디젤 엔진 구동축 시스템의 비틀림 진동에 대한 기본 계산은 1900년대 Bauer가 이에 대한 논문을 발표한 이후 많은 사람들의 노력으로 완성되었습니다[2]. 그러나 여전히 감쇠에너지 계산과 프로펠러 수의 합산이 필요하며, 프로펠러 토크 변동 및 그 위상의 고조파 등의 불확실성과 측정 기술의 발전으로 인해 완벽한 계산은 불가능하지만, 컴퓨터 및 프로그래밍 기술의 발전과 측정 장비의 성능 향상으로 인해 다양한 선박용 엔진 및 선박 추진축 시스템에 대한 정보가 필요하며, 측정 결과를 바탕으로 고유진동수를 예측할 수 있는 단계에 이르렀습니다. ±3% 이내로, 공진점에서의 진폭은 ±5% 이내의 오차 범위 내에서 예측할 수 있다. 또한 데이터의 신뢰성을 확보하기 위해 MAN B&W에서 제공하는 고조파를 이용하여 비틀림 진동을 계산하고 서로 비교하였다. 원하는 시간에 원하는 양을 정확히 제어하는 것이 목표이며, 이를 달성하기 위해 기존 캠 방식 엔진에서 제거된 부품은 다음과 같다[1].
여기서 피스톤 A는 왕복운동을 하고, 크랭크 B는 회전운동을 하며, 커넥팅 로드 AB는 두 운동을 동시에 수행하며, 상사점 에서 측정된 피스톤 변위를 그림에서 라 하자.
이므로
이항정리를 이용하여 근수안의 근호를 전개하고 이를 삼각함수법으로 재구성한 후, 는 일반적으로 작은 값을 가지므로 보다 작은 값을 무시하면 피스톤의 변위 는 다음과 같다. 왕복엔진의 크랭크샤프트에는 실린더 내의 가스압력과 왕복질량 관성력에 의한 회전모멘트가 작용한다. 이러한 압력은 지속적으로 변동하기 때문에 크랭크 회전 모멘트가 매우 고르지 않게 됩니다. 그림에서. 3.2는 커넥팅 로드에 의해 생성된 결과 압력 입니다. 이는 크랭크로 전달되어 크랭크 [3]을 [10]으로 회전시킵니다. 이는 엔진의 질소산화물 생성 및 성능에 대한 최적화 조정을 하기 전 연소실 압력을 측정한 결과입니다.
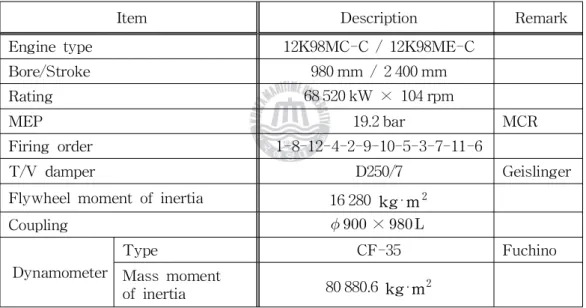
본 논문에서 연구대상으로 선정한 엔진과 동력계의 주요 세부사항과 차축 시스템 배치를 각각 Table 4.3과 Fig.에 나타내었다. 연구중인 선박은 중간축의 비틀림 응력을 줄이기 위해 엔진 크랭크에 비틀림 진동 댐퍼를 설치하였으며, 이를 축 전면에 장착하고 동력계를 엔진시험공장에서 시험운전 시 엔진에 부하를 가하기 위한 커플링 샤프트. 표 4.3 엔진 및 동력계의 일반 세부사항 항목 설명 설명 엔진 형식 12K98MC-C /12K98ME-C. 그림 4.36 12K98MC-C의 등가질량탄성계. 그림 4.37 12K98ME-C의 등가 질량-탄성 시스템. 표 4.4 12K98MC-C와 12K98ME-C 엔진의 4가지 모드 형상에 대한 고유진동수 비교. 그림 4.40 12K98MC-C 커플링 샤프트의 전압 다이어그램. 표 4.6 12K98ME-C 엔진의 4가지 모드 형상을 갖는 45차수에 대한 고유 주파수. 단위: cpm) 1노드 2노드 3노드 4노드를 주문하세요.
연결축의 복합비틀림응력을 비교해 보면 작동범위 전체에 걸쳐 거의 동일하나, 4차 진동모드의 고유진동수가 100과 104rpm 사이에서 차이가 나기 때문에 공진점 18차의 위치는 약 2.1 정도이다. 12K98MC-C 모터의 RPM이 낮아집니다. .본 계산에 사용된 12K98ME-C 엔진의 고조파계수는 SFOC(Specific Fuel Oil Consumption) 모드를 사용하였지만, 다른 모드인 NOx 모드를 사용하면 여러 차수에서 조금씩 다른 패턴을 보여 회전력이 발생하게 된다. 스트레스 좀 덜 받으세요. SFOC 모드는 연소 압력을 조절해 연료 소비를 줄이고, NOx 모드는 연소 압력을 조절해 질소 화합물 생성량을 줄인다. 이때 연소압력의 변화에 따라 고조파계수가 조금씩 변화하게 된다. 이는 일반적으로 NOx 모드에서 최대 연소 압력이 더 낮기 때문입니다. 회전진동값이 낮은 것 같습니다. 본 연구에서는 대형 저속 디젤엔진의 공장 시험운전 시 연료분사압력과 연소압력을 측정하고, 기존의 캠형 엔진과 최근 출시된 전자제어엔진과 비교하였다. 또한, 이 데이터를 이용하여 조화계수를 구하고, 이 방법으로 비틀림 진동을 계산하였으며, 그 결과를 정리하면 다음과 같다.
1) MBD에서 공급하는 MC와 ME형 엔진의 가스 고조파를 비교한 결과, 저부하에서는 큰 차이가 없으나, 85% 이상의 고부하에서는 MC 엔진의 압축압력이 변화하면서 ME형 모터의 경우 는 일정한 값을 가지므로 ME 형식 모터의 고조파는 약간 낮은 것 같습니다. 2) 실제 제작된 엔진에서 측정한 MC와 ME Type 엔진의 가스 고조파를 비교한 결과는 MBD에서 제공하는 가스 고조파 운동을 비교한 결과와 동일하며 ME Type 엔진의 고조파가 나타난다 부하가 걸리면 약간 낮아집니다. 6) 상기 고조파에 의한 비틀림 진동 응력을 계산하고 비틀림 진동에 의한 진동 응력 값을 비교한 결과, 캠 엔진과 전자제어 엔진 사이의 비틀림 진동에는 거의 차이가 없는 것으로 나타났다.
앞으로는 서로 다른 엔진을 측정하여 고조파를 구해야 할 것이며, 공장 테스트에서는 문제가 되지 않았던 부품이 실제 선박에 설치하면 해상 테스트에서 문제가 되는 경우가 종종 있는데, 이는 에서 제공되는 고조파 때문일 것으로 의심되기 때문입니다. 에서는 다수의 데이터를 평균하여 구한 고조파를 실제 제조사에서 사용해야 한다고 가정한다.