1. INTRODUCTION
무인항공기의 조종 및 통제의 중추적인 역할을 사람이 수행하 는 원격조종항공기 (Remotely Piloted Aircraft) (Ahn et al. 2014) 의 경우, 조종사가 영상을 통한 조종을 수행할 때 동영상의 실시 간성이 중요시된다. 영상의 실시간성이 보장되지 않을 때 실제 상황과 조종사가 보는 영상 간의 시간차로 인하여 비상 상황에 대한 반응이 어렵다. 반면 실시간성이 보장되면 비상 상황에 대 한 반응을 더욱 빠르게 할 수 있다.
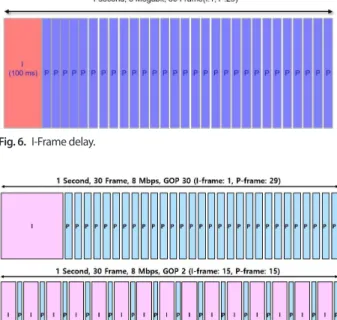
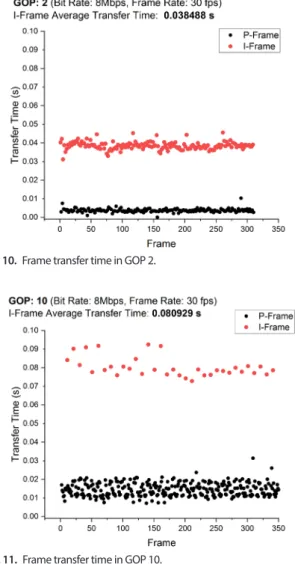
실시간성은 지연(delay)과 관련이 있다. 데이터 전송 분야의 지연에는 처리 지연, 전송 지연, 전파 지연 및 큐잉(queuing) 지연 이 있다. 데이터 전송 시 단말에서 데이터를 전송하기 전에 데이 터를 처리 위해 필요한 시간, 단말에서 링크로 데이터를 전송하 는 시간, 링크를 통해 데이터가 전파되는 시간 및 수신단의 출력 큐에서 데이터가 전시되기를 기다리는 시간이 필요하며, 상기 시 간의 합이 증가할수록 실시간성은 낮아진다. 하지만 일반적인 데 이터의 전송과 다르게 동영상 데이터 전송에는 프레임 데이터 크 기에 따라서도 지연이 증감한다. 해당 지연 현상은 프레임을 재 생하기 위해서는 온전한 하나의 프레임을 수신해야 하기 때문에 발생한다. 프레임의 크기가 크면 클수록 지연 시간이 길어진다.
Design of Real-time Video Acquisition for Control of Unmanned Aerial Vehicle
Min-Hwa Jeong
Agency for Defense Development, Daejeon 34060, Korea
ABSTRACT
In this paper, we analyze the delay phenomenon that can occur when controlling an unmanned aerial vehicle using a camera and describe a solution to solve the phenomenon. The group of pictures (GOP) value is changed in order to reduce the delay according to the frame data size that can occur in the moving image data transmission. The appropriate GOP values were determined through experimental data accumulation and validated through camera self-test, system integration laboratory (SIL) verification test and system integration test.
Keywords: unmanned aerial vehicle (UAV), delay, real-time, H.264, group of pictures (GOP)
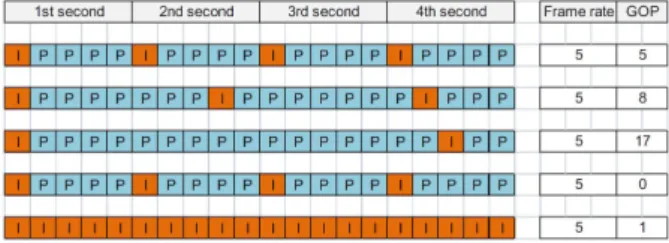
일반적으로 동영상 인코딩 및 디코딩 시, H.264 비디오 코덱 을 사용한다. H.264는 화상회의, 디지털 저장 매체, TV 방송, 인 터넷 스트리밍 및 통신을 위한 동영상 압축을 위해 개발되었고 (ITU-T 2019), 고선명 영상의 녹화, 압축 및 배포를 위한 일반적 인 비디오 코덱으로 높은 압축 효율을 나타낸다. H.264 비디오 코 덱을 사용하여 코딩한 동영상은 I-프레임과 P-프레임으로 구성 된다. I-프레임은 온전히 한 장의 영상 정보를 포함하여, 다른 프 레임의 정보를 참조하지 않는다. P-프레임은 I-프레임과 다르게 P-프레임 자체로는 한 장의 영상 정보를 온전히 나타내지 못하 며, 이전 프레임에서 변화된 영상 정보를 포함하고 있다. 일반적 으로 H.264 동영상은 하나의 I-프레임이 먼저 전송되고, 다수의 P-프레임이 뒤따르는 형태이다. 그리고 I-프레임과 P-프레임의 구성을 나타내기 위해 Group Of Pictures (GOP) 값을 사용한다.
GOP는 한 장의 I-프레임과 여러 장의 P-프레임으로 구성되며, GOP의 크기는 GOP의 I-프레임과 P-프레임의 개수 합이다. Fig. 1 과 같이 GOP의 크기가 5일 때는 I-프레임이 1장, P-프레임이 4장 이고, GOP의 크기가 17일 때는 I-프레임이 1장, P-프레임이 16이 Received Apr 29, 2020 Revised May 20, 2020 Accepted May 21, 2020
†