UAV를 이용한 돔형 원자력 격납건물 외관조사를 위한 3차원 모델기반 비행 좌표 생성 방법
3-D Model-based UAV Path Generation for Visual Inspection of the Dome-type Nuclear Containment Building
김봉근
1)Kim, Bong-Geun
1)Received September 8, 2015; Received March 15, 2016 / Accepted March 15, 2016
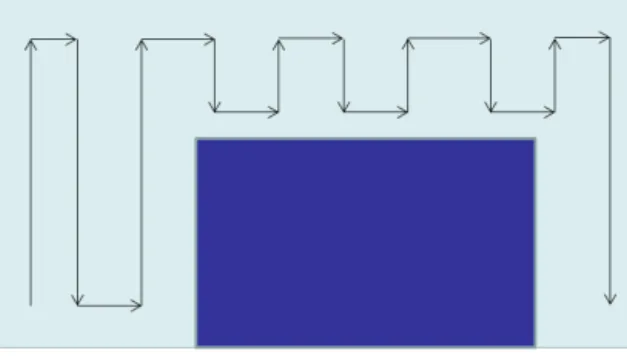
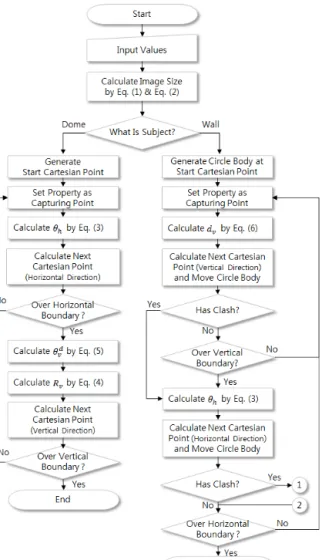
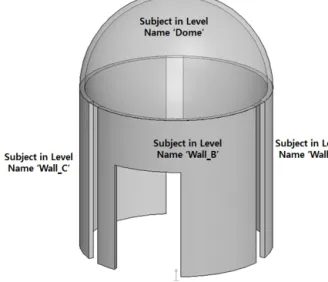
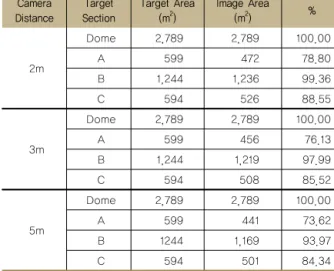
ABSTRACT: This paper provides a method for generating flight path of Unmanned Aerial Vehicle (UAV) that is intended to be used in visual inspection of dome-type nuclear containment building. The method basically employs 3-D model to extract accurate location coordinates. Two basic route patterns that provide guide lines in defining moving locations were defined for each side wall and dome section of the containment. The route patterns support sequential capturing of images as well. In addition, several simple equations and an algorithm for calculation of the moving location on the route were developed on the basis of 3-D geometric characteristics of the containment building. A prototype computer program has been implemented to validate the proposed method, and a case study shows the method can visualize covering area in 3-D model as well.
KEYWORDS: Nuclear Containment Building, Visual Inspection, Unmanned Aerial Vehicle, 3-D Model 키워드: 원자력 격납건물, 외관조사, 무인항공기, 3차원 모델
1)정회원, 태성에스엔아이 이사 ([email protected]) (교신저자)