ⓒ 2021, The Korean Society of Clothing and Textiles. All rights reserved.
I. 서 론
웨어러블 로봇은 인체에 착용하여 다양한 환경에 서 인간의 활동을 보조해주는 시스템으로 최근 급속
도로 성장하고 있는 추세이며, 관련 연구도 활발히 진행되고 있다(Park & Hong, 2018). 현재 웨어러블 로봇은 착용자에게 근력을 증폭해주는 용도로 가장 많이 개발되고 있으며, 인체 관절을 모방하여 딱딱한 재료를 사용하는 외골격 형태(Exoskeleton robot)가 주 를 이루고 있다(Kang et al., 2019; Lee et al., 2009). 이 는 인체 착용 부위에 따라 팔을 보조해주는 상지형, 다리를 보조해주는 하지형, 팔과 다리를 모두 보조해 주는 전신형으로 분류된다(Yoon, 2018). †Corresponding author E-mail: [email protected] 본 논문은 정부(과학기술정보통신부)의 재원으로 한국 연구재단의 지원을 받아 수행된 연구임(NRF-2019R1A 2C1005598).
생체신호에 기반한 웨어러블 로봇 내
부분 압박 바지 착용 시 효과 검증
박소영
ㆍ
이예진
† 충남대학교 의류학과Verification of Effectiveness of Wearing Compression Pants
in Wearable Robot Based on Bio-signals
Soyoung Park
ㆍ
Yejin Lee
†Dept. of Clothing & Textiles, Chungnam National University
Received October 21, 2020; Revised November 25, 2020; Accepted December 2, 2020
Abstract
In this study, the effect of wearing functional compression pants is verified using a lower-limb wearable robot through a bio-signal analysis and subjective fit evaluation. First, the compression area to be applied to the func-tional compression pants is derived using the quad method for nine men in their 20s. Subsequently, funcfunc-tional compression pants are prepared, and changes in Electroencephalogram (EEG) and Electrocardiogram (ECG) sig-nals when wearing the functional compression and normal regular pants inside a wearable robot are measured. The EEG and ECG signals are measured with eyes closed and open. Results indicate that the Relative alpha (RA) and Relative gamma wave (RG) of the EEG signal differ significantly, resulting in increased stability and redu-ced anxiety and stress when wearing the functional compression pants. Furthermore, the ECG analysis results indicate statistically significant differences in the Low frequency (LF)/High frequency (HF) index, which reflect the overall balance of the autonomic nervous system and can be interpreted as feeling comfortable and balanced when wearing the functional compression pants. Moreover, subjective sense is discovered to be effective in asse-ssing wear fit, ease of movement, skin friction, and wear comfort when wearing the functional compression pants. Key words: Wearable robot, Electroencephalogram (EEG), Electrocardiogram (ECG), Wear comfort, Quad;
웨어러블 로봇, 뇌파, 심전도, 착용감, 쿼드
Journal of the Korean Society of Clothing and Textiles Vol. 45, No. 2 (2021) p.305~316 https://doi.org/10.5850/JKSCT.2021.45.2.305
외골격 형태의 웨어러블 로봇과 관련된 선행연구 를 살펴보면 다음과 같다. Lee and Han(2014)은 외골 격 시스템의 기술 동향 파악을 목적으로 대표적인 연 구사례를 분류하여 소개하고, 핵심 요소 기술별 특징 을 비교하였다. Yoon(2018)은 육군을 대상으로 설문 조사를 통해 허리를 보조해 줄 수 있는 외골격 로봇이 가장 필요함을 확인하였고, Park and Lee(2014)는 근력 보조기구의 핵심 기술인 외골격 메커니즘 설계 시 인간-로봇의 제어 시스템으로 사용자의 착용성과 편 리성을 높일 수 있는 디자인을 구상하였다. Cerasa et al.(2018)은 외골격 로봇 장치로 재활 훈련을 통해 병 변 위치의 영향을 평가하여 뇌졸중 재활의 신경 기초 와 상지 장애의 예후를 판단하였으며, Sandoval-Gon-zalez et al.(2016)은 손의 능동 재활 루틴을 위한 신경 근골격 재활용 외골격 로봇의 설계 해결책을 제시하 였다. 뿐만 아니라, He et al.(2019)은 안정적으로 걸을 수 있는 보행 패턴을 계획하여 보행 보조용 외골격 로봇을 개발하였다. 이와 같이 외골격 로봇 관련 연구는 현황, 필요 제 품, 인간중심적인 디자인 등 다양한 측면에서 연구가 이루어지고 있긴 하나, 아직까지 웨어러블 로봇 착용 시 그 효율성을 증대시켜줄 수 있는 함께 착용하는 의류에 대한 연구는 거의 없는 실정이었다. 이러한 의류 개발은 웨어러블 로봇의 성능 발휘에 도움을 줄 수 있는 새로운 개념의 주요 요건임에도 불구하고, 현 재는 이러한 측면이 고려되지 못하고 있는 것이 현실 이다(Kim et al., 2019). 따라서 웨어러블 로봇 착용 시 목적에 따라 상황에 맞도록 그 안에 입는 기능성 의류 를 개발하는 것은 의미가 있다고 할 수 있다. 특히, 다양한 기능성 의류 중 신체를 압박하는 밀착 의복은 다양한 착용 효과가 증명되면서 활발한 연구 가 이루어지고 있는데, 이를 구현하는 기술로는 탄성 직물이나 패드 적용, 인간공학적 의복 구성설계 등이 있다(Kwon & Kim, 2019). 이 중 탄성 직물을 이용하는 압박 밀착 의복은 착용자의 신체에 적정한 압력을 유 지하여 에너지 손실을 감소시켜 활동 시에 착용자의 운동 성능을 향상시키고, 부상을 방지하며 피로감을 경감시키는 효과가 있다고 보고되었다(MacRae et al., 2011; Mills et al., 2011). 그 외에도 압박 의복은 혈류 증 가 및 근육의 산소화로 피로도를 감소시켜 운동 후 빠 른 회복을 돕고, 운동 역학 측면에서는 근육의 떨림을 줄여주며, 파워를 향상시켜 운동 효과를 증진시킨다고
도 알려져 있다(Lee et al., 2015). 또한, Jeong et al.(2009) 은 20대 남성의 심전도 측정이 최적화되도록 압박 수 준을 찾아 밀착 의복을 설계하고 제작된 시제품의 착 의 평가를 수행하여 효과를 검증하였고, 더 나아가 휴 대용 심전도기를 부착한 직물 전극형 압박 밀착 의복 개발하여 안정적인 데이터 측정이 이루어졌으며, 착 용감도 우수하다고 보고하였다(Jeong et al., 2010). 한편, 현재 개발된 기능성 의류에 대해서는 주관적 감각 평가와 다양한 객관적인 평가법을 활용하여 성 능을 검증하고 있다. 다만, 극한 환경에서는 기능성 의류 종류에 따른 결과가 확실하게 나타나지만, 표 준 환경에서는 생리 반응 차이가 크지 않을 수 있다 (Bang & Kim, 2012). 그러므로 최근 기능성 의류 착 용에 대한 미세한 차이를 감지하기 위해 뇌파(EEG; Electroencephalogram), 심전도(ECG; Electrocardiog-ram) 등의 생리 신호를 활용하고 있는 추세이다(Bang & Kim, 2012; Jeong & Kim, 2009; Lee et al., 2019). 뇌 파는 인간의 생리적인 반응과 심리적인 상태를 반영 할 수 있는 신호이며, 외부 자극을 받으면 즉각적인 변화가 나타나기 때문에 착용 쾌적감의 변화를 즉 각적으로 분석할 수 있는 장점이 있다(Han & Chun, 2019). 심전도는 심장의 전기적 활동이 반영된 신호 로서 스트레스에 가장 민감하게 반응하는 자율신경 활동을 교감신경계와 부교감신경계로 분리하여 평 가할 수 있는 유용한 방법이다(Jeong & Kim, 2009).
이에 본 연구에서는 웨어러블 로봇 내에 착용하는 기능성 부분 압박형 밀착 바지를 개발하여 이의 효 과를 검증해보고자 하였다. 구체적으로 하체 외골격 웨어러블 로봇을 대상으로 기능 증대를 위한 신체 압 박 부위를 도출하고, 이를 기반으로 탄성 직물을 이 용하여 기능성 부분 압박형 밀착 바지를 제작한 후 중추신경계와 자율신경계의 변화를 통해 착용 쾌적 성을 평가하였다. 이는 웨어러블 로봇 내에 착용하는 기능성 의류 개발의 필요성이 중요함을 인식시키는 기초 자료가 될 것으로 기대한다.
II. 연구방법
1. 피험자 선정 및 실험용 부분 압박형 밀착 바 지 제작 피험자는 신체적, 정신적 이상이 없는 건강한 20대남성으로 9명을 선정하였다. 이들은 실험 참가 전에 주관적 설문 및 뇌파와 심전도 측정을 위한 연구절 차를 충분히 숙지하였고, 모든 참가자는 동의서를 확인하였다. 실험 과정은 생명윤리심사위원회(Insti-tutional Review Board; IRB)로부터 승인을 받았다 (201910-SB-182-01). 또한, 실험 전 강도 높은 운동을 삼가도록 하였고, 알코올 섭취와 흡연 등도 제한하 였으며, 규칙적인 수면시간을 유지하도록 하였다. 본 연구에 참여한 피험자 사이즈와 사이즈 코리아에 서 제공하는 20대 평균 남자 사이즈는 <Table 1>과 같았고, 모든 피험자는 사이즈 코리아 평균 사이즈 범위 내에 해당하였다(Korean Agency for Technology and Standards [KATS], 2015).
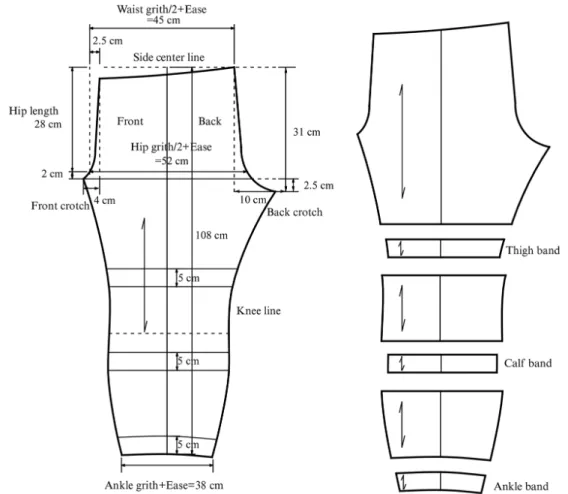
한편, 실험용 부분 압박 밀착 바지 제작 전 걷는 동 작 동안 효과적인 압박 부위 는 웨어러블 로봇 착용 시 인체와 로봇이 접촉하는 허벅지, 종아리, 발목을 변인으로 진행하였다. 압박 부여 및 부위 선정은 탄 성 직물(폴리에스터 93.6%, 폴리우레탄 6.4%)을 사 용하여 밴드 형태로 제작한 후 착용 실험을 통해 이 루어졌다. 압박 밴드 길이(웨일)는 5 cm로 고정하였 으며, 압박 정도에 해당하는 폭(코스)은 피험자마다 각 부위의 사이즈를 측정하여 지거트 방법(Ziegert & Keil, 1988)을 응용하여 축소율을 적용시켜 제작하 였다. 이때, 사용한 탄성 직물의 코스 방향 신축성은 8.3%였고(ASTM International, 2020), 압박 정도는 일 반적인 밀착 의류의 효율적인 압박 부여에 해당하 는 약 7~8% 패턴 축소율을 적용하였다(Jeong, 2006; Kim & Hong, 2012). 피험자마다 신체 부위별 사이즈 가 모두 다르기 때문에 계산식에 의해 산출된 피험 자에 따른 적용된 밴드의 폭은 차이가 있었으며, 이 는 <Table 2>에 나타내었다. 압박 부위 위치로 허벅 지는 무릎뼈가운데점에서 10 cm 올라온 부분의 둘레 를 측정하였고, 종아리는 무릎뼈가운데점에서 5 cm 내려온 부분의 둘레를 측정하였으며, 발목은 안쪽복 사점 부분의 둘레를 측정하였다. 실험용 부분 압박 밀착 바지는 앞서 도출된 효과 적인 압박 부위를 기반으로 제작하였다(Fig. 1). 기본 바지 패턴은 사이즈 코리아에서 제공하는 20대 평균 남성 사이즈를 적용하여 밀착 의복 제작 방법(Cole, 2016)으로 설계하였고, 직물은 압박 부위 도출 실험 시 사용한 것과 동일하였다. 단, 허벅지, 종아리, 발목 부 위는 절개선을 두어 압력 부여를 위한 축소가 될 수
Age (years) High (cm) Waist (cm) Hip (cm) Thigh (cm) Calf (cm) Ankle (cm) Participants Mean (SD) 24.9 (02.7) 174.4 (3.1) 81.9 (4.0) 97.3 (4.1) 53.1 (2.7) 37.9 (1.5) 21.9 (0.6) 20s men average
of KATS (2015) Mean (SD) 20s 173.9 (5.7) 83.6 (9.8) 96.0 (7.1) 53.0 (4.8) 38.1 (3.1) 22.6 (1.5)
Table 1. Physical characteristics of participants and average of KATS
Participants Thigh Calf Ankle
Body size Pattern size Body size Pattern size Body size Pattern size
1 53.5 44.4 39.5 32.8 22.0 18.3 2 46.0 38.3 36.0 30.0 22.5 18.7 3 52.5 43.6 38.0 31.5 21.5 17.8 4 54.5 45.2 41.0 34.0 23.0 19.1 5 53.5 44.4 37.3 31.6 21.1 17.5 6 56.0 46.5 39.2 32.5 22.6 18.8 7 54.0 44.8 37.0 30.7 21.5 17.8 8 54.0 45.6 42.0 34.9 21.5 19.9 9 54.0 44.0 36.5 30.3 21.7 18.0
Table 2. Body circumference and compression band width of thigh, calf, and ankle for each participant
있도록 하였다. 재봉기는 환봉기계를 사용하였고, 스 티치는 504 3-본사 오버에지였으며, SPI는 12였다. 허리 부분은 고무줄로 착 · 탈의가 편하도록 하였다. 2. 실험 방법 부분 압박 밀착 바지 제작 전에 걷는 동작 시 인체 의 어느 부위를 압박하는 것이 가장 효율적인지 알아 보는 기초 실험은 허벅지, 종아리, 발목, 발목과 종아 리, 허벅지와 종아리, 허벅지와 발목, 전체(허벅지+ 종아리+발목), 총 7가지 변인을 사용하였다. 피험자 는 2개씩 쌍으로 각각 좌 · 우에 착용하였고, 걷는 동 작을 반복하면서 ‘동작 시 압박 밴드가 도움이 되는 가’ 항목에 대해 순위 평가를 실시하였다. 이때 쿼드 (Quad) 분석 방식을 사용하여 반복 평가 대상이 다수 일 때 단순 일대일 비교가 아닌 부분 블록의 조합으 로 보다 효율적인 결과가 도출되도록 하였다. 즉, 실험 부위에 각각의 번호를 부여하고(1: 허벅지, 2: 종아 리, 3: 발목, 4: 허벅지+종아리, 5: 허벅지+발목, 6: 종 아리+발목, 7: 허벅지+종아리+발목), 피험자는 4개씩 총 7조합(1235/1247/1456/1367/3457/2346/2567)을 평 가하였다. 결과적으로 모든 비교가 종료되면 평가한 값을 합하여 가장 작은 것을 최종 선호 순위로 정했다. 다음으로 부분 압박 밀착 바지와 일반 바지를 웨어 러블 로봇 내에 착용 시 뇌파와 심전도 차이를 비교하 였다. 일반 바지의 혼용률은 면 35.0%와 나일론 65.0% 였고, 사이즈 스펙은 허리: 86.6 cm, 엉덩이: 108.2 cm, 총길이: 100.8 cm였다. 실험에 사용한 웨어러블 로봇
Fig. 1. Pattern of experimental pants.
은 <Fig. 2>에 나타낸 바와 같이 걷기 동작 보조를 위 해 만들어진 제품이었다(ExoAtlet-Ⅱ, ExoAtlet Asia Co., Ltd., Seoul, Korea).
바지 종류에 따른 뇌파와 심전도 측정은 실험실 (온도 : 23±2℃, 습도 : 50±5%RH)에서 이루어졌다. 피 험자는 실험실에 입실 후 10분 정도 충분한 휴식을 취한 후 뇌파 전극이 부착된 캡형의 뇌파 전극 모자 (Biobrain Inc., Daejeon, Korea)를 착용하였고, 양쪽 손 목 안쪽에 심전도 전극을 부착하였다. 뇌파 측정 시 간과 방법은 선행연구(Choi et al., 2014; Lee & Cho, 2015)를 참고하여 설정하였다. 의복 변인과 관련된 뇌파 측정은 착용감을 중점적으로 결과가 나타날 수 있도록 데이터 노이즈를 줄이기 위해 대부분 의자에 앉아 안정한 상태에서 측정하였고, 시각이 결과에 영향을 줄 수 있다고 언급되어, 피험자가 편안하게 앉은 자세로 베이스 뇌파와 심전도를 눈을 감은 상 태에서 2분, 눈을 뜬 상태에서 2분간 유선 8채널 폴 리그래프 시스템인 BIOS-S8(BioBrain Inc., Daejeon, Korea)로 측정하였다. 뇌파 측정 위치는 국제전극배 치법(Jasper, 1958)에 의해 F3(좌반구 전두엽), F4(우 반구 전두엽), T3(좌반구 측두엽), T4(우반구 측두엽), P3(좌반구 후두엽), P4(우반구 후두엽), Cz(정수리) 총 7개의 위치를 선정하여 측정하였다. 제작된 실험 용 부분 압박 밀착 바지와 일반 바지 위에 웨어러블 로봇을 착용한 사진은 <Fig. 3>에 제시하였다. 생리 신호 측정 후 마지막으로 피험자는 허벅지, 종아리, 발목, 전체로 나누어 착용감, 동작 용이성, 피부 마찰 감, 쾌적성에 대한 주관적 감각에 응답하였다. 척도 는 1: 매우 나쁨~4: 보통 7: 매우 좋음으로 7점 리커트 척도로 평가하였다. 3. 자료 분석 분석은 IBM SPSS Statistics 24.0을 사용하여 기술 통계분석을 실시하였으며, 실험 의복에 따른 뇌파와 심전도 지표 값의 차이를 알아보기 위해 독립표본 t-검정을 통해 분석하였다. 주관적 감각 평가도 기술 통계분석을 실시하였고, 일반 바지와 기능성 부분 압 박 밀착 바지의 차이를 알아보기 위해 독립표본 t-검 정을 하였다.
III. 연구결과
1. 기능성 부분 압박 밀착 바지 제작을 위한 걷 는 동작 시 최적 압박 부위 도출 피험자는 걷는 동작 시 하지의 효율적인 압박 부 위를 7점 척도(1: 매우 나쁨~4: 보통~7: 매우 좋음)로 분석한 결과는 <Table 3>에 정리하였다. 압박을 선호 하는 부위는 전체>종아리+발목>허벅지+발목>허벅Fig. 2. ExoAtlet-II wearable robot.
Reprinted from ExoAtlet-II (n.d.). http://www.exoatletasia.com
Fig. 3. Experimental compression pants (left) and wear-ing regular pants inside a ExoAtlet-1 wearable robot (right).
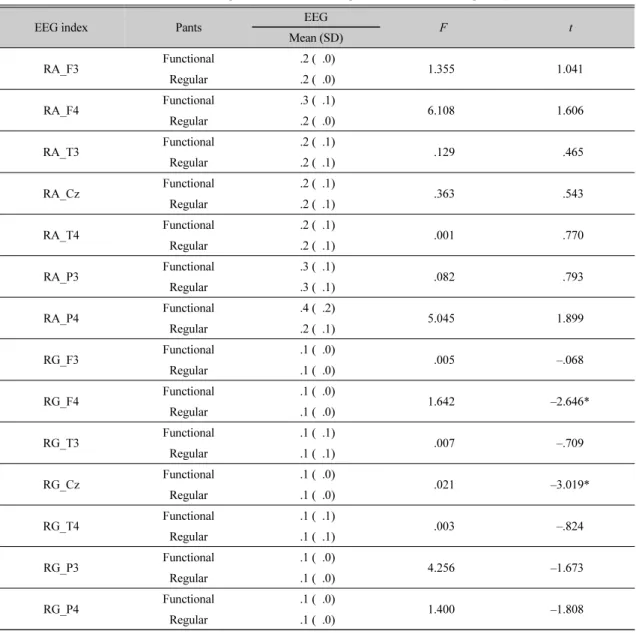
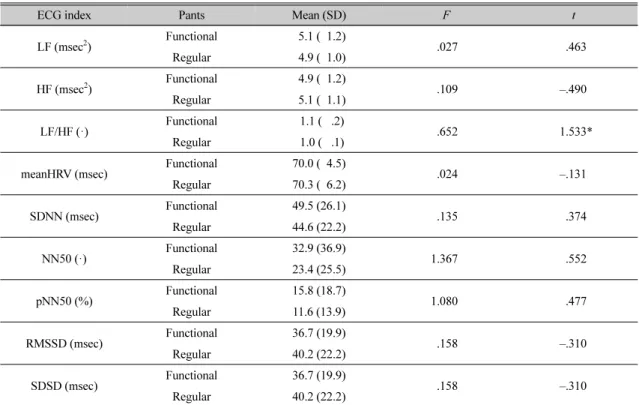
지+종아리>종아리>발목>허벅지 순으로 나타났다. 즉, 20대 남성은 걷는 동작 시 종아리, 발목, 허벅지 모든 부위를 전체적으로 압박을 주는 것을 선호하였 다. 선행연구에 따르면 장시간 서서 근무하는 근로자 를 대상으로 발목과 종아리에 탄력 압박 밴드를 착 용하면 피로도가 유의하게 감소하여 하지부종 및 피 로도에 효과가 있다고 하였는데, 본 연구에서도 선 행연구와 마찬가지로 허벅지, 종아리, 발목의 모든 부위에 압박 밴드를 착용하고 걷는 것을 선호하는 것으로 나타나, 이 부위에 적절한 압박을 가하는 것 이 긍정적 효과가 있을 수 있음을 확인하였다(Lim et al., 2012). 2. 웨어러블 로봇 내 착용 바지에 따른 뇌파와 심 전도 차이 뇌파와 심전도 측정 결과는 눈을 뜨고 2분, 눈을 감고 2분을 측정하였는데, 모두 눈을 뜨고 측정한 결 과에서 유의미한 차이가 나타났다. 일반적으로 뇌파 지표별 주파수의 범위는 델타(Delta, 0.1~4 Hz), 세타 (Theta, 4~8 Hz), 알파(Alpha, 8~13 Hz), SMR(Sensori-motor rhythm, 12~15 Hz), 베타(Beta, 15~40 Hz), 로우 베타(Low beta, 12~16 Hz), 미들베타(Middle beta, 18 ~24 Hz), 하이베타(High beta, 24~30 Hz), 감마(Gamma, 40~300 Hz)로 분류되고 있다. 알파파는 긴장이 이완 되고 편안한 상태에서 나타나며, 감마파는 고도의 인지 작용을 할 때나 극도로 흥분했을 때 나타난다 고 알려져 있다(Lee, 2014). 먼저, 뇌파 측정 결과는 <Table 4>에서 보는바와 같이 상대 알파파(RA)와 상대 감마파(RG)에서 착용 바지에 따른 차이를 보였다. 보다 구체적으로 RA지표에 대해 <Fig. 4>에 다시 나타낸 결과, 통계적으로 유의차는 없었지만, 모든 부위에서 기능성 부분 압박 밀착 바지를 착용했을 때가 일반 바지를 착용했을 때보다 높게 활성화되 었다. RA지표는 앞에서 언급했듯이 안정과 휴식을 의미하며 값이 클수록 좋은 것으로 해석하므로 이 는 기능성 부분 압박 밀착 바지를 착용했을 때 보다 안정감을 느꼈다는 것으로 추측할 수 있다. 또한, RG지표를 다시 나타낸 <Fig. 5>를 보면 전두 엽(F4)과 정수리(CZ)에서 통계적으로 유의미한 차 이가 관찰되었고, 기능성 부분 압박 밀착 바지를 착 용했을 때 모든 측정 부위에서 RG지표의 활성화가 감소하였다. RG지표는 불안, 스트레스, 각성 등을 의 미하며 값이 작을수록 좋은 것으로 해석하므로 기능 성 부분 압박 밀착 바지의 착용은 인지적 부담과 스 트레스를 감소시켜 쾌적감을 증진시킬 수 있음을 알 수 있었다. 현재 RG지표 분석과 관련된 선행연구로 는 주로 후각이나 시각과 관련된 것이 대부분으로 Ryu et al.(2013)에 의하면 안 좋은 냄새가 나는 공간 에 지속해서 있으면 감마파의 증가가 두드러지게 나 타난다고 하였으며, Kim and Heo(2020)는 빨간색의 채도와 명도 변화에 따른 뇌파를 측정 결과, 명도와 채도가 높은 강렬한 빨간색을 볼 때 상대적으로 더 많은 감마파가 증가한다고 하였다. Han et al.(2012) 의 연구에서는 EDT(Emotion development therapy)기 법의 주기적 사용으로 감마파 감소에 일부 도움이 된다고 하였다. 그러나 아직까지 의류학 분야에서 의류가 RG지표에 영향을 주는지 알 수가 없었는데, 본 연구결과를 통해 기능성 의류 개발은 착용자에게 긴장, 각성, 흥분, 불안 등을 감소시킬 가능성이 있음 을 확인하였다. 다음으로 심전도 결과는 <Table 5>에 나타내었다. 교감신경계와 부교감신경계는 적당한 비율로 균형 을 이루는 것이 중요한데, 스트레스를 받거나 격렬 한 운동을 하게 되면, 안정 상태에서 유지되는 자율 신경계의 적절한 균형이 무너지게 되면서 부교감신 경계의 활성은 줄어들고 교감신경계가 주로 활성화 되는 것으로 알려져 있다(Choi & Noh, 2004).
심전도 분석 지표는 주파주 범위 분석 지표인 LF (Low frequency, 0.04~0.15 Hz)와 부교감신경의 활동 지표인 HF(High frequency, 0.15~0.4 Hz)의 대역으로 구분하여 교감과 부교감신경의 균형을 나타내는 지표 인 LF/HF가 있다. 시간 범위 분석 지표인 HRV(Heart Participants Thigh Calf Ankle Thigh + Calf Thigh + Ankle Calf + Ankle Whole
Mean (SD) 12.4 (4.1) 10.1 (2.8) 10.9 (4.0) 10.0 (3.2) 9.8 (2.6) 9.3 (2.7) 7.3 (3.1)
Rank 7 5 6 4 3 2 1
rate variability)는 교감신경의 활동 지표인 심장박동 의 변화를 나타내고, SDNN(Standard deviation of NN intervals)은 특정한 시간 간격의 정상 R-R간격의 표준 편차를 나타내며, SDSD(Standard deviation of differ-ence between adjacent NN intervals)는 인접한 R-R간격 차이의 표준편차를 나타낸다. NN간격 사이의 차이가
50 msec보다 큰 경우의 수를 표시하는 NN50이나 전 체 NN간격 중 NN50의 비율을 표시하는 pNN50(The proportion of NN50 divided by the total number of NN intervals)은 심장박동 간격의 안정성을 확인할 수 있으 며, RMSSD(Root mean square of successive differences) 와 같이 심장에서 부교감신경의 활동을 평가할 수 있
EEG index Pants EEG F t
Mean (SD) RA_F3 Functional .2 (0.0) 1.355 1.041* Regular .2 (0.0) RA_F4 Functional .3 (0.1) 6.108 1.606* Regular .2 (0.0) RA_T3 Functional .2 (0.1) 0.129 0.465* Regular .2 (0.1) RA_Cz Functional .2 (0.1) 0.363 0.543* Regular .2 (0.1) RA_T4 Functional .2 (0.1) 0.001 0.770* Regular .2 (0.1) RA_P3 Functional .3 (0.1) 0.082 0.793* Regular .3 (0.1) RA_P4 Functional .4 (0.2) 5.045 1.899* Regular .2 (0.1) RG_F3 Functional .1 (0.0) 0.005 ‒.068* Regular .1 (0.0) RG_F4 Functional .1 (0.0) 1.642 ‒2.646* Regular .1 (0.0) RG_T3 Functional .1 (0.1) 0.007 ‒.709* Regular .1 (0.1) RG_Cz Functional .1 (0.0) 0.021 ‒3.019* Regular .1 (0.0) RG_T4 Functional .1 (0.1) 0.003 ‒.824* Regular .1 (0.1) RG_P3 Functional .1 (0.0) 4.256 ‒1.673* Regular .1 (0.0) RG_P4 Functional .1 (0.0) 1.400 ‒1.808* Regular .1 (0.0) *p<.05
EEG: Electroencephalogram, RA: Relative alpha, RG: Relative gamma, F3: Left hemisphere frontal lobe, F4: Right hemisphere frontal lobe, T3: Left hemisphere temporal lobe, T4: Right hemisphere temporal lobe, P3: Left hemisphere parietal lobe, P4: Right hemisphere parietal lobe, Cz: Parietal
ECG index Pants Mean (SD) F t LF (msec2) Functional 05.1 (01.2) 0.027 .4630 Regular 04.9 (01.0) HF (msec2) Functional 04.9 (01.2) 0.109 ‒.4900 Regular 05.1 (01.1) LF/HF (·) Functional 01.1 ( 0.2) 0.652 1.533* Regular 01.0 ( 0.1)
meanHRV (msec) Functional 70.0 (04.5) 0.024 ‒.1310 Regular 70.3 (06.2) SDNN (msec) Functional 49.5 (26.1) 0.135 .3740 Regular 44.6 (22.2) NN50 (·) Functional 32.9 (36.9) 1.367 .5520 Regular 23.4 (25.5) pNN50 (%) Functional 15.8 (18.7) 1.080 .4770 Regular 11.6 (13.9) RMSSD (msec) Functional 36.7 (19.9) 0.158 ‒.3100 Regular 40.2 (22.2) SDSD (msec) Functional 36.7 (19.9) 0.158 ‒.3100 Regular 40.2 (22.2) *p<.05
ECG: Electrocardiogram, LF: Low frequency, HF: High frequency, LF/HF: Ratio between LF and HF, HRV: Heart rate variability, SDNN: Standard deviation of NN, NN50: RR intervals differing more than 50ms, pNN50: NN50 divided by the total number of all RR intervals, RMSSD: Root mean square of successive differences, SDSD: Standard deviation of difference between adjacent NN intervals
Table 5. T-test of changes in ECG according to functional and regular pants
RA: Relative alpha, F3: Left hemisphere frontal lobe, F4: Right hemisphere frontal lobe, T3: Left hemisphere temporal lobe, T4: Right hemisphere temporal lobe, P3: Left hemisphere parietal lobe, P4: Right hemisphere parietal lobe, Cz: Parietal
Fig. 4. Comparison of RA EEG results of functional and regular pants.
*p<.05
RG: Relative gamma, F3: Left hemisphere frontal lobe, F4: Ri-ght hemisphere frontal lobe, T3: Left hemisphere temporal lobe, T4: Right hemisphere temporal lobe, P3: Left hemisphere pari-etal lobe, P4: Right hemisphere paripari-etal lobe, Cz: Paripari-etal
Fig. 5. Comparison of RG EEG results of functional and regular pants.
는 측정치이다. 본 연구 심전도 분석 결과, 이러한 지 표 중 LF/HF지표에서 통계적으로 유의미한 차이가 나타났다. LF/HF지표는 LF와 HF 간의 비율을 의미 하는 것으로 자율신경계의 전체적인 균형 정도를 반 영하는데, 정상 범위는 0.5~2.0 이내이다. 기능성 부 분 압박 밀착 바지와 일반 바지를 착용했을 때 모두 LF/HF지표는 모두 정상 범위 내에 있었으나, 기능성 부분 압박 밀착 바지를 착용하면 LF/HF지표가 더 큰 값을 나타내었다. 이는 기능성 부분 압박 밀착 바지 착용 시 교감신경이 보다 활성화되어 일반 바지를 착 용했을 때보다 보다 각성이 되고, 기능성 부분 압박 밀착 바지를 더 예민하게 인식한 것을 의미한다. 3. 웨어러블 로봇 내 착용 바지에 따른 주관적 평 가 웨어러블 로봇 안에 착용한 바지의 종류에 따른 주관적으로 감각 차이는 <Table 6>에 나타내었다. 두 실험복 간에는 모두 유의미한 차이가 있었고, 기능 성 부분 압박 밀착 바지 착용 시 7점 척도로 평가한 결과는 착용감 6.0점, 동작 용이성 6.6점, 피부 마찰감 6.2점, 쾌적성 6.0점으로 나타났으며, 일반 바지 착용 시 착용감 4.6점, 동작 용이성 4.6점, 피부 마찰감 4.9점, 쾌적성 5.0점으로 나타났다. 모든 항목에서 기능성 부분 압박 밀착 바지를 입은 후 웨어러블 로봇을 착 용하는 것을 더 선호하였다. 특히, 동작 용이성에서 큰 점수 차를 보였다. 일반적으로 주관적 감각은 소재, 패턴, 봉제 등 여러 요인이 결합되어 완성된 의복 전 체에 대해 복합적인 감정으로 도출된다. 본 연구에 사용된 부분 압박 밀착 바지의 소재는 실험용 일반 바지의 소재에 비해 상대적으로 신장률이 우수하고, 웨어러블 로봇과 함께 착용하기에 적합한 여유분으 로 설계되어 착용감, 동작 용이성, 피부 마찰감, 쾌적 성 모든 영역에 영향을 준 것으로 판단된다. 따라서 웨어러블 로봇 내에 용도와 목적에 따른 기능성 의류 를 착용한 것은 주관적으로도 크게 영향을 미칠 수 있음을 확인할 수 있었다. 더불어 기능성 부분 압박 밀착 바지에 대해 주관 적으로 느끼는 압박 정도를 부위별로 응답한 결과는 <Table 7>과 같았다. 압박 정도는 피험자가 불쾌함을 느끼지 않고, 적당한 압박감을 느끼면 7점에 응답하 도록 하였다. 전체적으로 압박 정도는 4.0점 이상으 로 평가하였고, 부위별로 허벅지는 5.5점, 종아리는 4.6점, 발목은 5.6점, 모든 부위는 5.8점으로 압박 정 도는 보통 이상으로 나타났다. 다만, 본 연구에서는 부위별 일괄적인 압박 수준으로 부분 압박 밀착 바 지를 제작하였는데, 종아리 부위 점수가 다소 낮은 것 으로 보아 추후 부위별 최적의 압박 정도를 선정하 여 기능성 의류를 개발한다면 보다 효율성이 더 증대 될 것으로 사료된다.
IV. 결 론
본 연구는 웨어러블 로봇 착용 시 보다 효율적인 Mean (SD)Thigh Calf Ankle Whole
Compression level 5.5 (0.9) 4.6 (0.9) 5.6 (1.0) 5.8 (0.7)
Table 7. Subjective evaluation of wear compression level for functional pants
Variable Mean (SD) t
When wearing functional pants When wearing regular pants
Wear fit 6.0 (0.8) 4.6 (0.9) ‒3.274**0 Easy of movement 6.6 (0.5) 4.6 (0.7) ‒6.242*** Skin friction 6.2 (0.9) 4.9 (0.8) ‒3.194**0 Wear comfort 6.0 (0.5) 5.0 (0.9) ‒3.969**0 **p<.01, ***p<.001
작업이 가능하도록 기능성 부분 압박 밀착 바지를 제작하고, 이의 효과를 생체신호인 뇌파와 심전도 및 주관적 평가를 통해 검증해보고자 하였으며 다음 과 같은 결과를 얻었다. 첫째, 하지형 로봇 착용 시 외골격이 직접 몸에 닿 는 부분을 변인으로 걷는 동작 동안 선호하는 압박 부위를 평가한 결과, 허벅지, 종아리, 발목 전체를 모 두 압박하는 것이 좋은 것으로 나타났다. 즉, 걷는 동 작 시 일반 바지를 입는 것보다는 특정 부분에 압박 을 가하는 것을 선호함을 알 수 있었고, 이의 결과를 반영하여 기능성 부분 압박 밀착 바지를 제작할 수 있었다. 둘째, 웨어러블 로봇 착용 시 기능성 부분 압박 밀 착 바지와 일반 바지를 입고 뇌파를 측정한 결과, 눈 을 감고 측정한 것은 통계적으로 유의미한 차이가 나타나지 않았으며, 눈을 뜨고 측정한 결과에서 통 계적으로 유의미한 차이가 나타났다. 이 중 RA와 RG 지표에서 바지 종류에 따른 유의미한 활성화 차이 를 보여 기능성 부분 압박 밀착 바지의 착용은 착용 자에게 안정감을 높이고, 불안과 스트레스를 감소 시켜 보다 쾌적하고 행복감이 증진될 수 있음을 알 수 있었다. 또한, 뇌에서 인지하는 의복 착용감은 종 합적인 감각으로 시각 차단이 오히려 유의한 차이를 감지하는데 단점이 있음을 확인할 수 있었고, 일반 적인 뇌파 측정 시 사용하는 시각 차단 유무를 의복 에서는 고려하지 않아도 됨을 알 수 있었다. 셋째, 심전도 측정 결과, LF와 HF 간의 비율을 의 미하는 지표에서 통계적 유의미한 결과가 나타났고, 기능성 부분 압박 밀착 바지 착용은 일반 바지 착용 보다 교감신경과 부교감신경의 균형성을 보였다. 따 라서 기능성 부분 압박 밀착 바지 착용이 착용자에 게 높은 쾌적성을 부여할 것으로 예상된다. 넷째, 웨어러블 로봇 내에 기능성 부분 압박 밀착 바지와 일반 바지 착용 시 주관적 감각 차이를 분석 한 결과, 기능성 부분 압박 밀착 바지 착용이 착용감, 동작 용이성, 피부 마찰감, 쾌적성 모든 항목에서 유 의미하게 우수하였다. 한편, 주관적으로 느끼는 기 능성 부분 압박 밀착 바지의 압박 정도는 허벅지, 종 아리, 발목, 전체 부위에서 모두 4.0점 이상으로 높게 나타났으나, 부위별 압박 정도를 조절하는 추후 연 구가 필요함을 확인하였다. 종합적으로 웨어러블 로 봇과 함께 착용하는 기능성 의류의 개발이 필요한 시점이며, 의류학 분야에서 적극적으로 시도할만한 가치가 있음을 알 수 있었다. 다만, 본 연구에서는 정 확한 생리 데이터를 획득하기 위해 정적인 자세에서 평가를 진행하였기에, 다음에는 동적 자세에서 다양 한 객관적 측면에서 기능성 의류의 효율성을 검증해 보고자 한다.
Refere
nces
ASTM International. (2020). ASTM D2594-20, Standard test method for stretch properties of knitted fabrics having low
power. ASTM International. Retrieved from https://www.astm.
org/Standards/D2594.htm
Bang, H. Y., & Kim, H. E. (2012). Assessment of the wearing com-fort of clothing for the elderly women by EEG and ECG ana-lyses. Journal of the Korean Society for Clothing Industry, 14(6), 1010‒1017. doi:10.5805/KSCI.2012.14.6.1010 Cerasa, A., Pignolo, L., Gramigna, V., Serra, S., Olivadese, G.,
Rocca, F., ... Tonin, P. (2018). Exoskeleton-robot assisted the-rapy in stroke patients: A lesion mapping study. Frontiers in
Neuroinformatics, 12:44. doi:10.3389/fninf.2018.00044
Choi, B.-M., & Noh, G.-J. (2004). Heart Rate Variability, HRV. Anesthesia and Pain Medicine, 8(2), 45‒86.
Choi, J., Kim, N., Wu, Y., & Hong, K. (2014). Effects of 3D com-pression suits on EEG analysis during and after walking. Jo-urnal of the Korean Society of Clothing and Textiles, 38(4), 440‒454. doi:10.5850/JKSCT.2014.38.4.440
Cole, J. (2016). Patternmaking with stretch knit fabrics. New York and London: Fairchild Books.
ExoAtlet-II. (n.d.). ExoAtlet Asia. Reprinted from http://www. exoatletasia.com/cms/index.php?cidx=5&lang=eng Han, B., Kim, W., & Hong, S. (2012). The study on the effect of
relaxation of stress E.D.T applies. Journal of the Korean So-ciety of Radiology, 6(6), 515‒520. doi:10.7742/jksr.2012.6. 6.515
Han, J.-E., & Chun, C.-Y. (2019). Electroencephalogram(EEG) change due to thermal displeasure when exposed to a sudden temperature increase. Journal of Korean Society Living En-vironment System, 26(4), 445‒450. doi:10.21086/ksles.2019. 08.26.4.445
He, Y., Li, N., Wang, C., Xia, L.-q., Yong, X., & Wu, X.-y. (2019). Development of a novel autonomous lower extremity exos-keleton robot for walking assistance. Frontiers of Information Technology & Electronic Engineering, 20(3), 318‒329. doi: 10.1631/FITEE.1800561
Jasper, H. H. (1958). Report of the committee on methods of cli-nical examination in electroencephalography.
Electroence-phalography and Clinical Neurophysiology, 10(2), 370‒375. doi:10.1016/0013-4694(58)90053-1
Jeong, J.-H., Ryu, J.-H., Jo, J.-H., & Kim, H. (2009). The study for seamless garment design for detection of precordial leads of electrocardiography. Proceedings of the Korean Society for Emotion and Sensibility, Fall Conference, Korea, 202‒ 205.
Jeong, J.-R., & Kim, H.-E. (2009). Assessment of the wear com-fort of outdoorwear by ECG and EEG analyses. Journal of the Korean Society of Clothing and Textiles, 33(10), 1665‒1672. doi:10.5850/JKSCT.2009.33.10.1665
Jeong, Y. (2006). 2D pattern development of tight-fitting body-suit from 3D body scan data for comfortable pressure sensa-tion. Korean Journal of Human Ecology, 15(3), 481‒490. Jeong, Y., Kim, S.-H., & Yang, Y. (2010). Development of
tight-fitting garments with a portable ECG monitor to measure vi-tal signs. Journal of the Korean Society of Clothing and Tex-tiles, 34(1), 112‒125. doi:10.5850/JKSCT.2010.34.1.112 Kang, B.-S., Kang, D.-H., Kim, S.-I., & Park, W.-J. (2019).
De-velopment of a wearable soft robot for rehabilitation and mo-tion assistance. Journal of Institute of Control, Robotics and Systems, 25(3), 255‒259. doi:10.5302/J.ICROS.2019.19.80 01
Kim, H., & Heo, J. (2020). A study on the influence of RED on brain wave. Proceedings of the Korea Society of Color Stu-dies, Spring Conference, Korea, 111‒113.
Kim, H. S., Koo, D. S., Nam, Y. J., Cho, K.-J., & Kim, S. (2019). Research on technology status and development direction of wearable robot. Fashion & Textile Research Journal, 21(5), 640‒655. doi:10.5805/SFTI.2019.21.5.640
Kim, S., & Hong, K. (2012). Engineering design process of tight-fit sportswear using 3D information of dermatomes and skin deformation in dynamic posture. Korean Journal of Human Ecology, 21(3), 551‒565. doi:10.5934/KJHE.2012.21.2.551 Korean Agency for Technology and Standards. (2015). 7차 인 체치수조사 [The 7th national anthropometric survey report]. Size Korea. Retrieved from https://sizekorea.kr/page/report/1 Kwon, C.-R., & Kim, D.-E. (2019). Development of women's
cycle wear top with improved function. Fashion & Textile Research Journal, 21(1), 75‒87. doi:10.5805/SFTI.2019.21. 1.75
Lee, H.-D., & Han, C.-S. (2014). Technical trend of the lower limb exoskeleton system for the performance enhancement. Jour-nal of Institute of Control, Robotics and Systems, 20(3), 364 ‒371. doi:10.5302/J.ICROS.2014.14.9023
Lee, H., Yu, S. N., Lee, S., Jang, J., Han, J., & Han, C. (2009). Development of command signal generating method for assis-tive wearable robot of the human upper extremity. Journal of Institute of Control, Robotics and Systems, 15(2), 176‒183.
doi:10.5302/J.ICROS.2009.15.2.176
Lee, H. J., Kim, N. Y., Hong, K. H., & Lee, Y. J. (2015). Selection and design of functional area of compression garment for im-provement in knee protection. Korean Journal of Human Ecology, 24(1), 97‒109. doi:10.5934/kjhe.2015.24.1.97 Lee, M.-S., & Cho, B.-J. (2015). Effects of the brain waves
ac-cording to participation in therapeutic recreation programs on the depression, sleep disturbance and quality of life in the el-derly with dementia. Journal of the Korea Academia-Indust-rial cooperation Society, 16(8), 5096‒5110. doi:10.5762/ KAIS.2015.16.8.5096
Lee, O., Lee, B., & Hong, K. (2019). Effects of brassiere wing length and front panel band width on physiological response and sensorial pressure evaluation. Korean Journal of Human Ecology, 28(4), 391‒401. doi:10.5934/kjhe.2019.28.4.391 Lee, S.-Y. (2014). Analysis of EEG by tactile sensation of
fab-ric. Journal of the Korean Society of Costume, 64(4), 118‒130. doi:10.7233/jksc.2014.64.4.118
Lim, D. C., Song, H., Oh, J. K., & Lee, M. K. (2012). The effects of the application of elastic compression band on lower extre-mity edema and fatigue in aged standing worker. Journal of the Global Senior Health Promotion Institute, 2(2), 43‒53. MacRae, B. A., Cotter, J. D., & Laing, R. M. (2011).
Compres-sion garments and exercises: Garment considerations, physi-ology and performance. Sports Medicine, 41(10), 815‒843. doi:10.2165/11591420-000000000-00000
Mills, C., Scurr, J., & Wood, L. (2011). A protocol for monitoring soft tissue motion under compression garments during drop landings. Journal of Biomechanics, 44(9), 1821‒1823. doi: 10.1016/j.jbiomech.2011.04.019
Park, M.-J., & Lee, K.-H. (2014). Design of the lower limb exo-skeleton for the walk-assistance. Proceedings of the Korea Society of Computer Information, Summer Conference, Korea, 22(2), 17‒18.
Park, S., & Hong, S. (2018). A study on the application of ergo-nomic dimensions in the wearable back-muscular strengthen robot design. Journal of Industrial Design, 12(1), 19‒28. do i:10.37254/ids.2018.03.43.03.19
Ryu, H., Ko, W., Kim, J., Kim, S., & Kim, M. K. (2013). Electro-encephalography activities influenced by classroom smells of male high school. Science of Emotion & Sensibility, 16(3), 387‒396.
Sandoval-Gonzalez, O., Jacinto-Villegas, J., Herrera-Aguilar, I., Portillo-Rodiguez, O., Tripicchio, P., Hernandez-Ramos, M., ... Avizzano, C. (2016). Design and development of a hand exoskeleton robot for active and passive rehabilitation. Inter-national Journal of Advanced Robotic Systems, 13(2):66. doi: 10.5772/62404
Military applicability analysis. Journal of the Korean Society for Precision Engineering, 35(10), 925‒931. doi:10.7736/ KSPE.2018.35.10.925
Ziegert, B., & Keil, G. (1988). Stretch fabric interaction with ac-tion wearables: Defining a body contouring pattern system. Clothing and Textiles Research Journal, 6(4), 54‒64. doi:10. 1177/0887302X8800600408
박 소 영
충남대학교 의류학과 대학원생
이 예 진