ISSN 1226-3133 (Print)․ISSN 2288-226X (Online)
Ⅰ. 서 론
클래스간 분리도 측정은 얼굴 인식, 영상 분류, 컴퓨터 비전 분야에서 특성 벡터의 구분 성능을 평가하기 위해
연구되어져 왔다. 일반적으로 클래스간 분리도 측정 방법 은 분포 기반 기법(distribution-based method)과 분산 행렬 기반 기법(scatter matrix-based method)로 구분할 수 있다.
분포 기반 기법은 특성 벡터의 확률 분포도를 이용하여
레이다 신호의 클래스 분리도 측정을 위한 연구
Study on Class Separability Measure for Radar Signals
정성재․이승재․김경태*
Seong-Jae Jeong․Seung-Jae Lee․Kyung-Tae Kim*
요 약
본 논문에서는 레이다 신호를 위한 새로운 클래스간 분리도 측정 방법을 제시한다. 제안된 방법에서는 표적과 레이다 간의 상대적 각도 차이의 따른 레이다 신호의 민감도를 감소시키기 위해 RCS(radar cross section)의 경우 두 신호의 상관 계수(correlation coefficient)를 구하고, 1차원 신호의 경우(i.e., high resolution range profile(HRRP)) 선형이동을 하며 상관계 수를 구한다. 2차원 레이다 신호(i.e., inverse synthetic aperture radar(ISAR))의 경우 두 레이다 신호를 회전하면서 상관계수 를 계산한다. 그런 다음, 두 레이다 신호가 가장 잘 배열되었을 경우의 최대 상관계수를 구하고, 이를 이용해 새로운 형태의 상관 기반 분리 행렬을 구성한다. 상관 기반 분리 행렬의 누적분포함수를 구하여 상위 확률에 응답하는 값을 구하였고, 그 값은 레이다 신호의 분리 능력을 정확하게 나타낸다. 제안한 방법을 이용한 실험 결과, 표적 분리 능력을 정확하게 추정할 수 있었다.
Abstract
In this paper, we propose a novel class separability measure for radar signals. To reduce the sensitivity of the relative aspect angle between a target and radar, to evaluate the discriminatory power of radar signals, the proposed method first calculates the correlation coefficients between two radar cross sections (RCSs) or linearly shifts one-dimensional (1D) radar signals (i.e., high-resolution range profiles (HRRPs)), or rotates two 2D radar signals (i.e., inverse synthetic aperture radar (ISAR) images). Then, it uses the maximum correlation coefficient when two radar signals are best aligned. Next, the proposed method obtains new correlation-based discriminant matrices (CDM) using maximum correlation coefficients. Finally, the cumulative distribution function (CDF) in the CDM and the value corresponding to the specific probability in the CDF are obtained, and this value represents the discriminatory power of the radar signal.
Experimental results show that the proposed method can accurately measure the target separability.
Key words: Class Separability Measure, Correlation Coefficient, Classification
「이 연구는 2016학년도 정부(미래창조과학부)의 재원으로 한국연구재단의 지원을 받아 수행된 기초연구사업임(No. NRF-2015R1A2A2A01003645)」
포항공과대학교 전자공학과(Department of Electrical Engineering, Pohang University of Science and Technology)
․Manuscript received January 29, 2018 ; Revised February 20, 2018 ; Accepted February 21, 2018. (ID No. 20180129-015)
․Corresponding Author: Kyung-Tae Kim (e-mail: [email protected])
특성 벡터의 성능을 평가한다. 대표적인 방법으로 다이버 전스(divergence), 바타차야 거리(Bhattacharyya distance), 체 르노프 바운드(Chernoff bound) 등이 있다[1]~[5]. 분산 행렬 기반 방법은 클래스간 분산(between-class scatter)와 클래 스내 분산(within-class scatter)의 비율을 이용하는 방법으 로서 대표적으로 선형 판별 분석법(linear discriminant ana- lysis: LDA)이 있다[6]~[9].
기존 제시된 방법의 경우, 얼굴 인식, 컴퓨터 비전 분야 에서 특성 벡터의 구분 성능을 성공적으로 측정하였다.
하지만 기존 제시된 방법을 레이다 신호, 즉 레이다 반사 면적(radar cross section: RCS), 고해상도 거리 측면도(high resolution range profile: HRRP), 역합성 개구레이다 영상 (inverse synthetic aperture radar image: ISAR image)에 적용 하였을 경우, 레이다 신호의 내재된 특성으로 인해 잘못 된 분리 성능을 제공한다.
일반적으로, 레이다 신호는 표적과 레이다간의 상대적 각도에 매우 민감하다[10],[11]. 즉, 표적과 레이다 방향의 미 소변화에도 역산란된 에너지나 혹은 산란점의 공간적 분 포가 상당히 많이 변한다. 따라서 표적과 레이다 각도가 광각(wide angle)의 경우, 레이다 신호의 분포는 가우시안 분포, Rayleigh 분포, Chi square 분포 등의 잘 알려진 통계 적 모델 분포에 부합하지 않는다. 분포 기반 기법의 경우 특성 벡터의 가우시안 분포를 가정하였기 때문에, 레이다 신호가 통계적 모델과 부합하지 않았을 경우 잘못된 클 래스 분리도를 제공하게 된다[1]~[5].
분산 행렬 기반 방법의 경우 데이터 크기가 훈련 데이 터의 수보다 작아야 잘 동작한다. 그렇지 않을 경우, 클래 스내 분산 행렬의 특이점 문제가 발생하게 되고, 잘못된 클래스 분리도를 제공하게 된다[6]. 현대 레이다 시스템의 경우 해상도를 높이기 위해 광대역 레이다를 일반적으로 사용하는데, 이는 레이다 신호의 데이터 크기가 증가하는 요인이 된다. 따라서 데이터 크기 증가로 인해 분산 행렬 기반 방법은 현대 레이다 신호의 클래스 분리도 측정에 서 제한적으로 적용이 가능하다.
본 논문에서는 이러한 기존 방법의 단점을 보완하고자 레이다 신호에 적합한 상관관계에 기반한 클래스 분리 측정 방법을 제안한다. 제안된 방법에서는 1차원 레이다 신호의 경우 선형 이동을 하며 상관계수(correlation coeffi-
cient)를 계산하고, 2차원 레이다 신호의 경우 두 레이다 신호를 회전하면서 상관계수를 계산한다. 그리고 두 신호 가 가장 잘 배열되었을 경우의 상관계수를 구한다. 이를 통해 제안된 방법의 경우, 레이다와 표적간의 각도 변화 에 의해 발생하는 산란점 변화에 기존 방법보다 덜 민감 한 장점이 있다. 또한, 제안된 방법은 최대 상관계수를 이 용하여 클래스내 상관 행렬(within-correlation matrix)과 클 래스간 상관 행렬(between-correlation matrix)을 각각 구한 다. 그런 다음 클래스내 상관 행렬에서 클래스간 상관 행 렬을 빼어 상관 기반 분리 행렬(correlation-based discrimi- nant matrix)을 구한다. 상관 기반 분리 행렬의 경우 레이 다와 표적 간의 각도 변화에 덜 민감하고, 표적 내(within- target)와 표적 간(between-target)의 상관정도를 잘 나타내 기 때문에, 이를 이용하여 레이다 신호의 분리 능력을 정 확하게 추정할 수 있다. 게다가 기존 분산 행렬 기반 기법 의 경우 레이다 신호의 크기가 훈련 데이터의 수보다 작 아야 하지만, 제안된 방법의 경우 레이다 신호 크기의 관 계없이 구할 수 있다. 따라서 제안된 방법은 레이다 신호 의 분리 능력 측정에 있어 더 광범위하게 활용될 수 있다.
레이다 신호의 클래스 분리도 측정 방법에 대한 연구 는 다음과 같다. Ⅱ장에서는 제안한 상관기반 분리도 측 정방법에 대하여 기술하고, Ⅲ장에서는 제안된 방법을 이 용한 실험 및 결과를 보여주고, Ⅳ장에서는 결론을 도출 한다.
Ⅱ. 제안한 상관기반 분리도 측정 방법 2-1 상관계수(Correlation Coefficient)
상관계수는 두 변수 간에 선형적 관계를 측정하는 통 계적 방법이다[9]. 상관계수의 범위는 -1에서 1이고, 두 변수의 크기와 방향이 동일하면 1, 크기는 같고 방향이 정반대면 -1이다. 제안된 방법은 RCS의 경우 두 신호의 상관계수를 구하고, 1차원 레이다 신호의 경우 선형 이동 을 하며 상관계수를 계산하고, 2차원 레이다 신호의 경우 레이다 신호를 회전하면서 상관계수를 계산한다. 그리고 최대 상관 계수를 구한다. 최대 상관계수는 두 신호가 최 대한 배열되었을 경우를 나타내기 때문에 이를 활용하면 레이다와 표적 간의 각도 변화로 발생하는 산란점 분포
의 변화에 덜 민감하게 된다.
의 크기를 가지는 두 RCS 신호를 r, r라 하면, 상관계수는 식 (1)로 구할 수 있다.
rr
(1) 계산 효율을 높이기 위해 푸리에 변환(Fourier trans- form)을 식 (1)에 적용한다.
rr
(2)
의 크기를 가진 1차원 HRRP를x, x라 하면, 두 신호간의 선형 이동에 대한 상관계수는 식 (3)으로 계산 할 수 있다.
x x (3)
여기서, x 은 k만큼x 신호 를 선형 이동함으로써 구해진다. 최대 상관계수는 식 (4) 로 계산한다.
max (4)
선형이동에 대한 상관계수를 구하는 것은 많은 연산을 필요로 함으로 푸리에 변환(Fourier transform)을 이용하여 이들 연산을 고속으로 수행한다.
arg max
xx
(5) 여기서, ∙과 ∙는 1차원 푸리에 변 환과 역 푸리에 변환을 각각 나타낸다.2차원 레이다 신호인 ISAR 영상 신호를I, I
를 가정하자. 여기서,
, 는 거리 방향의 픽셀 수, 는 수직 거리 방향의 픽셀 수이다. I과 I의 회전 중심이 같다 고 가정하면, 두 ISAR 영상 간의 상관계수는 식 (4)로 구 할 수 있다.
II
(6) 여기서 , I는 I를 만큼 회전시킨 영상, 는 각도 개수이다. 연산 효율성을 향 상시키기 위해 식 (6)에 푸리에 변환을 적용한다.
II
(7) 여기서, , ∙과 ∙는 2 차원 푸리에 변환과 역 푸리에 변환을 각각 나타낸다. 최 대 상관계수는 식 (8)로 계산한다.
max (8)
2-2 제안한 클래스 분리 방법
식 (2), (6), (8)을 이용해 구해진 최대 상관계수를 사용 하여 클래스 내 상관 행렬(within-correlation matrix)과 클 래스간 상관 행렬(between-correlation matrix)을 각각 구할 수 있다. 는 각도 개수, 는 표적의 수일 때, p번째 표적의 클래스 내 상관 행렬은 식 (9)로 구할 수 있다.
Z
⋮ ⋮ ⋯ ⋱ ⋮ ⋯
⋱ ⋮
⋯
(9) 여기서, , 는 p 표적의 각도 와 간의 최대 상관계수를 나타낸다. 다음으로 표적 p와 표적 q 사이의 클래스간 상관 행렬은 식 (10)으로 구할 수 있다.
Z
⋮ ⋮ ⋯ ⋱ ⋮ ⋯
⋱ ⋮
⋯
(10) 여기서, , , ≠ ,
는 표적 p의 각도 와 표적 q의 각도 간의 최대 상관계 수를 나타낸다.
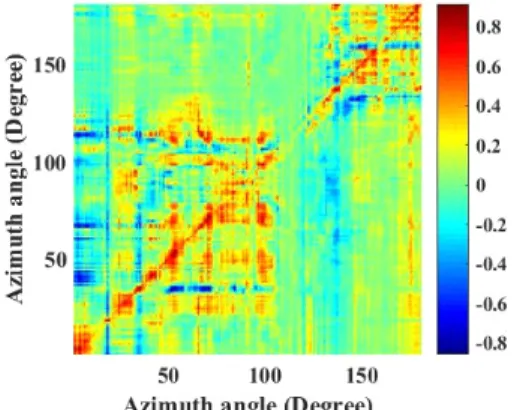
그림 1은 F16의 HRRP를 이용하여 계산된 클래스 내
상관 행렬을 나타낸다. 클래스 내 상관 행렬의 주대각(main diagonal) 성분은 두 신호 x, x간의 병진 이동 성분을 제외하고는 동일함으로 단위원(unity)이 된다.
그림 2는 F16과 YF23간의 HRRP를 이용하여 계산한 클래스간 상관 행렬을 나타낸다. 여기서, HRRP가 우수한 식별성능이 나타낸다면 클래스 내 상관 행렬의 상관계수 의 값들은 크고, 반면 클래스간 상관 행렬의 상관계수들 은 작은 값을 가진다. 이러한 클래스 내 상관 행렬과 클래 스간 상관 행렬의 성질을 이용하여 클래스 내 상관 행렬 에서 클래스간 상관 행렬을 빼어 새로운 상관 기반 분리 행렬(correlation-based discriminant matrix)을 다음과 같이 구할 수 있다.
Z
× Z Z (11) 여기서, , , ≠ ,
, 이다.
그림 3은 클래스 내 상관 행렬과 클래스간 상관 행렬을 이용하여 구성된 상관 기반 분리 행렬을 나타낸다. 상관 기반 분리 행렬의 각 요소를 상관 기반 분리 비율(corre- lation-based discriminant ratio)라 하고, 이를 이용하면 HRRP 의 클래스 분리 능력을 측정할 수 있다. 즉, 상관 기반 분 리 행렬이 큰 값을 많이 포함하고 있다면, HRRP는 식별 성능이 높게 나타난다.
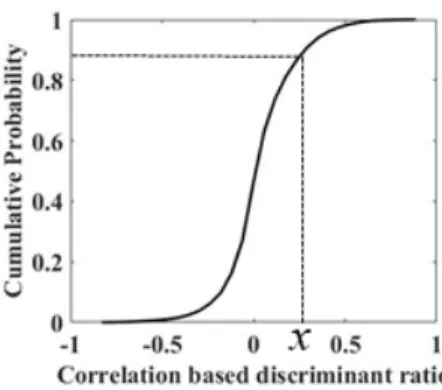
상관 기반 분리 행렬 값들의 분포를 확인하기 위해 그 림 3에 대응하는 누적 분포 함수(cumulative distribution function)를 그림 4에 나타내었다. 누적 분포 함수는 확률 분포에서 확률 변수가 특정 값보다 작거나 같은 확률을 나타내고, 이를 이용하여 상위 확률 에 응답하는 을 식 (12)로 구할 수 있다.
≤ (12)
는 상관 기반 분리 행렬의 큰 수의 양을 정량적으로 분석할 수 있게 해준다. 즉, 의 값이 크면 상관 기반 분 리 행렬에 큰 값이 많다는 것을 의미하고, 클래스 분리 능 력이 높다.
총 표적의 수가 이면, 한 개의 표적에서 개 의 클래스간 상관행렬과 상관 기반 행렬을 각각 구할 수 있다. 따라서 총 표적에 대한 상관 기반 행렬의 개수는
× 이고, 모든 표적에 대한 확률 x의 평균은 식 (13)을 이용하여 구할 수 있다.
(13) 여기서, 는 표적의 인덱스이고, 는 번째 표적에서 에 상응하는 인덱스가 된다. 의 크기가 크다면, 높 은 클래스 분리 능력을 나타내기 때문에 를 이용 하여 레이다 신호의 분리 능력 추정할 수 있다.
Ⅲ. 실험 및 결과 3-1 실험 환경
제안한 방법의 클래스 분리 능력을 평가하기 위해 4개
그림 1. HRRP를 이용한 F16에 대한 클래스내 상관 행렬 Fig. 1. Winthin-correlation matrix of F16 using HRRP.
그림 2. F-16과 YF23간의 HRRP를 이용한 클래스간 상 관행렬
Fig. 2. Between-correlation matrix between F16 and YF23 using HRRP.
그림 3. 그림 1에서 그림 2를 각 요소별로 뺀 다음 구해 진 상관 기반 분리 행렬
Fig. 3. Correlation based discriminant matrix by subtracting Fig. 2 from Fig. 1 in terms of each element.
그림 4. 그림 3에 응답하는 확률 분포도
Fig. 4. PDF(probability density function) corresponding to Fig. 3.
의 비행기(F16, Gripen, Mig25, YF23)를 이용하여 실험을 수 행하였다(그림 5). 이들의 RCS 데이터를 얻기 위해 VIRAF (virtual aircraft framework)의 물리광학법(physical optics:
(a) F16 (b) Gripen (c) Mig25 (d) YF23 그림 5. 표적의 3D CAD 모델
Fig. 5. 3D CAD models of targets..
PO)과 물리광학 회절이론(physical theory of diffraction:
PTD)을 사용하여 계산하였다[12]. 측정 고각은 90° 고정, 관측 각도는 0°~180°에 샘플 간격은 1°로 샘플 개수는 181이 다. 주파수 대역은 14.75~15.25 GHz이고, 대역폭은 500 MHz, 주파수 샘플 간격은 0.005 GHz, 샘플 개수는 101이다.
이를 기반으로 레이다 단면적, 고해상도 거리측면도, ISAR 영상에 대한 데이터를 식 (14)~식 (16)으로 구성하였다.
, (14)
(15)
(16)
여기서, ∪는 합집합, 는 F16, Gripen, Mig25, YF23순서로 대응하는 표적을 나타낸다. ×
은 번째 표적과 관련된 RCS 서브 데이터베이스이고, 는 주파수 개수로 써 101개, 는 고각 개수로 181개이다. ×
는 번째 표적과 관련된 HRRP 서브 데이터이고, 은 거리 방향의 픽셀수로 101개이다. × 는번 째 표적의 ISAR 영상에 대한 서브 데이터이고, 는 수직 거리 방향의 픽셀수로 101개이다. 따라서 ×
의 크기는 × 이다.
3-2 실험 결과
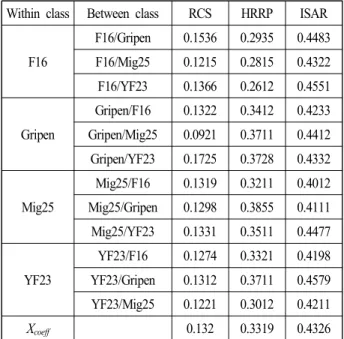
식 (9)와 (10)을 이용하여 RCS, HRRP, ISAR 영상에 대 한 클래스내 상관행렬과 클래스간 상관행렬을 구하고, 식 (11)을 이용하여 상관기반 분리 행렬을 구한다. 대표적인 상관기반 분리 행렬을 그림 6~그림 8에 나타내었다. 그런 다음 식 (13)을 이용하여 를 구하였다. 표 1은 RCS, HRRP, ISAR 영상에 대한 를 나타내었고,
는 0.132, 0.3319, 0.4326으로써 RCS, HRRP, ISAR 영상 순 서로 커진다.
제안한 방법과 비교하기 위해 기존 방법인 선형판별 분석법(linear discriminant analysis: LDA)과 바타차야 거리 (Bhattacharyya distance)를 적용하였다. LDA를 이용하여 클래스 분리 능력(, )을 구하였고, 표 2에 나타내었 다. 그 결과, , 는 RCS가16.26과 13.16으로 가장 컸 고, ISAR 영상은 10.12, 6.19로 가장 작았다. 표 3은 바타
차야 거리를 이용한 클래스 분리 능력을 나타낸다. 그 결 과, RCS, HRRP, ISAR 영상은 731, 4210, 765이고, RCS,
(a) RCS를 이용한 F16과 Gripen간의 상관 기반 분리 행렬 (a) Correlation based discriminant matrix between F16 and Gripen
using RCS
(b) RCS를 이용한 Gripen과 Mig25간의 상관 기반 분리 행렬 (b) Correlation based discriminant matrix between Gripen and
Mig25 using RCS
(c) RCS를 이용한 Mig25과 YF23간의 상관 기반 분리 행렬 (c) Correlation based discriminant matri`x between Mig25 and
YF23 using RCS
그림 6. RCS를 사용한 상관기반 분리 행렬
Fig. 6. Correlation based discriminant matrix using RCS.
(a) HRRP를 이용한 F16과 Gripen간의 상관 기반 분리 행렬 (a) Correlation based discriminant matrix between F16 and
Gripen using HRRP
(b) HRRP를 이용한 Gripen과 Mig25간의 상관 기반 분리 행렬 (b) Correlation based discriminant matrix between Gripen and
Mig25 using HRRP
(c) HRRP를 이용한 Mig25과 YF23간의 상관 기반 분리 행렬 (c) Correlation based discriminant matrix between Mig25 and YF23
using HRRP.
그림 7. HRRP를 이용한 상관기반 분리 행렬
Fig. 7. Correlation based discriminant matrix using HRRP.
(a) ISAR 영상를 이용한 F16과 Gripen간의 상관 기반 분리 행렬 (a) Correlation based discriminant matrix between F16 and
Gripen using ISAR images
(b) ISAR 영상을 이용한 Gripen과 Mig25간의 상관 기반 분리 행렬
(b) Correlation based discriminant matrix between Gripen and Mig25 using ISAR images.
(c) ISAR 영상을 이용한 Mig25과 YF23간의 상관 기반 분리 행렬 (c) Correlation based discriminant matrix between Mig25 and YF23
using ISAR images
그림 8. ISAR 영상를 이용한 상관기반 분리 행렬 Fig. 8. Correlation based discriminant matrix using ISAR
images.
표 1. 제안한 클래스 분리 측정 결과 Table 1. Proposed class separability measures.
Within class Between class RCS HRRP ISAR
F16
F16/Gripen 0.1536 0.2935 0.4483 F16/Mig25 0.1215 0.2815 0.4322 F16/YF23 0.1366 0.2612 0.4551
Gripen
Gripen/F16 0.1322 0.3412 0.4233 Gripen/Mig25 0.0921 0.3711 0.4412 Gripen/YF23 0.1725 0.3728 0.4332
Mig25
Mig25/F16 0.1319 0.3211 0.4012 Mig25/Gripen 0.1298 0.3855 0.4111 Mig25/YF23 0.1331 0.3511 0.4477
YF23
YF23/F16 0.1274 0.3321 0.4198 YF23/Gripen 0.1312 0.3711 0.4579 YF23/Mig25 0.1221 0.3012 0.4211
Xcoeff 0.132 0.3319 0.4326
표 2. LDA을 사용한 , Table 2. and using LDA.
RCS HRRP ISAR
J1 16.26 12.22 10.12
J2 13.16 11.23 6.19
표 3. 바타차야 거리를 이용한 D Table 3. D using Bhattacharyya distances.
RCS HRRP ISAR
D 731 4210 765
ISAR 영상, HRRP 순으로 클래스 분리 능력이 커진다. 제 안한 방법과 기존 방법의 경우, 클래스 분리 능력을 측정 하는데 있어 차이가 있다. 제안한 방법의 유효함을 증명 하기 위해 최근접 구분기(nearest-neighbor classifier)를 사 용하여 표적 식별 과정을 수행하였다. 식 (14)~식 (16)의 전체 데이터에서 훈련 데이터는 각도를 0°~180°까지 10°
간격으로 증가시켜 식 (17)~식 (19)로 구성한다.
∪×, (17)
∪× (18)
∪× (19) 여기서, 는 F16, Gripen, Mig25, F117 순서로 대응하는 표적 을 나타내고, 는 고각 샘플 개수로 19이다. ×
,
×, × 는 RCS, HRRP, ISAR 영상 관련한 서브 훈련 데이터이다. 나머지 데이터는 테 스트 데이터로 식 (20)~식 (22)에 저장한다.
∪×, (20)
∪× (21)
∪
×
(22)
여기서, 는 테스트를 위한 고각 갯수로 162이다.
×
, ×
,
×
는 RCS, HRRP, ISAR 영상 관련한 서브 테스트 데이터이다.
∪×, (23)
∪× (24)
∪× (25) 각 표적의 식별 성능은 전체 시험 데이터 중에서 올바 르게 구분할 수의 비율로 식 (26)으로 구한다.
전체 시험 데이터 수 올바르게 구분한 수
×
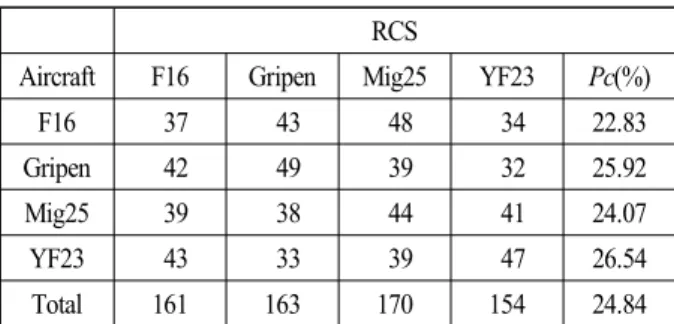
(26) 표적 식별 성능 결과는 표 4~표 6에 혼동 행렬(con- fusion matrix)로 나타내었다. RCS, HRRP, ISAR 영상에 대 한 표적 식별 성능 는 각각 24.84%, 53.86%, 69.28%이 다. 즉, RCS, HRRP, ISAR 영상 순으로 높다. 이러한 결과 는 제안한 방법의 결과와 잘 일치한다. 하지만, 기존의 LDA와 바타차야 거리의 경우 신뢰성 있는 결과를 보여 주지 못한다. LDA의 경우, ISAR 영상의 크기는 101(i.e., 거리 방향 샘플 수)×101(i.e., 수직 거리 방향 샘플 수)=
10212다. 이것은 테스트 샘플 수(i.e., 181)의 비해 훨씬 크 기 때문에 클래스내 분산 행렬(within-class scatter matrix)
표 4. RCS을 사용한 표적의 혼동 행렬 Table 4. Confusion matrix of targets using RCS.
RCS
Aircraft F16 Gripen Mig25 YF23 Pc(%)
F16 37 43 48 34 22.83
Gripen 42 49 39 32 25.92
Mig25 39 38 44 41 24.07
YF23 43 33 39 47 26.54
Total 161 163 170 154 24.84
표 5. HRRP을 사용한 표적의 혼동 행렬 Table 5. Confusion matrix of targets using HRRP.
HRRP
Aircraft F16 Gripen Mig25 YF23 Pc(%)
F16 91 42 14 15 56.17
Gripen 41 95 18 8 58.64
Mig25 25 36 84 16 51.85
YF23 30 25 28 79 48.76
Total 187 198 144 118 53.86
표 6. ISAR 영상에 대한 혼동 행렬
Table 6. Confusion matrix of targets using ISAR image.
ISAR
Aircraft F16 Gripen Mig25 YF23 Pc(%)
F16 116 15 19 12 71.6
Gripen 25 102 21 14 62.96
Mig25 11 22 109 20 67.28
YF23 21 8 11 122 75.3
Total 173 147 160 168 69.28
이 특이점(singulairy) 문제를 야기하고, 클래스간 분리 능 력을 잘못 추정하게 된다. 바타차야 거리의 경우 레이다 신호의 가우시안 분포를 가정하게 되는데, 넓은 각도의 레이다 신호의 경우 가우시안 분포에 부합하지 않기 때 문에 정확한 분리 능력을 추정하는 것이 어렵다.
결과론적으로, 제안한 방법의 경우 레이다 신호의 크 기나 혹은 분포에 상관없이 정확하게 클래스간 분리 능 력을 추정할 수 있다.
Ⅳ. 결 론
본 논문에서는 레이다 신호의 클래스 분리도 측정에 대한 연구를 수행하였다. 제안된 방법에서는 표적과 레이 다간의 상대적 각도차에 의한 레이다 신호의 민감도를 감소시키기 위해 레이다 신호간의 상관계수를 이용하였 다. 또한 상관계수를 이용하여 클래스간 상관행렬, 클래 스내 상관행렬, 상관 기반 분리 행렬을 각각 구성하였다.
상관 기반 분리 행렬의 누적분포함수를 구하여 상위 확 률에 응답하는 값을 구하였고, 실험 결과 레이다 신호의 클래스 분리도를 정확히 추정하는 것으로 나타났다. 제안 된 방법의 경우 기존 방법인 LDA에서의 특이점 문제나 바타차야 거리의 분포도 문제가 발생하지 않기 때문에 레이다 신호의 분리 능력 측정에 있어 더 광범위하게 활 용될 수 있을 것으로 사료된다.
References
[1] E. Choi, C. Lee, "Feature extraction based on the Bhatta- charyya distance," in IGARSS 2000, IEEE 2000 Inter- national Geoscience and Remote Sensing Symposium, Honolulu, Jul. 2000, vol. 5, pp. 2146-2148.
[2] T. Kailath, "The divergence and Bhattacharyya distance measures in signal selection," IEEE Transactions on Com- munication Technology, vol. 15, no. 1, pp. 52-60, Feb. 1967.
[3] J. Novovicova, P. Pudil, and J. Kittler, "Divergence based feature selection for multimodal class densities," IEEE Transactions on Pattern Analysis and Machine Intelli- gence, vol. 18, no. 2, pp. 218-223, Feb. 1996.
[4] K. A. Lee, C. H. You, H. Li, T. Kinnunen, and K. C.
Sim, "Using discrete probabilities with Bhattacharyya measure for SVM-based speaker verification," IEEE Tran- sactions on Audio, Speech, and Language Processing, vol. 19, no. 4, pp. 861-870, May 2011.
[5] R. Nielsen, R. Nock, "On the Chi square and higher- order Chi distances for approximating f-divergences," IEEE Signal Processing Letters, vol. 21, no. 1, pp. 10-13, Jan.
2014.
[6] P. N. Belhumeur, J. P. Hespanha, and D. J. Kriegman,
"Eigenfaces vs. fisherfaces: Recognition using class spe- cific linear projection," IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 19, no. 7, pp.
711-720, Jul. 2013.
[7] M. Fukunaga, Introduction to Statistical Pattern Recog- nition, 2nd ed. New York, Academic Press, 1990.
[8] S. Theodoridis, K. Koutroumbas, Pattern Recognition, New York, Elsevier Academic Press, 1999.
[9] R. O. Duda, P. E. Hart, and D. G. Stork, Pattern Classi- fication, 2nd ed. New York, John Wiley & Sons, 2001.
[10] V. C. Chen, M. Martorella, Inverse Synthetic Aperture Radar Imaging: Principles, Algorithms and Applications (Electromagnetics and Radar), IET/Scitech, 2014.
[11] C. Ozdemir, Inverse Synthetic Aperture Radar Imaging with MATLAB Algorithms, New York, John Wiley &
Sons, 2012.
[12] Virtual Aircraft Framework for RCS/IR analysis and mi- tigation(VIRAF). Available: http://www. idscorporation.com.
정 성 재
2010년 2월: 동국대학교 전자공학과 (공학 사)
2012년 2월: 동국대학교 전자전기공학과 (공학석사)
2015년 9월~현재: 포항공과대학교 전자 공학과 박사과정
[주 관심분야] 다중 편파 ISAR 영상 및 표 적 식별, 다중편파 보상 알고리즘
이 승 재
2012년 2월: 한양대학교 전자및통신공학과 (공학사)
2014년 2월: 포항공과대학교 전자전기공학 과 (공학석사)
2014년 3월~현재: 포항공과대학교 전자 전기공학과 박사과정
[주 관심분야] 레이다 표적 인식, 레이다 영상, 레이다 신호처리, 패턴인식
김 경 태
1994년 2월: 포항공과대학교 전자전기공 학과 (공학사)
1996년 2월: 포항공과대학교 전자전기공 학과 (공학석사)
1999년 2월: 포항공과대학교 전자전기공 학과 (공학박사)
2002년 3월~2011년 2월: 영남대학교 전 자공학과 교수
2011년 3월~현재: 포항공과대학교 전자전기공학과 교수 2012년 9월~현재: 레이다/IR 표적식별 특화연구실 실장 [주 관심분야] 레이다 표적인식, 레이다 영상, 레이다 신호처리,
패턴인식, 전자기수치해석 및 RCS 측정