Drone Image Quality Analysis According to Flight Plan
Park, Joon Kyu
1)· Lee, Keun Wang
2)Abstract
Drone related research has been increasing recently due to the development and distribution of commercial unmanned aerial vehicles. However, most of the previous studies focused on the accuracy and utility of drone surveying. For drones, the resolution of the result is determined according to the flight altitude, but since 70% of Korea is mountainous, it is necessary to analyze the quality of the drone image according to the flight plan. In this study, the quality of drone photogrammetry results according to flight plans was analyzed. The flight plan was established by fixed altitude and considering the height of the terrain. Images were acquired for both cases and data was processed to generate ortho images. As a result of evaluating the accuracy of the generated ortho image, the accuracy was found to be -0.07 ~ 0.09m. The accuracy of Case I and Case II did not show a significant difference, but for RMSE, Case I showed a good value. These results indicate that the drone flight plan affects the quality of the results. Also, when flying at a fixed altitude, II showed a lower value than the originally set overlap according to the altitude of the object. In future surveys using drones, flight planning taking into account the height of the object will contribute to the improvement of the quality of the results.
Keywords : Accuracy Analysis, Drone, Photogrammetry, Image Quality
1. Introduction
The recent progress toward the 4th industrial revolution has been very steep. The 4th Industrial Revolution refers to a change in the industrial environment in which automation and connectivity are maximized with artificial intelligence. After being known through several books from 2015, it was also mentioned at the World Economic Forum held in Davos, Switzerland on January 20, 2016. The keywords suggested by scholars are slightly different, but mostly machine learning and artificial intelligence(Lee and Lee, 2017; Shin et al., 2016). Accordingly, the positive evaluation of 'a revolution
that closely ties technology and our relationship by promoting the growth of civilization to the extent that it may be able to escape from the bondage of labor that humans thought of as original sin for the first time in history' and 'explosive unemployment rate increase. There is a negative evaluation of 'dangerous progress that can cause extreme polarization and even the destruction of conventional civilization', but apart from the evaluation that diverges into extremes, it is already a situation that must be accepted as an irreversible trend for the survival of companies(Park and Um, 2018; Do
et al., 2015; Kim et al., 2018). Drone maximizes stability
and versatility with Autopilot and Navigation & Guidance
Received 2021. 04. 09, Revised 2021. 04. 15, Accepted 2021. 04. 26
1) Member, Department of Civil Engineering, Seoil University, Republic of Korea (E-mail:[email protected])
2) Member, Corresponding author, Department of the Multimedia Science, Chungwoon University, Republic of Korea (E-mail: [email protected]) https://doi.org/10.7848/ksgpc.2021.39.2.81 Original article
technology on existing RC devices that have been treated as simple toys, and is equipped with various sensors starting with the GNSS (Global Navigation Satellite System). As a generic term for devices that have dramatically improved the quality and quantity of information that can be collected, it is a representative field of the 4th industry in which various artificial intelligences and high-level algorithms are operated in their manufacture, operation, and processing of collected information(Lee and Sung, 2018, Kim and Yoon 2018). In the 'Innovative Growth Engine Implementation Plan' announced in December 2017, the Korean government announced a plan to invest 9,23 trillion won (450 billion won in the drone sector) by 2022, including drones in 13 core 4th industries. The commercial use of drones is being studied to make visible success cases centering on transportation, forestry, firefighting/relief activities, and surveying using unique universal accessibility(Lee, 2018; Kim et al., 2018a). Drone surveying is a technique that utilizes excellent accessibility for surveying, and it can supplement the problems of existing aerial photogrammetry (number of days available for work, economy, and convenience), and the government, recognizing its effectiveness, enacted work regulations in February 2018. Thus, an institutional procedure was established for drone surveys to be recognized as public survey results(Lee et al., 2018a; Kim et al., 2018b; Lee et al., 2018b).
Drone related research has been increasing recently due to the development and distribution of commercial unmanned aerial vehicles. Starting from the development of the system in the early 2000s, research on the calculation of output and accuracy of verification for application to various fields has been conducted(Yun et al., 2018; Yun and Sung, 2018). Most of the studies related to surveying drones have been conducted on the construction and accuracy of geospatial information. Using drone photogrammetry, data was acquired from various places such as construction sites, forest areas, and disaster areas, and accuracy and utility were analyzed(Lee et al., 2020). Aerial photographic surveys of coastal marine areas were conducted using drones, and a study was conducted to generate digital elevation models and orthogonal images of tidal flats(Han, 2017). A study was also conducted to construct spatial information of large-scale open-pit mines using drone photogrammetry, and to evaluate
the accuracy and utility of outcomes. As such, existing studies related to drone surveying have focused on the accuracy and utility of the results. In drone photogrammetry, the resolution of the result is determined according to the flight altitude of the drone. Because 70% of Korea is made up of mountainous areas, the resolution of the result of drone photogrammetry is not constant when flying at a constant flight altitude. Fig. 1 shows the resolution according to flight altitude.
Fig. 1. Resolution of Drone Photogrammetry
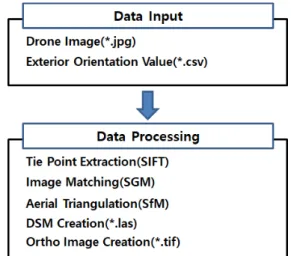
Therefore, it is necessary to analyze the quality of the drone photogrammetry results according to the flight plan. In this study, the quality according to the flight plan was analyzed to suggest a method to improve the quality of the result. Fig. 2 shows study flow.
2. Composition of Drone Photogrammetry
System and Analysis Theory
2.1 Composition of Drone Photogrammetry
System
Drones are divided into fixed wing and rotary wing according to the shape of the wing. Fixed wing refers to an aircraft with fixed wings like an aircraft, and has the advantage of being able to fly at a high flight speed and long time and at high altitudes, but it is difficult to shoot at a certain altitude, and it is difficult to shoot in a variety of ways compared to a rotary wing, and it is relatively expensive. A rotorcraft refers to a vehicle that flies with the lift generated by the propeller spinning, like a helicopter, and is divided into quadcopter, hexacopter, octacopter, etc. according to the number of propellers(Kim and Jung, 2017; Yoo et al., 2016). Fig. 3 shows fixed wing and rotary wing drone.
Fig. 3. Fixed Wing and Rotary Wing Drone
Although the flight speed is slow, it is inexpensive compared to a fixed wing, and it has the advantage of being able to shoot in a variety of vertical and horizontal shooting due to good controllability due to hovering and mounting of various sensors. The drone is equipped with an observation sensor(digital camera) and a GPS/INS sensor, and it is possible to acquire high-resolution images by taking aerial photographs by flying with manual and automatic control at low altitude(Lee et al., 2016; Kim et al., 2016; Choi and Lee, 2016). Drone photogrammetry proceeds in the order of flight plan establishment, ground control point survey, data acquisition, and geospatial information production, and
geospatial information using drone data is produced using analysis software. The production of geospatial information using images taken by drones is produced in the order of drone image and expression data input, ground reference point input, image matching, point cloud extraction, ortho image production. Fig. 4 shows drone data processing.
Fig. 4. Drone Data Processing
2.2 SIFT (Scale-Invariant Feature Transform)
SIFT is an algorithm that extracts features that are invariant to the size and rotation of an image. The basic principle is that you can find the corresponding part of the two images by extracting the SIFT features from two different images and then matching the features that are most similar to each other. In other words, as shown in Fig. 5, it is an algorithm that can find and match the same object in an image with matching contents although the size and rotation are different(Park and Lee, 2016). The SIFT operator can be divided into two levels. In the first step, a DoG (Difference-of-Gaussian), one of the methods of finding the edges of objects in an image among image processing methods, is performed in a scale space, and feature points that can be candidates are extracted from the maximum or minimum points. The second step is a method of generating a descriptor consisting of the scent components through stability/conformity testing and correction. The SIFT operator is robust to changes in rotation and size and is the most frequently used feature point extraction operator in the field of computer vision(Park and Lee, 2016). DoGrefers to a difference image between Gaussian filtered images having different standard deviations, and is performed after creating a pyramid image.
(1)
Where is Gaussian function with standard deviation , The constant refers to the standard deviation interval of the Gaussian function, and generally the value of
is used. is DoG image(Choi et al., 2015).
2.3 SfM (Structure from Motion)
SfM is a representative field of computer vision research that estimates camera motion and 3D structure information from two or more three-dimensional images. SfM is an algorithm that backtracks the camera position and direction of a captured image using motion information of a two-dimensional image, and then structures the relationship between the images and the cameras. Using SFM, it is possible to obtain a unique feature point of each captured image, and match and calculate the feature points and relationships for each shooting scene to obtain the camera position. SfM is an algorithm that backtracks the camera position and direction of a captured image using motion information of a two-dimensional image, and then structures the relationship between the images and the cameras. Using SFM, it is possible to obtain a unique feature point of each captured image, and match and calculate the feature points and relationships for each shooting scene to obtain the camera position. SfM technology has the advantage that digital cameras can be performed without the help of additional sensors, and geometric information such as camera movement (position) and three-dimensional structure (or position) can be extracted from arbitrary images taken from various cameras. Multi-view refers to three or more consecutive images that can be obtained using general cameras such as digital cameras, mobile phone cameras, and camcorders. SfM using such multi-view geometry is capable of processing images taken without special conditions in advance, and has the feature of 360° 3D restoration using the advantage of a wide viewing angle obtained from multiple images. The step of estimating the relative posture and position of the two cameras based on
the matched corresponding points is the most important part of SfM and is a basic step to estimate the three-dimensional position of an object. First, the model equation projected as an image from a 3D object in one camera is based on a pinhole camera(Lee et al., 2015).
(2)
Where
is the coordinates of the image, is thecoordinates in 3D space, and is the rotation matrix. In addition, is a moving matrix between images, and is
a matrix containing the internal exterior elements of the camera. If you know the rotation information of the camera, the internal expression element of the camera, and the coordinates in 3D space, you can obtain the corresponding image coordinates. Conversely, if you know the image coordinates, you can obtain the corresponding coordinates in 3D space(Choi and Kim, 2014).
One of the most basic processes in digital photogrammetry is finding and observing conjugate points in two or more images, which is automatically resolved through image matching, and epipolar geometry is used to determine conjugated elements. The basic principle of epipolar geometry is that the point in the right picture corresponding to an arbitrary point in the left picture exists on the same conjugate line of the two images by the principle of coplanarity.
In order to acquire 3D stereoscopic vision in digital photogrammetry, two 3D images in which the longitudinal parallax has been eliminated are required in which the scan lines of the two 3D images satisfy the epipolar geometry. As such, the longitudinal parallax is eliminated and the two images are scanned. An image in which a line satisfies the epipolar geometry is called an epipolar image. Epipolar video enables stereoscopic vision on a monitor and minimizes the search area by limiting the location of the conjugation point to the same y-axis in terms of automation of digital photogrammetry, thus improving the accuracy and efficiency of image registration. After completing the expression or the absolute expression, the epipolar geometry can be constructed by aligning the photographing direction and the conjugated point of the three-dimensional photograph using external expression elements(Park and Jung, 2014).
2.4 SGM (Semi-Global Matching)
SGM is a technology that performs stereo image matching in consideration of the parallax combining local and global matching, and requires a pre-processing step. In the preprocessing step of SGM, an epipolar image is generated by using an epipolar geometry to remove longitudinal parallax (y disparity) between left and right images. When image registration is performed using SGM technology, a specific position of the left image is matched by pixel unit along the path of the epipolar line(Shin, 2018; Kim and Kwon, 2020). The displacement range is the amount of movement from the left image to the right image and can be expressed as the following equation.
(3)
Where is the amount of displacement of the object in the image, and , are the distance of the object from the left and right images, respectively. Since the displacement amount of the object in the image is calculated differently depending on the height, the maximum displacement amount or the appropriate displacement amount is set as a range.
The minimum cost for each direction is calculated for each direction based on the initial cost calculation result of all pixels. At this time, the direction can be divided into 4 directions, 8 directions, and 16 directions. If the pixel position is p, the transition is d, and the direction is r, the formula for calculating the minimum cost is as follows(Cho and Kim 2020; Roh, 2020; Yang, 2020).
min (4) min min
Where is the right image, is the current pixel position,
is the direction, and is the transition. , are the critical
values, is the threshold value added when there is a small
variation difference, and is the threshold value added when
there is a large variation difference. k is the one that has the least cost among variations(Lee and Choi, 2019; Kim et al., 2019). Fig. 8 shows concept of SGM.
3. Data Acquisition
In this study, in order to evaluate the quality of drone images according to the flight plan, an area including mountains was selected as the study area. The study site was selected around Jeongbalsan Mountain in Gyeonggi-do. Jeongbalsan is a low mountain and has an altitude of about 90m. It was selected as the study area in consideration of the safety of drone flight. Fig. 5 shows study area.
Fig. 5. Study Area
Fixed-wing UX11 was used for data acquisition. The UX11 can fly at a certain altitude in the flight plan. And if there is information about the terrain, it can fly while changing the altitude according to the terrain. Fig. 10 shows UX11(www. trimble.com).
Fig. 6. UX11
In this study, the flight plan for data acquisition of the study site was established at a fixed altitude and an altitude considering topography. The flight plan considering the topography of the study site used SRTM (Shuttle Radar Topography Mission) data. SRTM is a project that provides
DEM (Digital Elevation Model) around the world. It was promoted in cooperation with the NGA (National Geospatial-Intelligence Agency) and the NASA(National Aeronautics and Space Administration). Fig. 7 shows SRTM example(Nwokeabia, C. N. et al., 2019). Figs. 8 and 9 show the flight plan.
Fig. 7. STRM Medel Example
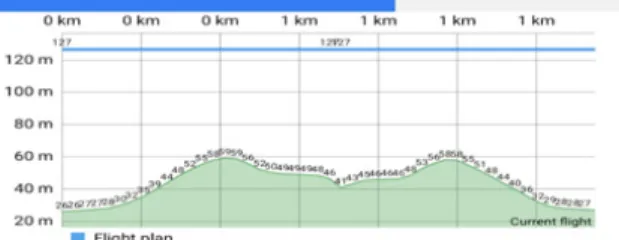
Fig. 8. Flight Plan Considering Topography(CASE I)
Fig. 9. Flight Plan Considering Topography(CASE II)
As shown in Figs. 12 and 13, the flight plan is different depending on the terrain considerations. In the case of a fixed altitude (Figure 12), you will fly at the same altitude
regardless of the terrain. However, when the terrain is considered (Figure 11), the flight altitude is changed according to the altitude. The difference in altitude between the two flight plans is about 30m, which will result in a different quality of the captured image. GCP (Ground Control Point) and check points were surveyed for analysis of the acquired data. Surveying was performed using the VRS (Virtual Reference Station) method using GNSS. Road facilities(boundary stone, menhole) that can be distinguished from the ground were measured. Fig. 10 shows GCP and check point survey.
Fig. 10. GCP and Check Point Survey
4. Data Processing
UAS Master Software was used to process UAV data. The data processing sequence is shown in Fig. 11. Data processing was performed in the order of image and EO values, tie point extraction after GCP input, orientation, DSM generation, and ortho image generation. Geometric errors in the raw images from an UAV are significant as a result of the dynamic platform from which they are captured and the imprecision in the Drone’s position and orientation sensors. To correct for errors in the positions and orientations of the aerial images, we used photogrammetric methods to adjust the photo stations. This is done in data processing module first as an adjustment with tie points. This module automatically finds tie points in all available stations based on state of the art computer vision algorithms. Fig. 12 show drone images and Fig. 13 shows result of tie point extraction.
Fig. 11. Data Processing Flow
Fig. 12. Drone Images
Fig. 13. Data Processing(tie point extraction)
Fig. 14. DSM
The software adjusts the stations simultaneously for a best fit. Automatically matched photo tie points are distributed densely over the complete project, even in challenging low-texture terrain. After the tie point is extracted, DSM is created and ortho image is created. Fig. 14 shows DSM.
5. Image Quality Analysis
In this study, image quality according to flight altitude was analyzed. The data processing results compared the resolution and redundancy of the same region for case I and case II. Figs. 15 and 16 show the comparison of case I and case II treatment results.
(a) Case I (b) Case II Fig. 15. Comparison of Image Quality - Low Ground
Elevation Area
(a) Case I (b) Case II Fig. 16. Comparison of Image Quality - High Ground
Elevation Area
As shown in Figs. 15 and 16, the resolution of case I and case II images was different. In case I, the flight altitude was changed in consideration of the terrain, resulting in the same resolution in low and high altitude areas. However, case II
flew at a constant altitude, resulting in different resolutions in lower and higher areas. In high areas, the distance between drones and targets is short, indicating high resolution, and in low areas, low resolution was shown because the distance between drones and targets is distant. Fig. 17 and Table 1 shows image resolution according to distance from ground.
(a) Case I (b) Case II Fig. 17. Image Resolution According to Distance from
Ground
Table 1. Image Resolution
Case I Case II
Distance to
Ground(m) Resolution(m) Distance to Ground(m) Resolution(m)
100 0.020 100 0.020
100 0.020 80 0.014
100 0.020 60 0.010
Fig. 18. Location of Check Points
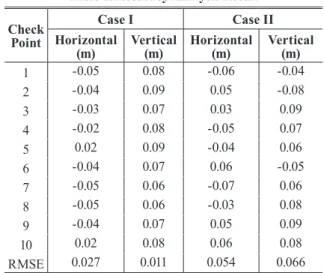
In addition, accuracy evaluation was performed for two cases. The accuracy of case I and case II was evaluated for 10 test points. Ten points were selected considering the altitude.
Fig. 18 shows the location of the check points and Table 2 shows accuracy analysis results.
Table 2. Accuracy Analysis Result Check
Point
Case I Case II
Horizontal
(m) Vertical(m) Horizontal(m) Vertical(m)
1 -0.05 0.08 -0.06 -0.04 2 -0.04 0.09 0.05 -0.08 3 -0.03 0.07 0.03 0.09 4 -0.02 0.08 -0.05 0.07 5 0.02 0.09 -0.04 0.06 6 -0.04 0.07 0.06 -0.05 7 -0.05 0.06 -0.07 0.06 8 -0.05 0.06 -0.03 0.08 9 -0.04 0.07 0.05 0.09 10 0.02 0.08 0.06 0.08 RMSE 0.027 0.011 0.054 0.066
As a result of the accuracy evaluation, case I was -0.05 to 0.09m, and case II was -0.07 to 0.09m. In the two cases, the maximum and minimum values did not show a trend, but in case II, the RMSE value was relatively high, so the quality of the result could be said to be better in case I. The reason why the RMSE of case II shows a high value is because the resolution of the obtained image is different. In addition, it can be thought that this is because the redundancy set in the flight plan and the actual redundancy are different due to the difference in the height of the terrain. Figure 19 shows the difference of overlap in case II.
(a) overlap 80%(Low Ground Elevation Area) (b) overlap 65%(High Ground Elevation Area) Fig. 19. Difference of Overlap in Case II
As shown in Fig. 19, in case II (fix altitude), it can be seen that the higher the height of the object, the lower the overlap than the original 80%. This difference will increase as the height of the object increases, and in order to obtain high quality accuracy in the flight plan of a drone, it is necessary to establish a flight plan that considers the height of the object. In the case of Korea, since the mountainous area is 70% of the country, it is necessary to consider the flight plan for drone photogrammetry. It is necessary to consider the height of the terrain because the flight plan has a large effect on the result of drone photogrammetry. Table 3 shows the characteristics of the considering topography method and the fixed altitude method.
Table 3. Characteristics of the Considering Topography Method and the Fixed Altitude Method Considering Topography Fixed Altitude - Requires terrain model - Fast flight plan establishment - constant resolution - Inconsistent resolution - constant overlap - Inconsistent overlap - Reduced risk of drone
accidents - Suitable for small terrain changes
6. Conclusions
In this study, the quality of drone survey results according to the flight plan was analyzed. The terrain with an altitude difference of about 80m was selected as the study site, and the drone flight plan was established. The flight plan was established by fixed altitude and considering the height of the terrain. Images were acquired for two cases, and ortho images were generated through data processing. The accuracy of the generated orthogonal image was evaluated, and as a result, the accuracy was found to be -0.07~0.09m. The accuracy of case I and case II did not show a big difference, but for RMSE, case I showed a good value. These results can be seen that the drone flight plan affects the quality of the results. In addition, case II flying at a fixed altitude showed an actual lower value than the originally set overlap according to the altitude of the object. Since most of Korea's land is made up of mountainous areas, it is necessary to establish a flight plan
that considers such topography in drone photogrammetry. In future surveys using drones, a flight plan that considers the height of the object will contribute to the improvement of the quality of the result.
References
Choi, S.K., Cho, S.J., Kang, S.M., Lee, K.T., Lee, W.K., and Jeong, G.S. (2020), Development of Real-Time Vision Aided Navigation Using EO/IR Image Information of Tactical Unmanned Aerial System in GPS Denied Environment, Journal of the Korean society for
aeronautical & space sciences, Vol. 48, No. 6, pp. 401-410.
(in Korean with English abstract)
Choi, K.A. and Lee, I.P. (2016), Accuracy Analysis of Coastal Area Modeling through UAV Photogrammetry, Korean
Journal of Remote Sensing, Vol. 32, No. 6, pp. 657-672.
Choi, Y.W., You, J. ., and Cho, G.S. (2015), Accuracy Analysis of UAV Data Processing Using DPW, Journal of
the Korean Society for Geospatial Information Science,
Vol. 23, No. 4, pp. 3-10. (in Korean with English abstract) Cho, Y.J., Kim, S.R. (2020), A Study on the Necessity of
Weather Information for Low Altitude Aircraft, Journal of
the Korean Society for Aviation and Aeronautics, Vol. 28,
pp. 45-58. (in Korean with English abstract)
Choi, I.H. and Kim, M.G. (2014), Availability Evaluation of UAV for Construction of Geospatial Information about Quantity, Journal of the Korean Cadastre Information
Association, Vol. 16, pp. 149-156. (in Korean with English
abstract)
Do, M.S., Lim, E.T., Chae, J.H., and Kim, S.H. (2018), Accuracy Evaluation and Terrain Model Creation of Urban Space using Unmanned Aerial Vehicle System, The
Journal of the Korea Institute of Intelligent Transportation Systems, Vol. 17, No. 5, pp. 117-127. (in Korean with
English abstract)
Han, S.H. (2017), High-Resolution and High-Definition Image Acquisition Using UAV and High-Precision Aerial Triangulation, Journal of the Korean Society for
Geospatial Information Science, Vol. 25, No. 3, pp.
Kim, Y.D., Park, B.W., and Lee, H.S. (2018b), Accuracy Analysis According to GCP Layout Type and Flying Height in Orthoimage Generation Using Low-cost UAV,
Journal of the Korean Society for Geospatial Information Science, Vol. 26, No. 3, pp. 31-39. (in Korean with English
abstract)
Kim, J.U., Lee, W.H., and Shin, H.S. (2018), A Study on Landscape Management Techniques of ultural Heritage Designated Area Using 3D Mapping Method, Journal of
the Korean Institute of Traditional Landscape Architecture,
Vol. 36, No.1, pp. 97-108. (in Korean with English abstract) Kim, M.C. and Yoon, H.J. (2018), A Study on Utilization
3D Shape Pointcloud without GCPs using UAV Images,
Journal of the Korea Academia-Industrial cooperation Society, Vol. 19, No. 2, pp. 97-104. (in Korean with English
abstract)
Kim, H.K. and Kwon, H.J. (2020), Applications of image analysis techniques for the drone photography in water resources engineering, Journal of Korea Water Resources
Association, Vol. 53, pp. 463-467. (in Korean with English
abstract)
Kim, T.W., Hong, S.H., Choi, H., and Lee, K.H. (2018a), Efficient Extraction of Road Cross Section Using a UAV,
Journal of the Korean Society for Geospatial Information Science, Vol. 26, No. 1, pp. 69-75. (in Korean with English
abstract)
Kim, M.G. and Jung, K.Y. (2017), Application of UAV Photogrammetry for Standardization of Shoreline Survey,
Asia-pacific Journal of Multimedia Services Convergent with Art, Humanities, and Sociology, Vol. 7, No. 5, pp.
953-960. (in Korean with English abstract)
Kim, M.C., Yoon, H.J., Chang, H.J., and Yoo, J.S. (2016), Damage Analysis and Accuracy Assessment for River-side Facilities using UAV Images, Journal of the Korean
Society for Geospatial Information Science, Vol. 24, No. 1,
pp. 81-87. (in Korean with English abstract)
Kim, T.H., Lee, K.R., Lee, W.H., Yeom, J.H., and Han, Y.K. (2019), Coarse to Fine Image Registration of Unmanned Aerial Vehicle Images over Agricultural Area using SURF and Mutual Information Methods, Korean Journal
of Remote Sensing, Vol. 35, pp. 945-957. (in Korean with
English abstract)
Lee, J.B. and Choi, J.M. (2019), A Study on Detection of Ocean Farms in Coastal Area by Using UAV Photogrammetry and Faster-RCNN Algorithm, Journal of Knowledge
Information Technology and Systems, Vol. 14, pp. 145-156.
(in Korean with English abstract)
Lee, J.O., Kim, D.P., and Sung S.M. (2020), Assessment of LODs and Positional Accuracy for 3D Model based on UAV Images, Journal of the Korea Academia-Industrial
cooperation Society, Vol. 21, No. 10, pp. 197-205. (in
Korean with English abstract)
Lee, K.S., Choi, Y.W., and Lee, J.J. (2016), Building of 3D Terrain Modeling and Evaluation of Location Accuracy using UAV in Beach Area, Journal of the Korean Cadastre
Information Association, Vol. 18, No. 2, pp. 207-216. (in
Korean with English abstract)
Lee, J.W. and Sung, S.M. (2018), Assessment of Positioning Accuracy of UAV Photogrammetry based on RTK-GPS,
Journal of the Korea Academia-Industrial cooperation Society, Vol. 19, No. 4, pp. 63-68. (in Korean with English
abstract)
Lee, B.G. (2018), A Study of Three Dimensional DSM Development using Self-Developed Drone, Journal of the
Korean Earth Science Society, Vol. 39, No. 1, pp. 46-52. (in
Korean with English abstract)
Lee, G.S., Choi, Y.W., Jung, K.S., and Cho, G.S. (2015), Analysis of the Spatial Information Accuracy According to Photographing Direction of Fixed Wing UAV, Journal
of the Korean Cadastre Information Association, Vol. 17,
pp. 141-149. (in Korean with English abstract)
Lee, S.U., Mun, D.Y., Seong, J.W., and Kim, J.W. (2018a), Accuracy Analysis According to the Number of GCP Matching, Journal of the Korean Association of
Geographic Information Studies, Vol. 21, No. 3, pp.
127-137. (in Korean with English abstract)
Lee, K.R., Han, Y.K., and Lee, W.H. (2018b), Generation and Comparison of Orthophotos and 3D models of Small-scale Terraced Topography using Vertical and High Oblique Images Taken by UAV, Journal of the Korean Society for
Geospatial Information Science, Vol. 26, No. 3, pp. 23-30.
(in Korean with English abstract)
Lee, K.R. and Lee, W.H. (2017), Comparison of Orthophoto and 3D Modeling using Vertical and High Oblique
Images taken by UAV, Journal of the Korean Society for
Geospatial Information Science, Vol. 25, No. 4, pp. 35-45.
(in Korean with English abstract)
Nwokeabia, C N., Iduma, U., Ibe, S.O., and Bayelsa, O. (2018), Evaluating the Economic Potential of Part of Ife-Ilesha Schist Belt, Western Nigeria, Using Airborne Magnetic and Radiometric Dataset, IOSR Journal of
Applied Geology and Geophysics, Vol. 6, No. 4, pp. 54-75.
Park, J.K. and Um, D.Y. (2018), Utilization Evaluation of Digital Surface Model by UAV for Reconnaissance Survey of Construction Project, Journal of the Korea
Academia-Industrial cooperation Society, Vol. 19, No. 3, pp. 155-160.
(in Korean with English abstract)
Park, Y.J. and Jung, K.Y. (2014), Availability Evaluation for Generation of Geospatial Information using Fixed Wing UAV, Journal of the Korean Society for Geospatial
Information System, Vol. 22, pp. 159-164. (in Korean with
English abstract)
Park, J.H. and Lee, W.H. (2016), Orthophoto and DEM Generation in Small Slope Areas Using Low Specification UAV, Journal of the Korean Society of Surveying,
Geodesy, Photogrammetry and Cartography, Vol. 34, No.
3, pp. 283-290. (in Korean with English abstract)
Park, J.K. and Lee, K.W. (2020), Analysis of Data Characteristics by UAV LiDAR Sensor, Journal of the
Korea Academia-Industrial cooperation Society, Vol. 21,
pp. 1-6. (in Korean with English abstract)
Roh, T.H. (2020), Analysis of Precision of Interpolation of Reservoir bed Through Comparison of Data Acquired by Using UAV and Echo Sounder, Journal of the Korean
Association of Geographic Information Studies, Vol. 23,
pp.85-99. (in Korean with English abstract)
Shin, D.Y., Han, J.H., Jin, Y.J., Park, J.Y., and Jeong, H.H. (2016), Availability Evaluation For Generation Orthoimage Using Photogrammetric UAV System, Korean Journal of
Remote Sensing, Vol. 32, No. 3, pp. 275-285. (in Korean
with English abstract)
Shin, M.S. (2018), A Meta-Analysis of the Effects of Cooperative Learning Program on Elementary School Students Achievement, Journal of Korean Association for
Learner-centered Curriculum and Instruction, Vol. 18, pp.
471-491. (in Korean with English abstract)
Trimble Inc. http://www.trimble.com/ (accessed on 19th August 2020).
Yang, S.H. (2020), Software Design and Verification Method of Flight Data Recorder for Unmanned Aerial Vehicle,
Journal of advanced navigation technology, Vol. 24, pp.
163-172. (in Korean with English abstract)
Yoo, Y.H., Choi, J.W., Choi, S.K., and Jung, S.H. (2016), Quality Evaluation of Orthoimage and DSM Based on Fixed-Wing UAV Corresponding to Overlap and GCPs,
Journal of the Korean Society for Geospatial Information Science, Vol. 24, No. 3, pp. 3-9. (in Korean with English
abstract)
Yun, K.H., Kim, D.I., and Song, Y.S. (2018), Accuracy Assessment on the Stereoscope based Digital Mapping Using Unmanned Aircraft Vehicle Image, Journal of
Cadastre & Land InformatiX, Vol. 48, No. 1, pp. 111-121.
(in Korean with English abstract)
Yun, B.Y. and Sung, S.M. (2018), Location Accuracy of Unmanned Aerial Photogrammetry Results According to Change of Number of Ground Control Points, Journal
of the Korean Association of Geographic Information Studies, Vol. 21, No.2 pp. 24-33. (in Korean with English