1. 서론
국내 밭 경작지는 경사로와 험로가 많고 같은 작물이 라도 지역마다 재배양식이 달라 정형화시키기 힘들다. 이 런 비정형화 된 재배양식으로 인해 밭농업 기계 개발은
벼농업에 비해 기계 개발이 힘들며 많은 인력이 요구된 다. 통계청에 따르면 벼농사의 농업기계화율이 98.4%인 것에 비해 밭농사는 60.2%로 조사되었으며 단계별 작업 중 수확 작업의 연구가 가장 빈약한 것으로 확인되었다 (KOSIS, 2019).
밭작물 중 매년 많은 수요가 요구되는 고추의 경우, 경 운, 정지 작업 기계화율 99.8%, 방제 작업 기계화율은 82.8%에 비해 수확 작업은 기계화율 통계 집계가 되지 않을 정도로 미비한 것으로 나타났다(KOSIS, 2017). Kim 등(2009)의 노지 고추 재배작업에 따른 근골격계 작업부 담 조사에 따르면 수확 작업은 육묘, 경운 작업, 정식, 방제 등 고추 재배의 여러 작업 단계 중에서 가장 높은 노동 강도로 조사되었다. 이처럼 노동 부담이 큰 수확 작업은
시뮬레이션을 이용한 고추 수확기의 동적 특성 연구
강석호 ・ 김준희 ・ 김영수 ・ 우승민 ・ 두윰우예다니엘 ・ 하유신†
A Simulation Study on the Dynamics Characteristics of Hot Pepper Harvester
Seokho Kang ・ Junhee Kim ・ Yeongsu Kim ・ Seungmin Woo ・ Dooyum Uyeh Daniel ・ Yushin Ha
†ABSTRACT
The field farming machine is difficult to develop due to its heavy slopes, tough roads and unformatted cultivation by growing crops. In particular, harvesting is a major problem in rural areas in Republic of Korea where aging is accelerated with work requiring a lot of time and manpower. This study seeks to analyze the dynamic characteristics of hot pepper harvester developed to replace manpower, reduce working hours and mechanize harvesting operations. To analyze the dynamic characteristics of a hot pepper harvester, the dynamic program Recurdyn was used and all analysis were performed as case of an empty vehicle. Based on the results, this study can suggest dynamic safety range of multi-purpose driving platform with hot pepper harvester.
Key words : Hot pepper harvester, Multi-purpose driving platform, Dynamic characteristic Recurdyn, Dynamic simulation
요 약
밭 농업 기계는 심한 경사지와 험로, 재배 작물별 정형화되지 않은 재배양식으로 인해 개발이 어렵다. 특히 고추 수확 작업은 많은 시간과 인력이 요구되는 작업으로 고령화가 가속화되는 국내 농촌의 큰 문제점이다. 본 연구는 부족한 인력을 대체하고 작업 시간을 줄이며 수확 작업을 기계화하기 위해 개발된 고추 수확기의 동적 특성을 연구하고자 한다. 고추 수확기 의 동적 특성을 분석하기 위해 동역학 프로그램인 Recurdyn을 이용하여 진행하였으며 모든 분석은 공차를 전제로 분석을 진행하였다. 시뮬레이션 결과에 따라 주행 플랫폼이 주행할 수 있는 안전 범위를 제시하였다.
주요어 : 고추 수확기, 다목적 주행 플랫폼, 동적 특성, Recurdyn, 동역학 시뮬레이션
* 본 논문은 2019년 산업통상자원부 및 산업기술평가관 리원(KEIT) 연구비로 연구하였음(관리번호 2003975) 이 연구는 2019년도 산업통상지원부 및 산업기술 평가 관리원(KEIT) 연구비 지원에 의해 연구되었습니다.
Received: 24 April 2020, Revised: 31 July 2020, Accepted: 10 August 2020
†Corresponding Author: Yu Shin Ha E-mail: [email protected]
Kyungpook National University & Bio-industrial Machinery Engineering
기계화 연구 단계에 있으며 본 연구는 개발 중인 고추 수확 기의 동적 특성을 분석하고 안전 범위를 제시하고자 한다.
2. 선행 연구
고추 수확기 개발을 위한 선행 연구로는 나선 원통 모 형의 수확 탈실부의 최대 회수율 연구를 위해 탈실부의 적정 회전수와 기계의 작업 속도에 관한 연구가 진행되 었다(Lee et al, 1993). 고추 수확기 개발을 위해 농가들 을 대상으로 설문 조사를 시행한 결과, 부착형식이 아닌 별도의 전용기를 요구하는 농가가 많았으며 경작하는 땅 이 평지보다 경사지인 농가가 많았다(Lee et al, 1995).
농민들이 경작지에 경사를 많이 언급한 이유는 경사지에 서의 기계 적용의 여부, 기계 안전성의 문제로 분석된다.
국립농업과학원에서 실시한 농기계 농작업 사고 실태 조 사(2013)에 따르면 사고의 50.5%가 운반이동 중 발생했 으며 사고 유형으로는 24.2%가 접촉, 충돌, 타격 등에 의 한 사고였다. 따라서 고추 수확기는 경사로에서의 주행 안전성, 선회 상황에서의 사고 위험 감소 등의 동적 특성 이 요구된다.
본 연구에서는 무한궤도 형식의 고추 수확기의 국내 경작지 적용 가능 여부를 판단하고자 동적 특성 연구를 진행하였다. 작업 속도에 따른 작업 가능 경사도, 전도 분 석(Tilting, Pitching), 장애물 충돌 시 전도 분석, 회전 방 법에 따른 최소회전반경 분석을 하였다.
3. 재료 및 방법
3.1 3D Model 형상화
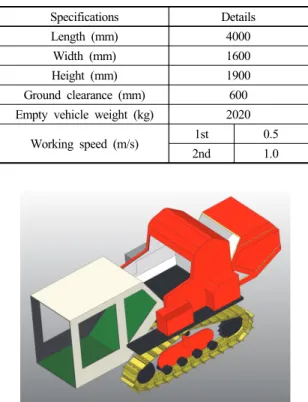
3D 모델링 프로그램인 NX.UG(11, Siemens, Germany) 과 동역학 시뮬레이션 프로그램인 Recurdyn(V8R5, FunctionBay, Korea)를 사용하여 동역학 시뮬레이션을 위한 3D 형상화 작업을 진행하였다. 상부 고추 수확기는 NX.UG 11을 사용하여 형상화하였으며 하부 주행 플랫 폼은 Recurdyn V8R5의 무한궤도 기능을 사용하여 형상 화하였다. 고추 수확기의 재원은 Table 1과 같이 전장 4000 mm, 전폭 1600 mm, 전고 1900 mm, 지상고 600 mm, 공차 중량 2020 kg이며 Fig 1과 같이 3D Model 형상을 나타냈다. Cho 등(2009)은 시뮬레이션에 사용될 필요한 요소들을 중점으로 계산량을 줄일 수 있는 단순화된 동 역학 모델을 제안하였다. 본 연구에서의 시뮬레이션 진행 방법 또한 계산량을 줄이고 원활한 시뮬레이션을 위해 형상을 단순화 작업을 진행하였다. 모든 시뮬레이션은 공
차 상태를 기준으로 진행하였다.
Specifications Details
Length (mm) 4000
Width (mm) 1600
Height (mm) 1900
Ground clearance (mm) 600 Empty vehicle weight (kg) 2020
Working speed (m/s) 1st 0.5
2nd 1.0
Table 1. Specifications of hot pepper harvester
Fig. 1. Multipurpose driving platform 3D model
3.2 작업 속도에 따른 작업 가능 최대경사 각도 분석
3.2.1 실험 방법
국내 밭농사 경지 특성상 경사로가 많은 것을 고려해 고추 수확기가 작업 가능한 최대경사 각도를 분석하였다. 시뮬레이션은 Fig. 2와 같이 지면에 경사로를 설치하고
Fig. 2. Climbing angle analysis
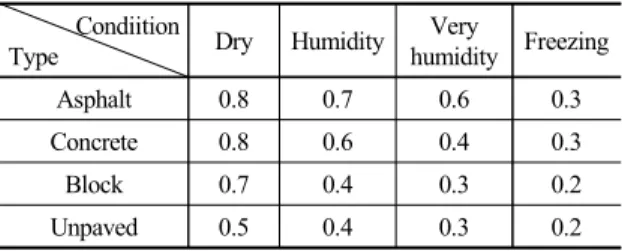
고추 수확기가 등반할 수 있는 최대경사 각도를 작업 속 도별(1단 0.5 m/s, 2단 1.0 m/s)로 실시하였다. 실제 기계 가 주행하는 지면은 비포장도로이기에 Lim 등(2010)의 노면 포장별 마찰계수에 관한 연구를 참고하여 비포장상 태의 마찰계수 0.5를 입력하였다.
Condiition
Type Dry Humidity Very
humidity Freezing
Asphalt 0.8 0.7 0.6 0.3
Concrete 0.8 0.6 0.4 0.3
Block 0.7 0.4 0.3 0.2
Unpaved 0.5 0.4 0.3 0.2
Table 2. Friction coefficient by surface type (domestic standard)
Table 3은 국내 밭 경사별 분포면적을 조사한 것이다 (국립농업과학원, 2011). 고추 수확기의 주행 가능한 국 내 밭 면적을 확인하기 위해 시뮬레이션 결과와 국내 밭 경사도 분포면적을 비교해 고추 수확기의 적용 가능한 범위를 비교하였다.
Slope ( ˚ ) Area (ha) Ratio (%)
0 ~ 0.9 40,257 6.67
0.9 ~ 3.15 142,525 23.64 3.15 ~ 6.75 285,782 47.39 6.75 ~ 13.5 106,616 17.68
13.5 ~ 27 24,231 4.02
27 ~ 45 3,572 0.59
Table 3. Domestic distribution area by slope
3.2.2 실험 결과
Table 4는 고추 수확기의 작업 속도에 따른 작업 가능 한 최대경사 각도 시뮬레이션 결과를 나타난 표이다. 최 대경사 각도는 1단(0.5 m/s)과 2단(1.0 m/s) 모두 23 deg 로 나타났으며 그 이상의 경사지에서는 등반하지 못하는 것으로 나타났다. Table 3의 국내 밭 경사지의 경사각 분 포도를 확인해보면 구분에 따라 13.5 deg 이하의 경사지
Velocity (m/s) Angle (deg) 0.5 (1st Gear) 23.0 1.0 (2nd Gear) 23.0 Table 4. Maximum angle by velocity
면적이 95%인 것을 알 수 있다. 따라서 고추 수확기를 장착한 고추 수확기의 작업 가능 최대경사 각도인 23 deg는 국내 경사지의 95% 이상 면적에서 작업이 가능한 것으로 분석되었다.
3.3 전도 분석 (Tilting, Pitching)
3.3.1 실험 방법
Fig. 3은 Longitudinal 방향인 Tilting 전도 분석을 나 타낸 것이고 Fig. 4는 Lateral 방향인 Pitching 전도 분석 을 나타낸 것이다. 고추 수확기의 공차 시 전도 분석은 지면에 기울기를 발생시켜 고추 수확기의 윤거가 지면에 서 떨어지는 한계 각도를 분석하였다. 고추 수확기는 앞, 뒤의 무게 배분이 다르므로 Pitching 분석의 경우 앞으로 전복되는 한계치와 뒤로 전복되는 한계치 두 가지로 나 누어 시뮬레이션을 진행하였다.
Fig. 3. Tilting test
Fig. 4. Pitching test
3.3.2 실험 결과
면이 기울어지는 방향에 따라 고추 수확기의 Tilting, Pitching의 전도 분석 결과는 다음과 같다. 공차 시 고추 수확기는 Tilting 방향으로 37.89 deg에서 윤거가 지면에 서 벗어나기 시작하였고 이때 지면으로부터의 높이는 약 50 cm인 것으로 분석되었다. Pitching 방향으로의 전도 분석 결과, 앞쪽으로 58.36 deg, 뒤쪽으로 53.36 deg에서 윤거가 지면에서 벗어나기 시작했다. 이는 시뮬레이션 조 건인 비어있는 적재함과 운전자가 탑승하지 않은 상황에 서 상대적으로 무게중심이 앞쪽으로 치우쳐져 있기 때문 인 것으로 판단된다.
Analysis case Maximum angle (deg)
Tilting 37.89
Pitching Front 58.36
Rear 53.36 Table 5. Tilting and pitching analysis results
3.4 장애물 충돌 시 전도 분석
3.4.1 실험 방법
Fig. 5는 장애물 충돌 시뮬레이션 시험을 Recurdyn V8R5로 나타낸 모습이다. 고추 수확기는 평지뿐만 아니 라 목적에 따라 경사지와 험로를 주행한다. 그에 따른 주 행 안전성을 분석하기 위해 지면에 장애물을 설치해 한 쪽 윤거를 통과시키는 주행 시뮬레이션을 진행하였다. 장 애물의 크기는 지면으로부터 높이로 정의하였다. 장애물 의 크기에 따라 고추 수확기가 주행 가능한 장애물의 최 대 크기를 확인하고 그때 발생하는 Roll angle을 분석하 였다.
Fig. 5. Obstacle collision test
3.4.2 실험 결과
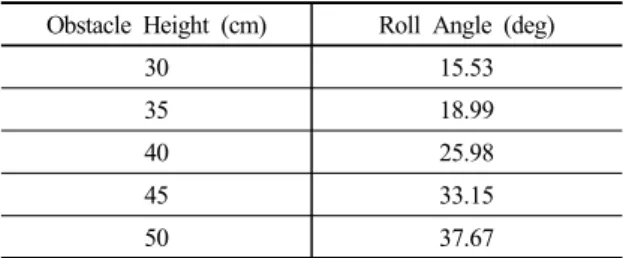
Tilting 전도 분석 결과 고추 수확기의 Tilting 방향 최 대 각도일 때 지면으로부터 높이는 약 50 cm였다. 이를 바탕으로 장애물을 5 수준(30, 35, 40, 45, 50 cm)으로 설치해 장애물 충돌 시 전도 분석을 시행하였으며 각각 15.53 deg, 18.99 deg, 25.98 deg, 33.15 deg, 37.67 deg 로 분석되었다. 이때 충돌 후 주행 가능한 최고 장애물 높이는 45 cm로 분석되었으며 장애물 높이가 50 cm일 때 전복 현상이 일어났다. 장애물 높이 50 cm일 때 발생 한 roll angle은 앞서 진행한 tilting 전도 분석에서의 각 도와 유사한 수치인 것으로 분석된다. 정지 상태에서의 최대경사 각도와 동적 상태에서의 최대경사가 비슷한 이 유는 주행 속도가 최대경사도 결정에 영향을 끼칠 만큼 빠른 속도가 아니기 때문인 것으로 판단된다.
Obstacle Height (cm) Roll Angle (deg)
30 15.53
35 18.99
40 25.98
45 33.15
50 37.67
Table 6. Roll angle by obstacle height
3.5 회전 방법에 따른 최소 회전반경 분석
3.5.1 실험 방법
하부 다목적 주행 플랫폼은 무한궤도 윤거 형태로 우 륜과 좌륜을 개별적으로 제어할 수 있다. 무한궤도의 특 성에 따라 밭작물 작업 시 회전반경을 최소화해 충돌 위 험을 낮추고 작물에 손상이 가지 않는 최소 회전반경을 분석하기 위해 Fig. 6과 같이 3가지 회전 방법을 적용하 였다.
(a) Soft turn (b) Spin turn (c) Break turn Fig. 6. Spin methods
Fig. 6(a)은 양쪽 윤거 속도 차이에 의해 회전하는 소 프트 턴, Fig. 6(b)은 양쪽 윤거의 회전 방향 차이에 의해 회전하는 스핀 턴, Fig. 6(c)은 한쪽 윤거는 정지한 뒤 반 대쪽 윤거의 진행으로만 회전하는 브레이크 턴 이다. 최 소 회전반경 분석은 1단과 2단 작업 속도별로 나눠 진행 하였다.
3.5.2 실험 결과
충돌 위험을 낮추고 작물 피해를 최소화하기 위한 회 전 방밥에 따른 최소 회전반경 분석 결과는 다음과 같다. 소프트 턴의 경우 1단에서 2 m, 2단에서 3 m의 회전반경 을 가진다. 스핀 턴의 경우 1단에서 0.7 m, 2단에서 0.8 m 의 회전반경으로 제자리 턴에 가까운 결과로 나타났다. 브레이크 턴의 경우 1단과 2단에서 모두 0.8 m의 회전반 경을 가지는 것으로 나타났다. 따라서 고추 수확기를 사용 하여 밭작업 시 작업 상황에 맞는 회전 방법을 통해 충돌 위 험을 낮추고 작물 피해를 최소화할 수 있다고 분석된다.
Method
Velocity Soft Spin Break
0.5 (m/s) 2 m 0.7 m 0.8 m 1.0 (m/s) 3 m 0.8 m 0.8 m Table 7. Result of rotation radius simulations
4. 결론 및 향후 과제
본 연구는 고추 수확기의 동적 특성을 분석하기 위해 동역학 시뮬레이션 프로그램인 Recurdyn을 이용하여 주 행 가능 최대경사각도, 전도 분석, 장애물 충돌 시 전도 분석과 회전 방법에 따른 최소 회전반경 분석을 진행한 결과 다음과 같은 결론을 얻을 수 있었다.
고추 수확기의 작업 속도 1단 0.5 m/s, 2단 1.0 m/s에 서 작업 가능한 최대경사 각도를 분석한 결과, 모든 작업 속도에서 최대 23 deg까지 작업이 가능하다. 이는 국내 밭 경사지 중 95% 이상의 경사지에서 작업이 가능한 것 을 분석되었다.
Tilting과 Pitching 방향의 전도 분석으로는 Tilting 방 향 최대 37.89 deg, Pitching 방향 최대 앞쪽으로 58.36 deg, 뒤쪽으로 53.36 deg를 가지는 것으로 분석되었다.
따라서 주행 시 Tilting 방향으로 37 deg 이하, Pitching 방향으로 53 deg 이하에서 주행하는 것이 안전하다.
장애물 충돌 시 전도 분석 결과, 장애물 높이 50 cm에 서 전복이 일어났으며 이때 발생한 roll angle은 37.67
deg로 앞서 실행한 전도 분석과 유사하게 나타났다. 고추 수확기는 주행 시 높이 50 cm 이상의 장애물과 충돌 시 전복의 위험이 있은 것으로 분석되었다.
3가지 회전 방법(소프트 턴, 스핀 턴, 브레이크 턴)에 따른 작업 속도별 최소 회전반경 분석 결과, 소프트 턴 경우 1단에서 2 m, 2단에서 3 m, 스핀 턴 경우 1단에서 0.7 m, 2단에서 0.8 m, 브레이크 턴 경우 1단과 2단 모두 0.8 m의 회전반경을 가지는 것으로 분석되었다. 작업자 는 작업 상황에 따라 적절한 회전 방법을 통해 재배 작물 의 피해를 줄이고 충돌 위험을 낮출 수 있을 것으로 분석 된다.
본 연구에서는 고추 수확기의 주행 특성을 동역학 시 뮬레이션을 통해 분석하였다. 하지만 시뮬레이션에 적용 된 조건은 작물의 적재와 작업 운전자 탑승을 고려되지 않은 공차의 상태로 진행되었다. 따라서 작물의 적재와 운전자의 탑승이 고려된 구체적인 작업 환경을 반영한 연구가 추가로 필요할 것으로 판단된다.
Reference
1. Cho. Y. J., Kim. J. S. and Kim. M. H., The simplified dynamics model for real-time Vehicle Motion, The Korea Society For Simulation, pp.
230-234. 2009.
2. Kim. J. H. and Park. S. j., Running stability of the Semi-Crawler Type Mini-Forwarder by Using a Dynamic Analysis Program, Journal of Korean Forest Society, Vol. 104, No 1, pp. 98-103. 2015.
3. Kim. K. R., Lee. K. S., Kim. H. C. and Song. E. Y., Health Status and Musculoskeletal Workload of Red Pepper Farmers, Journal of the Ergonomics Society of Korea, Vol. 28, No.3 pp. 7-15. August 2009.
4. Kong. M. K., Park. D. S., Shim. S. B. and Jang. I.
J., Working Principle of a Novel Three-directional Dumping Vehicle and Its Dumping Stability Analysis Under Ground-slope Conditions, Journal of Biosystems Engineering, Vol. 42, No 4, pp. 235-241. 2017.
5. Korea Statistical information Service (KOSIS), Agricultural machinery holding status. 2019.
6. Korea Statistical information Service (KOSIS), Mechanization of field crops. 2017.
7. Lee. C. H., Park. S. J., Kim. C. S., Lee. J. Y. and Kim. Y. H., A Fundamental Study for Development
of a Pepper Harvester, Korean Society for Agricultural Machinery, Vol. 18, No 2, pp. 110-121. 1992.
8. Lee. C. H., Park S. J., Kim. C. S., Lee. J. Y., Kim.
M. H. and Kim. Y. H., Determination of Development Strategy for a Pepper Harvester, Korean Society for Agricultural Machinery, Vol. 20, No 1, pp. 22-35.
1995.
9. Lim. C. S. and Choi. Y. W., The Experimental Study on the Transient Brake Time of Vehicles by Road Pavement and Friction Coefficient, Korea Society of Civil Engineers, Vol 30, No 6, pp. 587- 597. 2010.
강 석 호 (ORCID : https://orcid.org/0000-0002-5912-7044 / [email protected]) 2018 영남이공대학교 공학사
2019~ 현재 경북대학교 석사 과정 관심분야 : 시뮬레이션, Dynamic Analysis
김 준 희 (ORCID : https://orcid.org/0000-0001-6458-2378 / [email protected]) 2017 전주대학교 공학사
2019 경북대학교 공학석사
2019~ 현재 경북대학교 공학박사 과정 관심분야 : 모델링, 최적화
김 영 수 (ORCID : https://orcid.org/0000-0001-5153-9469 / [email protected]) 2017 영남이공대학교 공학사
2019 경북대학교 공학석사
2019~ 현재 경북대학교 공학박사 과정 관심분야 : 모델링, 최적화, 공정분석
우 승 민 (ORCID : https://orcid.org/0000-0001-9434-2455 / [email protected]) 2003 대구가톨릭대학교 공학사
2015 경북대학교 공학석사 2018 경북대학교 공학박사 2020 경북대학교 연구교수 관심분야 : 시뮬레이션, 공정분석
두윰우예다니엘 (ORCID : https://orcid.org/0000-0003-1790-210X / [email protected]) 2013 University of Mkar 공학사
2015 경북대학교 공학석사 2018 경북대학교 공학박사 2020 경북대학교 연구교수
관심분야 : 시뮬레이션, 알고리즘, 공정분석
하 유 신 (ORCID : https://orcid.org/0000-0002-9434-8694 / [email protected]) 1997 경북대학교 농학사
2001 경북대학교 공학석사 2007 경북대학교 공학박사 2013~ 현재 경북대학교 부교수 관심분야 : 공정분석, 최적화, 모델링