영상처리 및 퍼지논리를 이용한 교통 신호제어 연구
신지환, 박무훈*
Research of Controled Traffic Signal by Image Processing and Fuzzy Logic
Ji-Hwan Shin, Mu-Hun Park*
요 약 본 논문에서는 교차로에 설치된 카메라를 이용하여 각 도로로 유입·유출되는 교통량을 동시에 측정할 수 있도 록 하였으며, 측정한 데이터를 퍼지논리에 적용하여 녹색 신호를 제어하는 시스템을 제안한다. 기존의 퍼지논리를 이용 한 신호등 제어 시스템은 신호대기 중인 차량 숫자를 측정하여 기반 데이터로 사용하였으나, 본 논문에서는 영상처리 를 이용하여 측정한 교차로 유입 차량 수를 퍼지논리의 기반 데이터로 사용하여 심각한 교통 정체가 일어나기 전에 이 를 미연에 방지 할 수 있는 신호 제어로직을 고안한다. 본 논문에서 제안하는 교통신호 자동 제어로직을 활용하여 교통 정체가 일어나기 전에 각 도로간 교통량을 조절함으로써 교통 정체로 발생하는 운전자의 시간 낭비 및 에너지 낭비를 예방한다.
Abstract In this paper, We propose a method which prevents severe traffic jam by controlling traffic signal by itself based on image-processed information and fuzzy logic. The detailed idea of this method is first to let a closed monitoring camera gather the number of cars which show the flow of traffic the designated roads which are commonly considered to have traffic. After executing the image processing method on each image gathered from the monitoring camera, this system determines the changing timing of traffic signal based on fuzzy logic. Also, this image processing method shows good performance in real road environment because the setup background image which used in this system is designed to be updated in real time. All of good points mentioned above would lead driver and users to cost efficient and time efficient results by preventing the increase of the number of traffic on road in advance with the automatic traffic signal controlling algorithm based on the fuzzy logic.
Key Words : Automatic traffic signal controlling algorithm, Fuzzy logic, Image processing, Real time
This research is financially supported by Changwon National University in 2015∼2016.
* Corresponding Author : Division of Electronic Engineering, Changwon National University([email protected]) Received February 10, 2016 Revised February 15, 2016 Accepted February 17, 2016
1. 서 론
최근 경제 발달로 국민 총소득은 2000년대 이후 꾸준히 증가하였다. 소득의 증가로 생활의 편의성 에 대한 요구수준은 높아지고 이는 개인이 보유하 는 차량의 증가로 이어진다.
한정된 국토 내 매년 늘어나는 차량의 증가로 교통 혼잡은 더욱 심각해지고 있다. 교통이 혼잡해 짐에 따라 자동차가 도로에서 공회전 하는 시간은
매우 길어진다. 휘발유(1400원/L) 승용차를 기준으 로 하여 매일 10분씩 공회전을 한다고 가정하여 (138cc 소비), 국토교통부 조사결과자료를 참고하 여 국내 자동차 약 1977만 대로 따지면 하루 약 19억 원이 낭비되고 있는 것이다[1].
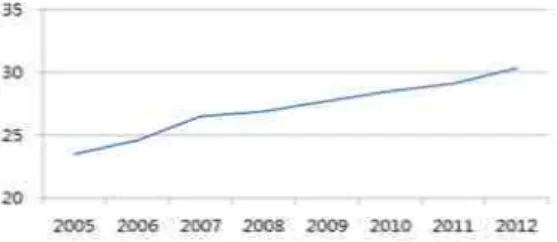
이렇듯 교통 체증으로 인한 도로 혼잡이 가중되 어 교통 혼잡 비용이 그림 1과 같이 매년 증가하 고 있다. 이러한 문제점을 해결하기 위한 방안 중 차량의 원활한 소통을 위하여 교통 신호등 제어시
스템의 중요성은 매우 크다[2][3].
교통 신호등 운용 방법에 있어 효율적인 방법은 도로 통과 차량 수 및 기상 등의 문제를 모두 고 려하여 가장 적절한 신호 주기를 결정하는 것이라 할 수 있는데 이러한 결정 과정은 인간적 사고 접 근 방식과 유사하다[4].
그림 1.교통 혼잡 비용 변화 추이 (단위:조) Fig. 1.Traffic congestion costs.
본 연구에서는 영상처리를 이용하여 도로 위 운 행 차량 수를 측정하고, 그 데이터를 기반으로 인 간의 사고와 가장 유사한 추론이 가능한 퍼지논리 를 이용하여 교통 정체를 미연에 방지하는데 도움 이 되는 교통신호 제어로직을 생성하고자 한다.
2. 교통량 측정 및 퍼지논리 신호제어
본 논문에서 제안하는 교통신호 제어시스템은 그림 2.1과 같다. 영상처리를 통해 차량의 통행량 을 측정하여 기반 데이터 생성 후, 퍼지논리를 적 용하여 상황에 맞는 교통신호 제어로직을 만든다.
그림 2.1.시스템 구성도
Fig. 2.1.Block diagram of System.
2.1 영상 단순화 및 객체검출
실시간 처리 속도를 높이기 위해 입력영상을 이 진화 하고 차 연산을 이용해 움직이는 자동차를 검출한다.
본 논문에서는 중간 값인 128을 임계값으로 주 어 원본영상을 이진화 영상으로 변환 시켰다[5-7].
그림 2.2는 640x320의 화소 수를 가진 RGB로 이루어진 원본 영상이다. 영상이 복잡하고 노이즈 에 민감하여 차량 수 측정과 정밀 측정을 위한 영 상처리에는 많은 어려움이 있다.
차량 수 측정을 효율적으로 하기 위하여 RGB 로 이루어진 원본 영상을 화소 값이 0과 255로 이 루어진 영상으로 이진화 한다. 따라서 실시간 영상 처리 속도 향상을 기대할 수 있고 차량 수 측정을 정확하게 할 수 있다.
RGB값으로 이루어진 원본 영상을 그레이 스케 일처리를 통해 명도 값만 가지는 영상으로 변환 시킨 후 그림 2.3과 같이 0, 255의 화소 값만으로 이루어진 이진화 영상을 획득 할 수 있다.
그림 2.2.원본 영상 Fig. 2.2.Original image.
그림 2.3. 이진화 영상 Fig. 2.3. Binarization image.
2.1.1 차 연산
이진화 연산 처리를 거친 후에도 건물, 가로수, 보행자 및 차선 등으로 영상이 복잡하게 이루어진 것을 확인 할 수 있다.
복잡하게 이루어진 영상에서는 차량 식별이 어 렵고 차량 수 측정 시 노이즈로 인한 오차가 커지 기 때문에 차 연산을 통해 배경을 설정, 소거하여 움직이는 차량 만 검출 할 수 있게 하였다. 차 연
산은 입력영상에서 배경으로 설정된 마스크 영상 을 빼는 것으로 실시간 영상에서 움직이는 물체를 검출 할 수 있다.
차 연산 처리의 수식은 식 (1)과 같다.
(1)
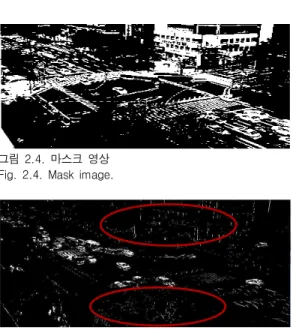
그림 2.4와 그림 2.5는 실제 촬영한 입력영상을 차 연산 하는 과정을 나타낸다. 이진화 결과영상 그림 2.3과 마스크영상 2.4의 차 연산 처리를 통해 그림 2.5과 같이 움직이는 자동차 객체만이 추출 된 것을 확인 할 수 있다.
그림 2.4. 마스크 영상 Fig. 2.4. Mask image.
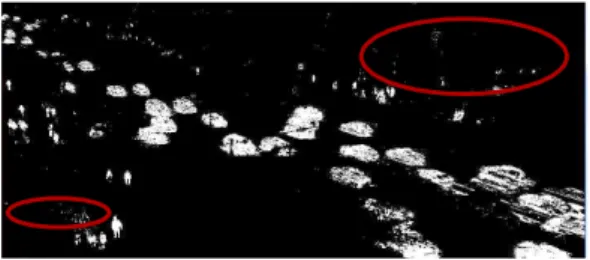
그림 2.5. 차 연산 결과 영상
Fig. 2.5. Image after Difference Processing.
2.1.2 평균배경 연산
2.1.1의 차 연산 이후 움직이는 객체를 검출 할 수 있었지만, 실시간으로 변화하는 실제 도로환경 에서 최초 설정되는 하나의 배경 이미지만 마스크 로 쓸 경우 그림 2.5와 같이 배경 소거가 잘 이루 어지지 않는 경우가 생긴다. 이러한 경우를 개선하 기 위하여 실시간으로 배경을 업데이트 하는 방법 을 사용하였다.
평균배경 연산 방법은 배경 모델을 생성하기 위
해 각 픽셀의 평균과 표준 편차를 이용한다.
평균배경 연산 수식은 식(2)와 같다.
i f ≠ (2)
← ∙ ∙
는 평균배경 화소 값을 나타내고 는
새로운 배경 화소 값 비율을 결정하는 상수 이다.
값이 1에 가까울수록 업데이트되는 배경데이터 의 비중이 높아진다.
그림 2.5의 차 연산 결과 영상의 빨간 원 안의 흰 선들로 이루어진 전경 노이즈를 확인 할 수 있 다. 이러한 전경 노이즈를 제거하기 위해 실시간으 로 배경을 업데이트 해주는 방법을 사용하였으며 새로운 배경을 업데이트하는 평균배경연산 과정은 그림 2.6과 그림 2.7에서 확인 할 수 있다. 그림 2.5에서의 원안의 노이즈가 그림 2.6과 그림 2.7과 같이 시간이 경과할수록 없어지는 것을 확인 할 수 있다.
그림 2.6. 2초 후 영상 Fig. 2.6. Image after 2s.
그림 2.7. 8초 후 영상 Fig. 2.7. Image after 8s.
2.1.3 노이즈 제거
이진화 영상처리 및 차 연산 결과영상에서 배경
에는 흰 점으로 노이즈가 발생하고, 객체로 검출된 차량에서는 검은 점들이 노이즈로 나타남을 확인 할 수 있다. 그림 2.8에 나타나는 노이즈를 제거하 기 위해 침식 및 팽창 연산을 수행한다.
그림 2.8. 평균 배경연산 후 영상
Fig. 2.8. Image after Average background processing
2.1.3.1 침식 연산
침식 연산은 정의한 화소 집합 내 가장 작은 값 을 픽셀 중심부의 값으로 바꾸는 최소 값 필터의 역할을 하여 유효 화소 값 영역을 축소시키며, 영 상의 물체와 배경사이에 점 노이즈가 있을 때 이 노이즈를 제거하거나 전체영상에서 아주 작은 스 파크 노이즈나 물체를 제거하는데 응용된다. 집합 A와 B에 대해, B에 대한 A의 침식은 ⊖ 로
표기하고 식(3)과 같이 정의 한다.
⊖ ⊆ (3)
그림 2.9는 침식 연산을 수행하기 전 영상이며, 그림 2.10은 침식 연산 수행한 후 결과 영상을 나 타낸다. 침식 연산 결과, 흰색 점들이 제거되어 깨 끗한 배경을 얻을 수 있지만, 추출 된 자동차 객체 내 검은 노이즈는 아직 존재함을 확인 할 수 있다.
그림 2.9. 침식 연산 전 영상
Fig. 2.9. Image before Erosion Processing.
그림 2.10. 침식 연산 후 영상
Fig. 2.10. Image after Erosion Processing.
2.1.3.2 팽창 연산
팽창 연산은 정해진 화소 집합 내 최대 값을 현 재 화소로 바꾸는 최대값 필터 역할을 하며, 영역 물체 내부의 돌출부는 감소시키고 외부의 돌출부 는 증가시켜서 물체의 크기를 확대시키고 배경은 축소시킨다. 집합 A와 B에서, B에 관한 A의 팽창 은 식 (4)과 같이 정의 한다.
⊕ ∊ ∊ (4)
그림 2.11는 팽창 연산을 수행하기 전 영상이며, 그림 2.12는 팽창 연산 수행 후 결과 영상이다. 팽 창 연산을 수행한 결과, 추출 된 자동차 객체 내부 의 검은 노이즈들이 제거되었음을 확인 할 수 있 다. 하지만, 팽창 배경 쪽 흰 노이즈 역시 팽창되 어 커졌음을 알 수 있다. 이로 인해 침식 또는 팽
창 연산만을 이용하여서는 효과적인 노이즈 제거 가 불가능함을 알 수 있다.
그림 2.11. 팽창연산 전 영상
Fig. 2.11. Image before Dilation Processing.
그림 2.12. 팽창연산 후 영상
Fig. 2.12. Image after Dilation Processing.
이를 개선하기 위해 침식->팽창->팽창->침식 ->팽창 연산 과정을 수행한 결과, 그림 2.13의 배 경 쪽 흰 노이즈와 추출된 객체 내부 검은 노이즈 들이 개선되었음을 그림 2.14를 통해 확인 할 수 있으며, 차량 수 측정을 위한 객체 검출이 효과적 으로 이루어짐을 알 수 있다.
그림 2.13. 침식 및 팽창연산 전 영상 Fig. 2.13. Image before Dilation and Erosion.
그림 2.14. 침식 및 팽창연산 후 영상 Fig. 2.14. Image after Dilation and Erosion.
2.1.4 차량 수 검출 2.1.4.1 관심영역 설정
관심영역은 영상 전체에 영상처리를 적용하지 않고 일정한 영역에만 영상 처리를 하는 것이다.
일정 영역만 처리하므로 연산시간을 단축할 수 있 다.
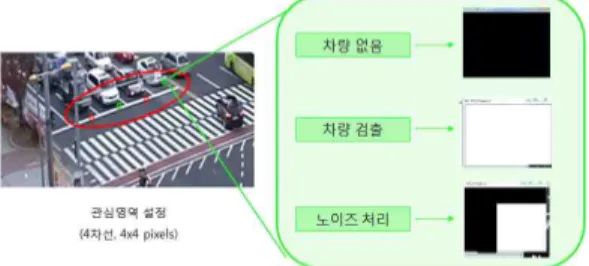
본 논문에서는 각 차선별 관심영역을 설정하여 차량의 통과 여부를 확인한다. 그림 2.15는 관심영 역 설정 후 관심영역 내 영상변화를 추출한 영상 이다. 차량이 없을 때는 검은색이며 화소 값은 0이 고, 차량이 검출될 때는 흰색이며 화소 값은 255의 값을 가진다. 관심영역 내 일부분만 255의 화소 값 을 가진 화소가 추출되는 경우도 발생하는데 차량 객체는 관심영역 16픽셀보다 무조건 크므로 이는 노이즈로 처리하여 차량 측정 정밀도를 높였다.
그림 2.15. 관심영역 내 영상변화 Fig. 2.15. Changing of image in ROI.
2.1.4.2 화소 값 변화 검출
그림 2.16은 그림 2.14의 히스토그램을 나타낸 다. 영상의 배경은 0의 값만 가지고, 움직이는 객 체는 255의 값을 가지므로, 관심영역 내 화소 값이 0->255로 변화할 경우를 검출하면 차량수를 측정 할 수 있다.
빈 도 수
255 그림 2.16. 이진화 영상의 히스토그램
Fig. 2.16. Histogram of Binarization image.
그림 2.17은 관심영역 내 차량이 검출되지 않는 영상 및 차량이 검출되는 영상의 히스토그램을 나 타낸다. 차량이 검출되지 않을 때는 관심영역내의 모든 화소 값이 0이며 히스토그램 역시 0의 값만 가지는 것을 알 수 있다. 차량이 검출 되었을 때는 모든 화소 값이 255이며 히스토그램 역시 255의 값만 가지는 것을 알 수 있다.
그림 2.17. 관심영역 내 영상 및 히스토그램 Fig. 2.17. Image and Histogram in ROI.
그림 2.18은 관심영역 내 화소변화의 영상 및 히스토그램을 나타낸다. 관심영역을 설정해 차량 수를 측정함에 있어 차량이 진입 또는 진출할 때 생기는 화소변화가 이중으로 카운트되어 차량 수 측정에 오차가 생기므로 관심영역 크기인 16pixel 미만의 화소변화는 노이즈로 처리하여 차량 수 측 정의 정확도를 향상 시킬 수 있었다.
그림 2.18. 관심영역 내 화소변화 영상 및 히스토그램 Fig. 2.18. Image of Changing pixel and Histogram in
ROI.
2.2 교통량 판단
본 논문에서는 영상처리를 통해 측정한 차량 수 를 기반데이터로 교통량을 판단한다. 판단방법에는 퍼지논리 중 가장 흔히 사용되는 Mamdani의 퍼지 추론 규칙을 이용 하였으며 소속함수 집합은 차량
수에 따라 3종류로 설정 하였다.
2.2.1 퍼지추론 규칙
규칙1 : if and 규칙2 : if and 규칙3 : if and 규칙4 : if and :
규칙n: i f and
, (전 조건 변수)는 제어 대상의 상태 변수 이고, 퍼지 제어장치의 입력 값이다. (후 조건 변
수)는 제어 대상의 조작 량이며, 출력 값을 나타낸 다. (i=1,…, n)는 언어 변수이며, 각각 전 체집합 , 에 있어서의 퍼지 집합이다. 는 차 선, A와 B 는 차량 수, 는 교통량, C 는 교통량 판단을 나타낸다.
2.2.2 퍼지 소속함수 설정
창원 시청 교차로의 녹색점등 시간 60초간 평균 통과 차량 수 70대를 기준으로 소속함수 차량 수 를 설정 하였다. 그림 2.19는 차량 수에 따른 퍼지 소속함수 설정을 나타낸다.
그림 2.19. 퍼지 소속함수 설정 Fig. 2.19. Setup Function of Fuzzy
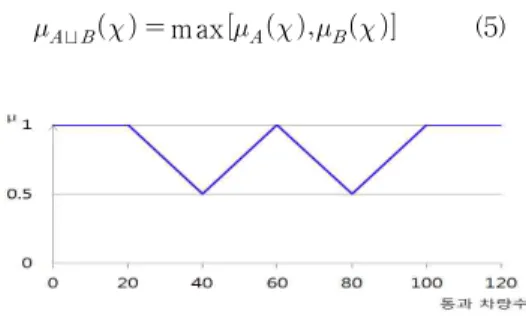
각 퍼지 집합의 겹치는 부분의 합집합은 max 함수를 사용하였으며, 합집합의 소속함수는 퍼지 집합에 관한 소속의 최댓값으로 정의한다. 식(5)와 그림 2.20은 소속함수들의 합집합 출력을 나타낸 다.
⊔ max (5)
그림 2.20. 퍼지논리의 Max 함수 값
Fig. 2.20. Setup max of Function of Fuzzy logic.
2.3 교통신호 제어
교통신호등 운용방법에 있어 도로통과 차량 수, 신호 대기 차량 수, 보행자 수 및 기상 등의 문제 를 모두 고려하여 가장 적절한 신호주기를 결정하 는 것이 이상적이다. 이러한 많은 변수들을 고려하 여 교통량을 판단하기 위해서 퍼지논리의 사용이 가장 효율적이라 볼 수 있다.
본 논문에서는 영상처리를 이용한 차량 수 데이 터를 이용하여 생성되는 퍼지논리 소속함수 값을 토대로 교통량을 판단하고 녹색신호등 점등시간을 제어하였다. A는 60초이며 창원 시청 교차로 녹색 신호 점등시간을 기준으로 설정하였으며 차량 수 에 따라 자동으로 교통량이 판단되고 녹색신호 점 등시간을 다르게 분배한다. 표 1은 교통량에 따른 녹색신호 점등시간을 나타낸다.
표 1. 녹색신호 점등시간 Table 1. Time of Green Signal.
차량수(대) 교통량 판단 녹색신호 점등시간 (s) 1∼39 적음 30∼ A*(차량 수/소속함수 총 차량 수) 40∼79 보통 A*(차량 수/소속함수 총 차량 수)
80∼ 많음 A*(차량 수/소속함수 총 차량 수)∼90
3. 실 험 결 과
차량의 이동이 비교적 많은 퇴근시간(18:00)에창 원시청 교차로에서 60초간 지나간 실제 차량 수를 DCR-SR100(소니)카메라를 사용하여 촬영하였으 며, 본 논문에서 제안한 교통신호 제어시스템을 이
용하여 측정한 차량 수와 실제 차량 수를 비교해 보았다.
영상처리를 이용한 차량 수 측정 실험은 Microsoft Visual Studio 2010(C/C++)과 OpenCV 를 이용하여 알고리즘을 구현하였고, 시스템은 Intel(R) Core(TM) I5-2500 CPU @ 3GHz, 4GByte RAM, ATI 7850 그래픽카드를 가진 PC에 서 수행하였으며, OS는 Windows 7 Ultimate 32bit를 사용하였다.
그림 3.1은 영상처리를 이용한 차량 수 측정결 과를 기반으로 소속함수 값과 교통량을 구하는 알 고리즘이다.
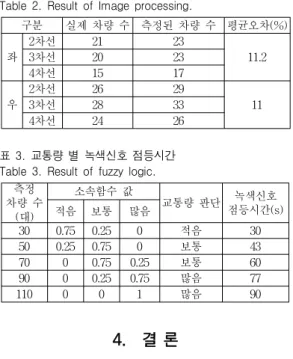
표 2는 영상처리를 통해 차량 수를 측정하는 프 로그램을 만들어 실행해 60초간 지나간 실제 차량 수와 영상처리를 이용해 측정된 차량 수를 비교한 평균오차의 결과를 나타낸다. 차량 수 측정 실험 결과는 좌측 차선 11.2%, 우측 차선 11%의 평균 오차율을 얻을 수 있었다. 유동인구, 차량 이동, 가 로수 및 건물의 빛 반사가 많은 지역임을 감안했 을 때 우수한 결과라고 판단된다.
표 3은 영상처리를 이용해 얻은 차량 수 데이터 를 기반으로 퍼지논리 소속함수를 설정하여 차량 수에 따른 함수 값 생성 및 교통량 판단결과를 나 타낸다. 차량 수의 변화에 따라 교통량 판단이 유 동적으로 제어되는 것을 확인 할 수 있었으며, 측 정된 차량 수를 기반으로 생성되는 소속함수 값과 교통량 판단결과 부여되는 녹색신호 점등시간을 구할 수 있었다.
그림 3.1. 교통 신호제어 알고리즘
Fig. 3.1. Algorithm of Executing signal control.
표 2. 실제 차량 수와 측정된 차량 수 Table 2. Result of Image processing.
구분 실제 차량 수 측정된 차량 수 평균오차(%) 좌
2차선 21 23
11.2
3차선 20 23
4차선 15 17
우
2차선 26 29
11
3차선 28 33
4차선 24 26
표 3. 교통량 별 녹색신호 점등시간 Table 3. Result of fuzzy logic.
차량 수측정 (대)
소속함수 값
교통량 판단 녹색신호점등시간(s)
적음 보통 많음
30 0.75 0.25 0 적음 30
50 0.25 0.75 0 보통 43
70 0 0.75 0.25 보통 60
90 0 0.25 0.75 많음 77
110 0 0 1 많음 90
4. 결 론
최근 경제발달과 국민소득 증가로 개인 보유차 량이 급격하게 증가하였다. 한정된 국토 내 급격한 차량 증가는 심각한 교통혼잡을 야기 시켰고, 이러 한 교통혼잡으로 인해 도로 위에서 낭비되는 시간 적, 금전적 교통혼잡 비용은 매년 증가하는 추세이 다. 이러한 문제를 해결하고자 영상처리 및 퍼지논 리를 이용한 교통 신호제어 방법을 제안하였다.
본 논문에서 제안한 영상처리 및 퍼지논리를 이 용한 교통 신호제어 시스템은 카메라로 입력되는 영상을 이진화 영상으로 변환하여 실시간 처리 속 도를 높였고, 차 연산을 이용하여 변화가 심한 실 제 도로상황에서 움직이는 자동차 객체 추출을 원 활하게 하였다. 또한 침식 및 팽창 연산을 이용하 여 노이즈를 제거하고, 관심영역 내 발생하는 화소 값 변화를 히스토그램을 통해 검출하여 정확한 차 량 수를 측정하였다. 그리고 측정된 차량 수 데이 터를 기반으로 퍼지논리를 이용하여 녹색신호등 점등시간을 구하였다.
본 논문은 교통 정체가 일어나기 전에 각 도로 간 교통량을 조절함으로써 교통 정체로 발생하는 운전자의 시간 낭비 및 에너지 낭비를 예방하는
좋은 논문이다.
향후, 교통정체를 정확하게 예측하기 위해서 야 간 및 안개 조건에서도 교통정체 상황을 실시간으 로 처리하는 영상 알고리즘 및 상위 교차로 와 하 위 교차로 연동 예측 알고리즘에 관하여 연구하고 자 한다.
REFERENCES
[1] K. B. Kim, “Intelligent Traffic Light Control using Fuzzy Method”Korea Institute of Information and Communication Engineering, vol. 15, pp. 1593-1598, Aug, 2012.
[2] ‘Analysis of Traffic Congestion Cost’, The Korea Transport Institute, 2013.
[3] S. M. Jin, S. H. Kim, C. W. Do,
“Development of the Traffic Actuation Signal Control System Based on Fuzzy Logic on an Arterial Street” Journal of Korea Transportation Research Society, vol.
21, no. 3, pp. 71-83, 2003.
[4] Y. Y. Nam, Y. J. Choi, S. J. Hong, W. D.
Cho,, Intelligent video surveillance systems:
principles, pp. 20-40, JINHANM&B, 2011.
[5] J. B. Shin, S. B. Jang, I. H. Ji, Introduction of Digital Image Processing, HANBITMEDIA, 2008.
[6] G. R. Bradski, A. Keahler, Learning OpenCV, Korea, SU: HANBIT Media, 2009.
[7] E. J. Kang, J. E. Ha, Digital Image Processing by VISUAL C++, HANBITMEDIA, 2009.
[8] S. G. Hwang, Image Processing Programming by C++. HANBITMEDIA, 2009.
[9] R. C. Gnalez, R. E. Woods, Digital Image Processing, England, pp. 40-120, EG:
Addison Wesley Longman Limited, 1992.
[10] J. S. Lee, Basic of Transport Image Processing, pp. 17-50, DONGHWAJISUL, 2013.
[11] J. S. Kim, M. Y. Um, Digital Signal Processing by Image, pp. 35-70, HANBITACADEMY, 2014.
[12] J. Mohammad, Applications of fuzzy logic : towards high machine intelligence quotient systems, pp. 40-620, Upper Saddle River, N.J : Prentice Hall PTR, 1997.
[13] J. Ross, J. Timothy, Fuzzy logic with engineering applications, Hoboken, pp.
80-580, NJ : John Wiley, 2010.
[14] Y. G. Jeong, T. O. Um, D. G. Kim,
“Study on the Efficient Control for Intersection Traffic Light Using by Fuzzy Logic Controller” The Korea Institute of Communications and Information Sciences, vol. 9, no. 1, pp. 615-618, 1996.
[15] G. M. Baek, J. H. Shin, M. H. Park,
“Development of Auto Traffic Light Control System for Prevention of Traffic Jam” The Korea Institute of Signal Processing and Systems , vol. 15, no. 4, pp. 148-154, 2014.
저자약력
신 지 환(Ji-Hwan Shin)
• 2013년 2월 창원대학교 전자공 학과 (공학사)
• 2016년 2월 창원대학교 전자공 학과 (공학석사)
<관심분야> 디지털 신호처리, 영상 신호처리, 센서 네트워크
박 무 훈(Mu-Hun Park) [종신회원]
• 1990년 2월 경북대학교 전자공 학과 (공학사)
• 1993년 3월 東北대학교 전기통 신공학과 (공학석사)
• 1996년 3월 東北대학교 전기통 신공학과 (공학박사)
• 1998년 ~ 국립 창원대학교 전자 공학과 교수
<관심분야> 영상 신호처리