Pa) p
0Ambient pressure (Pa) R
JBearing journal radius (m) R
pRadius of pad curvature (m) R
bRadius of bearing curvature (m) S Sommerfeld number ( −) t Time (sec)
†
Corresponding author : [email protected]
Tel: +82-2-912-4723, Fax: +82-2-910-4839
θ
sStart of pad angle (deg) θ
padPad angle (deg) φ
p, θ
pPivot angle (deg) ζ Pivot deflection (m) ρ Oil density (kg/m
3)
Ω Rotor angular velocity (rad/s)
1. 서 론
일반산업 및 구동/발전설비의 고속 회전체 시스템에 적용되는 틸팅 패드 저널 베어링 설계 기술은 1960년 대 이후 미국을 중심으로 연구개발이 지속되고 있다.
최근에는 보편적 기술의 발전으로 인해 다단 압축기, 펌프, 및 가스터빈 등의 고속회전기기에 적용되고 있 으며, 기술 향상을 위한 응용 연구가 활발하게 진행되 고 있다. 틸팅 패드 저널 베어링은 구름 베어링에 비 해서 고속 구동과 내구성이 우수할 뿐만 아니라, 다른 유체 윤활 저널 베어링에 비해서 연성 강성 계수 (Cross-Coupled Stiffness Coefficients)가 없거나 매우 작아 고속에서도 안정적으로 저널의 회전이 가능하다.
그러나, 아직까지 베어링 냉각 설계 및 패드를 지지하 는 피봇의 설계 기술에 있어서는 모델링 및 해석의 어 려움이 존재한다.
Kim과 Kim[1]은 패드 선단압력이 틸팅 패드 저널 베어링의 정적 및 동적 특성에 미치는 해석적 연구를 진행하였다. 유막 압력해석을 위해 패드 선단에서의 압 력 경계조건으로 입구압력을 사용해 해석하였으며 입 구압력이 틸팅 패드 저널 베어링의 강성에 영향을 미 치는 것을 밝혔다. Ha와 Kim[2]은 온도 및 난류효과 를 고려한 동특성 해석을 통해 온도 및 난류의 영향이 강성과 감쇠계수에 영향을 미치는 것을 밝혔다.
Kim[3] 등은 난류, 온도, 선단압력을 고려하여 패드 수
와 Reedy[7]는 피봇의 형상에 따른 틸팅 패드 피봇의 강성 변화를 모델링 및 해석하였으며 이를 통해서 피 봇의 형상에 따른 동적 계수를 분석하였다. Nicholas와 Wygant[8]는 고하중에서 틸팅 패드 저널 베어링 피봇 과 강성의 관계를 통해 피봇에 따른 강성값과 그에 따 른 패드 내의 응력변화를 유한요소법을 통해서 분석하 였다.
San Andres[9] 는 하이브리드 연성 피봇(Flexure pivot) 틸팅 패드 베어링에 대한 모델링 및 해석을 수행하면 서 연성 피봇(Flexure pivot) 베어링의 우수성을 해석 및 실험적으로 검증하였다. Childs와 Harris[10]는 틸팅 패드 저널 베어링을 해석함에 있어 임의의 피봇 강성 을 고려한 동적 계수 해석 결과를 실험 결과와 비교하 였다. 해석과 실험결과를 비교하여 피봇 강성을 고려 한 해석이 피봇 강성을 고려하지 않은 해석보다 실험 결과와 더 잘 일치함을 보였다.
이처럼 국내외의 틸팅 패드 저널 베어링에 대한 다 양한 연구가 진행 되어왔지만 피봇을 고려한 틸팅 패 드 저널 베어링의 피봇 설계에 따른 베어링의 정·동 특성 해석은 많은 연구가 진행되지 않았다. 따라서, 본 연구에서는 틸팅 패드 저널 베어링의 정·동특성 예 측을 통한 설계 기술을 개선하기 위해 피봇 형상 및 하중조건에 따른 피봇 강성을 예측하고 피봇 모델이 베어링의 운전 특성에 미치는 영향을 해석적으로 분석 하고자 한다.
2. 해석 모델
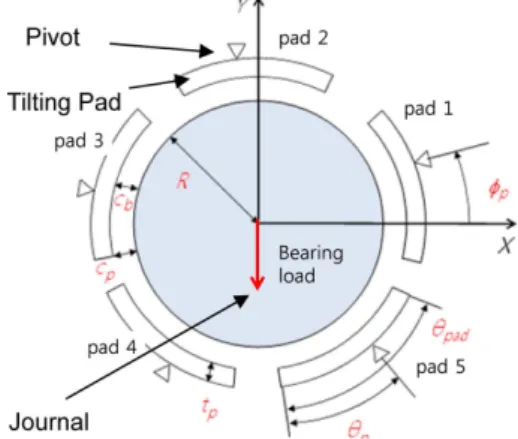
Fig. 1은 틸팅 패드 저널 베어링의 해석 모델을 보
여준다. 틸팅 패드 저널 베어링은 피봇(Pivot)에 지지
된 틸팅 패드(Tilting pad)가 저널(Journal)을 지지하
는 베어링 면을 형성하는 구조를 갖는다. 베어링의 설
계를 위한 변수는 저널의 반경(R), 패드의 개수, 패 드의 원주길이(θ
pad), 베어링 원주 좌표계 원점 및 패 드 선단으로부터의 피봇의 거리(φ
p, θ
p), 베어링 간극 (c
b), 기계적 예압 또는 프리로드(c
p-c
b), 피봇의 형상 등이다. 저널과 패드 사이에는 윤활 오일이 공급되며, 저널이 회전함에 따라 유체 동압(Hydrodynamic pressure)이 발생하여 하중을 지지한다. Fig. 2와 Fig.
3은 각각 틸팅 패드 지지를 위해 일반적으로 사용되 는 볼 소켓형(Ball-and-socket or spherical) 피봇과 락커 백형(Rocker-back or cylindrical) 피봇을 보여 준다.
피봇은 패드를 지지하면서 피봇점을 기준으로 패드
의 틸팅 거동을 가능하게 한다. 베어링에 부과된 하중 이 좁은 피봇점에 집중되기 때문에 피봇은 상대적으로 큰 변형과 마모를 수반한다. 따라서, Kirk와 Reddy[7], 그리고 Nicholas와 Wygant[8]는 Roark의 Hertzian contact stress 이론[11]을 바탕으로 피봇의 강성 해석 모델을 제시하였다. 참고문헌[11]에 따르면 Hertz는 곡 률을 가지는 탄성 물체간의 접촉에서 하중에 따른 표 면 응력 및 변형량에 대한 수학적 이론을 확립 하였으 며, 이를 실험적으로 증명하였다. 해석 모델은 패드에 가해지는 하중이 피봇에 집중하중으로 작용하는 것을 가정하였다. 볼 소켓형 피봇은 패드 하단에 위치한 소 켓이 반구형의 피봇을 감싸는 형태로 점 접촉을 한다.
참고문헌[8]에 보고된 볼 소켓형 피봇의 강성은 식 (1) 과 같다.
(1)
여기서, C
1과 C
2는 각각 아래와 같다.
락커 백형 피봇의 경우 패드 하단면의 곡률반경과 하우징의 곡률반경의 차이로 인해 패드는 하우징과 축 방향으로 선 접촉을 한다. 하중으로 인해 피봇이 변형 될 때 볼 소켓형 피봇에 비해 넓은 접촉 면적을 갖기 때문에 고하중용으로 사용이 가능하다. 참고문헌[8]에 따르면 락커 백형 피봇의 강성은 식 (2)로 계산이 가 능하다.
K
P1.442 C
1F
PoC
22---
=
3C
1D
hD
PD
h– D
P---
= C
21 – ν
P2E
P--- 1 – ν
h2E
h--- +
= Fig. 1. Simplified model of typical tiling pad journal
bearing.
Fig. 2. Spherical (Ball and Socket) Pivot.
Fig. 3. Cylindrical (Rocker Back) Pivot.
(2)
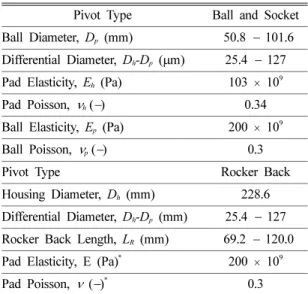
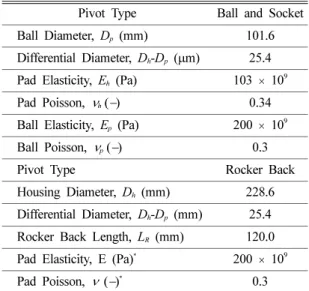
Table 1 은 볼 소켓형 피봇 및 락커 백형 피봇의 강 성 해석을 위한 모델[8]의 주요 치수 및 기호를 보여 준다. 볼 소캣형 피봇의 경우, 피봇과 패드의 재료는 각각 강철(Steel)과 청동(Bronze)이며, 락커 백형 피봇 의 경우 피봇과 패드의 재료는 모두 강철(Steel)이다.
Fig. 4 와 Fig. 5는 각각 볼 소켓형 피봇 및 락커 백형 피봇의 강성 해석 결과를 보여준다. Fig. 4에서 볼 소켓형 피봇은 볼의 직경(D
p) 이 커짐에 따라, 그리 고 소켓과 볼의 곡률직경 차이(D
h-D
p) 가 감소함에 따 라 피봇의 강성이 비선형적으로 증가함을 알 수 있다.
또한, 하중이 증가함에 따라 피봇 강성이 비선형적으 로 증가하는데 저하중 영역에서 고하중 영역보다 증가 량이 큰 것을 알 수 있다. Fig. 5에서 락커 백형 피
K
PπEL
R2 1 ( – ν
2) 2
3 --- ln D (
h– D
P)4EL
R2.15
2F
Po--- +
---
= Differential Diameter, D
h-D
p(mm) 25.4 − 127
Rocker Back Length, L
R(mm) 69.2 − 120.0 Pad Elasticity, E (Pa)
*200 × 10
9Pad Poisson, ν (−)
*0.3
*Note: Same materials for the rocker back pivot and pad
Fig. 4. (a) Pivot stiffness vs. differential diameter and (b) pivot stiffness vs. static load for increasing ball diameters. Ball and socket pivot.
Fig. 5. (a) Pivot stiffness vs. differential diameter and
(b) pivot stiffness vs. static load for increasing rocker
back lengths. Rocker back pivot.
봇의 경우 락커 백의 길이(L
R) 가 증가함에 따라, 그리 고 락커 백과 하우징의 곡률직경 차이(D
h-D
p) 가 작아 짐에 따라 피봇의 강성이 비선형적으로 증가한다. 또 한, 하중이 증가함에 따라 피봇 강성이 비선형적으로 증가한다. 그러나, 너무 극단적인 피봇의 강성증대는 피봇의 회전운동을 방해하며 마모를 증대시킬 우려가 있다.
3. 해석 방법
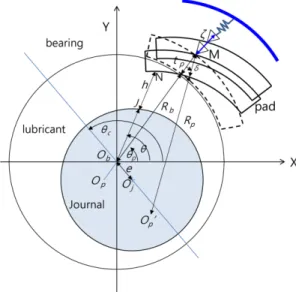
Fig. 6 은 피봇의 변형을 고려한 틸팅 패드 저널 베 어링의 패드 거동을 보여준다. R
p, R
b,R
J,t
p, e, h, θ
c, θ
p, θ는 각각 패드의 곡률 반경, 베어링 반경, 저널 반경, 패드 두께, 저널 편심량, 윤활유막 두께, 저널 자세각, 원주 좌표계 원점으로부터의 피봇의 거리, 그 리고 윤활두께 해석 각도를 나타낸다. δ와 ζ는 각각 패드의 회전(틸팅)각도와 피봇의 반경방향 변위를 보 여준다. 식 (3)은 참고문헌[12, 13]의 수식을 바탕으로 유도한 피봇의 변형 (ζ)을 고려한 틸팅 패드 저널 베 어링의 윤활유막 두께 계산식이다.
(3)
틸팅 패드 저널 베어링의 상온 성능 예측을 위해 식 (4) 와 같이 비압축성 유체를 위한 레이놀즈 방정식을
사용하였다.
(4)
p, R
J, t, h, ρ, µ, Ω는 각각 압력, 저널 반경, 시 간, 윤활유막 두께, 유체의 밀도, 유체의 점도, 그리고 회전각속도이다. x, z는 각각 원주방향 및 축방향 직교 좌표계를 나타낸다. 패드 표면 원주 방향 및 축 방향 의 끝단에서의 압력 경계조건은 주변압력(p
0) 과 같도록 하였다. 즉, p = p
0(θ = θ
s, θ
e,, z = L/2, -L/2). θ
s와 θ
e는 각각 패드의 시작 및 끝나는 지점의 각도이다. 패 드의 압력분포를 계산하기 위한 수치해석을 위해 유한 요소법을 사용하였으며 이는 참고문헌[14]을 참고하였 다. 패드의 윤활유막에 분포되는 유체동압은 피봇을 기 준으로 패드의 모멘트를 유발하며, 패드는 모멘트 평 형이 이루어지도록 회전(틸팅)하게된다. N = i번째 패 드에서의 모멘트 평형 계산식을 식 (5)에 나타내었다.
(5)
패드의 유체동압에 의해 피봇은 피봇의 강성(K
p) 에 따라 힘 평형이 이루어지도록 반경 방향으로 ζ만큼 변형하게 된다. 이 때 N = i번째 피봇에서의 힘 평형 계산식을 식 (6)에 나타내었다
(6)
식 (5), (6)에서 x
s= R
Jθ
s, 그리고 x
e= R
Jθ
e이다.
N
pad의 패드 개수를 갖는 틸팅 패드 저널 베어링의 유 체동압에 의한 수평 및 수직 방향 반력은 식 (7)로부 터 계산할 수 있다. 정적 평형이 이루어지면 수평 방향 의 반력 힘(F
X) 의 합은 0이 되어야 하며, 수직 방향의 반력 힘(F
Y) 의 합은 베어링 하중(W
b) 과 같아야 한다.
(7)
각 패드의 모멘트 평형과 피봇 힘 평형, 그리고 수 평 및 수직 방향 힘 평형 방정식을 식 (8)에 나타내었 다. 동시해 ( ) 계산을 위해 Newton-Raphson 수치해 석 기법을 사용하였으며, 이를 통해 정적 평형 상태에 h = ( R
P– R
J) ecos θ – (
c– θ ) + { ζ R – (
P– R
b) }
cos ( θ θ –
p) – δ ( R
p+ t
p)sin θ θ ( –
p)
∂x ∂ --- ρh
3
12µ ---∂p
∂x ---
⎝ ⎠
⎛ ⎞ ∂
∂z --- ρh
3
12µ ---∂p
∂z ---
⎝ ⎠
⎛ ⎞ ∂
∂x --- R
JΩ --- 2 ρh
⎝ ⎠
⎛ ⎞ ∂
∂t ---- ( ) ρh +
= +
R
p+ t
p( ) θ θ ( –
p)pcos θ θ ( –
p) x d z d
xs xe
∫
L 2⁄ –
L 2⁄
∫ = 0
p K –
pζ
( )cos θ θ ( –
p) x d z d
xs xe
∫
L 2⁄ –
L 2⁄
∫ = 0
F
X∑ pcosθ x d z d
xs xe
∫
L 2⁄ –
L 2⁄
∫
i 1= Npads
∑ 0
= =
F
Y∑ psinθ x d z d
xs xe
∫
L 2⁄ –
L 2⁄
∫ – W
bi 1= Npads