http://dx.doi.org/10.5369/JSST.2019.28.4.246 pISSN 1225-5475/eISSN 2093-7563
VCA(Voice Coil Actuator) 구동 평형저울에서 VCA 자기 감쇠 특성이 측정 속도에 미치는 영향
안지윤 · 안중환+
Effect of Magnetic Damping on Measurement Speed in a VCA-driven Balancing Scale
Ji Yun An and Jung Hwan Ahn+
Abstract
In this study, in conjunction with a SIMULINK program based on system modeling of a voice-coil-actuator (VCA)-driven bal- ancing scale, a proportional-integral-derivative control algorithm is implemented, and weighing characteristics are investigated through experiments and simulations. The extent to which the back electromotive force induced in the VCA-driven circuit and the magnetic damping induced by the coil wound bobbin of VCA affect the weighing speed is also investigated.
Keywords: Voice coil actuator, balancing scale, SIMULINK program, balancing control, magnetic damping
1. 서 론
무게 측정 기술은 자동화 및 표준화 기술의 진보에 따라 정 밀도와 속도가 계속 향상되어 왔다. 원리 측면에서 일반적으로 두가지 - 처짐(deflection)과 평형(balancing) – 방식이 있는데 이 중 평형식은 속도는 늦지만 정밀도가 우수하다고 알려져 있다.
최근 식품, 제약, 전자 등의 산업에서 부품과 무게가 작아지면 서 측정 분해능이 작은 평형식 측정이 요구되고 있다. 나아가 이들 부품을 컨베이어로 이동하는 도중에 중량을 검사하는 중 량선별기(checkweigher) 가 많이 보급되면서 측정 속도를 높여 야 할 필요성이 커졌다.
VCA(Voice Coil Actuator) 제어 평형식 저울은 측정물의 무 게와 같은 크기의 전자기력 – 로렌츠힘 - 을 발생시켜 평형이 됐을 때의 전자기력을 무게로 추정하는 방식이다. VCA는 고 속으로 직선 구동이 가능하여 빠른 응답이 필요한 곳에 주로 사용되고 있다[1-5]. 전자기력이 전류에 비례하기 때문에 VCA 에 흐르는 전류를 제어함으로써 전자기력을 조절할 수 있어
평형 제어를 빠르게 할 수 있는 장점이 있다. 그러나 VCA에 는 자석과 코일이 상호작용을 하여 전자기력을 일으켜 구동력 으로 이용하지만, 코일로 둘러싸인 보빈(bobbin)이 움직이면 서 생긴 와전류(eddy current)가 자석과 상호작용하여 힘 –자 기감쇠력- 을 생성하여 운동을 방해하기도 한다. 이 자기 감 쇠(magnetic damping)는 보빈의 형상과 재료, 자석의 자속 밀 도와 밀접하게 관련이 있다.
본 연구에서는 VCA 제어 평형 저울의 시스템 모델링을 바탕 으로 VCA의 역기전력이 측정 속도에 어떤 영향을 미치는지, 또 자기감쇠계수가 측정 속도에 어떤 영향을 미치는지 실험데이터와 시뮬레이션 데이터를 비교 분석하고, 자기감쇠계수의 최적 값을 제시하여 차후 VCA의 보빈과 자석 설계에 도움을 주고자 한다.
2. 시스템 모델링
2.1 VCA 보정 평형저울의 구조
Fig. 1은 보이스코일구동기(VCA, Voice Coil Actuator) 보정 평형저울의 대략적인 구조를 나타낸다. 이 시스템은 물체를 오 른쪽 저울대에 올렸을 때 변형하는 힌지와 이 변형량을 증폭하 는 지렛대로 구성된 기계 모듈과 변형을 보정하여 평형상태로 되돌리려는 구동기 모듈로 구성된다.
2.2 지렛대 운동 모델링
VCA 보정 평형저울의 동적 특성을 조사하기 위해 m,c,k 의
부산대학교 기계공학부(School of Mechtronical Engineering, PusanNational Unversity)
M building 117, Pusan National University, 2, Busandaehak-ro 63 boen-gil, Geumjeong-gu, Busan 46241, Korea
+Corresponding author: [email protected]
(Received : Jun. 10, 2019, Revised : July. 19, 2019, Accepted : July. 22, 2019)
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/
licenses/bync/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
동적 모델로 도시하면 Fig. 2와 같다. 힌지는 스프링(k)으로, VCA의 보정력과 자기 감쇠(magnetic damping)를 각각 F
VCA, c 로, 물체는 m으로, 컨베이어 질량은 M
c로 표현한다. M
0는 저울 의 초기 평형을 위한 대응(counter) 질량이다. x는 VCA 위치점 (L
2) 에서 수직 변위로 레이저 변위 센서로 측정된다. 물체와 컨 베이어 위치점(L
1)에서 변위는 y 이다. 측정 물체(m)가 저울대 (weighing pan) 에 놓이면 지렛대가 회전하고, VCA를 이용해서 이를 보상하려는 평형 제어(balancing control)가 시작된다. Fig.2(a) 의 자유물체도에 따라 외력 모멘트 M
P와 지렛대 관성모멘트 I 는 각각 식(1), 식(2)와 같다.
(1)
(2) M
P와 I를 지렛대의 회전운동식 에 대입하면 식(3) 이 된다.
(3)
회전 변형이 아주 작기 때문에 이
고 식(3)은 식(4)의 직선운동식으로 변환되고, Fig. 2(b) 처럼 단순화 된다.
(4)
여기서, 등가 질량과 등가 강성은 각각 ,
이다.
식(4)를 라플라스 변환하면 식(5)가 된다.
(5)
3. VCA 구동 지렛대 평형제어 모델링
VCA 는 저울에 측정물을 올렸을 때 생기는 지렛대 처짐을 평 형(Balancing) 상태로 원상회복시키는 데 필요한 힘을 생성하는 핵심장치로서 VCA 전기적 특성이 측정 성능에 큰 영향을 미친다.
3.1 VCA 구조
VCA 의 구조는 Fig. 3처럼 외벽에 자석이 놓여 있고, 가운데 코일이 감긴 보빈(bobbin)이 아래 위로 자유롭게 이동할 수 있 게 되어 있다.
3.2 VCA 구동 회로 모델링
VCA 의 등가 구동 회로는 Fig. 4와 같고, 이 회로의 전압 식 은 식(6)처럼 표현된다[6].
(8) 여기서, r은 전류 측정용 저항 센서이고, 는 역기전력으로 보빈의 속도에 비례하고, 커질수록 코일에 흘리는 전류를 작게 한다. VCA의 전기적 사양은 L = 0.0245 H, R = 28.9 ohm, k
bM
p= mg L ⋅
1– ( cx · + F
VCA)L
2– ky L ⋅
1I = ( m M +
c)L
12+ M
0⋅ L
22M
P= I ⋅ θ ··
cx · + F
VCA( )L
2– – ky L ⋅
1+ mgL
1= { ( m M +
c)L
12+ M
0⋅ L
22}θ··
forθ 1 «
( ) x = L
2sin θ L ≈
2θ y L
1L
2--- x ⋅
=
M
ex ··
cx · k
e+ +
⋅ mg L
1L
2--- F +
VCA=
M
e( m M +
C) L
1L
2---
⎝ ⎠ ⎛ ⎞
2+ M
0⎩ ⎭
⎨ ⎬
⎧ ⎫
=
k
ek L
1L
2---
⎝ ⎠ ⎛ ⎞
2=
M
es
2+ cs k +
e( )x s ( ) mg L
1L
2--- F +
VCA=
V ( R r + )i L di dt ---- k
b⋅ x · + +
=
k
bx · Fig. 1. Schematic diagram of a VCA-driven balancing scale
Fig. 2. Free body diagram of lever motion in balancing scale: (a) Rotational motion model about a pivot ; (b) Rectilinear motion model
Fig. 3. Structure of VCA
= 28.5 Vs/m, r=10 ohm 이다.
3.3 로렌츠 힘(FVCA)-전류(i) 모델링
자기장(B) 속에 놓여 있는 보빈 코일에 전류가 흐르면 전자 기 유도에 의해 로렌츠(Lorentz) 힘이 식(7)처럼 발생하고, 이 힘 이 지렛대에 연결된 보빈에 작용하여 지렛대의 처짐을 보상한다.
(7) 일반적으로 k
f=k
b로 알려져 있으며 선행연구에서 k
f=28.5 N/
A 인 것을 확인하였다.
식(6), (7)을 라플라스 변환하면 각각 식(8), (9)가 된다.
(8)
(9)
3.4 지렛대 평형 제어를 위한 PID 알고리즘 모델
Fig. 1 에서 측정 물체가 저울대에 놓이면 힌지가 미세 변형을 하고, 그 미세 변형이 지렛대 기구에 의해 증폭(L
2/L
1) 되어 변 위(x)가 레이저 센서로 측정된다. 이 변위를 0로 만드는데 필요 한 힘을 생성하기 위해 식(10)과 같은 PID 제어 알고리즘이 작 동하는데, VCA 구동 회로의 전압(V)은 목표 값(0)과 변위(x)의 차이(e)를 기반으로 산출된다. PID 이득은 시스템 모델의 변수 가 정의되면 최적화된 값으로 설정할 수 있다.[7]
(10)
4. 시뮬레이션과 실험을 통한 시스템 특성
4.1 Simulink 모델
식(5), (8), (9), (10)를 종합하면 VCA 구동 평형저울의 시뮬 레이션 모델이 되고, 이것을 Simulink 에서 표현한 것이 Fig. 5 와 같다.
4.2 실험 장치
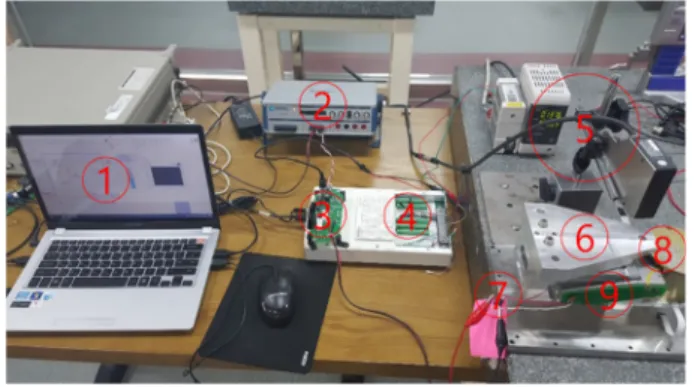
Fig. 6은 VCA 구동 평형저울의 특성을 조사하기 위한 실험 장치의 사진을 나타낸다. 변위는 레이저 변위 센서로, 코일 전 류는 저항 센서로 각각 측정한다. LabVIEW 는 장치 제어와 데 이터 수집 프로그램을 집행하고, DAQ 는 데이터 입출력을 인 터페이싱하고, Power supply 는 VCA 구동 회로에 전원을 공급한다.
4.3 시스템 변수(Me, c, ke) 추정
초기에 컨베이어, 대응 질량, 측정물 없이(M
c=0, M
0=0, m=0) VCA 힘으로 지렛대 기구를 평형상태((x=0, L
1=3.5 mm, L
2=97.7 mm)로 유지하려면 코일 전류는 56 mA 가 필요한데 이것은 식 (7) 에 의해 F
VCA=1.596 N 이고, 대응 질량 M
0=160 g 에 해당한 다. 또한 선행연구에서 k
e=1453 N/m, c=26.5 Ns/m ( 이때 감쇠 비=0.89) 인 것을 알았다.
4.4 VCA 역기전력 영향
Fig. 7 은 보빈의 운동으로 발생하는 역기전력이 VCA의 성능 에 어떤 영향을 주는지 시뮬레이션과 실험적으로 보인다. 역기 전력은 코일 전류의 스텝 반응을 늦추고 그 결과 지렛대의 스 텝 반응도 늦추고 있음을 보여준다. 코일 전류는 입력 전압이 입력된 시점보다 0.08 ms 정도 늦게 나타난다.
F
VCA= k
fi
V s ( ) k –
b⋅ sx s ( ) = ( R r L s + + ⋅ )I s ( )
F
VCA= K
fI s ( )
V t ( ) K
pe t ( ) K
ie t ( ) t K
de d
t --- d +
0
d
∫
t+
=
Fig. 4. Equivalent circuit of VCA
Fig. 5. Simulink model of a VCA driven balancing scale
Fig. 6. Experimental setup
1. PC with LabVIEW 2. Power supply 3. VCA driver 4.
DAQ board 5. Laser displacement sensor 6. Weighing pan 7.
Resistor sensor 8.Voice coil actuator 9. Hinge & Lever
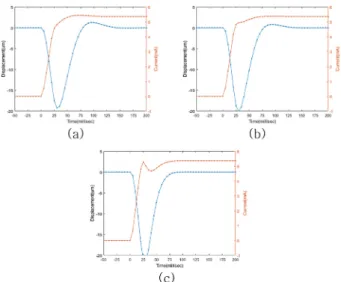
4.5 자기 감쇠 계수 c의 영향
자기 감쇠는 VCA의 보빈에 생긴 와전류(eddy current)와 자 석의 상호작용에 의한 전자기력이 보빈의 운동을 억제하는 작 용이다[8]. 자기감쇠계수 c는 보빈의 형상이나 재료와 밀접한 관
계가 있어 보빈을 설계할 때 고려하여야 할 요소이다. c 의 영 향을 조사하기 위해 현재 값 c=26.5 Ns/m 보다 작거나 크게 변 화시켜 제어 부 없는 Simulink 모델에서 시뮬레이션을 하였다.
스텝 전압을 VCA 구동 회로에 입력할 때 코일에 흐르는 전류 와 변위 x의 시뮬레이션 결과와 실제 장치로 실험한 스텝 응답 결과를 비교하여 Fig. 8처럼 정리하였다. 코일 전류는 Fig. 1에 서 코일에 직렬로 연결된 저항(resistor) 센서(r=10 ohm)에 의해 측정되는데, 전류 측정값의 잡음을 줄이기 위해 5점 이동 평균 (moving average) 을 취하였다. 선행실험에서처럼 c=26.5 일 때 실험과 시뮬레이션 결과가 가장 일치하였다. c=36.5 일 때는 실 제보다 시뮬레이션 결과 전류와 변위가 더 늦은 반응을 보이고, c=16.5 일 때는 더 빠른 반응을 나타난다. 따라서 c가 커질수록 보빈의 응답속도가 늦음을 알 수 있다.
4.6 VCA 구동 평형 제어 특성
4.6.1 PID이득 결정
3.5 절에서 언급한 PID 알고리즘의 이득을 구하기 위해 Ziegler- Nichols 법을 이용해서 실험적으로 조정한(tuning) 최적 PID 이 득은 k
p=0.5, k
i=30, k
d=0.003 이다. 레이저 센서로 측정된 변위 신호는 차단 주파수 f
c가 100 Hz 인 LPF(Low Pass Filter) 처리 로 고주파 오차를 줄인다.
4.6.2 평형저울의 제어 거동
앞의 PID 알고리즘으로 평형저울의 동작을 실험하였다. Fig.
9는 500 g 측정물을 올렸을 때 지렛대 변위와 VCA의 코일 전 류의 변화를 나타낸다. Fig. 2(b) 직선운동모델에 따르면 (500 * L
1/L
2) g 이 VCA 에 작용하므로 식(7)에 의해 상응하는 로렌츠 힘 0.1756 N 를 생성하는 전류 54 mA 가 필요하다. 변위가 감 소함에 따라 보상하는 전류가 급격히 상승하고 59 mA 에 도달 하면(약 0.05 초) 변위가 감소하기 시작하면서 약 0.09 초에 평 Fig. 7. Effect of BEMF on step response of coil current and lever dis-
placement : (a) k
b=0, (b) k
b=28.5.
Fig. 8. Effect of magnetic damping coefficient(c) on responses of coil current and lever displacement : (a) c=16.5, (b) c=26.5, (c) c=36.5.
Fig. 9. Behavior of displacement and current during balancing con-
trol
형점에 도달한다. 전류는 약간 빨리 약 0.07 초에 평형점에 도 달한다. 따라서 평형점 도달 시점에 전류 값으로 무게를 추정할 수 있으므로 현 시스템의 측정 시간은 0.07~0.09 초이다. 적어 도 0.1 초에 안정적으로 1회 측정을 할 수 있다.
4.6.3 자기감쇠계수 c의 영향
자기 감쇠 c를 26.5, 16.5, 0으로 바꾸어 가며 평형저울의 제 어 특성을 시뮬레이션 한 결과 Fig. 10과 같다. 실제 실험결과 인 Fig. 9와 전류와 변위의 거동이 비슷하여 시스템 모델링이 비교적 잘 된 것을 확인할 수 있다. c를 작게 할수록 전류와 변 위의 거동이 조금 빨라져 측정시간을 단축할 수 있겠지만 c=0 에서 전류 값에 오버슈트가 생겨 바람직스럽지 않아 최적의 c 를 찾을 필요가 있다.
5. 결 론
VCA 구동 평형 저울의 제어시스템 모델을 Simulink 프로그 램으로 작성하여 측정 성능을 분석하였으며 이를 통해 얻은 결 과는 다음과 같다.
1) VCA 의 보빈 운동에 의한 역기전력은 코일 전류 흐름을 늦 추고 로렌츠 힘의 생성 속도도 늦추어 평형 저울의 평형 복귀 속도를 떨어뜨린다. 정밀한 해석을 위해서 그 영향을 고려하여야 한다.
2) 평형 점에 도달하는 변위의 거동보다 평형 제어에 사용되 는 전류의 거동이 빨라 전류 변화를 감시하면 측정 속도를 높 일 수 있다.
3) 현 장치로 0.1초에 1회 측정이 가능하지만 VCA의 자기감 쇠계수를 작아지도록 보빈을 설계하면 측정시간을 더 줄일 수 있다. 단, 측정정밀도를 고려하면 평형점 도달시간이 늦어지므 로 측정 속도는 늦어질 것이다.
감사의 글
이 과제는 부산대학교 기본연구지원사업(2년)에 의하여 연구되었음
REFERENCES