저작자표시-비영리-변경금지 2.0 대한민국 이용자는 아래의 조건을 따르는 경우에 한하여 자유롭게 l 이 저작물을 복제, 배포, 전송, 전시, 공연 및 방송할 수 있습니다. 다음과 같은 조건을 따라야 합니다: l 귀하는, 이 저작물의 재이용이나 배포의 경우, 이 저작물에 적용된 이용허락조건 을 명확하게 나타내어야 합니다. l 저작권자로부터 별도의 허가를 받으면 이러한 조건들은 적용되지 않습니다. 저작권법에 따른 이용자의 권리는 위의 내용에 의하여 영향을 받지 않습니다. 이것은 이용허락규약(Legal Code)을 이해하기 쉽게 요약한 것입니다. Disclaimer 저작자표시. 귀하는 원저작자를 표시하여야 합니다. 비영리. 귀하는 이 저작물을 영리 목적으로 이용할 수 없습니다. 변경금지. 귀하는 이 저작물을 개작, 변형 또는 가공할 수 없습니다.
碩士學位論文
모발-매니퓰레이터의 실시간 다중
장애물 회피에 관한 연구
濟州大學校 大學院
메 카 트 로 닉 스 공 학 과
梁 亨 贊
2009 年 7月
碩 士 學 位 論 文
모발-매니퓰레이터의 실시간 다중
장애물 회피에 관한 연구
濟 州 大 學 校 大 學 院
메 카 트 로 닉 스 공 학 과
梁
亨
贊
2009年
7月
모발-매니퓰레이터의 실시간 다중
장애물 회피에 관한 연구
지 도 교 수
최 경 현
양
형
찬
이 論 文 을 工 學 碩 士 學 位 論 文 으 로 提 出 함
2009年
7月
梁亨贊의 工學 碩士學位 論文을 認准함
審 査 委 員 長
㊞
委
員
㊞
委
員
㊞
濟 州 大 學 校 大 學 院
A Study on the Real-time Multiplex
obstacle avoidance of
Mobile-Manipulator
Hyoung-Chan Yang
(
Super
vi
sedbypr
of
essorKyung-HyunChoi
)
A t
hesi
ssubmi
t
t
edi
npar
t
i
alf
ul
f
i
l
l
mentoft
her
equi
r
ement
f
ort
hedegr
eeofMast
erofEngi
neer
i
ng
Depar
t
mentofMechat
r
oni
csEngi
neer
i
ng
GRADUATE SCHOOL
CHEJ
U NATI
ONAL UNI
VERSI
TY
목
차
Li
s
tofTabl
e
s·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·ⅲ
Li
s
tofFi
gur
e
s·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·ⅳ
SUMMARY·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·vi
I
.서
론 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·1
I
I
.모바일 메니퓰레이터의 기구학 해석 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
1
.모바일-메니퓰레이터 로봇 구조 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
1
.
1하드웨어 구성 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
2
.모바일 로봇의 기구학 해석 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·5
2
.
1순 기구학 해석 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·5
3
.매니퓰레이터의 기구학 해석 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·8
3
.
1순기구학 해석 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·8
3
.
2역 기구학 해석 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·1
1
3
.
2
.
1어깨부터 손목까지 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·1
1
3
.
2
.
2손목부터 e
nd-e
f
f
e
c
t
or
까지 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·1
5
3
.
3자코비안 행렬 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·1
7
3
.
4모바일-매니퓰레이터 로봇의 기구학 해석 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·1
9
Ⅲ.충돌회피 알고리즘 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
1
1
.El
a
s
t
i
cSt
r
i
p ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
3
1
.
1내부 힘(
I
nt
e
r
nalFor
c
e
) ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
3
1
.
2외부 힘(
Ext
e
r
na
lFor
c
e
)·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
5
2
.
1외부 힘 변형(
Ext
e
r
na
lFor
c
eModi
f
i
c
a
t
i
o
n) ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
9
3
.궤적의 변형 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
0
4
.실시간 충돌 회피 컴퍼넌트 및 Ke
r
ne
l모듈 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
2
4
.
1실시간 충돌 회피 컴포넌트 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
2
4
.
2e
l
as
t
i
c
_
s
t
r
i
p_
f
unc컴포넌트 함수 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
4
4
.
3obs
t
a
c
l
e
_
c
he
c
k컴포넌트 함수 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
3
5
4
.
4Ge
t
Po
s
i
t
i
on컴포넌트 함수 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
6
5
.실시간 충돌회피 모듈 함수 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
7
5
.
1장애물 확인 및 좌표 버퍼 생성 알고리즘 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
7
5
.
1
.
1좌표 버퍼 생성 알고리즘 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
7
5
.
1
.
2충돌 에러 보상 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
8
5
.
1
.
3Sor
t
Pos
i
t
i
on컴포넌트 함수 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
9
5
.
1
.
4I
s
Sor
t컴포넌트 함수 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
4
1
5
.
2메모리 좌표 재설정 및 재배열 알고리즘 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
1
Ⅳ.시뮬레이션 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
3
1
.알고리즘 시뮬레이션 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
3
2
.모바일 로봇의 충돌회피 실험 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
7
Ⅴ.결론 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·5
0
Ⅵ.참고문헌 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·5
1
Li
stofTabl
es
Ta
bl
e1Se
ns
or
ss
pe
c
i
f
i
c
a
t
i
on·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
Ta
bl
e2Li
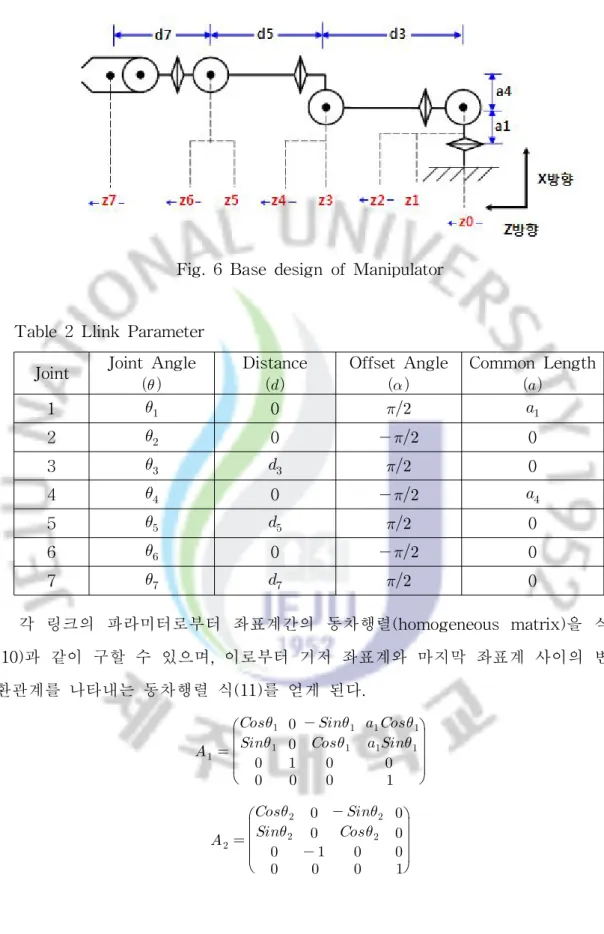
nkPa
r
ame
t
e
r·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·9
Li
stofFi
gur
es
Fi
g.1Mobi
l
eRo
bot·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
Fi
g.2RobotConf
i
gur
at
i
on·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
Fi
g.3Sys
t
e
m c
onf
i
gur
a
t
i
onoft
hemobi
l
er
obot·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
Fi
g.4Mobi
l
er
obotmo
de
l
i
ng a
ndc
oor
di
nat
es
ys
t
e
m ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·5
Fi
g.5Mani
pul
at
or3
D Mode
l
i
ng·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·8
Fi
g.6Bas
ede
s
i
gnofMa
ni
pul
a
t
or·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·8
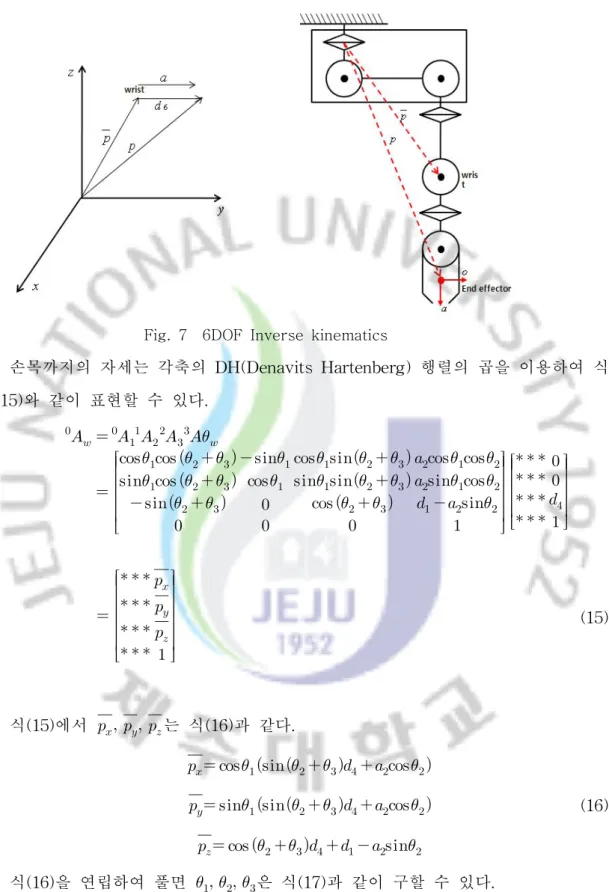
Fi
g.76
DOF I
nve
r
s
eki
ne
mat
i
c
s·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·1
2
Fi
g.87
DOF I
nve
r
s
eki
ne
mat
i
c
s·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·1
4
Fi
g.9
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·1
5
Fi
g.1
0
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·1
6
Fi
g.1
1Co
or
di
na
t
eofMobi
l
eMa
ni
pul
a
t
or·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·1
9
Fi
g.1
2I
ni
t
i
alt
r
aj
e
c
t
or
yandwaypds
e
s·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
2
Fi
g.1
3Tr
ans
f
or
ma
t
i
o
npr
o
c
e
dur
eoft
het
r
a
j
e
c
t
or
y·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
3
Fi
g.1
4Di
r
e
c
t
i
o
no
fEl
a
s
t
i
cFor
c
e·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
4
Fi
g.1
5A s
af
e
t
ya
r
e
aofc
ont
r
olpoi
nt·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
5
Fi
g.1
6Co
mput
et
hepos
i
t
i
onofobs
t
ac
l
e·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
6
Fi
g.1
7Co
l
l
i
s
i
ona
voi
danc
eAl
gor
i
t
hm ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
8
Fi
g.1
8(
a
;
b)El
as
t
i
cs
t
r
i
psbas
e
do
nt
hene
a
r
e
s
tobs
t
a
c
l
e·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·2
9
Fi
g.1
9
r
e
pr
e
s
e
nt
st
hec
o
nt
r
olpo
i
nt
sont
hebody·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
0
Fi
g.2
0Re
alt
i
meobs
t
ac
l
eavo
i
danc
ec
ompone
nt·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
2
Fi
g.2
1e
l
a
s
t
i
c
_
s
t
r
i
p_
f
uncf
unc
t
i
on·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
4
Fi
g.2
2obs
t
a
c
l
e
_
c
he
c
kf
unc
t
i
o
n·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
6
Fi
g.2
3Ge
t
Pos
i
t
i
onf
unc
t
i
on·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
7
Fi
g.2
4장애물 확인 및 좌표 버퍼 생성 알고리즘
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
7
Fi
g.2
5Vi
apoi
nt생성 및 필터링 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·3
9
Fi
g.2
6Sor
t
Po
s
i
t
i
onf
unc
t
i
o
n·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
0
Fi
g.2
7I
s
So
r
tf
unc
t
i
on·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
1
Fi
g.2
8메모리 좌표 재설정 및 재배열 알고리즘 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
2
Fi
g.2
9로봇의 불규칙한 장애물 회피 시뮬레이션 결과 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
3
Fi
g.3
03
D mode
l
i
ng·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
4
Fi
g.3
13
D 시뮬레이션 결과 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
5
Fi
g.3
2매니퓰레이터 시뮬레이션 결과 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
6
Fi
g.3
3로봇의 장애물 회피 실험 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
8
Fi
g.3
4로봇의 이동 중인 장애물 회피 실험 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·4
9
Summar
y
This paper proposes the Elastic Force application on the obstacle avoidance of Silvermate Robots. The method deals with the problem associated with a Silvermate robot driving to a goal configuration as avoiding obstacles.The initialtrajectory of a robot is determined by a motionplanner,andthetrajectorymodificationisaccomplishedby adjusting the controlpoints.The controlpoints are obtained based on the elastic force approach.Consequently the trajectory of a robot is incrementally modified to maintain a smooth and adaptive trajectory in an environment with obstacles.Thesuggested algorithm drivestherobotto obstacleavoid in real-time.Finally,Thesimulation studiesarecarriedouttoillustratethe effectivenessoftheproposedapproach.
Ⅰ.서
론
현대 사회에 인간은 시간과 공간의 제약에서 자유로워지고 삶의 질이 향상을 위하여 산업용 로봇과 가정용 로봇 등 많은 분야에서 로봇을 사용하고 있다. 점점 로봇기술의 중요성이 날로 증대되고 있으며,로봇은 인간이 단순 작업과 정밀작업 등을 대체하고,인간이 할 수 없는 많은 분야에서 인간을 노동력을 대신하여 산업분야와 연구 분야,일상생활에서 효율적인 발전을 이루고 있다. 인간의 노동력을 대처하기 시작한 산업용 로봇은 인간이 적응하기 어려운 불안정한 환경에서 오차율이 적은 정밀 작업을 할 수 있게 하고,새로운 환경 에 대한 탐사와 같이 불확실한 환경에도 로봇이 투입되어 보다 안전하고 복잡 한 작업의 수행을 하고 있다.또한,세계적의 인구가 고령화 추세로 접어들면 서 이를 보조할 가정용 및 실버용 로봇에 대한 관심도와 중요성이 나날이 증 가하고 있다.일상생활에서 사용되는 세탁기와 청소기 같은 인간의 노동력이 필요한 수동적인 보조도구와 다르게 가정용 로봇과 실버용 로봇은 이러한 인 간이 해야 할 부분까지 능동적으로 일을 처리하기 때문에 삶의 질적 향상을 위하여 필요한 부분이라 할 수 있다. 이렇게 우리 생활에서 점점 빠질 수 없게 되는 로봇이기 때문에 로봇에게 주어진 다양한 미션에 대한 성공적인 수행을 위하여 로봇은 현재의 상황을 실 시간으로 파악하고,이를 능동적으로 대체할 수 있도록 해야 한다.따라서 이 를 자동으로 처리할 수 있는 로봇의 AI알고리즘과 작업 스케줄러의 향상을 위한 기술개발은 필수일 수밖에 없다. 또한,로봇이 능동적으로 미션을 수행하기 위해서 이동할 때,이동 경로 위 에 장애물이 있을 경우 안전하게 장애물을 회피할 수 있는 최적 경로 재탐색 과,경로의 수정하여 재조정할 수 있는 실시간 이동 기술은 로봇 분야의 가장 기본이면서도 중요한 축이라 할 수 있다. 본 연구에서는 위와 같은 실시간 이동 기술 중 장애물 발견되면 신속하고한다.
Ⅱ.모바일 매니퓰레이터의 기구학 해석
1. 모바일-매니퓰레이터 로봇 구조 1.1 하드웨어 구성 본 논문에서 사용한 자율 이동로봇은 Fig.1과 Fig.2에서 보는 바와 같이 21C 프론티어 연구 개발사업의 일환인 인간기능 생활지원 지능로봇 사업단에서 노인 복지용 로봇 개발을 위한 목적으로 설계,제작되었다.이동로봇의 하드웨어는 (주)다사테크에서 Fig.1과 같이 이륜구동 방식으로 제작한 주행 베이스와 Fig.2 와 같이 7축의 여유자유도를 갖는 매니퓰레이터가 모바일 양 쪽에 장착되어 있 다. 이 매니퓰레이터는 3개의 링크가 연결되어 있으며 팔목에서 손목사이에 옵셋 (offset)이 있어 일반적인 매니퓰레이터와 기구적 특성이 다르다.각 조인트 사 이에는 위치 센서,관절 토크 센서 및 F/T 센서 등이 내장되어 있으며 파지와 조작 작업이 가능하다.로봇의 시스템 구성 및 각 부의 인터페이스는 Fig.3과 같이 표현되고 로봇에 탑재된 센서의 사양은 Table1과 같이 정리하였다.[1][4]Fig.1MobileRobot
Fig.3System configurationofthemobilerobot Item Specification LaserRange Finder (LMS200-30106) [SICK]
PowerSource:DC 24V
Front OperationType:pulsedIR
ScanRange:10m/180° AngularResolution:1/0.5/0.25
ResponseTime:13/26/53ms InterfaceMethod:RS232/RS422
IR Scanner (PBS-03JN) [HOKUTO]
PowerSource:DC 24V
Front/rear OperationType:pulsedIR
ScanRange:0.2~3m (distance) AngularResolution:1/0.5/0.25
ResponseTime:180ms InterfaceMethod:RS232
Gyro (TA7319N3) [TAMAKAWA]
PowerSource:DC 5V
Bottom OperationType:Opticalfiber
ScanRange:00s Error:0.1
InterfaceMethod:Analog(DAQ board) UltraSonar Sensor (PS40S) [Nicera] Frequency:40KHz 12/360ea/° Distance:0.2~1m Resolution:mm
InterfaceMethod:RS232C(molues)
Bumper MagneticLimitSwitch 3 Table.1Sensorsspecification
2. 모바일 로봇의 기구학 해석
2.1 순 기구학 해석
모바일 로봇의 입력변수로부터 직각 좌표계의 위치와 그 시간 미분 값을 구하 기 위하여 순 기구학을 구한다.Fig.4에서는 본 논문에서 사용된 이륜구동 모바 일 로봇의 기구학을 나타내었다.
FIg.4Mobilerobotmodelingandcoordinatesystem 여기서,
:Cartesian좌표계에서의 worldframe
:Cartesian좌표계에서의 모바일로봇 중심점의 좌표 :모바일로봇의 왼쪽 바퀴와 오른쪽 바퀴의 각속도 :모바일로봇 중심에서 바퀴 축까지의 거리 :모바일로봇 중심에서의 각속도 :모바일로봇의 왼쪽 및 오른쪽 바퀴의 선형속도 :모바일로봇 중심에서의 선형속도 :모바일로봇 중심에서의 각속도
모바일 로봇의 기구학을 해석하기 위하여 Fig.4와 같이 절대 좌표계를 설정하 고,2차원 평면으로 구성된 전역좌표계에서 속도 기구학을 통해 모바일 로봇의 상태를 위치와 방향을 갖는 벡터 로 나타낼 수 있다.일반적으로
모바일 로봇은 Non-holonomic 시스템으로 “순수 구름 조건(Pure rolling condition)”과 “미끌림 없음 조건(Nonslippingcondition)”이 필요하다.순수 구름 조건은 바퀴와 접촉면 사이의 순간적 이동 방향으로의 상대속도가 0이라는 조건 이므로 각 바퀴에 대하여 식 (1),(2)와 같이 나타낸다. (1) (2) 또한,미끌림 없음 조건에 대하여 식 (3)과 같이 나타낸다. (3) 식 (1)~식(3)에 의해 Cartesian space의 모바일 로봇의 속도와 각속도는 식 (4)와 같이 결정된다.