* 서울과학기술대학교 기계시스템디자인공학과
Design and Control of Hybrid a Powered Wheelchair for the Elderly
Tae-Su Yoon*
, Sung-Jo Ann*
, Sang-Min Kim*
, Young-Bin Han*
and Jung-Yup Kim*†
* Dept. of Mechanical System Design Engineering, Seoul Nat’l Univ. of Science and Technology (Received April 7, 2016 ; Received September 18, 2016 ; Accepted September 22, 2016)
1. 서 론
전 세계적으로 많은 국가들이 고령사회로 접어 들면서 65세 이상의 노인 인구가 급격히 늘어나고
있다 . 2011년 대한민국 통계청 자료에 따르면 65세 이상 인구 비율은 13.1%를 차지하며 2037년에는 전체인구의 30.1%를, 2060년에는 전체인구의 40.1%
에 달할 것으로 전망되고 있다. 고령인구의 증가 로 인하여 신체 노화 및 각종 질병에 대한 대책 중 한 가지로써 휠체어의 수요가 증가하고 있다.
그런데 근력이 부족한 하지 장애 고령자들은 수동
Key Words: Hybrid Powered Wheelchair(하이브리드형 휠체어), The Elderly(고령자), Brake Mechanism(브레이크메커니즘 ), Control Algorithm(제어 알고리즘)
초록: 본 논문은 고령자를 위한 하이브리형 전동 휠체어의 개발에 대해서 서술하였다. 개발된 하이브리 드형 휠체어는 기존 전동 휠체어에 비해 기구적 및 제어적 특징을 가지고 있다. 기구적 특징으로써 인 체공학적 등받이 브레이크 메커니즘을 새롭게 고안하였고, 이로부터 고령자들이 몸동작을 이용하여 손 쉽게 제동을 할 수 있도록 하였다. 제어적 특징으로써, 휠 토크 보조, 마찰/관성보상, 중력보상 및 한 손 구동과 같은 다양한 동력보조 기능을 융합하여 고령 탑승자의 근력 부담을 현격히 감소시켰다. 휠 토크 의 보조를 위해 핸드림에 스트레인게이지를 부착하여 탑승자가 가하는 휠 토크를 측정하였으며, 마찰 보상과 관성보상을 위해 바퀴와 시트에 각각 자이로스코프와 가속도센서를 부착하였다. 또한, 중력보상 을 위해 기울기 센서를 추가적으로 부착하였으며, 편마비 환자들과 같이 한 손 만을 사용할 수 있는 사 용자들 위해서 시트 밑면에 부착된 압력 센서로부터 휠체어의 주행 방향을 인식하고 자이로스코프를 이 용하여 반대편 휠의 각속도를 제어하는 한 손 주행 알고리즘을 새롭게 고안하였다. 최종적으로 본 연구 에서 고안한 운동 보조 알고리즘의 성능을 각종 실험으로부터 검증하였다.
Abstract: This paper describes the development of a hybrid-powered wheelchair (HPW) for the elderly. The proposed
HPW has novel mechanical and control features compared with conventional powered wheelchairs. An ergonomic back-braking mechanism was designed in order to stop the wheels easily. In terms of control features, the HPW remarkably reduces the muscle power required by combining various assistive functions, such as wheel torque assistance, friction/inertia compensation, gravity compensation, and the one-hand driving algorithm. For wheel torque assistance, strain gauges were attached to the hand-rim in order to measure the wheel torque applied by a human.
Gyroscopes and an accelerometer were attached to the wheel and chair respectively for friction and inertia compensation. An inclinometer was attached for gravity compensation and the one-hand driving algorithm was included for patients who can only use one hand. The one-hand driving algorithm controls the angular velocity of the uncontrolled wheel by using a gyroscope and pressure sensors attached to the bottom of the seat. Finally, the performance of the proposed motion assisted algorithm was verified through various experiments.
† Corresponding Author, [email protected]
Ⓒ 2016 The Korean Society of Mechanical Engineers
휠체어를 이용하기에 부담이 적지 않아 값비싼 전 동 스쿠터를 사용하게 된다(Fig. 1 참고). 이러한 제품들은 순수 전동력으로 이동하므로, 탑승자의 신체적 운동이 불가하여 건강에 도움이 되지 않으 며 에너지 소모가 높고 무거운 단점이 있다. 따라 서 고령 탑승자가 스스로 근력운동을 병행 할 수 있도록 근력 일부를 보조해 주는 컴팩트한 하이브 리드형 전동 휠체어의 필요성이 대두되고 있다.
기존 수동형 휠체어의 바퀴를 인휠 모터로 교 체한 하이브리드 형태의 전동 휠체어 연구는 이미 오래 전부터 진행되어왔다. Cooper, R. A. 등의 연구 진이 인휠 모터를 장착한 휠체어의 제어방법을 연 구하였고, (1) Yuusuke, O. 등은 손의 근전도 신호를 이용한 인휠 모터 장착형 휠체어를 연구 개발하였 다. (2) 대만의 National Cheng Kung University의 Ou, C. C. 등은 Lyapunov torque observer를 이용한 동력 보조 휠체어를 설계하였다. (3) 국내에서도 이러한 연구들이 진행 되었으며 인덕대학교의 공정식 등 은 근력 부담을 줄여 고령자의 근력 증진을 도와 주는 휠체어 제어기에 대한 수학적 모델링을 수립 하고 검증하였다. (4) 가천대학교의 김보성 등은 구 동형 휠체어의 두 바퀴 축 내부에 장착이 가능한 인휠 AC서보모터를 장착하여 경사로와 평지에서 근력의 부담을 줄여주는 휠체어를 설계 하였다. (5) 또한 인휠 모터 장착형 휠체어에서 탑승자가 핸드 림에 가하는 토크를 파악하는 방법에 대한 연구도 진행되고 있다. 홍응표 등은 토션 스프링을 이용 하여 핸드림에 가해지는 토크의 측정이 가능한 인 휠 모터를 개발하였다. (6) 하지만 현재까지 연구 개 발 및 상용화되고 있는 근력 보조형 하이브리드 휠체어의 경우 대부분 핸드림에 가해지는 토크의 증폭과 경사로에서의 중력 보상에 국한된 기능을 가지고 있다. 또한, 핸드림에 가하는 탑승자의 토 크가 수학적 모델에 의해 간접적으로 예측되거나 스프링 요소로부터 측정되어 반응속도와 정확도가 낮았다 .
본 연구에서는 위에서 언급된 단점을 보완하여
고령자들이나 편측 마비 환자들이 운동을 병행하 면서 보다 부담 없이 사용할 수 있는 하이브리드 전동 휠체어(Hybrid Powered Wheelchair : HPW)를 개발하였다 . 개발된 HPW는 Fig. 2와 같이 기존 하 이브리드 전동 휠체어와 같이 인휠 모터를 장착하 였으나 , 더욱 다양한 근력 보조 알고리즘을 구현 하였다. 특히, 스트레인게이지를 직접 핸드림에 부 착하여 림토크를 더욱 정확하게 측정할 수 있도록 하였다 . 근력보조 알고리즘으로써 근력보상, 중력 보상, 마찰보상 및 관성보상을 구현하였으며, 편측 마비 환자와 같이 한 팔만을 사용할 수 있는 환자 들을 위하여 한 손으로도 휠체어를 자유롭게 이용 할 수 있는 특수 기능도 제안하였다. 이러한 근력 보조 기능 이외에도 인체공학적 브레이크 메커니 즘을 고안하여 탑승자가 브레이크를 적은 힘으로 도 쉽게 작동시켜 안정적인 휠체어 이용이 가능하 도록 하였다.
2. 기구 메커니즘 설계
2.1 치수 및 사양
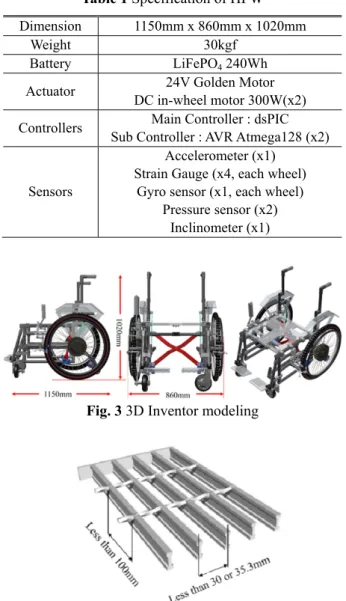
하이브리드 휠체어는 기존의 수동형 휠체어의 프레임 구조를 기반으로 설계하였다. Fig. 3과 Table 1을 통해서 휠체어의 전반적인 외형과 사양 을 확인 할 수 있다. 휠체어의 치수는 휠체어의 인체측정학적 평가 및 디자인을 참고하여 성인 남 성에 적합하도록 치수를 결정하였다. (7) 프레임의 경우 , 경랑화된 알루미늄 파이프 프레임의 조합을 통해 수동형 휠체어의 프레임 구조를 구성하였다.
총 5가지의 종류의 센서로부터 인터페이스를 구 성하였고, 2가지 종류의 마이크로 컨트롤러를 사용 하여 빠른 연산처리가 가능하도록 하였다. 300W 인휠 모터 2개를 사용하여 충분한 토크가 생성될 수 있도록 하였으며, 리튬인산철 배터리로부터 약 5시간의 사용이 가능하도록 하였다. 최종적으로
Fig. 2 Conceptual design of HPW Fig. 1 Manual wheelchair and electric scooter
30kgf 중량의 경량화된 하이브리드 전동 휠체어를 제작하였다 .
2.2 안전성이 고려된 앞 바퀴 설계
Fig. 4는 도로 상에서 흔히 볼 수 있는 그레이 팅 커버(배수구 덮개)의 일반적인 규격을 나타낸 다. 일반적으로 휠체어에 쓰이는 캐스터 앞 바퀴 지름은 130 mm이고 폭은 30~40 mm 이하로 제작 된다. 따라서 주행 도중 배수구 덮개에 휠체어의 앞 바퀴가 빠져 탑승자가 전방으로 쓰러지게 되는 사고가 발생할 위험이 있다. 따라서 본 하이브리 드형 휠체어의 앞 바퀴는 빠짐으로 인한 사고를 방지하기 위한 설계가 적용되었다. Fig. 5와 같이 앞 바퀴의 구조는 기존의 수동형 휠체어의 앞 바 퀴와 같이 회전형 캐스터의 구조를 사용하여 조향 역할을 하도록 하였으며, 앞 바퀴의 양쪽에는 바
퀴보다 작은 MC나일론 소재의 지름 100 mm의 보 조 바퀴(파란색 부분)를 설계하여 바퀴가 완전하 게 빠지는 것을 방지하고 손쉽게 벗어 날 수 있도 록 설계하였다.
2.3 인체공학적 등받이 브레이크
기존의 수동형 휠체어는 제동을 위한 브레이크 메커니즘이 존재한다. 그러나 탑승자가 휠체어를 이용할 때에는 핸드림을 잡고 있기 때문에 브레이 크를 통해 제동을 할 수 없다. 따라서 안전한 제 동을 위해서 인체공학적 등받이 브레이크 메커니 즘을 고안하였다. Fig. 6은 등받이 브레이크 메커니 즘의 원리를 나타내며, 등받이 프레임에 오렌지색 화살표 방향으로 탑승자가 등을 기대어 뒤로 밀어 줌으로써 브레이크를 작동시키는 구조이다.
등받이 프레임의 B부분에는 샤프트가 연결되어 있다 . 이 샤프트는 사이드가드에 설계된 이동 통 로 궤적을 따라서 움직이며 등받이 브레이크의 작 동 구간을 제한하게 된다. 또한, 프레임과 캘리퍼 브레이크의 와이어가 샤프트를 통해 연결되며 등 받이와 브레이크의 작동이 연동되도록 하였다. 프 레임 내부에는 A와 샤프트를 인장 스프링으로 연 결하여 설정된 힘 이상의 하중이 등받이에 작용 되어야만 브레이크가 작동 하도록 설계하여 단순 히 등받이에 기대는 것으로 브레이크가 작동되는 것을 방지하였다. 또한, 등받이 브레이크는 링크
Fig. 5 Design of caster wheel
Fig. 6 Design of backrest
Sub Controller : AVR Atmega128 (x2)
Sensors
Accelerometer (x1) Strain Gauge (x4, each wheel)
Gyro sensor (x1, each wheel) Pressure sensor (x2)
Inclinometer (x1)
Fig. 3 3D Inventor modeling
Fig. 4 Standard of steel grating cover
구조를 통해 발 받침대와 연동되어 있다. Fig. 7은 등받이 프레임과 발 받침대 메커니즘의 설계를 나 타낸다. 사용자가 등받이 브레이크를 이용하여 제 동을 할 경우 등받이가 뒤로 젖혀짐과 동시에 앞 쪽의 발 받침대가 위로 상승하게 된다. 따라서 각 링크의 연결 부위에는 베어링을 장착하여 원활한 회전운동이 가능하도록 설계하였다. 이 메커니즘 은 급제동으로 인해 관성력이 전방으로 작용할 때 탑승자의 다리가 안전 지지대의 역할을 할 수 있 도록 하며, 회전질량관성모멘트를 늘려서 피칭 모 션을 방지해주는 인체공학적인 메커니즘이다.
2.4 한 손 브레이크
기존의 수동형 휠체어의 브레이크 시스템은 양 쪽에 부착되어 독립적으로 작동되었다. 주로 휠체 어의 주차용도로 사용되며 제동을 위해 사용 할 경우 동시에 작동하기 어려워 2차 사고를 유발 할 수 있다. 따라서, 본 연구에서는 양쪽의 핸드 브레 이크를 서로 와이어로 연결하여 한 손으로 브레이 크를 작동 시킬 때, 양 쪽이 동시에 제동 되는 한 손 브레이크를 설계하였다.
본 메커니즘의 장점은 주행 중에 핸드 브레이 크를 사용할 수 있으며, 몸의 일부를 움직일 수 없는 편측 마비 환자들도 휠체어를 올바르게 제동 할 수 있도록 도와준다. Fig. 8의 A 부분에는 와이 어 연결을 위한 알루미늄 블록을 고안하였다. 이
를 통해 와이어의 경로를 직각으로 구성하여 브레 이크에 작용하는 힘이 더 효율적으로 제동력을 발 휘하도록 하였다.
2.5 접이식 메커니즘 설계
보관 시 공간 절약을 위해 Fig. 9에 있는 중앙의 X자형 프레임(center link)을 설계하여 접이식 메커 니즘을 설계하였다. 휠체어의 의자를 위 방향으로 당기면 휠체어 본체의 각 조인트와 링크들이 연동 하여 휠체어가 부드럽게 접힐 수 있도록 하였다.
또한 , X자형 프레임이 회전관절(swivel)과 연결되는 부분에는 구리 재질의 인서트(insert)를 사용하였다 (Fig. 10 참고). 따라서, 인서트 자체의 윤활성을 이 용하여 각 부품 간의 마찰을 줄이고 메커니즘의 원활한 구동이 되도록 하였다.
Fig. 9 Folding mechanism & assembly design
Fig. 10 Design of center link
Fig. 11 Design of swivel & slider Fig. 7 Design of back-front mechanism and revolute joint
Fig. 8 Design of one hand brake system
Fig. 12 Photograph of the developed HPW
Fig. 11의 회전관절(swivel)과 슬라이더(slider), 지 지블록 (support block)은 X자형 프레임과 휠체어 프 레임을 연결(A-a, B-b)하고 베어링 구조를 통한 회 전과 미끄러짐이 가능하도록 한다. 슬라이더 내부 에는 미끄러짐을 위한 폴리아세탈 튜브를 삽입하 였다. 이로부터 휠체어 본체 프레임을 가이드로 슬라이더 바디(slider body)가 부드럽게 미끄러지도 록 하였다. 폴리아세탈은 열가소성 수지 중에서도 내마모성 및 내열성 등이 우수하며 자기 윤활성이 뛰어나기 때문에, 휠체어 프레임과의 마찰에도 변 형이 적고 접이식 메커니즘의 구동에 적합하다.
Fig. 12와 같이 HPW의 설계 이후 접이식 메커니 즘의 구동을 확인하였다.
3. 전장부 설계
3.1 모터선정
일반적으로 휠체어를 사용할 때, 최대 토크를 필요로 하는 구간은 경사로 구간이다. 따라서 지 정 되어 있는 경사로 규격에서 큰 중량에 대한 동 력보조가 가능한 모터를 선정하였다. 보건복지부 의 경사로 규격에 따르면 장애인 편의시설 경사로 의 기울기는 18분의 1(3.17°)에서 12분의 1(4.76°) 의 사이로 지정되어 있다. 하지만 실생활에서 대 다수의 경사로가 약 7도의 경사를 가지고 있었다.
따라서 , 본 연구에서는 약 7도의 기울기에서 기본 휠체어의 무게를 포함한 90 kg에 가해지는 힘에 대한 토크를 기준으로 모터를 선정하였다. 위의 경사로 조건에서 1.3의 안전계수를 반영하여 경사 로에서 미끄러지지 않기 위해 필요한 바퀴의 접선 력을 계산하면 약 150 N이 도출된다. 이러한 설계 조건에 따라 각 바퀴는 75 N의 접선력을 보조 할 수 있는 토크를 발생시킬 수 있어야 한다.
위의 설계 조건에 따라서 골든모터(Golden Motor) 사의 24V, 300W 정격 용량의 24인치 직류 인휠 모 터를 선정하였다. 본 인휠 모터에서 75 N의 접선 력은 약 22.5N·m의 토크를 발생시키며 모터의 토
크상수(1.81Nm/A)에 의하여 12.5 A의 전류를 필요 로 한다. 최종적으로 모터는 약 300 W의 최대 파 워가 필요로 하게 되며 선정된 모터가 필요 사양 에 적합하다는 것을 알 수 있다.
3.2 회로 구성
Fig. 13의 제어 시스템은 바퀴측정부, 주제어기, 모터구동부 및 본체측정부로 나뉜다. 주 제어기로 써 마이크로칩사의 dsPIC를 사용하였고, 모터제어 기는 로보큐브테크사의 DC2408DID를 사용하였다.
바퀴측정부의 AVR이 각속도 센서와 스트레인게이 지를 통해 실시간으로 각 바퀴의 각속도 및 토크 를 측정하며 블루투스 통신을 통해 주제어기와 통 신한다 . 기울기센서, 가속도 센서 및 압력센서로 이루어진 본체 측정부는 탑승여부, 기울기, 가속도 를 측정한다. 메인 제어기에서는 1kHz의 제어 주 파수로부터 각 측정부의 센서 값을 기반으로 각 상황에 적합한 토크를 계산하고 보조한다.
4. 제어 알고리즘
4.1 휠체어 운동 제어 알고리즘 순서도
Fig. 14는 휠체어의 동작을 결정하는 운동제어 알고리즘의 순서도를 나타낸다. HPW의 전원을 인 가하면 이용자는 탑승자의 몸무게와 한 손 또는 양 손 작동 모드를 선택하게 된다. 초기 선택 과 정은 1회만 시행되며 선택 과정 이후에 HPW는 대기 상태에서 탑승자의 탑승을 기다리게 된다.
대기 또는 작동 상태는 의자의 밑에 부착된 압력 센서를 통해서 판별을 한다. 탑승자가 탑승을 하 면 휠체어의 상태를 파악하기 위한 센서 데이터의 수신과 계산이 진행된다. 바퀴측정부의 마이크로 컨트롤러를 통하여 바퀴의 동적 상태를 전달 받으 며 주 제어기의 아날로그-디지털 컨버터를 통해 본체의 동적 상태를 파악한다. 탑승자가 이동을 위해 핸드림에 토크를 가하게 되면 HPW는 선택
Fig. 13 System block diagram
된 작동 모 키게 된다.
립적으로 토 태에 따라 는 의자 밑 고 각 바퀴 대한 필요 필요 토크에
각 바퀴에 (1)과 같이
위의 식에 기능을 나타 모터 토크를 모터 제어기 의 상세한 설
4.2 근력보 휠체어 각 이지가 부착 지를 통해
(τ 를
모터를 구동
Fig. 1모드와 동적 상 양 손 주행 토크가 작용하
토크를 계산 의 압력센서 퀴에 필요 토
토크를 계산 에 해당하는 에 가해지는 모
도출된다.
에서 네 개의 타내며 센서
를 계산한다.
기의 전류 제 설명은 아래 보조 토크(
각 바퀴의 핸 착되어 있다(F
탑승자가 파악하고 이 동함으로써 탑
4 Flow chart o
상황에 따라 행 모드에서는
하는 방향과 산한다. 한 손
를 통해 방향 토크를 계산한 산 한 후 모터 전류를 인가 모터 토크는
의 항은 각기 피드백에 의 계산된 필요 제어로부터 발
와 같다.
드림에는 4개 Fig. 15 참고
핸드림에 이를 식 (2)와 탑승자의 근력
of the working
라 모터를 동작 는 각 바퀴는
모터의 동적 손 주행 모드에
향변수를 계산 한다. 각 모터 터제어기를 통 가하게 된다.
는 기본적으로
다른 동력보 의한 정확한 필 요 모터 토크 발생된다 . 각
개의 스트레인 고 ). 스트레인게 가하는 토 와 같이 증폭하 력을 보조한다
g algorithm 작시 는 독 적 상 에서 산하 터에 통해 로 식
(1) 보조 필요 크는 각 항
인게 게이 토크 하여 다.
F
4 마 위해 인가 림으 때 , 서를 토크 으로 피로
4 휠 경사 적인 는 같이 기울 식 토크
Fig. 15 Sen
Fig. 16 Free b
4.3 마찰보상 마찰보상은 휠 해 각속도에 가한다. 이를 으로 이동할
휠의 각속도 를 사용하여 크를 생성한다 로써 탑승자에 로와 부담을
4.4 중력보상 휠체어는 몸체 사로에서 휠체 인 토크를 보
경사로에서 이 수월하게 울기는 기울기
(4)의 경사로 크를 계산하여
nsing of whee
body diagram o
∙
토크(
휠체어 바퀴의 비례하여 추 통해서 탑승 수 있는 거 도 ( )는 휠 중
측정하며 식 다. 1회 굴림 에게 굴림의
줄여 줄 수
∙
토크(
체의 보편적 체어와 탑승 보조해준다. 중
미끄러져 내 경사로를 이 기 센서로부 로에서의 역학 여 보조해 준
el torque and v
of gravity com
)
의 점성마찰 추가적인 토크 승자가 1회의
리가 증가하 중심에 장착된
식 (3)과 같이 림 당 이동거
반복으로 인 있다.
)
기울기( )를 자의 중력에 중력보상을 통 내려가지 않으 이동 할 수 부터 측정되며
학적 계산을 준다 .
velocity
mpensation (2
을 보상하기 크를 모터에 의 핸드림 굴 하게 된다. 이 된 자이로 센 이 마찰 보상 리가 증가함 인한 근력의
(3)
를 측정하여 에 대한 추가 통해 휠체어 으며 평지와 있다. 몸체 며 , Fig. 16과 을 통해 필요 2)
굴 센 상 함
)
가
와
과
요
화가 발생하는 구간에서는 휠체어와 탑승자의 무 게와 가속도에 비례한 관성력이 작용하며 탑승자 의 근력에 큰 부담을 줄 수 있다. 따라서, 가속도 센서를 통해 전진 시에 발생하는 가속도( )를 측 정하고 가속도의 방향이 휠체어의 전방으로 작용 할 때 이에 비례하는 추가적인 토크를 발생시킨다.
식 (5)처럼 추가 토크에 바퀴의 속도에 따른 가중 치를 적용하여 필요 모터 토크를 계산한다. 이를 통해서 출발 시와 같은 관성 작용 구간을 쉽게 벗 어나게 된다. 이 기능을 통해서 탑승자는 휠체어 의 동적 상태에 관계 없이 균일한 힘으로 휠체어 를 이용할 수 있다.
| | ∙ (5)
4.6 한 손 주행 제어 알고리즘
통상적으로 수동형 휠체어는 두 손을 이용해 전 진 , 후진 및 방향 전환을 할 수 있다. 하지만 편측 마비 환자와 같이 한 손을 이용할 경우에는 두 손 과 같은 휠체어 구동이 불가능하다. 한 손 주행 제어 알고리즘은 의자 밑 좌우에 부착된 두 개의 압력센서 (FSR)로부터 탑승자의 무게중심의 위치를 파악하고 무게 중심의 위치를 통해서 탑승자는 휠 체어 진행 방향을 제어한다. 참고로 아래 식들은 탑승자의 왼팔이 마비되었을 경우를 가정한다.
0.3 0.3 6
∙ 0.3 0.3 7 where
좌우 10도로 몸을 기울였을 때, 방향변수(DIR) 는 우측의 경우 0.3 m이며, 좌측의 경우 -0.3 m에 해당한다 . 따라서, 안정적인 주행을 위하여 좌우 10도를 주행 방향 판별 기준 각도로 선정하였다.
방향 변수의 값이 0.3 m 이내의 구간에 해당 할 때 , 직진 구간으로 인식하며 식 (7)의 직진 알고리 즘을 수행한다. 그 이외의 구간에서는 회전 구간 으로 인식하며 속도에 대한 비례 적분 제어를 수 행하지 않고 식 (8)과 같이 토크제어를 하게 된다.
5. 구동 실험 및 데이터 분석
위에서 제안된 구동 알고리즘을 본 로봇에 적용 한 후 하이브리드형 휠체어가 근력 보조에 효과가 있는 지를 검증하기 위하여 EMG 센서를 이용하 여 알고리즘 유무에 따른 근력 변화를 측정하였다.
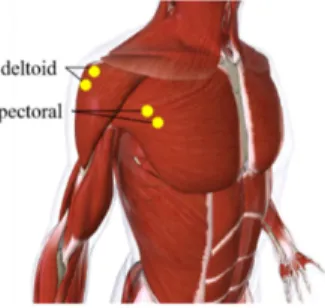
EMG 센서 실험은 BTS 바이오엔지니어링사의 계 측장비를 사용하였으며, 휠체어의 추진 시 추진기 에 주동근으로써 작용하는 삼각근, 대흉근에 센서 를 부착하여 진행하였다. (8) 참고로, Fig. 18에 EMG 센서의 부착 위치를 나타내었다. 또한 핸드림에 부착된 스트레인게이지와 HPW의 각속도 센서, 가 속도 센서를 이용하여 물리적 값을 측정함으로써 각 보상 기능의 성능을 분석하였다.
5.1 근력 보조 실험
핸드림에 가해지는 토크를 보조해주는 근력 보 상 기능의 유무에 따른 차이를 비교하기 위해 근 전도 신호와 핸드림 토크를 측정하였다. 평지에서 총 5회의 휠 굴림을 시행하여 각 근육 별 근전도 와 핸드림 토크를 측정하고 근전도 및 토크의 RMS 수치를 Fig. 19에 나타내었다. 근력 보상 기
Fig. 18 EMG sensor position for the arm Fig. 17 FSR sensors and direction variable
능이 없이 평지에서 주행 했을 때, 삼각근과 대흉 근의 근전도 신호의 RMS 값은 각각 0.05, 0.045 mV 로 측정되었으며 왼쪽과 오른쪽 핸드림에 측 정된 토크의 RMS 값은 각각 3.462, 3.209 Nm로 측 정되었다 . 근력 보상 기능을 사용하여 주행하였을 때, 삼각근과 대흉근 근전도의 RMS 값은 각각 0.041, 0.035 mV로 측정되었으며, 왼쪽 핸드림과 오
른쪽 핸드림에 측정된 토크 RMS 값은 각각 1.495, 1.977 Nm로 측정되었다. 각 근육별로 근전도 RMS 값의 증감율을 계산하면 위와 같은 순서대로 -17%, -21% 만큼 감소한 것을 알 수 있다. 또한 토크 RMS 값의 증감율을 계산하면 왼쪽 토크 RMS는 -56%, 오른쪽 토크 RMS는 -38% 만큼 근력이 감 소한 것을 알 수 있다. 평균적으로 근전도 신호는 -19% 감소하였고, 핸드림에 가해지는 토크는 -47%
의 감소 효과를 확인하였다. 참고로, 왼손과 오른 손의 림 토크 보조 차이가 있는 것은 피실험자가 오른손잡이이므로 왼손 토크 보조 정도가 더 높게 설정되었기 때문이다.
5.2 중력 보상 실험
경사로에서 중력으로 인한 미끄러짐을 방지하 고 근력을 보조해 주는 중력보상 기능의 효과를 확인 하기 위하여 EMG 센서를 통한 근전도 신호 측정과 핸드림 토크 측정을 진행하였다. 5도 경사 와 2m의 길이 조건의 경사로를 이동하는 동안의 근전도와 토크를 측정하고 그 RMS 수치를 Fig. 20 에 나타내었다.
중력보상 기능 없이 경사로를 주행 했을 때, 삼 각근과 대흉근의 근전도 RMS 값은 각각 0.049, 0.054 mV로 측정 되었다. 스트레인게이지를 통해 측정한 왼쪽과 오른쪽 핸드림 토크의 RMS 값은 각각 3.723, 3.506 Nm로 나타났다. 반면에 중력보상 기능을 통해 경사로를 이동할 때, 삼각근과 대흉 근의 근전도 RMS 값은 각각 0.031, 0.025 mV로 측 (a) EMG signals of deltoid
(b) EMG signals of pectoral
(c) RMS values of EMG signals
(d) RMS values of both handrim torques
Fig. 19 Comparison with or without handrim torque assisttime[s]
1 2 3 4 5 6 7 8 9 10
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3
0.4 Without assist
With assist
deltoid pectoral
0 0.01 0.02 0.03 0.04 0.05
R M S val ue of E M G si gn al s[ m V ] Without assist
With assist
Left handrim Right handrim
0 0.5 1 1.5 2 2.5 3 3.5
R M S v alue o f bo th ha nd rim t or qu es [Nm ]
Without assist With assist
(a) RMS values of EMG signals
(b) RMS values of both handrim torques
Fig. 20 Comparison with or without gravity compensationdeltoid pectoral
0 0.01 0.02 0.03 0.04 0.05 0.06
R M S va lu e of E M G si gn al s[ m V ] Without assist
With assist
Left handrim Right handrim
0 0.5 1 1.5 2 2.5 3 3.5 4
R M S v al ue of bo th handr im t or ques [N m ]
Without assist
With assist
정되었으며, 1.1, 1.76 Nm 산하면 삼각 였으며 , 핸드 은 -70%, 오 따라서 평균 였으며 핸드 을 확인하였 5.3 마찰보 마찰보상은 때까지 소요 능에 따른 요 시간을 무에 따른 능 없이 5회 시간은 2.64 을 통해 실 로 측정되었
Fig. 21 Com
-50 2
, 토크 RMS m로 측정되었 각근은 -36%
드림에 가해지 오른쪽은 -49%
균적으로 근전 드림에 가해지 였다 .
보상 실험 은 휠 굴림을 요되는 평균시 속도의 변화 계산하여 Fig 구간 평균 시 회 휠 굴림을
4초로 측정되 험을 했을 때 었다. 이를 통
mparison with
4 6 8
S값은 왼쪽과 었다 . 이를 통
%, 대흉근은 지는 토크의
% 감소한 것 전도 신호는 지는 토크는
을 시행하여 시간을 측정하 화 추이를 측
g. 21과 같이 시간을 비교하 을 시행 했을 되었다. 반면
때 , 평균 소요 통해 +56%의 h or without fri
Fig.
10 12 14
time[s]
과 오른쪽 각 통해 증감율을
-53%가 감소 RMS값은 왼 것을 알 수 있
-44.5% 감소 -59.5% 감소
속도가 영이 하였다 . 보상 정하고 평균 이 보상기능의 하였다. 보상 을 때, 평균 소
마찰 보상 기 요시간은 4.1
평균 소요시 iction compens
23 Snapshot o
4 16 18
W W
각각 을 계
소하 왼쪽 있다.
소하 소함
이 될 상 기 균 소 의 유 상 기 소요 기능 13초 시간
의 5 관 비교 하였 하고 여 가속 경우 정되 경우 었다 상을 따라 성력 수
5 F sation
Figof a combinat
20 22
ithout assist ith assist
증가를 확인 5.4 관성보상 관성보상은 출 교하여 관성보 였다. 총 3회 고 세 구간에 Fig. 22와 같 속도를 비교 우 가속도 최 되었다 . 하지 우 가속도 최 다 . 측정 값을 을 통해 가속 라서, 탑승자 력을 관성 보
있다.
5.5 한 손 주 Fig. 23은 한
g. 22 Comparitional locomot
인하였다.
실험
출발 시 발생 보상을 통한
의 양의 방 에서 가속도 최
같이 관성보상 하였다 . 관성 최대값의 평균 만 관성보상 최대값의 평균
을 통해 증감 속도가 +38%
자가 자신과 보상으로부터
행 구동 실험 손 주행 구 ison with or wi
tion (9)
생하는 가속도 한 동력보조 성 향 출발 가속 최대값의 평 상 기능의 유 성보상 없이 균 값은 0.217 상 기능을 통
균은 0.3 ⁄ 감율을 계산하
% 증가함을 휠체어 무게
경감시킬 수
험
구동 영상의 스 ithout inertia c
도의 크기를 성능을 확인 속도를 측정 균을 산출하 유무에 따른 출발을 할 7 ⁄ 로 측 통해 출발 할 로 측정되 하면 관성보 알 수 있다.
게에 의한 관 수 있음을 알
스냅샷을 보 compensation
를
하 른 할 측 할 보 . 관 알
보
여준다. 탑승자는 왼팔이 마비되었다고 가정하였 으며, 오른손으로 바퀴를 밀면서 동시에 몸을 좌 우로 기울여 방향을 조절하였다. 몸의 기울어진 정도와 방향에 따라 휠체어의 진행 방향을 조절할 수 있었으며, 시작점에서 출발하여 우회전과 좌회 전을 1회 진행하고 제자리 회전을 하여 다시 좌회 전과 우회전을 통해 시작점으로 돌아오는 실험을 성공적으로 수행하였다. (9)
6. 결 론
본 연구에서는 로봇 기술들을 접목하여 탑승자의 상지 근육에 대한 부담을 효과적으로 완화가능한 동력보조 휠체어를 개발하였다. 수동형 휠체어의 프레임 구조에 인휠 모터 전동 요소를 결합하였으 며, 인체공학적 등받이 브레이크, 한 손 브레이크 및 캐스터 보조바퀴를 통해 안전하게 휠체어를 이 용할 수 있도록 설계하였다. 휠체어의 운동 제어 알고리즘을 통해 더욱 고차원적이고 효율적인 동력 보조가 가능하며, 탑승자는 평지와 같은 힘으로 일 정하게 휠체어를 이용할 수 있도록 하였다. 또한 마찰보상을 통한 휠체어 휠 굴림 주기의 증가로 근 육의 피로도를 줄였으며, 특히 이전에 근력의 감소 로 인해 휠체어를 이용할 수 없었던 고령자들은 동 력보조 기능을 통해 더욱 쉽고 편리하게 휠체어를 이용할 수 있도록 하였다. 또한, 개발된 하이브리드 형 휠체어는 한 손 주행 모드를 통해 휠체어는 두 손이 온전해야 한다는 기존의 통념을 깨고 편측 마 비 환자들과 같이 한 손만을 사용할 수 있는 환자 들도 휠체어를 이용할 수 있도록 하였다.
향후에는 험지 주행 안정성과 에너지 효율 등을 개선한 알고리즘에 대하여 연구할 것이며 장기적 으로 학습 알고리즘을 통한 사용자 조작 이질감의 개선에 대해서 연구할 것이다.
후 기
본 연구는 서울과학기술대학교 교내 연구비의 지원으로 수행되었음.
참고문헌