CopyrightⒸ2016 KSAE / 145-02 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2016.24.6.627 Transactions of KSAE, Vol. 24, No. 6, pp.627-634 (2016)
차선 이탈 경고 시스템의 성능 검증을 위한 가상의 오염 차선 이미지 및 비디오 생성 방법
곽 재 호․김 회 율*
한양대학교 전자컴퓨터통신공학과
Virtual Contamination Lane Image and Video Generation Method for the Performance Evaluation of the Lane Departure Warning System
Jae-Ho Kwak․Whoi-Yul Kim*
Department of Electronics and Computer Engineering, Hanyang University, Seoul 04763, Korea (Received 30 May 2014 / Revised 29 September 2015 / Accepted 17 August 2016)
Abstract : In this paper, an augmented video generation method to evaluate the performance of lane departure warning system is proposed. In our system, the input is a video which have road scene with general clean lane, and the content of output video is the same but the lane is synthesized with contamination image. In order to synthesize the contamination lane image, two approaches were used. One is example-based image synthesis, and the other is background-based image synthesis. Example-based image synthesis is generated in the assumption of the situation that contamination is applied to the lane, and background-based image synthesis is for the situation that the lane is erased due to aging. In this paper, a new contamination pattern generation method using Gaussian function is also proposed in order to produce contamination with various shape and size. The contamination lane video can be generated by shifting synthesized image as lane movement amount obtained empirically. Our experiment showed that the similarity between the generated contamination lane image and real lane image is over 90 %. Futhermore, we can verify the reliability of the video generated from the proposed method through the analysis of the change of lane recognition rate. In other words, the recognition rate based on the video generated from the proposed method is very similar to that of the real contamination lane video.
Key words : Augmented video generation(가상비디오생성), Performance evaluation(성능평가), Intelligent vehicle (지능형자동차), Intelligent vehicle vision system(지능형자동차비전시스템)
1. 서 론1)
최근 카메라 기술의 발달과 자동차에 대한 소비 자 인식이 변화함에 따라 전자 시스템을 적용한 미 래형 지능형 자동차 기술 개발이 활발히 이루어지 고 있다.1-3) 그 중에서도 특히, 운전자나 보행자의 안 전을 위한 지능형 자동차 안전 기술11) 대한 연구가 매우 중요한 이슈로 부각되고 있다. 지능형 자동차
*Corresponding author, E-mail: [email protected]
안전 기술이란 종래의 자동차 기계기술에 IT 기술 과 전자제어기술 등의 융합을 통해 차량의 결함, 사 고 예방 및 회피, 출동 등 위험상황으로부터 운전자 및 탑승자, 그리고 보행자를 보호하여 교통사고 및 피해를 획기적으로 줄일 수 있는 기술을 말한다.
지능형 자동차 안전 기술들은 다양한 센서4)융합 을 이용하여 구현된다. 특히, 최근에는 가격이 저렴 한 다양한 영상 센서들의 등장으로 영상 기반의 비 전 기술을 이용한 안전 기술들이 많이 개발되고 있
곽재호․김회율
으며, 차선 이탈 방지 시스템(Lane Departure Warn- ing System, LDWS),12) 전방 추돌 방지 시스템(Forward Collision Warning System, FCWS),12) 졸음운전 방지 시스템(Driver Monitoring System, DMS)12) 등이 대표 적이 예이다. 비전 기반 지능형 자동차 안전 기술의 핵심은 차량에 장착된 영상 장비(카메라)를 통해 자 동차 안전에 도움이 되는 정보나 사고를 유발할 수 있는 요인을 사전에 탐지하는 기술이다.
그러나 이러한 비전 기반 지능형 자동차 안전 기 술들이 상용화되기 위해서는 반드시 몇 가지 한계 점을 극복해야한다. 그 중에서도 가장 중요하고 기 본이 되는 것은 시스템의 신뢰성이다. 비전 기반 기 술들의 경우, 눈이나 비, 안개 등과 같은 기상 악조 건이나, 야간, 역광 등과 같은 열악한 조명 환경 아 래에서는 그 성능이 매우 떨어진다는 단점이 있다.
따라서 비전 기반 안전 기술들이 높은 신뢰성을 확 보하기 위해서는 반드시 이러한 악조건 상에서의 성능 검증이 필요하다. 그러나 이러한 다양한 기상 및 조명 환경에서 기술들에 대한 성능을 검증하는 것은 시간적으로나 장소적인 제약 조건으로 인해 쉬운 일이 아니다. 따라서 이러한 성능 검증을 효율 적으로 할 수 있는 방법에 대한 연구가 필요하다.
본 논문에서는 비전 기반 지능형 자동차 기술의 효율적인 성능 검증을 위한 가상의 성능 검증용 비 디오 생성 방법을 제안한다. 다양한 안전 기술들 중 에서도 특히, 차선 이탈 방지 시스템의 성능 검증을 목적으로 하는 가상의 오염된 차선 영상 생성에 초 점을 맞추고자 한다.
2. 관련연구
본 절에서는 자동차 성능 평가를 위한 시뮬레이 션 개발과 관련된 기존의 연구들을 살펴보고자 한 다. 또한 본 논문에서 제안하는 오염된 차선 이미지 생성 기법에 기반이 되는 영상 합성 기법에 대한 기 존 연구들도 고찰해보고자 한다.
2.1 자동차 성능 검증을 위한 시뮬레이션 개발
Kim5) 등은 2차 충돌 회피 알고리즘 개발을 위한 충돌 시뮬레이션 환경 개발 방법을 제안했다. 이 논
문에서는 충동 모델, 저자유도 모델, 충돌 환경 모사 알고리즘 및 차량 동역학 해석 툴과 같은 4개의 모 듈을 결합하여, 2차 충돌 방지를 위한 Post-crash 시 스템 연구에 필요한 시뮬레이션 환경을 구축하였다.
Ki6) 등은 충돌예방시스템 시험평가를 위한 VR (Virtual Reality) 시뮬레이션 시스템 개발방법을 소 개하였다. 이 논문에서 Ki는 실제와 같은 교통상황 과 차량의 움직임 등을 모사하여 운전자에게 현실 감 있는 교통 환경을 제공할 수 있는 VR 시뮬레이터 를 제안하고 이를 기반으로 각 목적에 맞는 시험 모 드를 기반으로 신뢰성 높은 평가 데이터를 수집하 였다.
Jang7) 등은 운전자 인지반응 연구를 위한 VR 시 뮬레이션 시스템을 개발하였다. 이 연구는 FCWS 설계 시 운전자 인지반응을 고려하기 위한 가상의 시뮬레이션 개발을 목적으로 하고 있다. Jang은 차 량동역학 모델과 VR을 연계하여 시뮬레이션을 했 을 때, 프레임율이 40 fps의 성능을 나타낼 수 있도 록 그래픽 렌더링 프로그램을 구성하였으며, 폴리 콘(polygon) 분산과 프레임 스키핑(frame skipping) 기법을 사용하여 안정적인 랜더링 성능을 얻을 수 있도록 하였다.
2.2 이미지 합성 기법
Efros 와 Leung8)은 비모수 샘플링(Non-parametric sampling) 방법에 기반한 이미지 합성 방법을 제안 하였다. Efros는 샘플 예제 이미지의 픽셀을 기반으 로 출력 합성 이미지를 생성하면서, 사용자 설정 윈 도우를 기반으로 출력 이미지의 안쪽에서부터 바깥 쪽으로 픽셀을 복사하는 기법을 활용하였다. 이 방 법은 매우 쉽고 간단하지만, 사용자 설정 윈도우의 크기에 따라 연산량이 늘어나 속도가 느려지는 단 점이 있다.
Wei와 Levoy9)는 Efros와 Leung8)의 방법을 개선 하여, 고정된 크기의 윈도우를 사용함으로써 속도 를 개선하였다. 또한 픽셀을 복사하는 순서도 Efros 와 달리 주사선 순서11)를 이용하여 다양한 합성이 가능하도록 하였다. 본 논문에서는 Wei의 방법에 기반을 두어 오염 이미지를 합성하였다.
Zhang과 Liu10)는 주파수에 기반을 둔 이미지 합
차선 이탈 경고 시스템의 성능 검증을 위한 가상의 오염 차선 이미지 및 비디오 생성 방법
성 방법을 제안하였다. 예제 샘플 이미지와 합성의 대상이 되는 이미지를 모두를 FFT(Fast Fourier Transform)를 이용하여 주파수로 변환한 후 각 이미 지에서 목적하는 이미지 정보를 추출한 후 두 정보 를 결합하여 이미지를 합성하였다. 제안된 방법은 주파수를 기반으로 영상을 합성했다는 점에서 특이 점이 있으나, 샘플 이미지가 대상 이미지와 크기가 같아야 한다는 제약이 있다.
3. 오염 이미지 생성 방법
본 논문에서는 두 가지 방법을 이용하여 열악(劣 惡)화 된 차선 이미지를 생성 하였다. 하나는 배경 기반 이미지 합성 방법이고, 다른 하나는 예제 기반 이미지 합성 방법이다. 배경 기반 이미지 합성법은 실제 도로상에 차선이 노후화되어 지워진 상황을 구현하기 위한 것으로, 차선 주변의 도로 배경을 이 용하여 차선을 지우거나 왜곡시키는 방법이다. 예 제 기반 이미지 합성법은 실제 도로상의 차선에 모 래나 먼지등과 같은 오염이 인가되어 차선이 가려 진 상황에 대응하기 위한 것으로써, 오염 예제 샘플 이미지를 이용하여 차선 영역에 이미지를 합성 하 는 방법이다. 예제 기반 이미지 합성 방법은 Wei와 Levoy9)의 방법에 기반을 둔다.
3.1 배경 기반 오염 이미지 합성
실제 도로상에는 Fig. 1과 같이 차선이 노후하여 지워진 경우가 많이 존재한다. 이렇게 노후화된 차 선은 LDWS 시스템의 성능에 많은 영향을 끼친다.
Fig. 1 Erased lane due to aging
Fig. 2 Background-based image synthesis
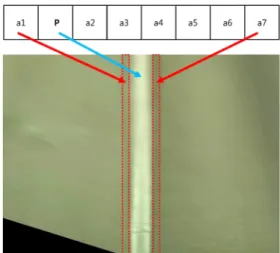
배경 기반 오염이미지 합성은 Fig. 2와 같이 검출 된 차선의 주변 도로 배경을 이루는 픽셀들을 이용 하여 이루어진다. 차선을 구성하는 픽셀 P를 중심으 로 좌우에 존재하는 도로 배경 픽셀 a 1 ~ a 7에 대해 거리의 비를 가중치로 이용하여 이미지를 합성한 다. 이를 식으로 표현하면 식 (1)과 같다.
(1)
3.2 예제 기반 오염 이미지 합성
일반적으로 도로상에 차선이 오염 되는 상황은 차선이 노후화되어 지워진 것뿐만 아니라, Fig. 3처 럼 먼지나 오염에 의해 차선이 가려진 경우도 많이 있다.
차선에 오염이 인가된 상황은 이미지 상에서 차 선을 구성하는 픽셀이 오염 이미지 픽셀로 합성되 었다고 볼 수 있다. 따라서 본 논문에서는 Wei가 제 안한 이미지 합성 방법을 이용하여 오염된 차선 이
Fig. 3 Obscured lane by contamination
Jae-Ho Kwak․Whoi-Yul Kim
Fig. 4 Example-based image synthesis
미지를 생성하였다. 즉, 사용자로부터 입력받은 오 염 예제 이미지를 차선 영역에 합성함으로써 오염 된 차선 이미지를 생성할 수 있다. Fig. 4는 Wei가 제 안한 이미지 합성 방법을 보인 것이다.
Wei는 이미지 합성의 초기 단계에 랜덤 노이즈를 이용하여 초기 출력 결과를 생성하였다. 그리고 고 정된 크기(5×5) 윈도우를 이용하여 예제 오염 이미 지에서 가장 유사한 값을 가지는 픽셀 위치를 찾아 이를 출력 이미지의 픽셀로 대체하는 방식으로 이 미지를 합성하였다.
4. 비디오합성
LDWS 시스템의 보다 신뢰성 있는 성능을 위해 서는 3장에서 언급한 정지 이미지에서의 이미지 합 성 방법을 동영상, 즉, 비디오 합성으로 확대 적용할 필요가 있다. 실제로 LDWS의 성능 검증은 단순히 하나의 이미지 상에서 이루어지는 것이 아니라 차 량이 실시간으로 주행 중인 상황에서 이루어진다.
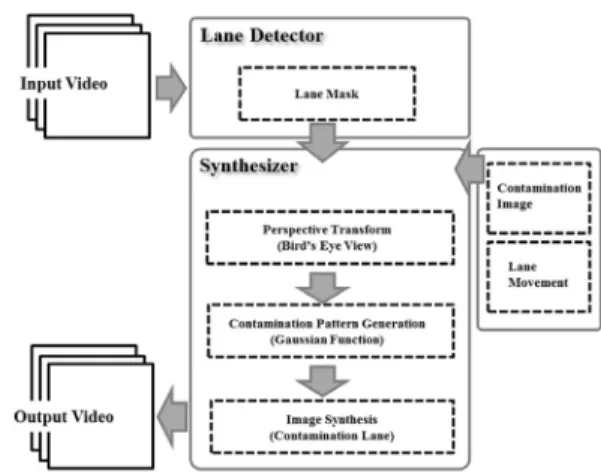
따라서 시간축을 기준으로 한 비디오 상에서의 합 성이 반드시 필요하다. Fig. 5는 비디오 합성과정을 보인 것이다.
비디오 합성을 위해 가장 먼저 시간축을 기준으 로 연속적으로 입력되는 입력 프레임을 차선 검출 기(lane detector)에 입력하여 오염을 합성하고자 하 는 차선을 검출한다. 검출된 차선 정보와 입력 프레 임은 이미지 합성기(synthesizer)로 전달되고 이미지 합성기는 3장에서 언급한 이미지 합성 방법을 이용 하여 차선에 오염 이미지를 인가하거나, 차선을 지 운다. 이때, 이미지 합성기는 이미지 합성을 효율적
Fig. 5 Video synthesis process
으로 수행하기 위해 입력된 차선 이미지를 4.1절에 서 언급한 투시 변환(perspective transform)을 이용 하여 조감도(bird’s eye view)로 변환한다. 또한 다양 한 크기와 형태의 오염 패턴을 생성하기 위해 4.2절 에서 언급한 가우시안 함수 기반 오염 패턴을 생성 하여 활용한다. 이렇게 오염 합성이 완료된 연속된 프레임들이 최종적으로 비디오 출력으로 나타난다.
4.1 투시변환
투시변환13)은 3차원 기하학 공간상의 점들을 2차 원 이미지 평면상의 점들로 매핑할 때 사용하는 기 하학 변환의 한 기법으로 식 (2)와 같이 표현된다.
(2)
이때, X 는 공간 평면상에 사각형의 네 점을 구성하 는 벡터이고, 는 이미지 평면상의 사각형의 네 점 을 구성하는 벡터이다. H는 투시변환행렬이다.
식 (2)에서 변환행렬 H를 구하기 위해서는 이미 지 평면과 공간 평면상에 매칭 되는 4쌍의 점이 필 요하다. Fig. 6은 투시변환을 구하기 위한 4개의 매
Fig. 6 Target points for the perspective transform
Virtual Contamination Lane Image and Video Generation Method for the Performance Evaluation of the Lane Departure Warning System
Fig. 7 Bird’s eye view of actual lane image
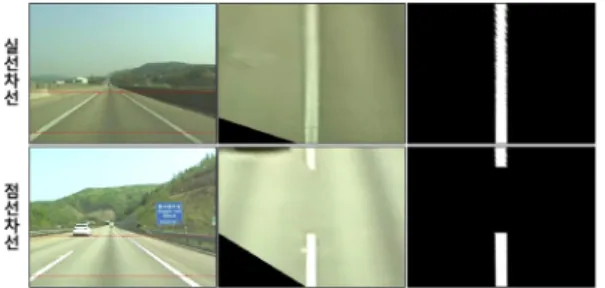
칭 점을 보인 것이다. 실제 차선 이미지에서 왼쪽, 오른쪽 각각 차선에 대해 제일 상단의 두 점과 제일 하단의 두 점을 기준으로 투시변환을 수행한다. Fig. 7 은 투시변환을 통해 생성된 차선 이미지의 조감도 이다.
4.2 가우시안 함수 기반 오염 패턴 생성 실제로 차선에 인가된 오염의 경우 Fig. 1이나 Fig. 3과 같이 다양한 모양과 크기를 가진다. 본 논문 에서는 이러한 다양한 모양과 크기의 오염 형태를 생성하기 위해 가우시안 함수 기반 오염 패선 생성 기법을 제안한다.
일반적으로 식 (3)의 가우시안 함수의 경우 진폭 A와 표준편차 σ의 조절로 다양한 함수 생성이 가능 하다. Fig. 8은 다양한 형태의 가우시안 함수를 보인 것이다.
× exp
(3)이러한 다양한 형태의 가우시안 함수들의 가중치 합으로 Fig. 9와 같은 다양한 형태의 오염 패턴 생성 이 가능하다.
Fig. 8 The change of Gaussian function according to the amplitude(A) and the standard deviation(σ)
Fig. 9 Various forms of contamination pattern using the weighted sum of Gaussian functions
4.3 오염이 인가된 차선 이미지 생성 3장에서 언급한 이미지 합성 기법과 4.1절에서 생 성된 차선의 조감도, 그리고 4.2절에서 생성된 오염 패턴을 이용하여 오염된 차선 이미지를 생성한다.
Fig. 10은 이 과정을 보인 것이다. Fig. 10(a)는 3장에 서 언급한 이미지 합성법을 이용하여 오염 이미지 를 생성한 결과이고 Fig. 10(b)는 실제 차선의 조감 도 이다. 이 두 이미지를 알파블랜딩14)을 이용하여 최종 합성한다. 알파블랜딩은 두 장의 이미지를 자 연스럽게 합성하는 기법으로 알파채널을 벌도로 두 어 투명도를 조절함으로써 두 이미지가 자연스럽게 합성된다. 알파블랜딩의 알파 가중치는 Fig. 10(c)의 오염 패턴을 이용하였다. Fig. 10(d)는 최종적으로 생성된 오염이 인가된 차선 이미지이다.
Fig. 10 Generation of contamination lane image 4.4 차량속도에 따른 영상 이동
차량이 주행 중에 촬영된 영상의 경우 시간의 흐
곽재호․김회율
Fig. 11 Lane moving amount according to the speed of the vehicle
름에 따라 영상 내의 차선은 이동하게 된다. 따라서 비디오 상에서 오염된 차선을 생성하기 위해서는 차선의 이동에 맞게 오염 이미지를 이동시켜야 한 다. 차선의 이동 속도에 맞게 오염 이미지를 이동시 키기 위해 실제 차량을 40 km/h에서 160 km/h로 주 행하면서 영상을 촬영하고 이를 기반으로 이동량을 모델링하였다. Fig. 11은 차량 이동 속도에 따른 차 선의 이동량을 모델링한 것이다.
5. 실험결과
본 절에서는 앞에서 언급한 과정을 통해 생성된 가상의 오염된 차선 이미지와 실제 오염된 차선 이 미지와의 유사도를 정량적으로 비교하였다. 그리고 H사의 상용화된 차선 인식기를 기준으로, 실체 오 염된 차선 영상과 제안된 방법으로 생성된 오염 차 선 영상에 대한 차선 인식률 변화를 분석하여 제안 한 방법을 통해 생성된 결과물에 대한 신뢰성을 검 증하였다.
5.1 유사도 비교
제안한 방법을 통해 생성한 가상의 오염 차선 이 미지에 대한 신뢰성을 검증하기 위해 실제 오염 차 선 이미지와의 유사도를 평가하였다. 유사도 평가 는 정량적 평가와 정성적 평가의 두 가지 방법을 사 용하였다. 정량적 평가를 위해 히스토그램 상관관 계(Histogram Correlation) 기법을 활용하였으며, 정 성적 평가는 영상처리 전문가 14명에게 각각 다른 색상의 실제 오염차선 한 장과 가상으로 생성한 오 염차선 아홉 장의 이미지를 보여주며 설문을 통해
유사도를 평가하였다. 히스토그램 상관관계에 기반 을 둔 유사도 평가는 각 이미지에서 히스토그램을 추출하고 이 히스토그램들 사이의 유사도를 비교하 는 것이다. 이는 오염패턴이 상이하지만 전체적으 로 비슷한 형태를 보이는 경우에 대한 유사도 평가 에 매우 유용하다.
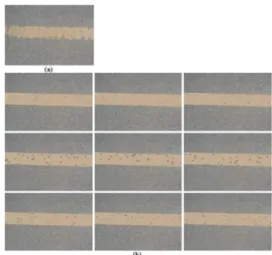
두 이미지의 유사도에 대한 정량적 평가를 위해 두 가지 색상의 차선을 선택하였다. 하나는 노란색 차선이고, 다른 하나는 가장 일반적인 흰색차선 이 다. 그리고 보다 다양한 오염에 대한 유사도 평가를 위해 차선이 조금 지워진 경우(경우1), 차선이 중간 정도 지워진 경우(경우2), 그리고 차선이 많이 지워 진 경우(경우3)의 세 가지로 나누어 유사도를 평가 하였다. 각 경우에 대해 9장의 가상의 오염 차선 이 미지를 Fig. 12처럼 생성하고, 이들과 실제 오염 차 선 이미지와의 히스토그램 상관관계에 대한 평균으 로 평가하였다.
Table 1은 히스토그램 상관관계를 이용한 오염 차 선에 대한 정량적 유사도 평가 결과이며, 전체적으 로 87 % 이상의 유사도를 보인다. 그러나 흰색 차선 이 조금 지워진 경우는 다른 것들에 비해 낮은 유사 도를 보인다. 이는 가상으로 생성된 오염 차선의 패
Fig. 12 Real (a) and generated (b) contamination lane image
Table 1 Quantitative similarity measure
차선색 경우1 경우2 경우3
노란색 92.5 98.4 88.3
흰색 82.7 92.8 87.2
차선 이탈 경고 시스템의 성능 검증을 위한 가상의 오염 차선 이미지 및 비디오 생성 방법
Table 2 Qualitative similarity measure
차선색 경우1 경우2 경우3
노란색 64.0 62.0 60.9
흰색 62.2 62.3 58.5
턴과 실제 오염 차선과의 패턴이 서로 상이하기 때 문이다.
Table 2는 영상 처리 전문가 14인의 설문을 통해 정성적으로 평가한 유사도 이다. 전문가는 본인이 속한 연구실의 석・박사 14명을 대상으로 선정 하였 으며, 가상으로 생성된 오염 차선이미지와 실제 오 염 차선 이미지를 보여주며 얼마나 유사한지를 0 %
~ 100 %로 직관적으로 평가하도록 하였다. 설문을 통한 정성적 평가의 경우 평가자 개인의 주관적인 의견이 들어간다는 점에서 객관성이 떨어질 수 있 으나 본 논문에서는 사람의 눈으로 보는 유사도를 평가해봄으로써 기계적으로 평가하는 것과는 달리 이미지 전체를 기준으로 얼마나 비슷하게 느끼는지 를 평가해 볼 수 있다는 점에서 의미를 가진다 하겠 다. Table 2에서 보는 바와 같이 설문에 의한 정성적 평가는 히스토그램 유사도 평가와 달리 낮은 유사 도 보였다. 이는 전문가들이 가상으로 만들어진 차 선에 대해 이질감을 많이 느낀다는 것을 말해준다.
여기에서 한 가지 흥미로운 것은 오염에 의해 차선 이 많이 지워진 경우(경우3) 가장 유사도가 낮게 나 타났다. 즉, 설문 대상자들은 차선이 많이 지워져서 차선이 원래의 모양을 상실할수록 실체 차선이미지 와 유사도가 많이 떨어진다고 느낀다는 것이다. 이 는 정량적 평가에서도 비슷한 결과를 보인다.
5.2 차선인식률 변화 분석
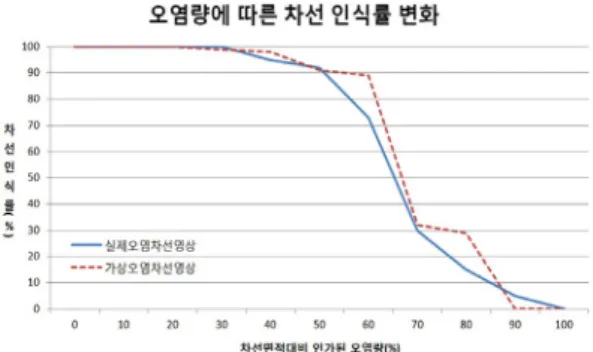
제안된 방법으로 생성된 오염된 차선 영상의 신 뢰성을 검증하기 위해 인가된 오염에 량에 따른 차 선 인식률의 변화를 분석하였다. 분석 대상이 된 차 선 인식기는 현재 H사가 상용한 제품을 기준으로 하였다. 실제 도로상에 차선 상에 오염의 량을 다르 게 변화시켜 가면서 영상을 촬영하고 이를 기반으 로 차선 인식률을 변화를 분석하였다. 또한 제안한 방법을 통해 인가된 오염의 량을 변화시켜 가면서 2
~ 3분 분량의 비디오를 생성하고 생성된 비디오의 모든 프레임에 대한 평균으로 차선 인식기의 인식
Fig. 13 Analysis of lane recognition rate according to the amount of contamination
률 변화를 분석하였다. Fig. 13에서 가로축은 오염의 량을 나타내며 오염의 량은 전체 차선 면적 대비 오 염이 덮은 차선 면적으로 %로 측정하였다. 그림에 서 보듯이 가상으로 생성된 오염 영상의 경우 실제 오염 영상과 비슷한 형태의 차선 인식률을 보임을 알 수 있다.
6. 결 론
본 논문에서는 LDWS 시스템의 성능 검증을 위 한 오염된 차선 이미지 및 비디오 생성 방법을 제안 하였다. 차선에 오염이 인가된 상황과 차선이 노후 하여 지워진 상황 각각에 맞게 대응하기 위하여 예 제 기반 이미지 합성법과 배경 기반 이미지 합성법 을 활용하였다. 또한 실제 도로상에 존재하는 다양 한 형태와 크기의 오염을 모델링하기 위하여 가우 시안 함수 기반 오염 패턴 생성 기법을 제안하였다.
오염된 차선을 포함하는 비디오 생성을 위하여 투 시변환을 이용 차선을 조감도 형태로 변환한 후 오 염을 인가하고 이를 다시 투시 변환하는 과정을 통 해 최종 오염 차선을 생성하고, 차량의 이동 속도에 따른 차선의 이동량을 실험적으로 구하여 이를 기 반으로 오염 이미지를 이동함으로써 비디오 합성을 구현하였다. 실험을 통하여 합성 된 오염 이미지가 실제 오염 이미지와 유사도가 매우 높음을 확인하 였으며, 차선 검출률의 변화 분석을 통해 생성된 오 염 차선 비디오의 효율성을 검증하였다.
향후, 차선에 오염을 인가하는 것뿐만 아니라 다 양한 기상상황이나 조명 환경 등을 추가적으로 고 려한 연구가 진행된다면, 보다 효율적이고 신뢰성
Jae-Ho Kwak․Whoi-Yul Kim
있는 검증용 시뮬레이터 개발이 가능할 것으로 사 료된다.
후 기
본 연구는 미래창조과학부 및 정보통신산업진흥 원의 대학 IT 연구센터 육성지원사업의 연구결과로 수행되었음(NIPA-2014-H0301-14-1018).
References
1) S. W. Lee, “Intelligent Transport System in Japan,” Transactions of KSAE, Vol.25, No.5, pp.48-51, 2003.
2) T. Gandhi and M. M. Trivedi, “Pedestrian Protection System: Issues, Survey, and Chal- lenges,” IEEE Transaction on Intelligent Trans- portation System, Vol.8, No.3, pp.413-420, 2007.
3) R. Bishop, “A Survey of Intelligent Vehicle Applications Worldwide,” IEEE Intelligent Vehicles Symposium, pp.25-30, 2000.
4) L. Vlacic, M. Parent and F. Harashima, “Intel- ligent Vehicle Technologies,” Butterworth Hei- nemann, Oxford, 2001.
5) D. Y. Kim, S. W. Jo, M. W. Soh, J. J. Kwon, T.
W. Hong and K. H. Park, “Development of Crash Simulation Environment for Developing Secondary Crash Avoidance Algorithm,” KSAE Annual Conference Proceedings, pp.510-513, 2013.
6) S. Y. Ki, H. K. Lee and I. B. Yang, “Develop-
ment of VR Simulation System for the Col- lision Avoidance System Test and Evaluation,”
KSAE Fall Conference Proceedings, pp.521- 521, 2008.
7) S. Jang, S. J. Kwon, J. H. Chun, K. Y. Cho and M. W. Suh, “Development of the VR Simu- lation System for the Study of Driver’s Percep- tive Response,” Transactions of KSAE, Vol.13, No.2, pp.149-156, 2005.
8) A. A. Efros and T. K. Leung, “Texture Synthesis by Non-parametric Sampling,” IEEE Int. Conf.
on Computer Vision, Vol.2, pp.1033-1038, 1999.
9) L. Y. Wei and M. Levoy, “Fast Texture Syn- thesis Using Tree-structured Vector Quantiza- tion,” SIGGRAPH, pp.479-488, 2000.
10) X. Zhang and S. Liu, “Texture Transfer in Frequency Domain,” 6th Int. Conf. on Image and Graphics, pp.123-128, 2011.
11) D. H. Jeong, “Intelligent Safety System Techno- logy Trends,” Korea Automotive Technology Institute, pp.1-5, 2012.
12) J. K. Lee and I. S. Lee, “Intelligent Advanced Safety Vehicle Technology Development,”
Auto Journal, KSAE, Vol.28, No.4, pp.22-27, 2006.
13) Wikipedia, 3D Projection, http://en.wikipedia.
org/wiki/3D_projection, 2014.
14) Wikipedia, Alpha Compositing, http://en.wikipedia.
org/wiki/Alpha_blending#Alpha_blending, 2014.