한국정밀공학회 2013년도 춘계학술대회논문집
소장의 기계적 특성 측정에 관한 연구
Investigation of Measurement of Mechanical Properties of Small Intestine
*
김창 래
1, 김영태
2,
#김대 은
1*C. L. Kim
1, Y. T. Kim
2,
#D. E. Kim([email protected])
11연세대학교 기계공학과, 2Institute for Computational Medicine, Johns Hopkins University
Key words : Small intestine, Strain, Stress, Tensile test
1. 서론
부드러운 생체 조직의 기계적 특성에 관한 연구 는 기초 과학적 흥미와 종양 제거, 조직 이식, 수술용 미소 기기, 캡슐형 내시경 등 다양한 의료적인 적용 으로 인해 그 중요성이 부각되고 있고, 지난 수십 년 간 다방면의 활발한 연구가 진행되고 있다[1-5]. 특 히, 자가 구동을 하는 캡슐형 내시경 마이크로 로봇 의 개발에 대한 관심이 커지면서 본 로봇의 활동 영 역인 gastrointestinal tube 에 대한 연구가 진행되고 있 다. 그 중에서도 위와 대장을 잇는 가장 길고 내경이 좁은 소장에 대한 연구는 다른 부위에 대한 연구보 다 미미하며 그 구조의 특성상 많은 연구가 필요로 되고 있다.2. 실험방법 및 결과
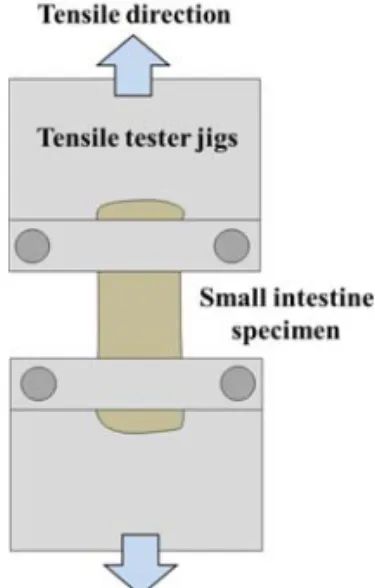
본 연구에서는 돼지 소장의 물성을 파악하기 위 해 Fig. 1과 같이 일반적인 인장실험(tensile test) 방법 을 이용하였다. 돼지의 소장을 절개하여 시편을 준 비하였다. 인장실험 시, 다양한 변수들에 따른 소장 시편의 기계적 특성 변화를 관찰하였다. 소장 고유 의 물성 측정뿐만 아니라 실험 조건에 따른 생체 조 직의 변화를 파악하였다. 이를 통해, 소장의 인장변 형률(strain)에 따른 인장응력(stress)의 변화를 파악 하였다. 길이 방향으로 절개한 시편에 대해 연속 3회 반복 인장 시키는 실험에서 모든 조건은 같게 하고 인장 속도에 변화를 주어 그 관계를 비교하였다. 또 한, 스트레인이 큰 경우와 작은 경우에 같은 시편에 대한 반복 인장실험에서 다른 결과가 도출됨을 확인 하였다. 이러한 이유로 가능한 작은 스트레인 영역 범위 안에서 세 가지 다른 방향으로 절개한 시편들 에 대해 인장실험을 실시하여, 소장의 인장 방향에 대한 물성을 파악할 수 있었다.Fig. 1 Schematic design of the tensile tester
3. 결론
돼지 소장에 대한 인장실험을 통해 소장의 물성 을 파악하고 다양한 실험 조건의 변화를 토대로 생체조직의 기계적 특성을 파악할 수 있었다. 이러 한 연구는 생체 조직의 이식과 수술용 미소기기 및 캡슐형 내시경 마이크로 로봇의 개발에 기초 연구로 활용될 것으로 기대된다.후기
이 논문은 2012년도 정부(교육과학기술부)의 재원 으로 한국연구재단의 지원을 받아 수행된 연구임 (No. 2012-0001232)참고문헌
1. Kim, J. Y., Kwon, Y. C. and Hong, Y. S.,
"Automated Alignment of Rotating Magnetic Field forInducing a Continuous Spiral Motion on a
한국정밀공학회 2013년도 춘계학술대회논문집
Capsule Endoscope with a Twistable Thread Mechanism", International Journal of Precision Engineering and Manufacturing, 13, 371-377, 2012.
2. Park, H. J., Kim, D. W. and Kim, B. K., "A Robotic Colonoscope with Long Stroke and Reliable Leg Clamping", International Journal of Precision Engineering and Manufacturing, 13, 1461-1466, 2012.
3. Kim, Y. T. and Kim, D. E., "Novel Propelling Mechanisms Based on Frictional Interaction for Endoscope Robot", Tribology Transactions, 53, 203-211, 2010.
4. Lee, S. H., Kim, Y. T., Yang, S. W., Yoon, E. S., Kim, D. E. and Suh, K. Y., "An Optimal Micropatterned End-Effecter for Enhancing Frictional Force on Large Intestinal Surface", ACS Applied Materials & Interfaces, 2, 1308-1316, 2010.
5. Kim, Y. T. and Kim, D. E., "Biotribological inves-tigation of a multi-tube foot for traction generation in a medical microrobot", Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, 223, 677-685, 2009.