가상주행과 실차주행의 운전자 주행행태 차이에 관한 연구
A Study on the Compensation of the Difference of Driving Behavior between the Driving Vehicle and Driving Simulator
박`진`호 Park, Jinho 서울시립대학교 교통공학과 석사 (E-mail : [email protected]) 임`준`범 Lim, Joonbeom 서울시립대학교 교통공학과 박사 (E-mail : [email protected]) 주`성`갑 Joo, Sungkab 서울시립대학교 교통공학과 석사 (E-mail : [email protected])
이`수`범 Lee, Soobeom 정회원·서울시립대학교 교통공학과 교수·교신저자 (E-mail : [email protected])
1. 서론
1.1. 연구배경 및 목적
교통사고는 차량, 도로, 사람(운전자) 3가지 요인이
단독 또는 복합적으로 작용하여 발생한다. 그러므로 자 동차 업계는 안전성능을 계속적으로 향상시키고 있으 며, 도로관리자는 사고를 줄일 수 있는 시설물이나 ITS
Int. J. Highw. Eng. Vol. 17 No. 2 : 107-122 APRIL 2015 http://dx.doi.org/10.7855/IJHE.2015.17.2.107
ABSTRACT
PURPOSES :The use of virtual driving tests to determine actual road driving behavior is increasing. However, the results indicate a gap between real and virtual driving under same road conditions road based on ergonomic factors, such as anxiety and speed. In the future, the use of virtual driving tests is expected to increase. For this reason, the purpose of this study is to analyze the gap between real and virtual driving on same road conditions and to use a calibration formula to allow for higher reliability of virtual driving tests.
METHODS :An intelligent driving recorder was used to capture real driving. A driving simulator was used to record virtual driving.
Additionally, a virtual driving map was made with the UC-Win/Road software. We gathered data including geometric structure information, driving information, driver information, and road operation information for real driving and virtual driving on the same road conditions. In this study we investigated a range of gaps, driving speeds, and lateral positions, and introduced a calibration formula to the virtual record to achieve the same record as the real driving situation by applying the effects of the main causes of discrepancy between the two (driving speed and lateral position) using a linear regression model.
RESULTS :In the virtual driving test, driving speed and lateral position were determined to be higher and bigger than in the real Driving test, respectively. Additionally, the virtual driving test reduces the concentration, anxiety, and reality when compared to the real driving test. The formula includes four variables to produce the calibration: tangent driving speed, curve driving speed, tangent lateral position, and curve lateral position. However, the tangent lateral position was excluded because it was not statistically significant .
CONCLUSIONS :The results of analyzing the formula from MPB (mean prediction bias), MAD (mean absolute deviation) is after applying the formula to the virtual driving test, similar to the real driving test so that the formula works. Because this study was conducted on a national, two-way road, the road speed limit was 80 km/h, and the lane width was 3.0-3.5 m. It works in the same condition road restrictively.
Keywords
geometric structure, driving simulator, lateral position, linear regression model, driving speed
Corresponding Author : Lee, Soobeom, Professor
Department of Transportation Engineering, University of Seoul 163, Seoulsiripdae-ro, Dongdaemun-gu, Seoul 130-743, Korea Tel: +82.2.6490.5662 Fax: +82.2.6490.2819
E-mail: [email protected]
International Journal of Highway Engineering http://www.ksre.or.kr/
ISSN 1738-7159 (print) ISSN 2287-3678 (Online)
Received Jun. 17. 2014 Revised Jun. 17. 2014 Accepted Feb. 24. 2015
등을 지속적으로 연구하고 예산을 투입하고 있다. 운전 자 요인은 음주, 과속, 졸음 등이 많은데, 단속, 교육, 홍보 등의 장기적 관점에서 접근하고 있다. 그러나 도로 와 운전자가 복합적으로 작용하여 발생한 사고가 25%
정도 되는데(Rumar, 1985), 이에 대한 연구는 아직 미 미한 실정이다. 그 이유는 도로와 운전자의 복합적인 요 인을 연구하기 위해서는 도로와 운전자, 교통사고 데이 터가 많이 축적되어 있어야 분석이 가능하기 때문이다.
그러나 운전자의 주행행태에 관한 데이터는 축적하기 어려운게 현실이며, 이를 보완하기 위해서 Driving Simulator 실험이 이용되고 있다. 이때 Driving Simulator 실험은 운전자의 제어, 조치, 도로의 안전환 경 등 주행 관련 능력을 조사할 때 유용하게 활용될 수 있으므로(M.L. Jackson, 2013) 운전자의 행태를 분석 하기 위해서는 매우 안전하고 경제적인 방법이다.
Driving Simulator 및 Driving Simulator 실험 맵 구축 수준은 도로의 기하구조, 차량 동역학적 특성은 현 실과 동일하게 구현할 수 있는 수준에 도달했다. 그러나 Driving Simulator 실험 시 운전자들의 주행행태는 가 상이라는 환경적 요인과 운전자의 심리적인 이유로 실제 도로 주행과는 차이가 있게 나타난다. 즉, 운전자가 실제 도로 주행에서 나타내는 행태와 Driving Simulator 실 험에서 나타내는 행태는 기하구조가 동일하기 때문에 패 턴 등은 유사할 수 있으나, 절대적인 값은 차이가 있을 수 밖에 없다. 이러한 이유로 Driving Simulator 실험 결과는 절대적인 결과를 제시하기 보다는 상대적인 비교 를 통해서 결과를 제시하는 경우가 많다. 그러므로 향후 Driving Simulator가 다양하게 활용되기 위해서, 실차 주행과 가상주행의 차이를 보정하는 것이 필요하다.
본 연구의 목적은 실차주행 시와 Driving Simulator 주행 시 기하구조에 따른 주행속도, 차량의 횡방향 이격 거리를 분석하고, 그 차이를 보정할 수 있는 모형식을 제시하는 것이다.
1.2. 연구내용 및 방법 1.2.1. 연구의 범위
Driving Simulator 실험과 실제 도로주행 실험을 통해 주행속도, 차량의 횡방향 이격거리, 기하구조 정보 를 취득한다. 기하구조별 주행속도, 차량의 횡방향 이격 거리 차이를 분석하여 해당 차이를 보정할 수 있는 모형 식을 제시한다.
기하구조 범위는 충청북도 지역 일반국도 3개(3호선, 19호선, 24호선) 노선 총 46.6km(34.6km`:`분석용,
12km`:`모형검증용) 구간의 도로이며, 곡선부 곡선반경 R=300m~1,399m, 직선부 길이 L=30m~900m의 범 위이다.
1.2.2. 연구의 수행방법
본 연구의 가장 중요한 요소는 실제 도로의 기하구조 정보 취득, 실제 도로주행 실험, 실제 도로와 동일한 기 하구조의 가상주행 도로 제작과 Driving Simulator 실험이다. 이를 위하여 도로의 기하구조 정보가 포함된 CAD파일을 이용하여 도로의 기하구조 정보를 수집하 였으며, UC-Win/Road 프로그램을 이용하여 Driving Simulator 실험 맵을 제작하고, 동일한 기하구조의 주 행기록을 비교₩분석한다. 선형회귀식을 이용해 각각의 기하구조에서 실제 도로주행속도, 실차 횡방향 이격거 리에 영향을 미치는 요인을 Driving Simulator 실험 속도에 반영하고, 실제 도로주행과 동일한 주행기록을 획득할 수 있도록 모형식을 구축하고자 한다. 선형 회귀 (linear regression)는 선형 상관관계를 가정하는 분석 이다. 선형 회귀는 구하고자 하는 목표가 예측치일 경 우, 선형 회귀를 통해 y와 x로 이루어진 집합을 만들기 위한 예측 모형을 개발한다. 개발된 모형은 차후 y가 없 는 x값이 입력되었을 때, 해당 x에 대한 y를 예측하기 위해 사용한다.
2. 문헌고찰 2.1. 기존 문헌고찰
2.1.1. 가상주행 시뮬레이터를 활용한 연구사례 Fig. 1 Process of Study
김주영(2012)은 운전부하가 운전자 뇌파로 설명될 수 있음과 도로 설계기준 운전자는 reasonable worst 환 경에서 특정 뇌파가 측정됨에 착안하여 시뮬레이터 주 행 실험과 현장 주행 실험을 통해 설계기준 운전자의 운 전부하를 뇌파 설명 파라미터인 베타파와 상대 에너지 계수 값으로 제시하였다. 해당 연구에서 제시한 설계기 준 운전자의 운전부하는 도로 설계나 도로 안전시설물 설계 및 설치 등 다양한 분야에서 운전자의 심리적인 부 담 한계를 반영한 이론적 풀이가 가능하며, 설계자의 판 단에 의하여 경험적으로 설계요소가 정해지고 설계자별
₩사례별₩설계대상별로 상이한 설계기준의 적용을 배제 시켜 안전한 도로 설계 및 도로 안전시설물의 설치 활용 방안을 제시하였다.
박형진(2007)은 시뮬레이터를 이용하여 장대터널의 설계 단계에서 도로의 안전성 및 주행성을 미리 검증하 기 위하여 터널 주행 시뮬레이터를 이용하여 실제 터널 과 유사한 환경을 설정하고 운전자의 생체반응을 측정
₩분석하여 터널 조건에 따른 도로의 안전성 및 주행성 측면의 대안을 제시하였다.
Stuart T. Godley(2002)는 차량 운전자들의 과속 행태를 평가하고자 럼블 스트립이 설치된 단속류 도로 의 신호교차로의 좌-우 곡선에서 피실험자들의 주행 data 평균을 이용하여 각각의 지점에서 감속도를 분석 하였다. 분석방법으로 절대 검증, 유효성 검증을 사용하 였으며 각 구간의 상호 관련성 검증결과 신호교차로, 후 곡선, 좌곡선에서 감속도는 실제 도로주행과 Driving Simulator 실험결과 모두 유사하게 나타났으나, 주행 속도는 다른 연구결과와 다르게 Driving Simulator 실험 시 보다 실제 도로주행 시 주행속도가 더 높은 것 으로 나타났다.
Jan Tonros(1998)은 Driving Simulator 실험과 실제 도로주행을 통해 도로 터널부에서 운전자의 주행 행태를 분석하였으며, 분석항목으로 차량의 횡방향 이 격거리, 주행속도 항목 등이 포함된다. 분석결과 횡방 향 이격거리와 주행속도는 상관관계가 높은 것으로 나 타났다.
Saeed Sahami(2013)은 시뮬레이터 주행 실험 전 시 뮬레이터 적응을 위한 연습 시나리오를 설계할 때 슬라 럼, 코너링을 Driving Simulator 적용 시와 비적용 시 로 구분하여 성별, 나이, 운전경력에 따라 실험을 실시 하고, 평균 적응시간, 평균 속도 등을 비교하였다. 비교 결과 적응시간에 따라 점차 실제 주행과 유사한 결과를 나타냈으나, 전반적인 결과는 실제 주행 실험보다 높은
주행속도, 과감한 주행행태를 나타냈다.
2.1.2. 차량의 주행속도에 관한 연구
Kay Fitzpatrick(2011)은 양방향 4차로 시외 도 로의 평면곡선부와 직선부 구간에서 주행속도에 미치 는 영향을 분석한 결과, 이들 두 구간에서 영향을 가 장 많이 미치는 요소는 속도제한이며, 도로 곡선구간 에서 곡선반경과 접근밀도에도 큰 영향을 받는 것으 로 나타났다. 또한 속도제한 변수를 제외한 분석은 도 로 직선구간에서는 차로 폭이 주행속도에 영향을 미 치는 요인으로 나타난 반면, 도로 곡선구간에서는 중 앙분리대 유무와 도로변 개발 유무가 유의한 요인으 로 나타났다.
Migletz 등(1999)은 공사구간 내에서의 제한속도 감 소 정도, 실제 주행속도와 교통사고의 관계를 분석한 결 과, 감속이 필요한 구간에서는 낮은 제한속도 표지를 설 치할 때가 제한속도를 설치하지 않았을 때 보다 주행속 도가 낮게 형성되고, 교통사고 발생률도 낮음을 보였다.
또한 공사구간에서의 속도관리는 각 구간별로 서로 다 른 제한속도를 적용할 시 제한속도를 10mph 정도 낮출 때 바람직함을 보였다. 이와 같이 제한속도는 운전자가 판단하는 운전 중의 내적 위험수준을 결정하는 요인으 로 다른 속도 선택 요인들과 어우러져 운전속도에 영향 을 주는 많은 요인들 중 하나로 인정된다.
2.1.3. 차량의 횡방향 이격거리에 관한 연구
강민수(2003)는 차로와 차량폭에 따른 주행행태를 파 악하고, 이에 따른 포장 손상 저감효과를 분석하는 연구 를 수행한 바 있다. 이를 위해 국내 8종의 차종 중 5개 종류(1,4,5,6,7종)의 차종에 대해 도로폭 3.0m, 3.3m, 3.5m의 직선구간에서 주행행태를 분석하였다. 분석 결 과, 95% 신뢰도에서 조사된 5종 차종 모두 차량의 수평 방향 분산(차량의 횡방향 이격거리)의 분포는 정규분포 로 간주할 수 있는 것으로 분석되었으며, 차량의 수평방 향 분산행태는 차로 폭이 넓을수록, 차량의 폭이 작을수 록 커지는 것으로 나타났다.
이영우(2011)는 도시부도로의 곡선구간에서 주행 차 량의 횡방향 이격량을 분석하여 차량 주행에 필요한 최 소 차로 폭을 산정하였다. 분석결과 작은(Compact car) 차량일수록 이격량이 크며, 큰차일수록 상대적으 로 적은 이격량을 보인다. 지점별 횡방향 이격량 분포는 다음 Fig. 2와 같다.
Kasahara, A(1982)는 일본의 고속도로에서 수행한 현장연구를 통해 차량의 횡방향 이격거리 분포가 아스 팔트 콘크리트 포장의 수명을 예측하는데 미치는 영향 에 대하여 조사하였다. 고속도로 현장조사에서 비디오 카메라를 이용하여 주행하는 차종, 총중량, 타이어의 종 류, 바퀴 사이 거리, 차로 폭 등에 대한 차량 횡방향 이 격거리 범위를 분석하여 정의하였다. 통행차로에서 횡 방향 좌₩우 여유공간이 차량의 횡방향 이격거리 범위에 미치는 영향을 평가하기 위하여 차량 바퀴의 외측 부분 과 외측 차로의 평균 거리를 측정하였으며, 이때의 거리 는 0.8m~1.1m의 범위로 나타났다.
Terumitsu Hirata(2007)의 연구결과에 따르면 실 제 운전속도보다 Driving Simulator 실험의 주행속도 가 더 높으며 차량의 횡방향 이격거리와 Subjects 위치 에 대해 Driving Simulator 실험 시 더 가깝게 주행하 는 것으로 나타났다.
차량의 횡방향 이격거리의 편차는 도로가 직선일때 매우작지만, 곡선부는 Driving Simulator 실험 결과 값이 더 크게 나타났으며, 특히 주행속도와 차량의 횡 방향 이격거리 간 관련성이 높은 것으로 나타났다.
2.2. 기존연구의 한계와 본 연구의 차별성
Driving Simulator 실험과 실제 도로주행의 차이에 관한 문헌 검토 결과, 감속도₩럼블 스트립 등에 대한 효 과분석 혹은 단속류 구간 대상 비교 연구는 다수 존재한 다. 또한 Driving Simulator 실험 시뮬레이터만 이용 한 연구는 비용, 위험성 측면을 고려할 때 실제 도로의 구축 및 피실험자 안전성이 보장되지 않는 경우(2+1차 로 도로, 지하도로 같은 새로운 형태의 도로나 실제 도 로주행 실험 시 피실험자 안전을 보장하고자 하는 사례)
활용하는 것으로 나타났다.
기존 연구는 특정 요인(감속도, 럼블 스트립)에 대한 비교실험과 개선안이 적용된 도로에 대한 안전성 분석 연구는 다수 존재하지만 Driving Simulator 실험과 실제 도로주행의 가장 큰 특성 차이인 도로환경, 인간 공학(몰입도, 불안감, 긴장감 등) 요인을 언급하는 연 구사례는 미비하다. 본 연구에서는 연속류 도로를 대상 으로 하며, 연속 주행 시 Driving Simulator 실험 결 과와 실제 도로주행 결과의 차이에 관한 분석을 실시한 다.
3. 자료수집 및 연구방법론 검토 3.1. 자료수집방법
3.1.1. 개요
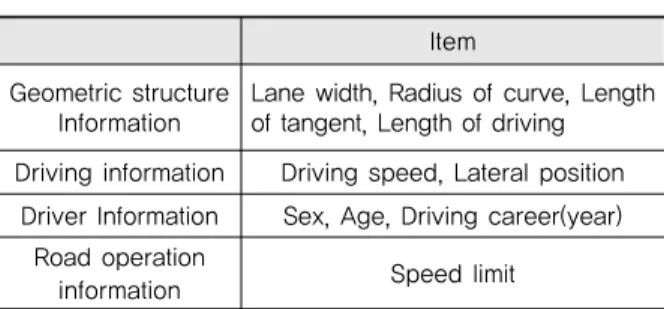
Driving Simulator 실험을 위해 실제 도로의 기하 구조 정보가 필요하다. 이를 위해 현장조사 대상 구간을 선정하고, 도로 설계도면을 이용하여 실제 도로주행 구 간과 동일한 Driving Simulator 실험 맵을 구축, Driving Simulator 실험을 실시한다. 주행 Data는 실 제 도로주행과 Driving Simulator 실험을 통해 취득 하며, 이 Data를 분석에 활용하게 된다. 자료수집 항목 은 기하구조 정보, 주행 정보, 피실험자 정보, 도로 운영 정보로 구분되며, 차이를 분석하고 보정하고자 하는 주 행속도, 차량의 횡방향 이격거리는 주행 정보에 포함된 다. 각 구분별 수집항목은 Table 1과 같다.
3.1.2. 기하구조 조사 및 실험 대상지 선정
실제 도로주행 및 자료수집 대상지는 충청북도 지역 일반국도 3개(3호선 2구간, 19호선 1구간, 24호선 1구 간) 노선, 4개 구간이며, 기하구조 특성은 곡선반경 290m~2,990m, 직선 길이 30m~1,560m의 크기가 분포되어 있다. 각 구간의 시점부터 종점까지의 구간 길 이, 기하구조 특성은 Table 2, Fig 3과 같다.
Table 1. Item for Analysis
Item Geometric structure
Information
Lane width, Radius of curve, Length of tangent, Length of driving Driving information Driving speed, Lateral position
Driver Information Sex, Age, Driving career(year) Road operation
information Speed limit
Fig. 2 Range of Lateral Position in Accordance with Survey Point and Car
가상 맵 구축을 위한 도로 선형 및 도로환경 조사는 도로 설계도면을 이용하여 조사하였으며, 모형 검증을 위하여 각각의 구간에서 3km씩 총 12km 구간은 data 분 석에서 제외한다. 실제 도로주행 실험 시 주행조건은 타 차량으로부터 받는 주행행태 변화를 최소화하기 위하여 Free Flow상태로 설정한다. 사전 교통량 조사를 통하 여 오전₩오후첨두시를 제외한 시간에 실제 주행실험을 실시하였으며, 만약 주행 중 타 차량으로 인해 감속, 차 선변경 등 주행행태의 변화가 발생할 경우 해당 실험 Data는 폐기하고 재실험을 실시하였다.
3.2. 자료수집을 위한 실험장비
실제 도로주행 실험은 지능형 주행기록 장치 (Intelligent Driving Recorder)를 이용하고, Driving Simulator Data는 Data Logger를 통해 취득한다.
3.2.1. 지능형 주행기록장치
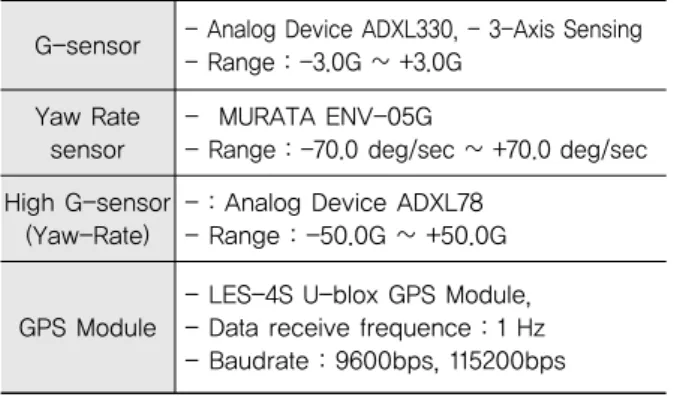
실제 도로주행 data는 지능형 주행기록 장치를 이용 해 주행속도, GPS 좌표를 수집하였으며, 차량 대시보 드 중앙에 캠코더를 설치하여 실험 종료 후 녹화된 영상 을 바탕으로 지점별 횡방향 이격거리를 측정하였다. 지 능형 주행기록장치는 주행궤적(GPS)의 신뢰성을 검증 하기 위해서 GPS장치를 통해서 얻어진 좌표계를 나열 한 경로와 주행도로의 위성사진을 비교해보았다. 경로 의 오차율을 수치적으로 나타내는 것은 어려웠으나, 거 의 일치하는 것으로 나타났다.해당 장비의 개략적인 측 정범위 정보는 Table 3과 같다.
3.2.2. 주행 시뮬레이터(Driving Simulator) 주행 시뮬레이터는 I-drive 3ch., 2DOF MP 품종으 로서, PCIG 영상 엔진, 32인치 3채널, 1/4차량 형태 캐 빈 및 CFLS, 2축 전기식 1인승 모션 플랫폼, 운영 computer 1식, 조명 및 Air Conditioner 1식으로 구 성되어 있다.
Start point & end point Length
No.3
Yeonpung Intersection~Suanbo Intersection, Suanbo Intersection~Youngchun three-way Intersection
19.4km
No.19 Shinki Intersection~Sesung Intersection 14.4km No.34 Daeduck Intersection~Guan Tree-way Intersection 12.8km
Table 2. Path Information for Driving Test
Fig. 3 Path Information for Driving Test
Fig. 6 Driving Simulator
Fig. 4 An Overlap of the GPS Trajectory and Actual Dirving Section
Table 3. The Information of Intelligent Driving Recorder
Fig. 5 Intelligent Driving Recorder G-sensor - Analog Device ADXL330, - 3-Axis Sensing
- Range : -3.0G ~ +3.0G Yaw Rate
sensor
- MURATA ENV-05G
- Range : -70.0 deg/sec ~ +70.0 deg/sec High G-sensor
(Yaw-Rate)
- : Analog Device ADXL78 - Range : -50.0G ~ +50.0G
GPS Module
- LES-4S U-blox GPS Module, - Data receive frequence : 1 Hz - Baudrate : 9600bps, 115200bps
주행 시뮬레이터의 Data Log는 다음 그림과 같으며, Data는 Excel을 통해 가공₩분석이 가능하다.
3.2.3. UC-Win/Road S/W
Driving Simulator 실험을 위한 주행 맵은 Forum8 社의 UC-Win/Road를 이용하여 제작하였으며, 설계 도면을 통해 조사한 곡선반경, 도로 폭, 직선 길이 등의 수치를 바탕으로 실제 도로와 동일한 기하구조에서 Driving Simulator 실험을 실시한다. 가상주행 실험 맵이 현실과 가장 유사하게 구축하기 위하여 실제 도로 위치의 위성지도를 이용하여 도로 구축 주변의 지형을 구축하였다.
3.4. 실차주행 및 가상주행 실험 3.4.1. 주행실험 개요
실제 도로주행을 먼저 실시하여 해당구간이 연속류 주행 시 문제가 없는지 검토하고 Driving Simulator 실험 맵을 구축하여 Driving Simulator 실험을 실시 한다. 이후 동일한 구간에 대한 주행기록(주행속도, 차 량의 횡방향 이격거리)에 대한 차이를 분석하게 된다.
주행실험에 참여할 피실험자 정보는 성별, 연령, 운전 경력, 사고경험을 고려하여 모집하였다.
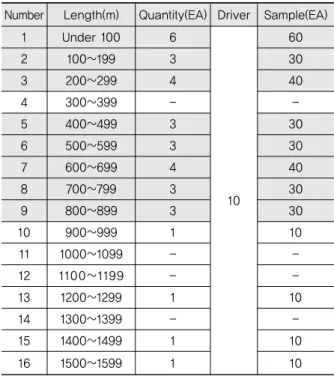
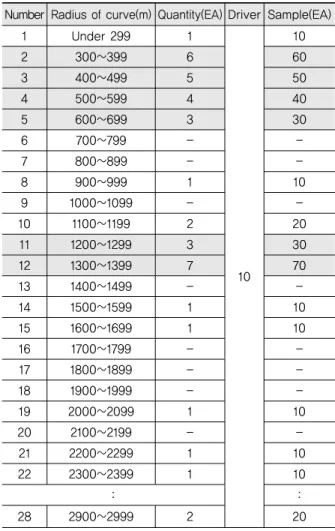
3.4.2. 분석대상 구간의 기하구조 구분 및 Sample 수 실험대상 구간의 기하구조 분포는 곡선반경 최소 299m~최대 2,990m이며, 직선 길이는 최소 30m~ 최 대 1,599m의 분포로 구성되어 있다. 분석의 용이를 위 하여 실험대상 구간의 곡선반경, 직선 길이를 100m 단 위로 구분하였다. 피실험자 10명이 4개 실험구간(전체 46.6km구간)을 주행할 경우 크기별 직선부, 곡선부 개 수가 통계분석을 위한 최소 Sample 30개에 못 미치는 구간도 몇몇 나타나는데 본 연구에서는 Sample 개수 가 30개 이상 확보되는 구간에 대해서 분석을 실시하기 로 한다. 만약 전체 46.6km구간에 직선 길이 100m 이 하의 구간이 6개라면 10명의 운전자가 주행할 경우 직 선 길이 100m 이하 구간 sample은 60개가 된다. 곡선 부, 직선부 30개 이상의 Sample이 확보되는 구간(음 영 표시) 및 Sample 개수는 다음 Table 5, Table 6과 같다.
Fig. 7 Data Log of Driving Simulator
Fig. 8 Simulation Map for Virtual Driving
Table 4. Information of Driver
(Real Driving and Virtual Driving)
Item Information
Sex Male`=`8, Female`:`2
Age 20’s`=`6, 30’s`=`1, 40’s`=`1, 60’s`=`2 Driving career Under 3year’s`=`3, 3~5year’s`=`4,
5~10year’s`=`3
Accident None
Table 5. Number of Usable Sample at Tangent
Number Length(m) Quantity(EA) Driver Sample(EA)
1 Under 100 6
10
60
2 100~199 3 30
3 200~299 4 40
4 300~399 - -
5 400~499 3 30
6 500~599 3 30
7 600~699 4 40
8 700~799 3 30
9 800~899 3 30
10 900~999 1 10
11 1000~1099 - -
12 1100~1199 - -
13 1200~1299 1 10
14 1300~1399 - -
15 1400~1499 1 10
16 1500~1599 1 10
통계적 분석을 위하여 Sample 수가 30개를 넘는 구 간에 대해 분석 및 모형 구축에 활용하며, 30개 미만의 구간은 분석 및 모형 구축 범위에 포함하지 않는다.
3.4.3. 수집자료의 정규성 검증
직선부 실차주행-가상주행 속도차이에 대한 분석 대 상자료의 차이는 다음과 같다.
직선부 길이가 짧을수록 Driving Simulator 실험과 실제 도로주행 간 속도 차이가 크고 직선부 길이가 길수 록 Driving Simulator 실험과 실제 도로주행 간의 속 도 차이가 점점 작아지는 것을 알 수 있는데, 이는 직선 부 앞, 뒤에 존재하는 곡선부의 진출속도에 영향을 받는 것으로 판단된다.
곡선부 실제 도로주행-Driving Simulator 속도 차 이는 다음 Table 8과 같다.
곡선부 실제 도로주행과 Driving Simulator 속도 차 이도 마찬가지로 곡선반경이 작을수록 Driving
Fig. 9 Speed Comparison of Real Driving and Virtual Driving at Tangent
Radius of curve(m)
Speed of real driving(km/h)
Speed of virtual driving(km/h)
Gap (km/h)
K-S 검증
300~399 52.0 79.8 27.7 0.000
400~499 54.4 76.5 22.0 0.000
500~599 64.7 84.3 19.5 0.000
600~699 62.1 80.2 18.1 0.000
1200~1299 69.7 84.5 14.7 0.000
1300~1399 75.5 88.8 13.2 0.000
Table 8. Speed Comparison of Real Driving and Virtual Driving at Curve
Number Radius of curve(m) Quantity(EA) Driver Sample(EA)
1 Under 299 1
10
10
2 300~399 6 60
3 400~499 5 50
4 500~599 4 40
5 600~699 3 30
6 700~799 - -
7 800~899 - -
8 900~999 1 10
9 1000~1099 - -
10 1100~1199 2 20
11 1200~1299 3 30
12 1300~1399 7 70
13 1400~1499 - -
14 1500~1599 1 10
15 1600~1699 1 10
16 1700~1799 - -
17 1800~1899 - -
18 1900~1999 - -
19 2000~2099 1 10
20 2100~2199 - -
21 2200~2299 1 10
22 2300~2399 1 10
: :
28 2900~2999 2 20
Table 6. Number of Usable Sample at Curve
Table 7. Speed Comparison of Real Driving and Virtual Driving at Tangent
Length of tangent(m)
Driving speed of real driving(km/h)
Driving speed of virtual driving(km/h)
Gap (km/h)
K-S 검증
Under 100 59.5 80.3 20.8 0.000
100~199 63.5 86.0 22.5 0.000
200~299 56.2 79.7 23.4 0.000
400~499 67.7 88.6 20.8 0.000
500~599 79.2 94.4 15.1 0.000
600~699 81.3 93.1 11.8 0.000
700~799 82.8 93.8 11.0 0.000
800~899 89.9 99.4 9.4 0.000
Fig. 10 Speed Comparison of Real Driving and Virtual Driving at Curve
Simulator 실험과 실제 도로주행 간의 속도 차이가 크고 곡선반경이 클수록 차이가 점점 작아지는 것으로 나타난 다. 이는 Driving Simulator 주행 시 현실감 및 몰입도 가 떨어져 해당 곡선부에서 적정 속도까지 감속하지 않고 높은 속도로 주행하면서 나타나는 결과로 판단된다.
4. 실차주행과 가상주행 차이보정 모형개발 4.1. 주행속도 보정모형의 개요
4.1.1. 변수선정
실제 도로주행 및 Driving Simulator 실험을 통해 취득된 속도 Data 기하구조별 엑셀 파일로 구축하고 Driving Simulator 실험과 실제 도로주행 실험간 속 도 차이를 설명할 수 있는 적합한 변수들을 선정하였다.
선정된 변수는 Table 9와 같다.
4.1.2. 자료의 기초통계분석
조사한 변수에 대한 최소값, 최대값, 평균, 표준편차 는 다음과 같다. 나이변수는 50세 이상은 고령운전자 (old)로, 50세 미만은 비고령운전자(young)로 가정하 였다. 보통 고령자는 65세 이상을 의미하지만, 65세 이 상의 피실험자를 모집하는 것은 한계가 있었다.
4.1.3. 변수간 상관분석
독립변수간 상관분석을 통하여, 상관도가 매우 높아 다중공선성을 발생시킬 수 있는지 여부를 확인하였다.
상관도가 높아 다중공선성이 발견된 변수는 없는 것으 로 판단되었다. VIF 값이 1.0 이상이라면 다중공선성 Table 9. Used Item to Calibration Model of Driving
Speed
Driving speed
Radius of curve, Length of Tangent, Speed of real driving, Speed of virtual driving, Sex, Age, Lane width, Speed limit, Driving career (year)
Item Maximum Minimum Ave. Standard deviation Speed of real
driving (km/h) 104.8 68.9 79.961 13.671 Speed of virtual
driving (km/h) 117.9 55.1 93.02 11.06 Length of
tangent(m) 1,599 30 - -
Sex
(Male=1, Female=0) 1 0 .91 .286
Age
(old=0, young=1) 1 0 .91 .286
Lane width(m) 3.5 3 3.388 .1251
Speed limit(km/h) 80 60 78.28 4.918
Driving
career(year) 8 1 5.21 2.514
Table 10. Foundations Statistical Analysis of Driving Speed at Tangent
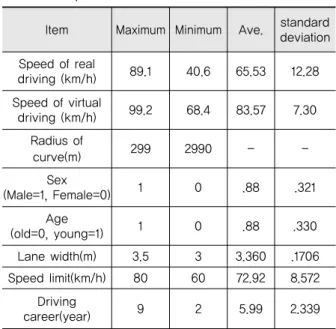
Table 11. Foundations Statistical Analysis of Driving Speed at Curve
Item Maximum Minimum Ave. standard deviation Speed of real
driving (km/h) 89.1 40.6 65.53 12.28 Speed of virtual
driving (km/h) 99.2 68.4 83.57 7.30 Radius of
curve(m) 299 2990 - -
Sex
(Male=1, Female=0) 1 0 .88 .321
Age
(old=0, young=1) 1 0 .88 .330
Lane width(m) 3.5 3 3.360 .1706
Speed limit(km/h) 80 60 72.92 8.572
Driving
career(year) 9 2 5.99 2.339
Length of tangent
(m) Driving speed of
virtual driving (km/h)
Sex (Male=1, Female=0)
Age (Old=0, Young=1)
Lane width (m)
Speed limit (km/h)
Driving career (year)
Collinearity statistics Tolera
nce VIF Length of
tangent (m)
1.00 .466 .024 .027 .326 .421 .375 .621 1.61
Driving speed of
virtual driving (km/h)
.466 1.00 .105 .083 .349 .284 .157 .722 1.38
Sex (Male=1, Female=0)
.024 .105 1.00 -.018 -.080 -.058 .078 .966 1.03
Age (Old=0, Young=1)
.027 .083 -.018 1.00 .046 .030 .011 .992 1.00
Lane
width(m) .326 .349 -.080 .046 1.00 .469 -.015 .688 1.45 Speed
limit (km/h)
.421 .284 -.058 .030 .469 1.00 .252 .672 1.48
Driving career (year)
.375 .157 .078 .011 -.015 .252 1.00 .804 1.24 Table 12. Correlation Analysis and Collinearity
Statistics (on Tangent)
을 의심해 보아야 하며, 1보다 꽤 큰 값이라면, 다중공 선성이 회귀모델이 편향되게 만들었다고 의심해야 한다 (Myers, 1990). Tolerance값은 1/VIF 이므로, 0.1 이 하라면 다중공선성으로 심각한 문제가 있으며, 0.2정도 는 주시할 정도이다(Myers, 1990). 본 연구에서 수집한 자료는 VIF가 1을 약간 넘는 정도이지만 Tolerance값 이 높아 다중공선성으로 문제가 의심되지 않는다.
4.2. 주행속도 보정모형 개발
4.2.1. 직선부 주행속도 차이 보정모형의 개발 및 해석 분석 시 신뢰수준은 95%(sig=0.05)로 설정하였으며, 모형은 선형회귀식을 사용하였으며, 상관분석 결과값을 기준으로 모형의 유의성을 판단한다. 모형은 직선부 주 행속도 차이 보정모형, 곡선부 주행속도 차이 보정모형 으로 구분된다.
직선부 주행속도 차이 보정모형 분석결과는 다음 Table 14와 같다.
직선부 주행속도 차이 보정모형 분석결과 값이 0.795로 79.5%의 설명력을 나타냈다.
분석 결과, 설명변수들 중 성별 항목은 유의수준 0.078을 나타내 95% 유의수준에 포함되지 않는 것으로 나타났다. 따라서, 성별 항목을 제외한 직선 길이, Driving Simulator 실험속도, 연령, 차로 폭, 제한속도, 운전경력 항목을 포함하여 모형식을 구축하도록 한다.
여기서,
=실차주행속도-직선부
=직선길이, =Driving Simulator 속도,
=연령, =차로 폭, =제한속도,
=운전경력
직선 길이( )는 직선부 실제 도로주행 차이에 양(+) 의 영향을 주는 것으로 나타났다. 즉, 직선 길이가 길수 록 Driving Simulator 실험과 실제 도로주행의 차이 가 커짐을 의미한다.
Driving Simulator 속도( )는 직선부 실제 도로주 행의 차이에 양(+)의 영향을 주는 것으로 나타났다. 이 는 실 제 도 로 주 행 속 도 가 높 을 수 록 Driving Table 13. Correlation Analysis and Collinearity
Statistics (on Curve)
Radius (m)
Driving speed of virtual driving (km/h)
Sex (Male=1, Female
=0) Age (Old=0, Young
=1) Lane width (m)
Speed limit (km/h)
Driving career (year)
Collinearity statistics Tolera
nce VIF Radius
(m) 1.00 .492 .074 .068 .273 .748 .290 .298 3.36 Driving
speed of virtual driving (km/h)
.492 1.00 -.113 -.069 .527 .639 .093 .524 1.90
Sex (Male=1, Female=
0)
.074 -.113 1.00 .399 -.242 -.166 .099 .775 1.29
Age (Old=0, Young=1)
.068 -.069 .399 1.00 -.254 -.143 .202 .791 1.26
Lane
width(m) .273 .527 -.242 -.254 1.00 .590 -.254 .510 1.96 Speed
limit (km/h)
.748 .639 -.166 -.143 .590 1.00 -.038 .224 4.47
Driving career (year)
.290 .093 .099 .202 -.254 -.038 1.00 .704 1.42
R R Square Adjusted R Square
.892 .795 .794
Table 14. The Result of Explanation Ability of the Calibration Formula for Dirving Speed at Tangent
Table 15. The Result of Analysis of the Calibration Formula for Driving Speed at Tangent
Model
Unstandardized coefficients
Standardized coefficients
t Sig.
B Std.
error Beta
(Constant) -64.813 4.844 -13.379 .000 Length of
tangent 2.183 .097 .349 22.440 .000 Speed of virtual
driving(km/h) .535 .018 .439 30.471 .000
Sex -1.038 .588 -.022 -1.765 .078
Age -5.577 .580 -.118 -9.609 .000
Lane width(m) 4.975 1.591 .046 3.127 .000
Speed limit
(km/h) .860 .041 .314 20.994 .000
Driving
career(year) .261 .073 .049 3.569 .000
(1)
Simulator 실험 속도가 높게 나타나는 것을 의미하는 데, Driving Simulator 실험 시 운전자들의 집중도, 몰입도, 불안감 등이 떨어지기 때문이다. 연령( )은 음 (-) 의 영향을 주는 것으로 나타났다. 비고령자일수록 Driving Simulator 실험과 실제 도로주행 간 속도 차 이가 더 커지는 것으로 판단할 수 있다. 차로 폭( )은 양(+)의 영향을 주는 것으로 나타났다. 이는 차로 폭이 넓을수록 주행속도 결과 차이가 크게 나타나는 것을 의 미하며, 차로 폭이 넓어짐에 따라 주행속도가 일반적으 로 증가하는 바와 같다. 제한속도( )는 양(+)의 영향을 주는 것으로 나타났다. 이는 제한속도가 높을수록 주행 속도 차이가 커진다는 것을 의미하며, Driving Simulator 실험 시 실제 도로주행에 비해 현실감이 떨 어지기 때문에 제한속도까지 혹은 초과하여 주행하는 것으로 나타났다. 운전경력( )은 양(+)의 영향을 주는 것으로 나타났다. 경력이 높은 사람일수록 높은 속도로 주행하는 것으로 나타났다.
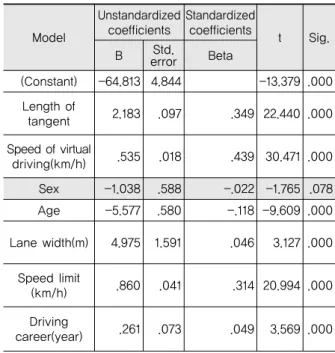
4.2.2. 곡선부 주행속도 차이 보정모형의 개발 및 해석 곡선부 주행속도 차이 보정모형 분석결과는 다음 Table 16과 같다.
곡선부 주행속도 차이 보정모형 분석결과 값이 0.886으로 88.6%의 설명력을 나타냈다.
모형 분석 결과, 모든 변수들이 종속변수를 설명하는 데 문제가 없는 것으로 판단되어 곡선반경, Driving Simulator 실험속도, 성별, 연령, 차로 폭, 제한속도, 운전경력 항목을 포함한 곡선부 주행속도 차이 보정을 위한 모형식을 구축하도록 한다.
여기서,
=실차주행속도-곡선부
=곡선반경, =Driving Simulator 속도,
=성별, =연령, =차로 폭,
=제한속도, =운전경력
곡선반경( )은 양(+)의 영향을 주는 것으로 나타났 다. 곡선반경이 작을수록 횡방향으로 밀려나는 힘이 커 지기 때문에 주행속도를 낮춰 주행하는 것으로 판단된 다. Driving Simulator 속도( )는 직선부 실제 도로 주행 차이에 양(+)의 영향을 주는 것으로 나타났다.
Driving Simulator 실험 시 실제 도로주행에 비해 집 중도, 몰입도, 불안감 등이 떨어지기 때문에 실제 도로 주행속도에 비례하여 Driving Simulator 속도가 높게 나타난다. 성별( )은 음(-) 의 영향을 주는 것으로 나 타났다. 이는 남자=0, 여자=1로 자료를 구축함에 따라 남자일수록 Driving Simulator 실험과 실제 도로주행 간 차이가 더 크게 나타난다. 연령( )은 음(-) 의 영향 을 주는 것으로 나타났다. 이는 비고령자=0, 고령자=1 로 자료를 구축함에 따라 비고령자일수록 Driving Simulator 실험과 실제 도로주행 간 속도 차이가 더 커지는 것으로 판단된다. 차로 폭( )은 양(+)의 영향 을 주는 것으로 나타났다. 이는 차로 폭이 넓을수록 주 행속도 결과 차이가 크게 나타나는 것을 의미하며, 차 로 폭이 넓어짐에 따라 주행속도가 일반적으로 증가하 는 바와 같다. 제한속도( )는 양(+)의 영향을 주는 것 으로 나타났다. 이는 제한속도가 높을수록 주행속도 차 이가 커진다는 것을 의미하며, 제한속도가 높을수록 실 제 차량 운전자는 낮은 속도~높은 속도까지의 속도편 차가 높게 나타난다. 운전경력( )은 양(+)의 영향을 주는 것으로 나타났다. 모형 분석 결과 운전경력이 높 은 사람일수록 주행속도를 높게 운행하는 것으로 판단 된다.
Table 16. The Result of Explanation Ability of the Calibration Formula for Dirving Speed at Curve
R R Square Adjusted R Square
.941 .886 .885
Model
Unstandardized coefficients
Standardized
coefficients t Sig.
B Std.error Beta
(Constant) -12.644 4.050 -3.122 .002 Radius of
curve .549 .072 .185 7.580 .000
Speed of Virtual
driving(km/h) 1.010 .031 .601 32.710 .000 Sex -6.308 .578 -.165 -10.921 .000
Age -4.124 .556 -.111 -7.411 .000
Lane width(m) -9.504 1.340 -.132 -7.092 .000 Speed limit
(km/h) .453 .040 .317 11.262 .000
Driving
career(year) -.363 .083 -.069 -4.364 .000 Table 17. The Result of Analysis of the Calibration Formula
for Dirving Speed at Curve
(2)
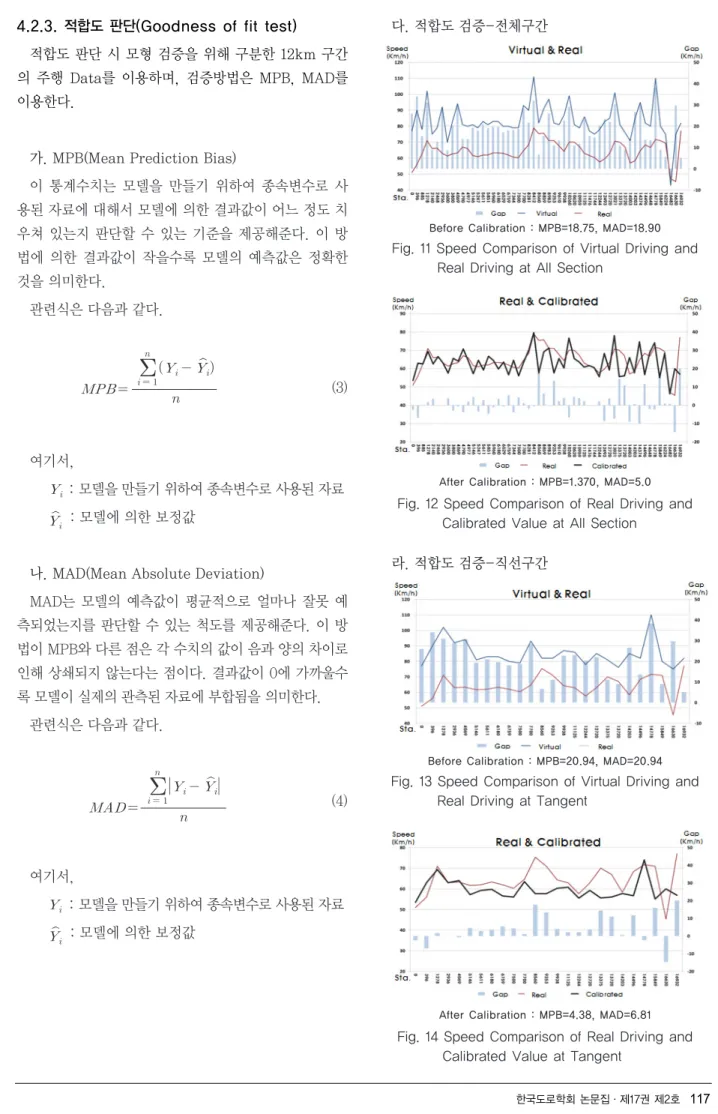
4.2.3. 적합도 판단(Goodness of fit test)
적합도 판단 시 모형 검증을 위해 구분한 12km 구간 의 주행 Data를 이용하며, 검증방법은 MPB, MAD를 이용한다.
가. MPB(Mean Prediction Bias)
이 통계수치는 모델을 만들기 위하여 종속변수로 사 용된 자료에 대해서 모델에 의한 결과값이 어느 정도 치 우쳐 있는지 판단할 수 있는 기준을 제공해준다. 이 방 법에 의한 결과값이 작을수록 모델의 예측값은 정확한 것을 의미한다.
관련식은 다음과 같다.
여기서,
: 모델을 만들기 위하여 종속변수로 사용된 자료 : 모델에 의한 보정값
나. MAD(Mean Absolute Deviation)
MAD는 모델의 예측값이 평균적으로 얼마나 잘못 예 측되었는지를 판단할 수 있는 척도를 제공해준다. 이 방 법이 MPB와 다른 점은 각 수치의 값이 음과 양의 차이로 인해 상쇄되지 않는다는 점이다. 결과값이 0에 가까울수 록 모델이 실제의 관측된 자료에 부합됨을 의미한다.
관련식은 다음과 같다.
여기서,
: 모델을 만들기 위하여 종속변수로 사용된 자료 : 모델에 의한 보정값
다. 적합도 검증-전체구간
라. 적합도 검증-직선구간 (3)
(4)
Fig. 11 Speed Comparison of Virtual Driving and Real Driving at All Section
Before Calibration : MPB=18.75, MAD=18.90
Fig. 12 Speed Comparison of Real Driving and Calibrated Value at All Section
After Calibration : MPB=1.370, MAD=5.0
Fig. 13 Speed Comparison of Virtual Driving and Real Driving at Tangent
Before Calibration : MPB=20.94, MAD=20.94
Fig. 14 Speed Comparison of Real Driving and Calibrated Value at Tangent
After Calibration : MPB=4.38, MAD=6.81
마. 적합도 검증-곡선부
4.3. 횡방향 이격거리 보정모형의 개요 4.3.1. 변수선정
실제 도로주행 및 Driving Simulator 실험을 통해 취득된 주행속도 Data를 기하구조별로 구분하여 엑셀 파일로 구축하였다. Driving Simulator 실험과 실제 도로주행 간 주행속도 차이를 설명할 수 있는 적합한 변 수들을 선정하였다.
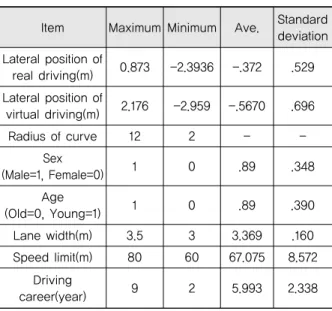
4.3.2. 자료의 기초통계분석
조사한 변수에 대한 최소값, 최대값, 평균, 표준편차 는 다음 Table 19, Table 20과 같다.
분석대상 자료의 차이는 다음과 같다.
Item Maximum Minimum Ave. Standard deviation Lateral position of
real driving(m) 0.873 -2.3936 -.372 .529 Lateral position of
virtual driving(m) 2.176 -2.959 -.5670 .696
Radius of curve 12 2 - -
Sex
(Male=1, Female=0) 1 0 .89 .348
Age
(Old=0, Young=1) 1 0 .89 .390
Lane width(m) 3.5 3 3.369 .160
Speed limit(m) 80 60 67.075 8.572
Driving
career(year) 9 2 5.993 2.338
Table 18. Used Item to Calibration Model of Lateral Position
Lateral position
Radius of curve, Length of tangent, Lateral position of real driving, Lateral position of virtual driving, Sex, Age, Lane width, Speed limit, Driving career(year)
Item Maximum Minimum Ave. Standard deviation Lateral position of
real driving(m) 1.179 -1.685 -.296 .230 Lateral position of
virtual driving(m) 2.137 -1.746 -.175 .372
Radius of curve 9 1 - -
Sex
(Male=1, Female=0) 1 0 .89 .292
Age
(Old=0, Young=1) 1 0 .89 .300
Lane width(m) 3.5 3 3.386 .125
Speed limit(m) 80 60 71.72 4.918
Driving
career(year) 8 1 5.21 2.514
Table 19. Foundations Statistical Analysis of Lateral Position at Tangent
Table 20. Foundations Statistical Analysis of Lateral Position at Curve
Table 21. Gap Cmparison of Real Driving Position and Virtual Driving Lateral Position at Tangent
Length of tangent(m)
Absolute value of real driving(m)
Absolute value of virtual driving(m)
GAP (m)
Under 100 0.453 0.370 0.082
100~199 0.415 0.551 -0.136
200~299 0.296 0.515 -0.218
400~499 0.275 0.141 0.133
500~599 0.372 0.276 0.096
600~699 0.349 0.407 -0.058
700~799 0.323 0.205 0.117
800~899 0.263 0.152 0.110
Fig. 15 Speed Comparison of Virtual Driving and Real Driving at Curve
Before Calibration : MPB=16.86, MAD=17.14
Fig. 16 Speed Comparison of Real Driving and Calibrated Value at Curve
After Calibration : MPB=1.78, MAD=5.98
4.3.3. 변수간 상관분석
앞서 종속변수가 주행속도일때와 마찬가지로 독립변 수간 상관분석을 통하여, 상관도가 매우 높아 다중공선 성을 발생시킬 수 있는지 여부를 확인하였다. 본 연구에 서 수집한 자료는 VIF가 1을 약간 넘는 정도이지만 Tolerance값이 높아 다중공선성으로 문제가 의심되지 않는다.
Fig. 17 Gap Comparison of Real Driving Lateral Position and Virtual Driving Lateral Position at Tangent
Table 22. Lateral Position Comparison of Real Driving and Virtual Driving at Curve
Radius of curve(m)
Absolute value of real driving(m)
Absolute value of virtual driving(m)
GAP (m)
300~399 1.007 1.330 0.323
400~499 0.881 1.234 0.352
500~599 0.834 1.170 0.335
600~699 0.764 1.015 0.251
1200~1299 0.556 0.670 0.114
1300~1399 0.544 0.563 0.018
Fig. 18 Lateral Position Comparison of Real Driving and Virtual Driving at Curve
Table 23. Correlation Analysis and Collinearity Statistics (on Tangent)
Length of tangent
(m) Driving speed of
virtual driving (km/h)
Sex (Male=1, Female=0)
Age (Old=0, Young=1)
Lane width (m)
Speed limit (km/h)
Driving career (year)
Collinearity statistics Tolera
nce VIF Length of
tangent (m)
1.00 -.178 .129 -.085 .305 -.421 .375 .628 1.59
Driving speed of
virtual driving (km/h)
-.178 1.00 .424 .022 -
.061 .341 -.123 .715 1.39
Sex (Male=1, Female=0)
.129 .424 1.00 .090 -.209 .230 -.023 .690 1.45
Age (Old=0, Young=1)
-.085 .022 .090 1.00 -.147 .101 -.059 .969 1.03
Lane
width(m) .305 -.061 -.209 -.147 1.00 -.367 -.022 .735 1.36 Speed
limit (km/h)
-.421 .341 .230 .101 -.367 1.00 -.304 .645 1.55
Driving career (year)
.375 -.123 -.023 -.059 -.022 -.304 1.00 .790 1.26
Table 24. Correlation Analysis and Collinearity Statistics (on Curve)
Radius (m)
Driving speed of virtual driving (km/h)
Sex (Male=1,
Female
=0) Age (Old=0,
Young
=1) Lane width (m)
Speed limit (km/h)
Driving career (year)
Collinearity statistics Tolera
nce VIF Radius
(m) 1.00 .178 .069 -.114 .526 -.748 .290 .267 3.73 Driving
speed of virtual driving (km/h)
.178 1.00 .177 .048 .159 -.125 -.005 .922 1.08
Sex (Male=1, Female=
0)
.069 .177 1.00 .059 -.081 -.206 -.199 .875 1.14
Age (Old=0, Young=1)
-.114 .048 .059 1.00 -.147 .011 -.030 .957 1.04
Lane
width(m) .526 .159 -.081 -.147 1.00 -.324 .138 .685 1.46 Speed
limit (km/h)
-.748 -.125 -.206 .011 -.324 1.00 .038 .349 2.86
Driving career (year)
.290 -.005 -.199 -.030 .138 .038 1.00 .740 1.35
4.4. 횡방향 이격거리 보정모형 개발
4.4.1. 직선부 횡방향 이격거리 모형개발 및 해석 직선부 횡방향 이격거리 차이분석결과는 다음과 같다.
직선부 주행속도 차이 보정모형 분석결과, 값이 0.057로 5.7%의 설명력을 나타내나, 값이 0.057로 매우 낮아 모형 구축에는 제외하였다.
4.4.2. 곡선부 횡방향 이격거리 차이 보정모형 분석 곡선부 횡방향 이격거리 차이 분석결과는 다음과 같다.
곡선부 횡방향 이격거리 차이 보정모형 분석결과 값 이 0.454로 45.4%의 설명력을 나타냈다. 은 0.454로 상대적으로 낮으나 변수간 상관관계( )가 0.674를 나타 내 종속변수와 독립변수간 다소 높은 상관관계가 존재한 다고 판단되어 모형구축을 실시한다.
모형 분석 결과, 설명변수들 중 모든 변수들은 유의수 준 95%에 포함되는 것으로 나타났다. 따라서 곡선반경,
Driving Simulator 이격거리, 성별, 연령, 차로 폭, 제 한속도 항목을 포함한 모형식을 구축하도록 한다.
여기서,
=실차 횡방향 이격거리-곡선부
=곡선반경, =Driving Simulator 이격거리,
=성별, =연령, =차로 폭, =제한속도
곡선반경( )은 양(+)의 영향을 주는 것으로 나타났 다. 곡선반경이 작을수록 횡방향 이격거리가 짧고, 곡선 반경이 클수록 횡방향 이격거리가 높다는 것을 의미한 다. Driving Simulator 실험 시 체감 주행속도가 낮기 때문에 작은 곡선반경에서 높은 속도로 주행하여 횡방향 이격거리가 커지는 것으로 판단된다. Driving Simulator 이격거리( )는 양(+)의 영향을 주는 것으로 나타났다. 곡선부에서의 횡방향 이격거리는 주행 속도와 비례한다. 성별( )은 음(-)의 영향을 주는 것으로 나타 났다. 남자가 곡선부 Driving Simulator 실험 시 속도 를 더 높게 주행하는 것으로 판단된다. 연령( )은 음(- )의 영향을 주는 것으로 나타났다. 고령자일수록 곡선부 에서 낮은 속도로 주행하고 이격거리가 작게 나타났다.
차로 폭( )은 양(+)의 영향을 주는 것으로 나타났다. 차 로 폭이 넓을수록 주행 중 좌우로 벗어나는 범위가 커진 다. 제한속도( )는 양(+)의 영향을 주는 것으로 나타났 다. 제한속도는 주행속도와 연관되며, 횡방향 이격거리 와 연관성을 가지고 있다. 제한속도가 낮을수록 곡선부 주행속도가 낮고 횡방향 이격거리 범위가 좁아진다.
4.4.3. 적합도 판단 Table 25. The Result of Explanation Ability of the
Calibration Formula for Lateral Position at Tangent
Table 26. The Result of Explanation Ability of the
Calibration Formula for Lateral Position at Curve
R R Square Adjusted R Square
.239a .057 .052
R R Square Adjusted R Square
.674 .454 448
Table 27. The Result of Analysis of the Calibration Formula for Lateral Position at Curve
Model
Unstandardized coefficients
Standardized
coefficients t Sig.
B Std.error Beta
(Constant) -5.942 .429 -13.848 .000
Radius of
curve .054 .011 .512 5.061 .000
Speed of virtual
driving(km/h) .171 .027 .226 6.296 .000 Sex
(Male=0, Female=0)
-.184 .074 -.078 -2.485 .013 Age
(Old=0, Young=1)
-.260 .065 -.266 -.3996 .000 Lane width(m) .711 .102 2.716 6.961 .000
Speed limit
(km/h) .027 .004 2.045 6.463 .000
(5)
Fig. 19 Lateral Position Comparison of Virtual Driving Speed and Real Driving at Curve Before Calibration : MPB=-0.0396, MAD=0.275