Vol.15, No.3, pp.30-44 (2021)
11.. 서서 론론
개인용 항공기(PAV; personal aerial vehicle)와 도 심 속 저고도 영역을 활용한 3차원 운송 수단인 도심 용 공중 모빌리티(UAM; urban air mobility)에 대한 관심이 국내외적으로 증가하고 있으며, 관련 연구/개발 이 활발하게 이루어지고 있다[1-5]. PAV와 UAM은 도심에서 운용되기 때문에 소형화, 경량화, 저소음 및
Actuator 기법을 이용한 제자리 비행하는 동축 반전 프로펠러 공력 성능에 관한 수치적 연구
김다혜 1 · 박영민 2 · 오세종 1 · 박동훈 1, †
1부산대학교 항공우주공학과
2한국항공우주연구원 항공기술연구부
Numerical Study on Aerodynamic Performance of Counter-rotating Propeller in Hover Using Actuator Method
Dahye Kim 1 , Youngmin Park 2 , Sejong Oh 1 and Donghun Park 1 †
1Department of Aerospace Engineering, Pusan National University
2Aeronautics Technology Research Division, Korea Aerospace Research Institute
Abstract
Experimental investigation of counter-rotating propellers is subject to multiple time and cost constraint because of additional design parameters unlike single propeller. Also, a lot of computing time and resources are required for numerical analysis due to consideration of the interference between the upper and lower propellers. In the present study, numerical simulations were conducted to investigate the hover performance of counter-rotating propellers by using actuator method which is considered to be time-efficient. The accuracy of the present numerical methods was validated by comparing the ANSYS Fluent which is commercial CFD code. The axial spacing and rotational speed were selected as the analysis variables, and the aerodynamic performance was obtained under various conditions. Based on the obtained results, the Figure of Merit (FM) of single propeller and counter-rotating propellers and a prediction factor which enables prediction of counter-rotating propeller performance using a single propeller were derived to evaluate availability of the actuator method.
초 초 록록
동축 반전 프로펠러는 기존의 단일 프로펠러와 달리 추가적인 설계 변수의 증가로 인해 실험적 성능 평가에 비용과 시간 측면에서 여러 제약이 따른다. 또한 상/하단 프로펠러 사이의 상호 간섭으로 인하 여 수치 해석에 있어서도 많은 시간과 자원이 요구된다. 본 연구에서는 시간 효율적인 수치해석기법인 actuator 기법을 활용하여 제자리 비행하는 동축 반전 프로펠러의 공력 성능에 관한 수치적 연구를 수행 하였다. 상용 CFD 코드인 ANSYS Fluent 결과와 비교하여 해석기법의 정확성을 검증하였다. 해석 변수 로는 동축 반전 프로펠러의 축 간극과 회전속도를 선정하였으며, 다양한 조건에서 동축 반전 프로펠러 의 공력 성능을 획득하였다. 획득한 공력 성능을 바탕으로 단일 프로펠러와 동축 반전 프로펠러의 제자 리 비행 효율 계수를 획득하고, 단일 프로펠러의 성능으로 동축 반전 프로펠러의 성능을 예측할 수 있 는 예측 인자를 도출하여 actuator 기법의 활용성을 평가하였다.
Key Words : Counter-rotating propeller(동축 반전 프로펠러), Personal aerial vehicle(개인용 항공기), Urban air mobility
(도심용 공중 모빌리티), Axial spacing(축 간극), Actuator method(액츄에이터 기법)
Received: Dec 21, 2020 Revised: Mar. 28, 2021 Accepted: Apr. 13, 2021
† Corresponding Author
Tel: +82-051-510-2377, E-mail: [email protected]
Ⓒ The Society for Aerospace System Engineering
친환경성 등이 중요한 설계 이슈로 고려되며, 그에 따 라 환경친화적이면서도 비교적 소음 발생이 적은 전기 동력 분산추진(electric-powered distributed propulsion) 방식이 주로 고려된다[6-7]. 분산추진 시 스템은 요구 추력 달성을 위해 다수의 프로펠러/로터 가 필요하며, 그 수에 비례하여 비행체의 크기 증가가 불가피하다. 이를 완화하기 위한 방안으로 동축 반전 프로펠러/로터가 많은 주목을 받고 있으며, 이에 대한 연구가 진행되고 있다[8-9].
국외에서는 동축 반전 로터 및 프로펠러와 관련하여 다양한 실험적, 수치적 연구가 수행되어왔다[10-17].
국내에서도 최근 들어 관련한 실험적, 수치적 파라미 터 연구 사례가 증가하고 있다. Song 등[18]은 동축 프로펠러의 시험 장치를 개발하여 공력 성능 측정을 수행하였으며, Sim 등[19]은 상용 CFD 코드를 활용 하여 슬라이딩 격자 기반의 수치적 연구를 수행하였 다. Park 등[20]은 수치적 연구를 통해 동축 반전 로 터의 제자리 비행과 전진 비행 시 축 간극에 따른 공 력 성능 및 유동장 변화를 분석하였다. 단일 프로펠러 와는 달리 동축 반전 프로펠러는 프로펠러 사이의 축 간극(axial spacing)이나 각 프로펠러의 회전속도 (RPM)와 같은 추가적인 파라미터가 존재하기 때문에, 성능 시험 및 파라미터 연구에 비용과 시간적 측면에 서 더 제약이 따른다. 또한 상/하단 프로펠러의 상호 간섭으로 인하여 복잡한 유동장이 형성됨에 따라 수치 적 관점에서도 많은 해석 시간과 자원이 요구되기 때 문에 여러 인자에 대한 상세한 파라미터 연구수행에 한계가 있어 연구 사례가 드물다.
이에 따라 동축 반전 프로펠러의 공력 해석과 성능
분석을 신속하게 수행할 수 있는 기법의 활용은 공학 적 활용 측면에서 매우 유용할 것으로 판단할 수 있 다. 신속한 해석 방법으로는 BEMT(blade element momentum theory)[21] 또는 ADM(actuator disk method)[22] 등이 대표적이나, 주로 단독 프로펠러에 대해 합리적인 결과를 제공하며 프로펠러 간 상호 간 섭과 비정상 후류 효과를 포함하는 경우에는 결과의 타당성을 보장할 수 없다.
상호 간섭 및 비정상 후류 효과를 고려하기 위해서 는 그에 상응하는 해석 방법이 요구된다. 본 연구에서 는 이러한 효과를 반영 가능하면서도 시간 효율적인
해석이 가능한 IASM(improved actuator surface method)[23]을 사용하여 동축 반전 프로펠러의 제자 리 비행 공력 해석을 수행하고, 운용조건과 파라미터 에 따른 공력 성능과 그 특성을 분석하였다. 또한 상 용 코드인 ANSYS Fluent[24]를 이용한 CFD 해석을 별도로 수행하여 결과 비교로부터 IASM의 정확도와 신뢰성을 확인하고, 해석 소요시간 비교를 통해 기법 의 시간 효율성을 평가하고자 하였다. 해석 결과를 바 탕으로 동축 반전 프로펠러의 제자리 비행 효율을 분 석하고, 단일 프로펠러의 성능으로부터 동축 반전 프 로펠러의 성능을 추정할 수 있는 간단한 예측 인자를 도출하고 평가하였다. 다양한 비행체 개발 시 유용하 게 활용 가능한 성능 특성 정보와 파라미터를 제시하 고, 동축 반전 프로펠러의 공력 해석에 대한 IASM의 유용성을 제시하고자 한다.
22.. 해해석석 방방법법
22..11 AAccttuuaattoorr 기기법법
본 연구에서는 프로펠러 공력 해석을 위하여 actuator 기반의 유동 해석기법을 사용하였다. 이 방 법은 디스크 또는 블레이드 영역의 셀에 모멘텀 소스 를 부과함으로써 프로펠러/로터 효과를 모사하며, 중첩 격자 또는 슬라이딩 격자 기법에 기반한 full CFD 대 비 전처리 및 해석 시간과 자원을 크게 절감할 수 있 어 신속한 해석과 분석에 유리하다. 따라서 시간 효율 적으로 프로펠러 효과를 반영한 유동 해석이 가능하므 로 공학적 활용 측면에서 매우 유용하며, 다수의 프로 펠러를 사용하는 분산추진 비행체의 설계와 개발에서 는 그 중요성이 강조된다. 대표적으로 프로펠러 1회전 평균 효과를 디스크 영역에 모사하는 ADM[22]과 각 블레이드 효과를 매시간마다 해당 영역에 개별적으로 모사하는 ALM(actuator line method)[25] 및 ASM(actuator surface method)[26] 등이 있다.
본 연구에서는 양력선 이론 기반의 속도 보정식을
사용하여 기존의 ASM이 갖는 기준선(reference line)
위치 선정의 임의성을 완화한 IASM을 사용하였다. 프
로펠러 영역에는 actuator surface 기법을 적용하며,
그 외 영역에는 오픈 소스 CFD 툴박스인
OpenFOAM[27]의 비압축성 비정상 유동 해석자인
PIMPLE(PISO+SIMPLE)을 적용한다. 지배방정식은 블레이드 효과 모사를 위해 깃 요소 이론으로부터 계 산되는 소스항(source term, s)을 추가한 운동량 방정 식(Eq. 1)과 연속 방정식으로 구성된다. 본 연구에서 고려한 해석 조건들에 대해 최대 끝단 마하수는 0.5를 넘지 않고, 블레이드 끝단 근방을 제외한 대부분의 유 동 영역에서는 마하수가 0.3 미만이기 때문에 비압축 성 유동의 가정과 그에 따른 해석자 적용이 타당하다 고 판단하였다.
∙ ∇
∇ ∙ ∙
∇
(1)
시간 차분에는 2차 정확도의 후방차분법, 공간 차분 에는 2차 정확도의 중앙차분법을 사용하였다. 시간 간 격은 프로펠러가 방위각(azimuth angle, ψ) 1
o만큼 회 전하는 시간으로 설정하였으며, 난류 모델은
k- SST 모델을 사용하였다. 모든 IASM 해석은 Intel Xeon E5-2640v4 2.4GHz CPU를 사용하여 병렬계산을 수 행하였다.
본 연구진은 IASM 해석자를 다양한 회전익 비행체 의 공력 해석에 적용해왔으며, 실험 및 CFD 결과와의 비교를 통해 기법의 신뢰성과 효율성을 확인하였다 [28-32]. 특히, 단일 프로펠러/로터에 대해서는 다수 의 선행 연구들을 통해 기법 개선과 정확도 검증이 이 루어졌다. Park 등[29]은 고형비(solidity, σ)가 높은 단일 프로펠러/로터에 대한 해석 정확도를 개선하였으 며, Lee 등[30]은 프로펠러의 3축 방향 힘과 모멘트 계산 기능을 추가하고, 다양한 조건의 풍동시험 및 full CFD 결과와의 비교를 통해 타당성을 확인하였다.
22..22 해해석석 형형상상 및및 격격자자
해석 대상으로 T-motor 社의 24 inch 상용 프로펠 러를 선정하였다. 형상 모델링은 3D 스캔을 통해 획득 하였으며, Gom 社의 비접촉식 광학 레이저 스캐너인 ATOS Ⅱ Triple Scanner를 사용하였다[33]. 동축 반 전 프로펠러의 형상과 회전 방향 및 상/하단 프로펠러 의 회전속도(
,
)를 Fig. 1(a)에 도시하였다. 또한 주요 설계 변수 중 하나인 축 간극은 두 프로펠러 사
이의 거리(H)를 프로펠러의 직경(D)로 나눈 무차원 변 수 H/D로 정의하였으며, 각 변수는 Fig. 1(b)에 나타 내었다.
(a) Configuration of Coaxial Propeller
(b) Geometric Parameters of Coaxial Propeller
Fig. 1 Schematic of Coaxial Propeller
r/R
C ho rd le ng th [m m ]
0 0.2 0.4 0.6 0.8 1
0 20 40 60 80
Sectional airfoil point C81 Table point
0.2R
(a) Chord Length Distribution
r/R Tw ist an gl e [
o]
0 0.2 0.4 0.6 0.8 1
0 5 10 15 20
Sectional airfoil point C81 Table point
0.2R
(b) Twist Angle Distribution
Fig. 2 Geometry of T-motor 24 inch Propeller
Figure 2는 블레이드의 섹션 별 시위 길이와 비틀림
각 분포를 보여준다. 허브에 가까워질수록 익형 형상
이 명확하게 정의되지 않고 공력 성능에 미치는 영향 또한 미미하므로 root-cut 지점을 0.2R로 선정하고 반영하였다. 또한 익형 공력 성능 테이블을 구축하기 위해 블레이드 섹션 별 코드 길이와 두께 변화 경향을 고려하여 총 5개의 섹션을 선정하였다. 각 섹션 익형 에 대해서 X-FOIL를 이용하여 레이놀즈수에 따른 공 력 계수를 획득하여 공력 테이블을 생성하였다.
IASM은 실제 블레이드 격자를 생성하지 않기 때문 에, full CFD 대비 전처리 시간과 격자 수, 해석 소요 시간 절감 측면에서 장점을 갖는다. 상/하단 프로펠러 가 위치할 영역의 범위를 고려하여 균일한 높이를 갖 는 정렬된 형태의 격자를 생성함으로써, 하나의 격자 계로 다양한 축 간극에 대한 해석을 수행 가능하도록 하였다. Figure 3(a)는 상/하단 프로펠러가 위치하는 영역의 범위와 이 영역에 대해 생성한 원통형 격자계 를 도시하였다. 비정상 후류를 적절하게 모사하기 위 해 프로펠러 근방 영역까지 정렬 형태의 격자로 구성 하였다. 전체 해석 영역은 직경이 프로펠러 직경의 16 배이고, 축 방향으로는 Fig. 3(a)의 영역으로부터 상류 와 하류 방향으로 각각 직경의 8배, 16배 떨어진 원통 형으로 설정하였다(Fig. 3(b)). 혼합 격자계로 구성한 전체 격자의 총 공간 격자수는 약 600만개이다.
(a) Propeller Region (b) Domain Boundary
Fig. 3 Computational Domain and Grid
22..33 해해석석 조조건건
동축 반전 프로펠러 해석에 앞서 해석기법과 적용된 익형 공력 테이블의 신뢰성을 확인하기 위해 단일 프 로펠러 해석을 우선적으로 수행하였다. 검증 데이터로 T-motor 社에서 제공하는 성능 데이터와 full CFD
해석 결과를 사용하였으며, 2500rpm부터 6000rpm 까지의 범위를 500rpm 간격으로 해석하였다.
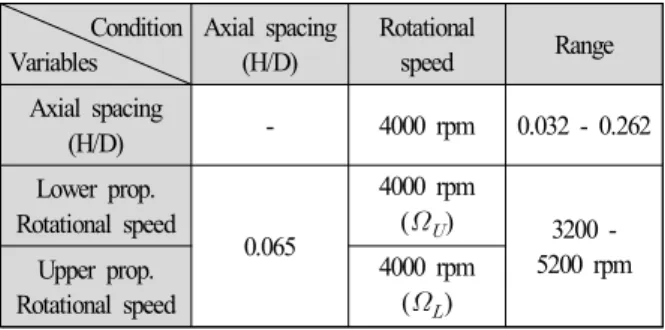
동축 반전 프로펠러 해석의 경우, 축 간극과 회전속 도를 해석 변수로 선정하였으며, 해석 조건을 Table 1 에 나타내었다. 축 간극에 따른 성능 변화를 확인하기 위해 회전속도를 4000rpm으로 고정하고, 0.032에서 부터 0.262까지 총 6가지의 간극을 선정하였다. 이어 서 상/하단 프로펠러의 회전속도를 각기 달리하여 성 능 변화를 확인하고자 하였으며, 축 간극은 0.065로 고정하였다. 먼저 상단 프로펠러를 4000rpm으로 고정 하고 하단 프로펠러를 3200rpm부터 5200rpm까지 400rpm 간격으로 해석하였다. 반대로 하단 프로펠러 를 4000rpm으로 고정하고 상단 프로펠러의 회전속도 변화에 따른 공력 성능 변화를 확인하였다.
Condition
Variables Axial spacing
(H/D) Rotational
speed Range Axial spacing
(H/D) - 4000 rpm 0.032 - 0.262 Lower prop.
Rotational speed
0.065
4000 rpm
(
) 3200 - 5200 rpm Upper prop.
Rotational speed
4000 rpm (
)
Table 1 Operating Condition of Coaxial Propeller
22..44 FFuullll CCFFDD 해해석석
IASM의 시간 효율성과 신뢰성을 비교, 평가하기 위 해 상용 유동 해석자인 ANSYS Fluent를 사용하여 full CFD 해석을 함께 수행하였다. 단일 프로펠러의 경우 다중 참조 프레임(MRF; Multiple Reference Frame)을 적용한 정상 유동, 동축 반전 프로펠러의 경우는 슬라이딩 격자 기법(SMM; Sliding Mesh Model)을 사용한 비정상(unsteady) 유동을 고려하여 3차원 Navier-Stokes 방정식을 해석하였다.
PBCS(Pressure-based coupled solver) 해석자를
사용하였으며, 난류 모델은 압축성(compressibility)
옵션을 적용한
k- SST 모델을 사용하였다. 플럭스
재구성을 위한 gradient 계산 방법으로는 최소자승법
을 선택하였으며, 공간차분에는 2차 풍상차분법을 적
용하였다. 모든 full CFD 해석은 Intel Xeon
E5-2690v3 2.6GHz CPU를 사용하여 병렬계산을 수
행하였다.
33.. 해해석석 결결과과 및및 분분석석
33..11 단단일일 프프로로펠펠러러
회전속도에 따른 단일 프로펠러 해석 결과를 Fig. 4 에 나타내었다. T-motor 社에서 제공하는 성능 데이 터와 본 연구진이 보유한 BEMT[21] 및 ADM[30-32] 기법의 결과를 함께 비교하였다. 고려한 모든 기법들이 제작사가 제공하고 있는 성능지표와 유 사한 추력-토크 선도를 도출함을 볼 수 있으며, T-motor 社 제공 성능은 BEMT와 ADM의 해석 결과 와 거의 일치하는 것으로 나타난다. Full CFD와 IASM 결과는 동일한 추력 조건에서 상대적으로 큰 토 크를 나타내며, IASM이 full CFD 결과보다도 토크를 소폭 과예측 하는 것을 알 수 있다. 모멘텀 소스만으 로 블레이드 효과를 모사하여 신속하게 비정상 유동 해석을 수행하는 기법의 장점을 감안했을 때, Full CFD와 비교하여 IASM이 적절한 성능 해석 결과를 제 공하는 것으로 판단할 수 있다.
Torque [Nm]
Th ru st [N ]
0 0.5 1 1.5 2 2.5 3 3.5
0 20 40 60 80 100 120
T-motor spec.
Full CFD(MRF) BEMT[21]
ADM[30-32]
IASM
Fig. 4 Performance Curve of Single Propeller
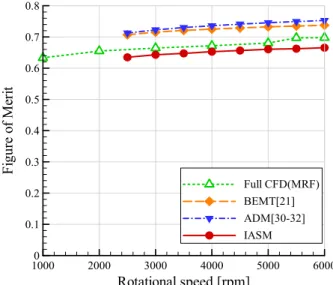
제자리 비행 효율(FM; figure of merit)을 계산하여 Fig. 5에 나타내었다. 제자리 비행 효율은 제자리 비행 에 요구되는 이상 동력(ideal power)과 실제 동력 (actual power)의 비로 나타내며 Eq. 2와 같다.
(2)
회전속도에 따른 제자리 비행 효율의 경향성은 모든 기법들의 결과가 유사하게 나타나며, full CFD 결과 대비 IASM은 5% 이내 수준의 저예측, BEMT와 ADM 은 약 8% 수준의 과예측 결과를 나타내었다. IASM은 full CFD 대비 5% 이내의 성능 예측 정확도를 보이 며, 준 정상상태 가정에 기반한 BEMT 및 ADM 보다 는 높은 정확도를 제공함을 확인할 수 있다.
Rotational speed [rpm]
Fi gu re of M er it
1000 0 2000 3000 4000 5000 6000
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Full CFD(MRF) BEMT[21]
ADM[30-32]
IASM
Fig. 5 Figure of Merit for Single Propeller
33..22 동동축축 반반전전 프프로로펠펠러러 -- 축축 간간극극 영영향향
축 간극에 대한 다수의 선행 연구들[12-15,19,20]
에서는 주로 0.1 이상의 값들을 고려하였으며, 제한된 수의 케이스들에 대해서만 비교가 이루어졌다. 축 간 극이 작을수록 기체의 소형화 및 허브 항력 저감 등을 기대할 수 있어 0.1 이하의 축 간극에 대한 연구 필요 성이 증가하고 있다.
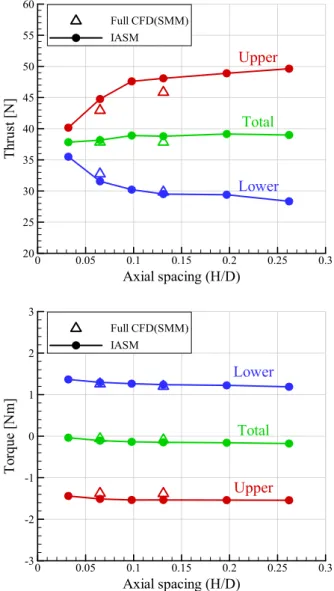
여러 축 간극에 대한 추력 및 토크 결과를 Fig. 6에
나타내었다. 축 간극에 따른 성능 변화는 함께 나타낸
full CFD 결과와 유사한 경향성을 보이며, 상/하단 프
로펠러의 평균 추력과 토크는 각각 평균 4%와 7% 미
만 수준의 오차를 나타내었다. 축 간극이 증가할수록
상단 프로펠러의 추력은 증가하고, 하단 프로펠러의
추력은 감소하며(Fig. 6(a)), 토크의 경우는 추력 대비 변화 수준이 미미함을 알 수 있다(Fig. 6(b)). 일정 축 간극 이후부터는 전체 추력과 토크가 일정 수준의 값 에 근접해 가는 것을 볼 수 있고, 이는 축 간극이 커 질수록 두 프로펠러 간 상호 간섭이 감소하기 때문으 로 분석된다.
Axial spacing (H/D)
Th ru st [N ]
0 0.05 0.1 0.15 0.2 0.25 0.3
20 25 30 35 40 45 50 55 60
Full CFD(SMM) IASM
Upper Total Lower
Axial spacing (H/D)
To rq ue [N m ]
0 0.05 0.1 0.15 0.2 0.25 0.3
-3 -2 -1 0 1 2 3
Full CFD(SMM) IASM
Upper Total Lower
Fig. 6 Performance of Counter-rotating Propeller
with respect to Axial Spacing상세 분석을 위해 성능 계수의 시간 이력을 비교하 였다. Figure 7에는 1회전 동안 방위각에 따른 추력 계수의 변화를 상/하단 프로펠러에 대해 각각 제시하 였다. 이 때, 두 프로펠러가 동일한 위상각에 위치한 상태를 방위각 0°로 정의한다. 1회전 동안 상/하단 프
로펠러 모두 총 4번의 주기적인 추력 계수 변화가 일 어나며, 축 간극이 작을수록 진폭이 증가함을 볼 수 있다. 축 간극이 증가함에 따라 상단 프로펠러 추력 계수의 최저점이 높아지며(Fig. 7(a)), 하단 프로펠러 의 경우 최고점이 낮아지는 경향을 보인다(Fig. 7(b)).
Azimuth angle [o]
C T, up pe r
0 60 120 180 240 300 360
0.002 0.004 0.006 0.008 0.01 0.012 0.014
H/D = 0.032 H/D = 0.065 H/D = 0.098 H/D = 0.131 H/D = 0.197 H/D = 0.262
(a) Upper Propeller
Azimuth angle [o]
C T, lo w er
0 60 120 180 240 300 360
0.002 0.004 0.006 0.008 0.01 0.012 0.014
H/D = 0.032 H/D = 0.065 H/D = 0.098 H/D = 0.131 H/D = 0.197 H/D = 0.262
(b) Lower Propeller
Fig. 7 Time History of Thrust Coefficient for
Various Axial SpacingsLakshminarayan 등[16-17]은 상/하단의 블레이드
가 서로 가까워짐에 따라 하중 효과(loading effect)로
인해 두 블레이드의 순환강도가 중첩되어 두 블레이드
모두에 대하여 일시적으로 양력이 증가하는 올려흐름
(upwash) 효과가 나타나며, 다시 블레이드가 멀어지면 서 양력이 감소하는 내리흐름(downwash) 효과가 나 타난다고 설명하였다. 따라서 상/하단 블레이드가 가까 워지다가 멀어지는 상태로 바뀌는 구간, 즉 두 블레이 드가 가장 근접하게 되는 상태 전후(방위각 70-110°) 로 급격한 추력 변화가 나타나며, 축 간극이 증가할수 록 이러한 하중 효과가 감소되어 변화 폭이 작아지는 것으로 분석된다.
(a) H/D = 0.032(20mm)
(b) H/D = 0.065(40mm)
(c) H/D = 0.131(80mm)
(d) H/D = 0.262(160mm)
Fig. 8 Sectional Thrust of Upper(left) and
Lower(right) Propeller at Several Axial Spacings4개의 축 간극(H/D=0.032, 0.065, 0.131, 0.262)에 대하여, 하나의 블레이드가 1회전 하는 동안 디스크 면에 유발하는 국소 추력 분포를 Fig. 8에 도시하였다.
축 간극이 작을 때, 블레이드 간 상호 간섭 및 하중 효과로 인해 상/하단 프로펠러 모두 방위각 방향을 따 라 4/rev의 주기적 추력 변화가 명확하게 나타남을 확 인할 수 있다. 축 간극 증가에 따라 추력 분포가 방위 각 방향으로 균일한 형태로 변화됨을 확인할 수 있다.
몇 가지 축 간극 케이스들에 대하여 iso-Q 면으로 유동장을 가시화하여 Fig. 9에 나타내었다. 축 간극이 작을수록 상호 간섭에 의해 프로펠러 근방 영역에서 불규칙적이고 복잡한 유동장이 형성되며, 축 간극 증 가에따라 규칙적인 유동 구조가 형성됨을 확인할 수 있다.
33..33 동동축축 반반전전 프프로로펠펠러러 –– 회회전전속속도도 영영향향
상/하단 프로펠러의 회전속도가 동일한 경우, 상호
간섭으로 인하여 두 프로펠러의 토크 차이가 발생하 고, 그로 인해 토크 불균형(Torque-unbalanced)이 나 타난다(Fig. 6(b)). 동축 반전 로터 방식의 헬리콥터에 서는 토크 상쇄를 위해 하단 로터의 콜렉티브 피치각 을 높여 토크 평형 상태를 확보하며, 관련 선행연구들 에서도 중요성이 강조되어 왔다[12,15,17]. 하지만 본 연구에서 고려하는 프로펠러는 블레이드 피치각 제어 가 불가능하므로, 필요한 경우 상/하단 프로펠러의 회 전속도를 달리 운용함으로써 토크 평형 조건을 달성할 수 있다. 다수의 동축 반전 프로펠러들을 사용하는 비 행체의 경우, 일반적으로 프로펠러들을 전후좌우 대칭 으로 배치함으로써 전기체의 토크 균형을 확보한다.
하지만 동축 반전 프로펠러가 단독으로 사용되거나,
기체 중심선 상에 배치되거나 혹은 비대칭적 분포를
갖는 비행체를 고려해야 하는 경우, 유상 하중이 큰
운용조건에서 토크 불균형이 전기체의 안정성에 영향
을 줄 수 있으므로 토크 평형의 고려가 요구될 수 있
다. 본 연구에서는 두 프로펠러가 서로 다른 회전속도
로 작동하는 조건에 대하여 추력과 토크의 변화 경향
과 특성을 확인하고 토크 평형 조건을 식별하였다.
(a) H/D = 0.065 (40mm) (b) H/D = 0.131 (80mm) (c) H/D = 0.262 (160mm)
Fig. 9 Q-criterion of Counter-rotating Propeller at Several Axial Spacings
Rotational speed (W
L) [rpm]
Th ru st [N ]
3200 0 3600 4000 4400 4800 5200
15 30 45 60 75 90
Full CFD(SMM) IASM
Low er Upper
(4000rpm)
Rotational speed (W
L) [rpm]
To rq ue [N m ]
3200 3600 4000 4400 4800 5200
-4 -2 0 2 4
Full CFD(SMM)
IASM Lower
Upper (4000rpm)
Rotational speed (W
U) [rpm]
Th ru st [N ]
3200 0 3600 4000 4400 4800 5200
15 30 45 60 75 90
Full CFD(SMM) IASM
Lower (4000rpm)
Upp er
Rotational speed (W
U) [rpm]
To rq ue [N m ]
3200 3600 4000 4400 4800 5200
-4 -2 0 2 4
Full CFD(SMM) IASM
Lower (4000rpm)
Upper
(a) Fixed Rotational Speed for Upper Propeller (b) Fixed Rotational Speed for Lower Propeller
Fig. 10 Performance of Counter-rotating Propeller at Various Rotational Speed
상단 프로펠러의 회전속도(
)를 4000rpm으로 고 정하고, 하단 프로펠러의 회전속도(
)에 따른 결과를 Fig. 10(a)에 나타내었다. 회전속도만의 영향을 평가하 기 위해 축 간극은 0.065로 고정하였다.
증가에 따라 추력과 토크가 증가하며,
가 일정함에도 상단 프로펠러의 추력과 토크의 크기는 모두 감소하는 경향 을 나타낸다. 이는
이 증가할수록 상단 프로펠러에 더 강한 흡입류(suction flow)가 유도되고, 이로 인해 상단 프로펠러의 깃 요소 관점에서 유효받음각이 감소 하기 때문으로 분석된다. 이러한 효과는 수직방향(회전 축 방향)의 속도 분포를 나타낸 Fig. 11을 통해서도 확인할 수 있다.
가 높을 때 더 큰 내리흐름이 발생 하고 있으며, 이 영향이 상단 프로펠러의 상류에서부 터 추가적인 유입류와 같이 작용하고 있음을 볼 수 있 다.
(a) 3200rpm (b) 4800rpm
Fig. 11 Contours of Axial Velocity for Two
Rotational Speeds of Lower Propeller
반대로
를 4000rpm으로 고정하고, 다양한
조 건에 대한 결과를 Fig. 10(b)에 나타내었다. 앞서
고정상태(Fig. 10(a))일 때와 유사하게, 회전속도 증가 에 따라 상단 프로펠러는 추력과 토크가 증가하며 고 정된
에도 불구하고 하단 프로펠러의 추력과 토크 는 감소 경향을 보인다. 이는
가 증가할수록 후류 유동이 더 강한 내리흐름(downwash)을 유발함에 따 라 하단 프로펠러 블레이드의 깃요소 관점에서 유효받 음각이 감소하기 때문으로 분석된다. 마찬가지로 두 가지 회전속도 조건에 대해 수직방향의 속도 분포를 나타낸 Fig. 12를 통해 이러한 변화를 명확하게 확인 할 수 있다.
(a) 3200 rpm (b) 4800 rpm
Fig. 12 Contours of Axial Velocity for Two
Rotational Speeds of Upper Propeller
의 변화에 따라 고정된 회전속도의 상단 프로펠 러의 추력과 토크는 각각 약 12%, 4% 감소하였고, 추 력에 비해 토크의 변화는 미미하다(Fig. 10(a)). 반면
의 변화에 따른 고정된 회전속도의 하단 프로펠러 추력과 토크는 각각 약 47%, 25% 감소하는 것으로 나타나(Fig. 10(b)), 상단 프로펠러 비해 하단 프로펠 러가 상대 프로펠러의 회전속도 변화에 대해 더 큰 민 감도를 가짐을 알 수 있다. 하단 프로펠러는 상단 프 로펠러의 강한 후류 유동에 직접적인 영향을 받기 때 문에 큰 성능 변화가 발생하는 것으로 분석된다.
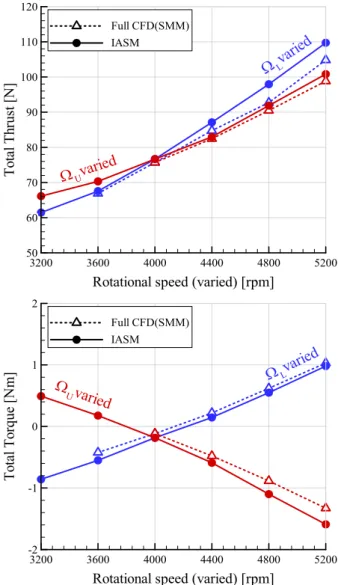
한 쪽 프로펠러의 회전속도 변화에 따른 동축 프로 펠러의 전체 성능을 Fig. 13에 나타내었다. 가로축은 변화하는 프로펠러의 회전속도를 나타낸다. 회전속도 가 증가함에 따라 해당 프로펠러의 추력이 증가하기 때문에, 회전속도가 고정된 쪽의 추력이 감소함에도 불구하고(Fig. 10) 추력의 합인 전체 추력은 증가한다 (Fig. 13(a)). 두 프로펠러의 평균 회전속도가 증가하 기 때문에 전체 추력도 증가할 것으로 쉽게 예상할 수 있다. 동일한 평균 회전속도 조건을 고려하면, 상단 대 비 하단 프로펠러의 회전속도가 빠를수록 더 큰 전체 추력을 나타냄을 알 수 있다.
전체 토크를 나타낸 Fig. 13(b)로부터,
고정 케
이스의 경우,
가 소폭 높아지면(약 4220rpm) 전체
토크가 0이 되어 토크 평형 상태에 이르게 됨을 볼 수
있다. 반면
고정 케이스에서는
가 소폭 낮아져
야(약 3800rpm) 토크 평형 상태에 도달함을 확인할
수 있다. 따라서 토크 평형 상태는 하단 프로펠러의
회전속도가 상대적으로 빠른 조건에서 발생함을 알 수
있다. 또한 결과들로부터 동축 반전 프로펠러는 특정 추력을 발생시키면서도 토크 평형 상태를 만족하는 상 /하단 프로펠러의 회전속도 조합이 존재한다고 판단할 수 있다. Figure 10과 13의 결과로부터, 서로 다른 회 전속도를 갖는 동축 반전 프로펠러의 성능 해석 측면 에서도 IASM이 full CFD에 준하는 수준의 우수한 예 측 신뢰성을 제공함을 확인할 수 있다.
Rotational speed (varied) [rpm]
To ta lT or qu e [N m ]
3200 3600 4000 4400 4800 5200
-2 -1 0 1 2
Full CFD(SMM) IASM
W
Lvarie d W
Uvaried
Fig. 13 Overall Performance of Counter-rotating
Propeller with Variation of Rotational Speed of Only One Propeller33..44 제제자자리리 비비행행 효효율율
결과들로부터 동축 반전 프로펠러의 제자리 비행 효율을 계산하여 단일 프로펠러와 비교하였다. 단일 프로펠러와 상/하단의 개별 프로펠러에 대해서는 Eq.
2, 동축 반전 프로펠러 전체에 대해서는 Eq. 3을 사용 하여 제자리 비행 효율을 계산하였다[34].
(3)
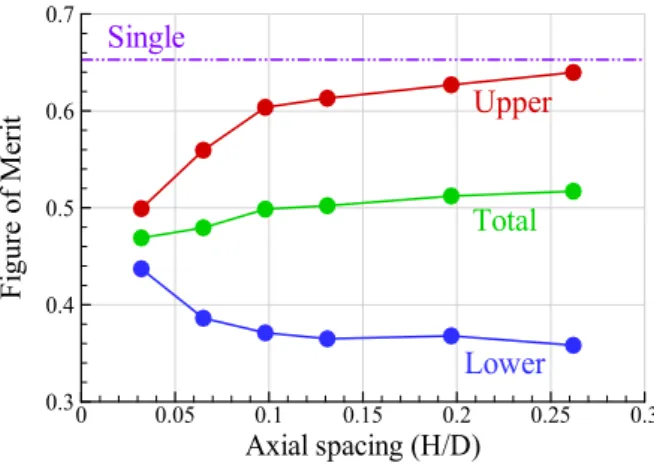
Figure 14(a)에는 축 간극에 따른 결과를 나타내었 다. 제자리 비행 효율은 추력(Fig. 6(a))과 유사한 변 화 경향을 보이며, 이는 추력 대비 축 간극에 따른 토 크 변화가 상대적으로 미미하기 때문으로 분석되었다.
함께 나타낸 단일 프로펠러의 효율과 비교하면, 동축 반전 프로펠러는 상당 수준 낮은 효율을 나타냄을 확 인할 수 있다. 이는 상/하단 프로펠러 간 상호 간섭이 발생하면 각 프로펠러의 영향이 서로의 효율을 저하시 키는 방향으로 작용하여 전체 효율 측면에서는 효율 저하가 가중되는 것과 같은 효과가 발생하기 때문으로 분석할 수 있다. 특히 하단 프로펠러의 경우, 상단 프 로펠러로부터 발생하는 후류의 내리흐름으로 인해 제 자리 비행 효율이 단일 프로펠러 대비 45% 수준까지 도 저하되는 것으로 나타난다. 이와 반대로, 상단 프로 펠러의 경우 축 간극이 증가함에 따라 상호 간섭이 감 소하여 단일 프로펠러의 효율에 근접해 감을 확인할 수 있다.
를 고정한 케이스의 결과를 Fig. 14(b)에 나타내 었다.
이 증가할수록 상단 프로펠러의 효율은 감소 하고, 하단의 효율은 회복됨을 알 수 있다. 상단 프로 펠러의 효율 감소는 Fig. 10(a)와 11을 통해 논의하였 듯이 하단 프로펠러가 유도하는 유입류 증가에 의한 상단 프로펠러의 추력 저하 때문으로 분석된다. 상/하 단 프로펠러의 효율 역전은 5200rpm 근방에서 발생 하는 것으로 예측되며, 회전속도 증가에 따라 전체 효 율은 증가하는 경향을 보여준다. 축 간극에 따른 결과 (Fig. 14(a))에서도 확인하였듯이 단일 프로펠러 결과 와 비교하면 전체 효율은 상당히 낮은 값을 보인다.
Rotational speed (varied) [rpm]
To ta lT hr us t[ N ]
3200 3600 4000 4400 4800 5200
50 60 70 80 90 100 110 120
Full CFD(SMM) IASM
W
Lvar ied
W
Uvaried
Fig. 14(c)는
를 고정한 케이스에 대한 결과를 보 여준다.
가 높을수록, 상단 프로펠러의 효율은 증가 하고 하단 프로펠러의 효율은 저하됨을 확인할 수 있 다. 상/하단 프로펠러의 효율 역전은 상단 프로펠러의 회전속도 약 3200rpm 이하에서 발생할 것으로 예상 할 수 있다. 앞서 상단 회전속도 고정 케이스와는 반 대로 전체 효율은 회전속도에 따라 감소하는 것으로 나타난다. 이는 앞서 논의한 바 있듯이 상단 프로펠러 의 강한 후류 유동이 하단 프로펠러의 성능 저하에 미 치는 영향이 크기 때문에, 회전속도 증가에 의해 발생 하는 하단 프로펠러의 효율 저하가 더 크게 나타나기 때문으로 분석된다.
33..55 공공력력 성성능능 예예측측 인인자자
프로펠러/로터의 신속한 공력 성능 예측은 초기 설 계 시 설계 영역 탐색의 효율성을 크게 높일 수 있다.
앞서 논의한 바 있듯이 동축 반전 프로펠러의 경우 단 일 프로펠러 대비 시험 및 수치해석에 있어 측정 시스 템의 복잡도가 증가하고 공력 성능 획득의 신속성이 제한된다. 반면 단일 프로펠러에 대한 성능은 비교적 간단한 방법으로도 성능 획득이 용이할 뿐만 아니라, 상용 프로펠러의 경우 제조사가 단일 프로펠러의 기본 성능을 제공하는 경우도 많다. 이러한 관점에서, 단일 프로펠러 성능으로부터 동축 반전 프로펠러의 전체 성 능을 빠르게 추정할 수 있다면, 해당 추진 방식을 사 용하는 비행체의 설계와 성능 해석 시 매우 유용할 것 으로 판단된다.
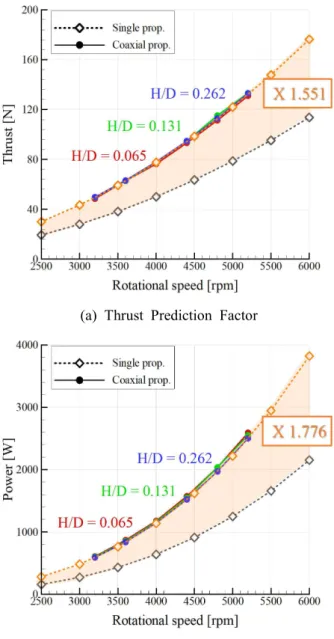
IASM 해석 결과들을 활용하여, 단일 프로펠러 성 능으로부터 동축 반전 프로펠러 성능을 추정할 수 있 는 예측 인자를 도출하고자 하였다. 신뢰도 제고를 위 해, 3개의 축 간극(H/D=0.065, 0.131, 0.262)에 대하 여 3200rpm부터 5200rpm까지의 회전속도 범위를 추 가로 해석하였다. 회전속도에 따른 해석 결과들에 대 해 최소제곱법을 적용하여 성능 예측 인자를 추력과 동력에 대해 각각 산출하였으며, 그 결과를 Table 2에 제시하였다. 획득된 성능 예측 인자들은 축 간극에 따 른 의존성이 미미한 것으로 나타났으며, 세 가지 축 간극에 대한 평균값을 고려하여 추력 예측 인자는 1.551, 동력 예측 인자는 1.776로 도출하였다.
Axial spacing (H/D)
Fi gu re of M er it
0 0.05 0.1 0.15 0.2 0.25 0.3
0.3 0.4 0.5 0.6
0.7 Single
Upper
Lower Total
(a) Fixed Rotational Speed of Both Propeller
Rotational speed (W
L) [rpm]
Fi gu re of M er it
3200 3600 4000 4400 4800 5200
0.2 0.3 0.4 0.5 0.6
0.7 Single (4000rpm)
Upper (4000rpm)
Low er Total
(b) Fixed Rotational Speed for Upper Propeller
Rotational speed (W
U) [rpm]
Fi gu re of M er it
3200 3600 4000 4400 4800 5200
0.2 0.3 0.4 0.5 0.6
0.7 Single (4000rpm)
Upper Lower (4000rpm)
Total
(c) Fixed Rotational Speed for Lower Propeller
Fig. 14 Figure of Merit of Coaxial Propeller
H/D
Factor 0.065 0.131 0.262 Average Thrust 1.533 1.563 1.556 1.551 Power 1.803 1.782 1.744 1.776
Table 2 Performance Prediction Factor
단일 프로펠러의 성능에 예측 인자를 곱한 결과를 동축 반전 프로펠러 해석 결과와 함께 비교하여 Fig.
15에 나타내었다. 전체 회전속도 범위에서 추력과 동 력 모두 예측 인자를 활용한 예측이 우수한 일치성을 보임을 확인할 수 있다.
(a) Thrust Prediction Factor
(b) Power Prediction Factor
Fig. 15 Total Performance of Counter-rotating
Propeller with respect to Rotational Speed도출한 성능 예측 인자는 본 연구에서 고려하는 T-motor 社의 24 inch 프로펠러에 해당한다. 예측 인 자의 타당성을 평가하기 위해 선행연구들[12,13,19]을
통해 획득된 단일/동축 반전 프로펠러/로터의 결과들 을 수집하고 동일한 방법을 사용하여 성능 예측 인자 를 도출하여 Table 3에 제시하였다.
Radius Thrust Power Present 0.3048 m 1.551 1.776 Yoon 등[12] 3.81 m 1.647 -
Lei 등[13] 0.2 m 1.603 - Sim 등[19] 0.3302 m 1.621 1.884
Table 3 Comparison of Prediction Factor
선행 연구들과 본 연구의 결과들로부터 도출된 인자 들이 일정 범위 내에 분포하고 있다고 판단할 수 있 다. 예측 인자는 프로펠러 형상을 포함하여 여러가지 요인들에 의해 달라질 것으로 예상할 수 있다. 다양한 직경의 동축 반전 프로펠러/로터에 대해 추력 예측 인 자는 약 1.55 ~ 1.65의 범위에 분포하며, 대체적으로 는 직경이 클수록 예측 인자의 값도 증가하는 경향을 볼 수 있다. 추력 및 동력 성능 예측 인자는 초기 설 계 단계에서 동축 반전 프로펠러의 공력 성능을 신속 하게 예측하는데 유용할 것으로 예상된다.
추가적으로 IASM의 해석 시간을 full CFD와 비교하 여 Table 4에 나타내었다. 해석 케이스는 프로펠러 회 전속도가 4000rpm이고 축 간극이 0.065인 동축 반전 프로펠러로 선정하였다. 해석에 사용된 CPU 코어 수 와 코어 당 클럭수, 프로펠러 1회전 해석에 소요되는 계산 시간을 곱하여 두 기법의 대략적인 연산량을 추 정하고, 시간 효율성을 비교/평가하였다. IASM이 full CFD 대비 약 31배 정도 우수한 시간 효율성을 가질 수 있음을 확인하였다(Eq. 4). 따라서, 다양한 프로펠 러/로터에 대해 본 연구와 같은 해석을 수행하여 성능 예측 인자 및 관계식들을 도출하거나 설계, 개발 단계 에서 분산추진 비행체의 공력 성능 해석과 분석에 매 우 유용하게 활용 가능한 기법으로 기대할 수 있다.
(4)
Sliding Mesh Model
(Fluent) IASM (OpenFOAM) CPU Intel Xeon E5-2690v3
2.6GHz, 48 cores Intel Xeon E5-2640v4 2.4GHz, 20 cores No. of
grids 12 M 6 M
Computing
time 12 h/rev 1 h/rev Table 4 Comparison of Computational Resources
44.. 결결 론론
본 연구에서는 시간 효율적 해석기법인 IASM을 활 용하여 다양한 조건에서 제자리 비행하는 동축 반전 프로펠러의 공력 해석을 수행하고, 결과로부터 성능 및 유동장 특성 분석과 함께 기법의 실용성을 평가하 였다. 축 간극이 클수록 상/하단 프로펠러의 상호 간섭 이 감소하여 상단 프로펠러의 공력 성능은 단일 프로 펠러와 유사한 수준으로 회복되지만, 하단 프로펠러는 상단 프로펠러의 영향으로 인해 공력 성능이 감소하게 됨을 확인하였다. 한 쪽 프로펠러의 회전속도를 고정 하고 다른 한 쪽의 회전속도를 변화시킬 경우, 회전속 도 증가에 따라 고정된 회전속도를 가지는 프로펠러의 공력 성능이 저하되었다. 동일한 평균 회전속도 조건 을 고려할 경우, 하단 프로펠러의 회전속도가 클수록 더 큰 전체 추력이 발생함을 확인하였다. 단독 프로펠 러의 성능으로부터 동축 반전 프로펠러의 성능을 예측 하기 위한 인자를 평가하였으며, 정해진 프로펠러 형 상에 대해서는 축 간극이나 회전속도에 관계없이 예측 인자적용의 타당성을 확인하였다. 또한 선행 연구 결 과들을 활용하여 다양한 형상과 크기의 프로펠러에 대 해서도 예측 인자가 일정 범위 내에 분포할 것으로 예 상 가능하였다.
IASM 결과가 full CFD 결과와 전반적으로 잘 일치 하였으며, 이로부터 공학적 활용 관점에서 동축 반전 프로펠러 해석에도 IASM이 신뢰성과 타당성을 가짐을 확인하였다. 해석 소요시간 측면에서는 full CFD 대비 30배 이상 효율적인 것으로 나타나, IASM이 성능 예 측 인자 도출이나, 파라미터 연구 및 분산추진 비행체 의 신속 공력 해석과 분석에 매우 유용하게 활용 가능 한 기법임을 확인할 수 있었다.
향후 동축 반전 프로펠러 대비 소음이 적게 발생하 는 동축 동회전 프로펠러에 대한 검증과 응용 연구를 수행할 예정이며, 사이각(azimuthal spacing)과 같은 추가적인 설계 파라미터에 대한 공력 성능 분석을 진 행할 예정이다.
후 후 기기
이 논문은 부산대학교 기본연구지원사업(2년)에 의하 여 연구되었음
RReeffeerreenncceess