바퀴기반 휴머노이드 로봇 SEROPI 개발
Development of SEROPI as a wheel-based humanoid robot
최 무 성1, 신 은 철1, 양 광 웅2, 김 홍 석3
Moosung Choi1, Eun-Cheol Shin1, Kwang-Woong Yang2, Hong-Seok Kim3
Abstract Many researchers are studying on humanoid robots in all over the world. However the humanoid robots are still limited in doing works like picking up objects on the ground or moving rapidly.
In this study, a humanoid robot based on the wheel-driving was developed. It can operate with a human working area keeping the stability. Also, the developed robot can take up the object on the floor since it has knee(1DoF) and waist(3DoF), and do service quickly and steadily. The hardware and software structure and algorithms of the developed robot, SEROPI are introduced in this paper.
Keywords :Humanoid Robot, Wheel-base, SEROPI
1. 서 론
10년여 전부터 우리나라에서도 비 산업용 로봇에 대 한 관심이 커지고 연구 개발에 대한 투자도 늘어나고 있다. 투자된 금액만큼 결과물도 많이 나오고 있으며 관련 산업의 분위기도 활성화 되어 로봇을 하겠다는 기 업들도 우후죽순처럼 늘어나고 있는 실정이다[1]. 하지만 그러한 연구 개발에 대한 결과물들의 실용화를 살펴보 면 많이 미흡한 것이 사실이다. 개인용 서비스 로봇 분 야만 보면 바퀴기반의 로봇 중 청소용 로봇과 교육용 로봇, 경비 로봇이 일부 제품화 되고 있을 뿐이다. 대중 매체의 영향으로 소비자의 로봇에 대한 기대치는 매우 높아져 있지만, 이 기대치에 로봇 기술은 아직 미치지 못하고 있고, 연구 개발에 비해 실용화에 대한 노력은 많이 부족하였다. 로봇에 대한 지원과 대중적인 관심을 지속시키기 위해서는 원천 기술 개발도 중요하지만 현 재 개발되어 있는 기술을 이용하여 실용화하는 연구에 도 많은 노력을 기울여야 한다. 대표적인 서비스 로봇 중 하나인 2족형 인간형 로봇[2][3][4]은 일본을 중심으로 수십년 전부터 연구되어져 왔지만 안정성 및 실용성면
에서 본다면 아직 만족스러운 수준이 아니다. 또 다른 서비스 로봇의 형태인 모바일 매니퓰레이터 시스템[5][6]
은 2족형 인간형 로봇에 비해 안정적이지만 작업 가능 영역이 매니퓰레이터 높이로 한계가 있기 때문에 가능 한 서비스가 매우 제한적이다.
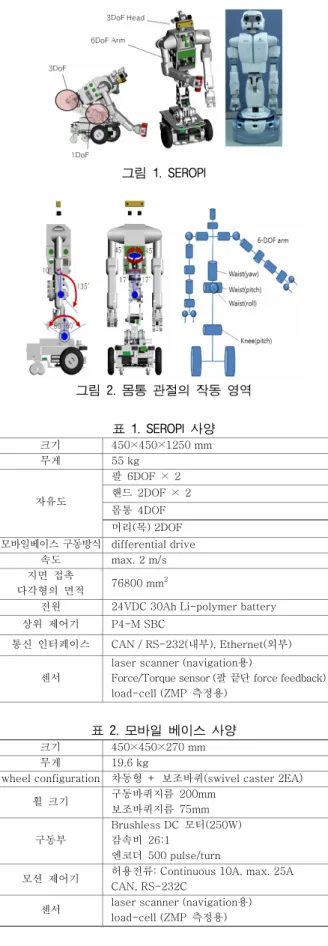
본 연구에서는 이러한 서비스 로봇의 비실용성을 인 지하고 그 해결책의 하나로 시스템 자체가 매우 안정적 이고, 따라서 제어가 어렵지 않으며 인간과 같은 작업 영역을 갖고 있어서 인간이 수행하는 서비스의 대부분 을 가능하게 할 수 있는 로봇 플랫폼 SEROPI(SErvice RObot Platform Initiative)를 개발하였다(그림 1 참조). 기 존에도 바퀴기반의 인간형 로봇이 있었지만 단순히 모 바일베이스에 양팔을 붙인 구조라서 접근할 수 있는 인 간의 작업 영역에 제한이 있었다. Sugano는 Wendy 및 Wamoeba 등의 바퀴기반 인간형 로봇을 만들어 인간과 공생하며 가능한 서비스들에 대한 연구를 하였고[16], Kanda, Hagita 등은 Robovie 시리즈를 만들어 인간의 일 상 환경에서 인간과 상호작용하며 안전하게 사용될 수 있는 로봇에 대해 연구하였다[7]. SEROPI는 무릎과 3자 유도의 허리 관절을 가지고 있어서 기존의 모바일 매니 퓰레이터 시스템에서는 어려웠던 바닥의 물건을 집어 테이블에 올려놓거나, 가·감속 시에 안정된 자세를 유지 하기 위해 상체를 움직이는 등의 동작들을 할 수 있으 며, 충돌 등의 외력 발생 시에도 안정된 자세를 유지할
※ 본 연구는 산업자원부 퍼스널로봇 기반기술 개발 과제 지원으로 수행되었음.
1 한국생산기술연구원 지능운동연구팀 연구원
2 한국생산기술연구원 지능운동연구팀 선임연구원
3 한국생산기술연구원 지능운동연구팀 수석연구원
수 있다. 계단이나 비평탄로 환경에서 움직이기 위해 서는 2족형 휴머노이드 로봇이 계속적으로 연구가 되 어야 하겠지만, 계단 이외의 실내에서 실용적으로 사 용될 수 있는 SEROPI와 같은 형태의 로봇플랫폼에 대 한 연구도 2족형 휴머노이드 실용화의 중간적 단계 또 는 특화된 응용분야를 위해 의미가 있는 연구가 될 것 이다.
SEROPI는 다음과 같은 인간의 특징을 가지며, 본 논 문에서는 Robovie[7], Cog[8]와 같이 휴머노이드의 정의 (humanoid: having human characteristics or form)[9]에 따라 인간형(humanoid) 로봇으로 지칭한다.
1. 인간의 상체 형상을 갖고 있음(양팔, 손, 목, 머리) 2. 허리 및 무릎 자유도를 갖고 있어서 인간과 같은 허
리 움직임, 앉는 자세가 가능함
3. 각 링크가 인간의 비례와 유사하며, 각 관절의 작동 영역이 인간과 유사함
본 논문에서는 SEROPI의 하드웨어 및 소프트웨어에 대한 전반적인 내용을 다룬다.
2. 하드웨어 플랫폼
2.1 설계 개념
SEROPI는 인간 환경에서 인간과 같은 작업 영역을 갖 고 서비스를 수행하는 것을 목표로 개발되었다. 인간과 같은 작업영역을 갖고 서비스를 하기 위해서는 바닥과 테이블 위의 물체를 모두 핸들링 할 수 있어야 하고, 이 를 위해서는 앉고 서는 동작이 가능해야 한다. 일단 인간 환경의 변경 없이 생활이 가능해야 하고 친숙한 이미지 여야 하기 때문에 인간형으로 이미지를 잡았고, 안정적이 고 신속한 서비스, 계단 승강이 필요 없는 실내환경에서 사용된다는 조건 하에 바퀴기반의 이동체를 채택하였다.
또한 앉고 서는 동작을 위해서 허리와 무릎 관절을 포함 시켰다.
2.2 플랫폼의 구조
바퀴기반의 모바일베이스는 그림 3과 같이 두 개의 구 동바퀴와 두 개의 보조바퀴, 전원장치, 센서류 등으로 구 성되어 있으며, 그 상판 위에 무릎 관절이 위치한다. 로 봇의 중앙에 위치한 허리 관절은 그림 2과 같이 세 개의 관절(pitch, yaw, roll)로 구성된다. 허리관절 위의 몸통에는 로봇 전체의 운영 프로그램이 있는 상위 제어기와 내부 모터제어기 간 통신, 외부 통신 장치 등이 탑재되어 있으 며 양 팔과 머리가 장착되어 있다. 양 팔은 (주)로봇앤드 디자인의 6자유도 휴머노이드형 암을 사용하였다.
SEROPI의 세부 사양은 표 1과 같다.
그림 1. SEROPI
그림 2. 몸통 관절의 작동 영역
표 1. SEROPI 사양 크기 450×450×1250 mm
무게 55 kg
팔 6DOF × 2 핸드 2DOF × 2 몸통 4DOF 자유도
머리(목) 2DOF 모바일베이스 구동방식 differential drive
속도 max. 2 m/s 지면 접촉
다각형의 면적 76800 mm2
전원 24VDC 30Ah Li-polymer battery 상위 제어기 P4-M SBC
통신 인터페이스 CAN / RS-232(내부), Ethernet(외부)
센서
laser scanner (navigation용)
Force/Torque sensor (팔 끝단 force feedback) load-cell (ZMP 측정용)
표 2. 모바일 베이스 사양 크기 450×450×270 mm 무게 19.6 kg
wheel configuration 차동형 + 보조바퀴(swivel caster 2EA) 휠 크기 구동바퀴지름 200mm
보조바퀴지름 75mm
구동부
Brushless DC 모터(250W) 감속비 26:1
엔코더 500 pulse/turn
모션 제어기 허용전류: Continuous 10A, max. 25A CAN, RS-232C
센서 laser scanner (navigation용) load-cell (ZMP 측정용)
Load cell(4EA) Laser scanner
Battery BMS
그림 3. 바퀴기반 모바일 베이스
2.2.1 모바일 베이스
모바일베이스는 ‘퍼스널로봇 시스템엔지니어링기술 개발’ 과제의 2단계 1차년도에 개발된 CMR-P3의 모바 일 모듈을 기반으로 하였다[10].
가반하중 60kg 및 최대 2m/sec의 빠른 이동 속도를 위해 250W급 BLDC모터 2개를 차륜구동 방식으로 장 착하였다. 또한 안정된 자세 제어를 위해 4개의 기둥에 하중 감지 센서(load cell)가 있고, 로봇 전체에 전원을 공급하기 위한 battery와 전원 관리를 위한 BMS(Battery Management System)가 있다. 위치 인식 및 이동을 위해 레이져스케너, 초음파 센서, 적외선 센서가 탑재되어 있 으며 세부 사양은 표 2와 같다.
2.2.2 핸드
일반적으로 다양한 형태의 물체를 파지하기 위해서 관절의 수를 늘리고 각 관절의 수만큼 구동기가 필요 하다[11]. 따라서 부피가 커지고, 무게도 늘어나면서 로 봇 팔의 가반하중을 감소시키는 주된 원인이 된다. 또 한 한 관절과 그 다음 관절을 일정한 속비로 연결하여 하나의 구동기로 다관절을 움직이는 종속 메커니즘이 많이 사용되고 있지만[12], 이는 일정한 파지 형태만을 갖고 있어서 다양한 물체에 유연하게 대처하기가 어 렵다.
본 연구에서 개발된 핸드는 다점접촉의 감싸기가 가능한 형태이며 사양은 표 3과 같다. 주로 음료수 캔이나 컵 등의 실린더 형태의 물체를 잡는데 적합 하며, 순응성(compliance)이 있는 핑거구조이기 때문 에 다각형의 물체를 잡는 것도 가능하다. 그림 4와 같이 한 관절에 다음 관절의 작동 영역만큼의 수동 작동 영역을 주고, 구동기 힘과 파지력의 차보다 작 은 힘을 갖는 회전스프링으로 수동 작동 영역의 자 유 움직임을 구속하는 방법으로 기존의 종속 메커니 즘의 한계를 극복하고 유연한 물체 파지가 가능하게 하였다.
파지명령이 들어왔을 때 파지동작 및 정지동작 조건 은 아래와 같다.
그림 4. 핸드의 구조
표 3. 핸드 사양
형태 2지 핑거형
크기 150×90×80 mm
무게 450 g
가반 하중 500 g
전원 24VDC
통신 인터페이스 CAN
특징 경량, 4관절 / 2구동기, 물체 적응형
그림 5. 제어 구조
2.3 제어 구조
SEROPI는 그림 5와 같이 모터(DC, BLDC)를 제어하 기 위한 Servo Controller와 무게중심을 측정하기 위한 LoadCell 모듈, 손목의 토크 및 모멘트를 측정하기 위한 Force/Torque 모듈, 이동 시 장애물을 측정하기 위한 레 이저 스캐너, 바닥의 요철을 측정하기 위한 IR 모듈, 배 터리의 전압을 측정하기 위한 BMS(Battery Management
Stop Condition(NOT Grasping Condition):
((S1A=ON)OR(S1B=ON))
AND((S2A=ON)OR(S2B=ON)) Grasping Condition:
((S1A=OFF)AND(S1B=OFF))
OR((S2A=OFF)AND(S2B=OFF))
System), 영상을 획득하기 위한 카메라 등이 다양하게 구성되어있다. 이 모든 것을 중앙 제어를 할 경우 고성 능의 컴퓨팅 파워를 필요로 할 뿐만 아니라, 배선이 많 아지고 확장 및 유지 보수가 용이하지 않기 때문에 분 산 네트워크 시스템으로 구성하였다. SEROPI는 분산 네 트워크 시스템에서 사용되는 다양한 통신 매체 중 신뢰 성이 높고, 구현이 간단하여 구동기 및 센서 모듈에 많 이 사용되고 있는 CAN 네트워크를 사용하여 구현하였 다. 예외적으로 Laser Scanner의 경우 CAN 네트워크를 지원하지 않을 뿐만 아니라 데이터의 량이 많아서 네트 워크에 많은 부하를 주기 때문에 RS-232로 연결하였다.
3. 소프트웨어 플랫폼
3.1 소프트웨어 구조
SEROPI 구동 프로그램은 Windows XP 상에서 구동하 며, C++로 구현되었다. 구현된 프로그램은 크게 디바이 스 클래스(Device Class)와 태스크 클래스(Task Class)로 구성하였다. 디바이스 클래스는 각종 제어기 및 통신 네트워크를 추상화한 것으로 IDevComm(CAN, UART), IDevServoMotor(Servo Motor), IDevSensor(IR, Laser Scanner, BMS 등), IDevCamera(카메라)로 구성하였다. DevManager 는 SEROPI에 포함된 디바이스들을 디바이스 컨테이너 에 등록하고 초기화하는 클래스이다. 태스크 클래스는 전신공조 및 작업 등의 알고리즘이 구현된 클래스와 이 들 클래스를 동작모드 및 시간에 따라 관리하는 태스크 관리자(TaskManager)로 구성하였다. 그림 6는 소프트웨 어의 구조를 나타낸다.
그림 6. 소프트웨어 구조
그림 7. 스레드 구조
태스크 관리자는 그림 7과 같이 2개의 스레드(tMain, tSub)를 이용하여 SEROPI를 동작시킨다. 각각의 스레드 는 S/W 이벤트를 기다리고 있다가 일정한 주기로 동작 하는 Multi Media Timer에서 이벤트를 보내주면 동작을 한다.
tMain 스레드는 전신공조를 위한 것으로 항상 안정적 인 자세를 유지하기 위해 동작하며, 주기는 100Hz이다.
그 밖에 작업, 물체인식 등은 동작 모드 및 시간에 따라 tSub 스레드에서 동작하며 주기는 동작모드에 따라 1 ~ 10Hz로 변화한다.
3.2 알고리즘 3.2.1 자세 제어
SEROPI는 이족 보행 로봇에 비하여 안정된 시스템이 기 때문에 상대적으로 제어가 수월하다. 그러나 모바일 베이스의 지면 접촉 다각형의 면적이 크지 않기 때문에 상체의 자세에 따라 넘어질 수 있으며 이를 방지하기 위하여 자세 제어 알고리즘이 필요하다. 이러한 알고리 즘의 구현을 위해 모바일베이스의 앞의 좌·우, 뒤의 좌·
우 부분에 하중 측정을 위한 로드셀(load cell)이 장착되 어 있으며, 여기서 측정된 네 지점의 하중 데이터로 수 식 (1)을 이용하여 ZMP(Zero Moment Point)의 위치를 계 산한다.
(1)
여기서 fl, fr, bl, br은 그림 8과 같이 각각 전방 좌·우, 후방 좌·우의 로드셀을 의미하며, Fi는 해당 로드셀에서 측정된 힘이고, dx,i와 dy,i는 로드셀 위치의 x좌표, y좌표이
다. ZMP는 로봇의 동적인 상태까지 고려된 값이며, 이 값이 지면 접촉 다각형의 안전 영역에 있으면 로봇은 넘어지지 않는다고 판단한다. 보조 바퀴는 중심에서 편 심되어 있는 회전형 캐스터(swivel castor)이기 때문에 바 퀴의 위치에 따라 지면 접촉 다각형의 면적이 바뀌고, 바퀴의 위치를 예측하기 어렵기 때문에 그림 8과 같이 최소영역을 안전 영역 계산을 위한 기본 접촉 다각형으 로 정하였다. 지면 접촉 다각형의 면적이 이족 보행 로 봇에 비하여 상대적으로 크고, 팔의 무게가 몸통 무게 의 30% 이하이기 때문에 팔의 움직임이 로봇의 안정성 과 큰 관련이 없으며, 따라서 몸통의 움직임으로 안정 성을 확보할 수 있다고 가정한다.
몸통은 무릎 1자유도(pitch), 허리 3자유도(pitch, yaw, roll)로 구성되어 있으며, 여기서 pitch방향의 자세 제어 는 무릎의 pitch축을 이용하고, roll방향의 자세 제어는 허리의 roll축을 이용한다.
로봇의 동작 모드는 크게 두 가지이다. 첫째는 작업 모드이며, 물건을 집거나 기타 다른 이유로 로봇 팔을 사용하고 자세의 높·낮이를 조정하기 위해 허리를 이용 하는 경우이다. 이때에는 무릎 pitch축과 허리 roll축은 자세 제어를 담당하고 나머지 관절은 작업 명령을 따른 다. 둘째는 이동 모드로서 기본적으로 몸통의 자세 제 어 알고리즘은 동작하고 있는 상태이고 가속, 감속을 할 때 자세를 낮춤으로써 바퀴와 지면과의 접촉점에 걸 리는 모멘트를 감소시킨다. 이에 따라 ZMP의 급격한 변화를 줄여 줄 수 있다. 자세를 낮추는 동작은 허리의 pitch축을 이용하며, 관절 이동 경로(θpitch)는 식 (2)와 같 이 모바일베이스의 이동 속도(vmobile)에 비례하게 정하였 다. (K, a는 임의의 상수)
(2) 식 (3)의 ZMP 오차, CoM(Center of Mass)오차와 그 미 분값을 이용하고 식 (4)의 PD 제어기를 통하여 제어 출
그림 8. 지면접촉 다각형의 영역
그림 9. ZMP 궤적((a)제어함, (b)제어하지 않음)
력을 구하고 이 값과 CoM 자코비안을 이용하여 각 관절 의 입력값을 생성한다[10]. 여기서 ep,i 는 ZMP 오차, ec,i 는 CoM 오차, pi
d 와 pi는 목표와 현재 ZMP 위치, ci d 와 ci는 목표와 현재 CoM 위치, ui는 제어 입력을 의미한다.
(3)
(4)
그림 9는 최대 속도 0.7m/sec, 가속도 0.3m/sec2 로 2m 이동시켰을 때의 ZMP 궤적이다. 자세제어를 하지 않았 을 경우에도 ZMP가 안전 영역 내부에 있지만 ZMP의 변위 폭이 커짐을 볼 수 있고, 이로 인해 다소 불안한 것을 알 수 있다.
3.2.2 작업
SEROPI에서는 작업을 위해 시각 기반 매니플레이션 기술을 이용한다. 이는 물체를 인식하여 물체의 좌표를 획득하는 작업과 팔의 이동경로를 생성하여 이동하는 작업으로 나눌 수 있다.
물체를 인식을 위해 SIFT(Scale Invariant Feature Transform) 알고리즘을 이용해서 구현된 Evolution Robotics사의 라이브러리를 사용하였다. 이 알고리즘은 이미지에서 스케일에 불변하는 특징점들을 추출해서 그 점들을 매칭함으로써 물체를 인식하는 방법이다.
물체의 추적은 CAMSHIFT(Continuously Adaptive Meanshift) 알고리즘을 사용하는데 물체의 색상 정보를 이용하여 물체를 추적하는 알고리즘으로서, 추적하는 대상 물체의 컬러히스토그램을 기준으로 유사한 색상을 나타내는 부분을 계속적으로 추적하는 알고리즘이다.
작업 대상 물체의 공간상의 좌표를 얻어내야 한다. 물 체와의 거리를 측정하기 위해서 스테레오 카메라의 disparity 값이 필요하며, 우리가 사용한 방법은 CAMSHIFT를 통해 얻어진 좌우 이미지의 무게 중심점 의 disparity만을 활용하였다. 무게 중심은 일정한 물체 의 면적의 평균된 정보를 담고 있으므로 노이즈와 조명 변화에 적게 영향을 받는다.
xRe zRe yRe
xR10 zR10 yR10Wrist
xR9 zR9 yR9
xR8
zR8
yR8 xR7
zR7
yR7 xR6
zR6 yR6
Elbow 0.25m
0.25m
0.1m
xR5 zR5
yR5 xL5 zL5 yL5
xLe zLe yLe
xL10 zL10 yL10
xL9 zL9 yL9
xL8
zL8
yL8 xL7
zL7
yL7 xL6
zL6 yL6
75˚ 75˚
Shoulder
Right Arm Left Arm
0.2m
0.442m
0.342m
x4
z4
y4 x3
z3 y3
x2 z2
y2
x1
z1 y1 xb zb yb
Waist
그림 10. 로봇 좌표계
또한 한 점의 disparity 만을 구하게 되므로 아주 간단 히 물체의 거리를 결정할 수 있다[15].
작업을 위해 본 논문에서는 바퀴 및 허리의 일부를 제외한 16개의 자유도를 고려하여 그림9와 같이 로봇 좌표계를 정의하였다.
3.2.3 이동
그림10은 본 연구에서 개발된 주행부의 블록 다이 어그램이다. 지도(Map) 정보를 이용하여 위치추정 (localization)과 경로계획(path planning)을 수행하고, 로봇 주변에 임의로 나타나는 장애물을 기록한 지역지도 (Local Map) 정보를 이용하여 장애물 회피(Obstacle Avoidance)을 수행한다. 이동(Navigation)은 경로계획, 위 치추정, 장애물회피 알고리즘의 수행을 조정하며 로봇 이 목적위치로 이동하도록 한다. 각 알고리즘은 모듈로 분리되고 추상 인터페이스를 제공하여 그림 6의 소프트 웨어 아키텍처 상에서 추가 및 교체가 용이하다. 그리 고 HAL 계층의 센서 장치와 모터 장치를 사용하도록 하여 특정 로봇에서 개발된 알고리즘이 다른 로봇에 쉽 게 적용되어 사용된다.
지도는 사용자와 로봇에게 필요한 정보를 기록한 데 이터 베이스로, 세 가지 종류의 지도를 사용하는데, 지 도에서 객체의 위치를 기록한 객체 지도(object map) 및 벽과 장애물의 위치를 기록한 격자지도(grid map)과 기 하지도(geometry map)를 사용한다. 객체 지도는 로봇이 도달해야 할 특정 위치나 로봇이 주행 중 발견한 객체 를 기록한다. 사용자의 명령에 의해 정수기에서 물을 가져올 때, 객체지도 상의 컵의 위치, 정수기의 위치, 현 사용자의 위치 등이 사용된다. 격자지도와 기하지도는 로봇 주위 환경에 대한 정보를 가지고 있다. 이 지도는
로봇의 경로계획과 위치추정에 사용되며 각 알고리즘의 요구에 따라 선택적으로 사용된다. 본 연구에서 사용된 경로계획 알고리즘은 장애물을 표시하는 기하도형의 볼 록한 꼭지점을 잇는 최단 거리를 탐색하는데 기하지도 를 사용하도록 개발되었고 위치추정 알고리즘은 센서의 측정 데이터를 격자지도와 지도매칭(map-matching) 기법 으로 비교하게 된다.
경로계획은 기하지도의 장애물 정보로부터 임시로 위 상지도를 만든다. 위상지도는 기하도형의 볼록한 꼭지 점을 잇는 선분 중 장애물에 가려지지 않은 선분을 추
Navigation
Localization
Path Planning Obstacle
Avoidance
Map Local
Map
Motor Devices Sensor
Devices
HAL
Dead- reckoning
그림 11. 주행부의 블록 다이어그램
그림 12. SEROPI 서비스 예
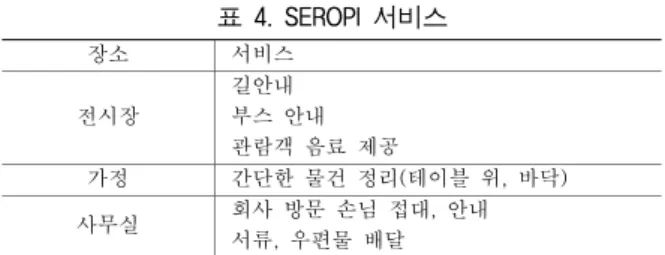
표 4. SEROPI 서비스
장소 서비스
전시장
길안내 부스 안내 관람객 음료 제공
가정 간단한 물건 정리(테이블 위, 바닥) 사무실 회사 방문 손님 접대, 안내
서류, 우편물 배달
출하여 노드와 아크로 기술한다. 위상지도 상에서 가상 의 로봇이 아크로 연결된 노드와 노드를 이동하는데, 이 때 경로의 길이, 노드에서의 회전각을 이동 비용으 로 고려하여 최단 경로를 탐색하게 된다.
위치추정 방법은 거리 센서를 이용하는 지도매칭 방 식이다. 이 방법은 몬테카를로 위치추정 방법(MCL, Monte Carlo localization)[13]을 기반으로 개발되었다. 로봇 에 장착된 다수의 거리 측정 센서에 대하여 센서에서 측정한 거리 값과 격자지도에서 계산된 거리 값의 오차 를 비교한다. 따라서, 알려지지 않은 장애물로 인해 일 부 센서 값이 신뢰성 있는 결과를 얻는다.
장애물 회피 알고리즘은 VFH(Vector Field Histogram)[14]
알고리즘을 기반으로 개발되었다.
4. 시연 시나리오
SEROPI는 가정이나 사무실 등의 실내환경에서 서비 스를 제공하기 위한 목적으로 개발되었다. 현재 진행중 이거나 앞으로 가능한 서비스들을 나열하면 표 4 및 그 림 11과 같다.
5. 결론 및 향후 계획
본 논문에서는 안정성, 실용성 측면에서 기존 서비스 로봇의 단점을 보완한 바퀴기반의 인간형 로봇인 SEROPI의 하드웨어 구조 및 탑재된 알고리즘, 소프트 웨어 구조 등을 설명하였다. SEROPI는 빠른 이동성, 제 어의 용이성, 인간과 같은 작업영역 등의 장점으로 향 후 2족형 휴머노이드와는 차별화된 범용 서비스로봇의 하나의 모델이 될 수 있을 것이다. 향후 다양한 실험을 진행하여 결과를 도출하고, 여러 응용분야를 찾아 실제 로 유용한 서비스를 제공할 수 있도록 해야 할 것이다.
[1] 로봇산업 조사통계, 산업자원부, 2006. 12
[2] Sakagami, Y., Watanabe, R., Aoyama, C., Matsunaga, S., Higaki, N., Fujimura, K., “The intelligent ASIMO: system overview and integration”, IEEE/RSJ International Conference on Intelligent Robots and System, vol. 3, p2478-p2483, 2002
[3] Kaneko, K., Kanehiro, F., Kajita, S., Yokoyama, K., Akachi, K., Kawasaki, T., Ota, S., Isozumi, T., "Design of prototype humanoid robotics platform for HRP", IEEE/RSJ International Conference on Intelligent Robots and System, vol. 3, p2431-p2436, 2002
[4] Fujita, M., Kuroki, Y., Ishida, T., Doi, T.T., "A small humanoid robot SDR-4X for entertainment applications", IEEE/ASME International Conference on Advanced Intelligent Mechatronics, vol. 2, p938-p943, 2003
[5] Hatano, M., Obara, H., "Stability evaluation for mobile manipulators using criteria based on reaction", SICE 2003 Annual Conference, vol. 2, p2050-p2055, 2003
[6] Yamamoto, Y., iaoping Yun, "Task space analysis of multiple mobile manipulator system", IEEE International Symposium on Computational Intelligence in Robotics and Automation, p338-p344, 1999
[7] Takayuki Kanda, Hiroshi Ishiguro, Tetsuo Ono, Michita Imai, and Ryohei Nakatsu, “Development and Evaluation of an Interactive Humanoid Robot “Robovie””, Proceedings of the 2002 IEEE International Conference on Robotics 8 Automation, p1848-p1855, 2002
[8] Brooks, R., Breazeal, C., Marjanovic, M., Scassellati, B., and Williamson, M., “The Cog Project: Building a Humanoid Robot”, In Computation for Metaphors, Analogy and Agents, vol. 1562, Springer-Verlag, p8-p13, 1998
[9] http://www.answers.com/humanoid, The American Heritage® Dictionary of the English Language, Fourth Edition Copyright© 2007, Houghton Mifflin Company [10] Youngjin Choi, Doik Kim, and Bum-Jae You, “On the
Walking Control for Humanoid Robot based on the Kinematic Resolution of CoM Jacobian with Embedded Motion”, IEEE International Conference on Robotics and Automation, p2655-p2660, 2006
[10] Moosung Choi, Kwang-Woong Yang, Dae-Heui Won, Joon-Woo Park, Sangduk Park,and Ho-Gil Lee,
“Development of a Personal Robot Considering Standardization”, ICCAS, p2243-p2247, 2005
참 고 문 헌
[11] J. Mira and J. R. Alvarez, “An AER-Based Actuator Interface for Controlling an Anthropomorphic Robotic Hand”, IWINAC, p 479-p489, 2007
[12] Byungjune Choi, Sanghun Lee, Sungchul Kang and Hyouk Ryeol Choi, “Development of Anthropomorphic Robot Hand with Tactile Sensor : SKKU Hand II”, Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, p3779- p3784 , 2006
[13] F. Dellaert, D. Fox, W. Burgard, and S. Thrun, “Monte carlo localization for mobile robots,” Proc. IEEE Int. Conf.
Robotics and Automation, pp.1322-1328, 1999
[14] J. Borenstein, Y. Koren, “The Vector Field Histogram - Fast Obstacle Avoidance for Mobile Robot”, IEEE Journal of Robotics and Automation, Vol. 7, No. 3, pp. 278-288, June 1991
[15] 김찬오, 최성, 정주노, 양광웅, 김홍석, “위치기반 비 주얼 서보잉을 위한 견실한 위치 추적 및 양팔 로 봇의 조작작업에의 응용”, 로봇공학회 논문지 제2 권 제2호, pp. 129-136, 2007
[16] Shigeki Sugano, “Design of Humanoid Robot for Human- Robot Interaction –Waseda Robots: Wendy and Wamoeba-”, IEEE International Conference on Robotics and Biomimetics(ROBIO), pp. 16-19, 2005
김 홍 석 1980 서울대학교 공과대학
전기공학과 (공학사) 1983 서울대학교 대학원 제
어계측공학과 (석사) 1990 서울대학교 대학원 제
어계측공학과 (박사) 1983~1987 한국과학기술연구원 응용전자연구실 연
구원
1990~1991 한국과학기술연구원 응용전자연구실 연수 연구원
1991~현재 한국생산기술연구원 로봇기술개발본부 제 어 지능연구팀 수석연구원
관심분야 : 제어이론, 제어기 설계 및 평가, 시뮬레이션 (simulation), 전자회로, 마이크로프로세서 /DSP 응용, 로보틱스 및 S/W 개발환경
양 광 웅 1996 인하대학교 자동화공학
과 (공학사)
1998 인하대학교 자동화공학 과 (석사)
1998~2002 ㈜두산메카택 근무
2002~현재 한국생산기술연구원 근무
관심분야 : robot software architecture, distributed Computing, software engineering
최 무 성
2001 한양대학교 기계공학부 (공학사)
2003 한양대학교 정밀기계공 학과 (석사)
2003~현재 한국생산기술연구 원 근무
관심분야 : human-like intelligent systems, Robot hardware platform design, biped robot
신 은 철 2003 선문대학교 전자/제어
계측공학과 (공학사) 2005 선문대학교 제어계측공
학과 (석사)
2005~현재 한국생산기술연구 원 근무
관심분야 : 실시간 시스템/운영체제, 임베디드 운영체제