Copyright
Ⓒ2014 KSAE / 133-05 pISSN 1225-6382 / eISSN 2234-0149
DOI http://dx.doi.org/10.7467/KSAE.2014.22.7.031Transactions of KSAE, Vol. 22, No. 7, pp.31-39 (2014)
FMCW 레이더에서의 1D FRI (Finite Rate of Innovation) 초고해상도 기법 적용 및 분석
유 경 우․공 승 현*
한국과학기술원 조천식 녹색교통대학원
Application and Analysis of 1D FRI (Finite Rate of Innovation) Super-resolution Technique in FMCW Radar
Kyungwoo Yoo․Seung-Hyun Kong*
The Cho Chun Shik Graduate School for Green Transportation, KAIST, Daejeon 305-701, Korea (Received 9 January 2014 / Revised 27 May 2014 / Accepted 3 July 2014)
Abstract : Recently, as Intelligent Transportation System (ITS) and self-driving system become influential in the ground transportation system, automotive radar systems have been actively studied among the various radar systems to implement the vehicle collision detection system and distance measurement system between vehicles. Most of the automotive radars are Frequency Modulated Continuous Wave (FMCW) radar type which can calculate distance and velocity of target by estimating the frequency difference between the transmitted signal and received signal. Therefore, accurate frequency estimation is very important in the FMCW radar system. For this reason, to improve the measurement accuracy of the FMCW radar, Reverse Directional FRI (RD-FRI) Super-Resolution technique which has high frequency estimation accuracy is applied to the FMCW radar system. The feasibility of the proposed technique is evaluated with simulation results and compared with FFT and conventional Super-Resolution techniques. The simulation results show that the proposed technique estimates the frequency with high accuracy and the distance with centimeter accuracy.
Key words : FMCW radar(FMCW 레이더), Super-resolution(초고해상도), FRI
1. 서 론1)
최근 지상 교통 시스템의 안전성과 효율성을 높 이기 위하여 다양한 차량 기술이 집약된 지능형 교 통 시스템 (ITS ; Intelligent Transportation System) 및 자율주행 시스템과 같은 첨단 시스템들이 대두됨에 따라 위치 정보 획득을 위한 항법 시스템의 역할이 매우 중요해졌다. 이 중에서 차량용 레이더는 충돌 을 방지하기 위해 요구되는 몇 가지 사항을 포함하 는 차량 제어 시스템 구현을 위해 필수적인 기술 중 하나로 고려되고 있다.1,2) 실제로 최근 밀리미터파
*
Corresponding author, E-mail: [email protected]
를 이용한 레이더 연구가 활발히 진행되고 있고 현 재 레이더 제품들이 차량에 부착되어 운용되고 있 다. 다양한 레이더 중에서도 Frequency Modulated Continuous Wave (FMCW) 레이더는 현재 가장 보편 적으로 운용되고 있는 차량용 레이더로 많은 기업 에서 채택하고 있다.
FMCW 레이더는 주파수 변조 신호를 이용한 레 이더로 송신 신호와 수신신호 간의 주파수 차이를 이용하여 목표물과의 거리와 상대속도를 추정하는 시스템으로 레이더의 측정 정확도는 주파수 추정에 의존한다. 이 때 기본적인 주파수 추정기법인 FFT 를 사용할 경우 해상도의 한계가 존재하게 되어 이
유경우․공승현
를 극복하기 위한 초고해상도 기법들이 개발되어 왔다. 최근에는 특정 신호 환경에 대해 효율적인 데 이터 추출이 가능한 Finite Rate of Innovation (FRI) 라는 새로운 초고해상도 기법이 개발되어 왔다.3,4) 본 논문에서는 FRI 기법을 FMCW 레이더에 적용하 고 기본적인 주파수 추정 기법인 FFT와 기존에 연 구되어 왔던 초고해상도 기법을 적용하였을 때와 비교하여 성능을 분석한다.
2. FMCW 레이더 2.1 FMCW 레이더 신호 모델링
FMCW 레이더는 글자 그대로 Frequency Modu- lated Continuous Wave를 사용하는 레이더로 아래와 같이 송신부(Transmitter)와 수신부(Receiver)로 이루 어져 있다.5)
Fig. 1 Block diagram of FMCW radar
송신부에서는 Voltage-Controlled Oscillator (VCO) 로부터 생성된 주파수 변조된 신호를 안테나를 통 하여 송신하는데 송신부에서 송신하는 신호는 아래 와 같이 표현이 가능하다.
exp
(1) 위 식에서 는 송신신호의 크기이고
는 송신 신호의 주파수이다. FMCW 레이더에서는 주파수
가 시간에 따라 변화하므로 Fig. 2와 같이 표현할 수 있다.본 연구에서는 삼각파 형태로 주파수가 변화하는 FMCW 신호를 고려했다. 위에서 은 주파수 변조 주기 (스윕 주기)를 나타내고 는 주파수변조 폭을 의미한다.
를 과 에 대해서 표현하면 식 (2)와 같다.Fig. 2 Frequency change of transmitted signal with time
exp
≤ ≤
exp
≤
2.2절은 위와 같이 모델링된 신호를 이용하여 FMCW 레이더가 어떻게 물체의 거리와 속도를 측 정하는 지에 대해 다룬다.2.2 FMCW 레이더 신호를 이용한 속도 및 거리 측정
앞 절의 FMCW 레이더 블록 다이어그램을 보면 알 수 있듯이 물체로부터 반사된 송신 신호는 안테 나를 통해 수신부로 수신된다. 그 후 수신된 신호는 송신부에서 생성된 신호와 곱해진 후에 저역 통과 필터(Low pass filter)를 거친다. FMCW 레이더는 이 과정을 통하여 물체의 거리와 속도를 구하게 된다.
본 절에서는 기본적인 FMCW 레이더의 거리 및 속 도 계산에 대해 서술한다.6,7)
먼저 송신신호
와 물체에 반사되어
만큼 지연된 수신신호
를 그래프로 나타내면 아래 Fig. 3과 같다.
는 신호의 왕복시간으로 레이더와 물체 사이의 거리를 로 놓았을 때
로 표현할 수 있다.
Fig. 3 Transmitted signal and received signal of FMCW radar (2)
FMCW 레이더에서의 1D FRI (Finite Rate of Innovation) 초고해상도 기법 적용 및 분석
≤ ≤
에서 송신신호
와 수신신호
를 수식으로 표현하면 아래와 같다.
exp
exp
위에서
는 수신 신호의 위상을 위미한다. 블록 다이어그램의 순서와 같이 송신 신호와 수신신호를 곱한 뒤에 저역통과 필터를 거치면 식 (4)와 같이 표 현할 수 있다.
exp
수식에서 알 수 있듯이
에서
는 상수, 즉 위상이므로 주파수 성분은 일정한 값인
만 남게 된다. 이 주파수는 비트 주파수라고 부르며
로 표기한다.
에서와 모두 레이더의 사양에 의해 고정된 값이기 때문에
값에 의해서만
가 결정되고 결과적으로
추정을 통해 아래 수식과 같이 거리를 계산할 수 있다.
(5) 다음으로 레이더와 물체간의 상대속도에 의해 도 플러 주파수
가 생겼을 경우에 대해 송신 신호와 수신신호를 그래프로 나타내면 Fig. 4와 같다.그림에서 알 수 있듯이 송신신호의 주파수는 이 전과 차이가 없지만 수신신호는 도플러 주파수
만큼의 오프셋을 갖는다. 즉, 이 경우에는
가 약
간격으로
에 더해지고 빼지면서 두 개의
가 나타난다. Fig. 3과 Fig. 4의 하단은
유무에 따른
차이를 보여준다.Fig. 4 Transmitted signal and received signal of FMCW radar in the presence of Doppler frequency
는
가 존재하지 않을 경우의 비트주파수를 나타낸다. 앞서
가 없을 경우 거리는
와 같이 계산되었다. 이를
가 있을 경우에 대해 적 용하면 식 (6)과 같이 나타낼 수 있다.
(6) 위에서
와
는 각각
,
이다. 또한
가 있는 경우는 상대속도가 존재한다 는 의미이므로 도플러 공식을 이용하여 속도를 계 산하면 다음과 같다.
.∴
(7) 앞서 보았듯이 비트 주파수는 FMCW 레이더 시 스템에서 거리 및 속도 측정과 직결된 값인 것을 알 수 있다. 따라서 본 연구에서는 1D FRI를 적용하여 높은 정확도로 비트 주파수를 추정하는 것을 목적 으로 한다.
3. FRI 기법
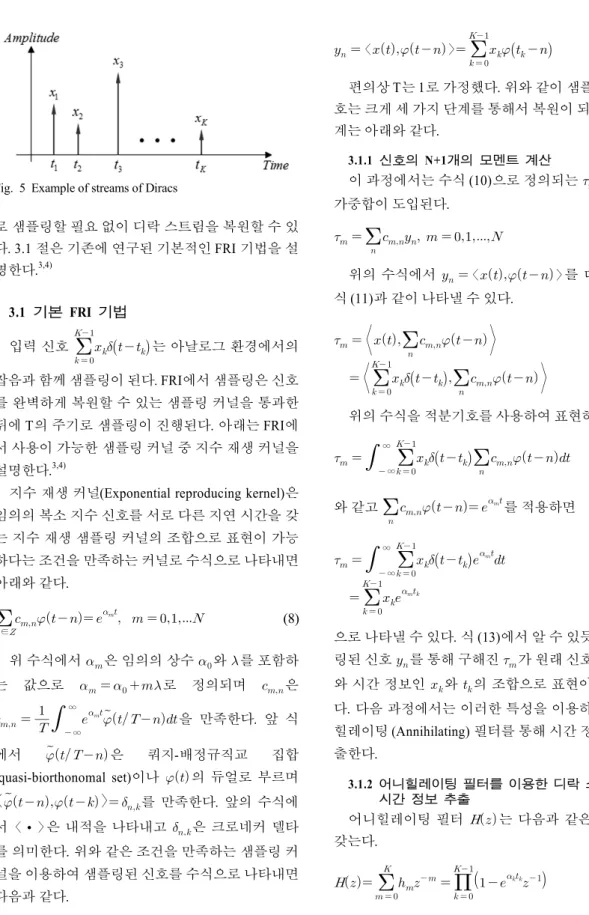
FRI는 일정 시간 내에서 유한개의 자유도가 존재 하는 신호를 일컫는 말로 FRI 신호의 예로는 Fig. 5 과 같은 디락 스트림(streams of Diracs)이 있다.3,4)
Fig. 5에서 알 수 있듯이 디락 스트림은 불규칙적 인 디락 델타 함수들로 이루어진 신호이고 이를 기 존 샘플링 기법을 통해서 샘플링을 실행하고 다시 복원을 하려면 무한개의 샘플수가 필요하다. 하지 만 FRI 개념에 입각해서 디락 스트림의 K개의 시각 정보와 K개의 크기 값 계산이 가능하다면 무한 대 (3)
(4)
Kyungwoo Yoo․Seung-Hyun Kong
Fig. 5 Example of streams of Diracs
로 샘플링할 필요 없이 디락 스트림을 복원할 수 있 다. 3.1 절은 기존에 연구된 기본적인 FRI 기법을 설 명한다.3,4)
3.1 기본 FRI 기법 입력 신호
는 아날로그 환경에서의 잡음과 함께 샘플링이 된다. FRI에서 샘플링은 신호 를 완벽하게 복원할 수 있는 샘플링 커널을 통과한 뒤에 T의 주기로 샘플링이 진행된다. 아래는 FRI에 서 사용이 가능한 샘플링 커널 중 지수 재생 커널을 설명한다.3,4)지수 재생 커널(Exponential reproducing kernel)은 임의의 복소 지수 신호를 서로 다른 지연 시간을 갖 는 지수 재생 샘플링 커널의 조합으로 표현이 가능 하다는 조건을 만족하는 커널로 수식으로 나타내면 아래와 같다.
∈
(8)위 수식에서
은 임의의 상수
와
를 포함하 는 값으로
로 정의되며
은
∞∞
을 만족한다. 앞 식 에서
은 쿼지-배정규직교 집합 (quasi-biorthonomal set)이나
의 듀얼로 부르며〈 〉
를 만족한다. 앞의 수식에 서〈∙〉
은 내적을 나타내고
은 크로네커 델타 를 의미한다. 위와 같은 조건을 만족하는 샘플링 커 널을 이용하여 샘플링된 신호를 수식으로 나타내면 다음과 같다.
〈 〉
(9) 편의상 T는 1로 가정했다. 위와 같이 샘플링된 신 호는 크게 세 가지 단계를 통해서 복원이 되고 각 단 계는 아래와 같다.3.1.1 신호의 N+1개의 모멘트 계산
이 과정에서는 수식 (10)으로 정의되는
이라는 가중합이 도입된다.
(10) 위의 수식에서
〈 〉
를 대입하면 식 (11)과 같이 나타낼 수 있다.
〈
〉
〈
〉
위의 수식을 적분기호를 사용하여 표현하면
∞∞
(12)와 같고
를 적용하면
∞∞
으로 나타낼 수 있다. 식 (13)에서 알 수 있듯이 샘플 링된 신호
를 통해 구해진
가 원래 신호의 크기 와 시간 정보인
와
의 조합으로 표현이 가능하 다. 다음 과정에서는 이러한 특성을 이용하여 어니 힐레이팅 (Annihilating) 필터를 통해 시간 정보를 추 출한다.3.1.2 어니힐레이팅 필터를 이용한 디락 스트림의 시간 정보 추출
어니힐레이팅 필터
는 다음과 같은 특성을 갖는다.
(14)(11)
(13)
Application and Analysis of 1D FRI (Finite Rate of Innovation) Super-resolution Technique in FMCW Radar
즉, 어니힐레이팅 필터는 디락 스트림의 시간 정 보와 관련된 값을 영 값으로 갖는 필터로
를
,
로 놓으면 식 (15) 와 같이 표현이 가능하다.
*
(15)결과적으로 임의의 디락 스트림에 대해
*
이기 위해서는
이 되어야 하므로
,
일 때
와 일치하는 것을 알 수 있다. 즉,
*
을 행렬식으로 표현하면,
⋮ ⋱ ⋮
⋯
⋯
⋮
(16)이 되고
⋯
는 행렬
⋮ ⋱ ⋮
⋯
⋯
의 영벡터가 되고 영점을 구함으로써 디락 스트림의 시간 정보를 구할 수 있다. 위 식에서 은
≥
을 만족한다.3.1.3 반데몬드 (Vandermonde) 시스템을 이용한 디락 스트림의 크기값 추출
디락 스트림의 크기는 이전 단계에서 구해진 시 간 정보를 이용하여 추출한다. 본 단계에서는 기본 식
을 이용한다. 앞의 기본식을
에 대해서 행렬식으로 나타내면 식 (17)과 같다.
⋮ ⋯ ⋱ ⋮
⋯
⋮
⋮
(17)즉, 디락 스트림에서 k번째 디락 델터 함수의 크 기
는
⋮ ⋯ ⋱ ⋮
⋯
의 역행렬을 구함으로써 얻을 수 있다.
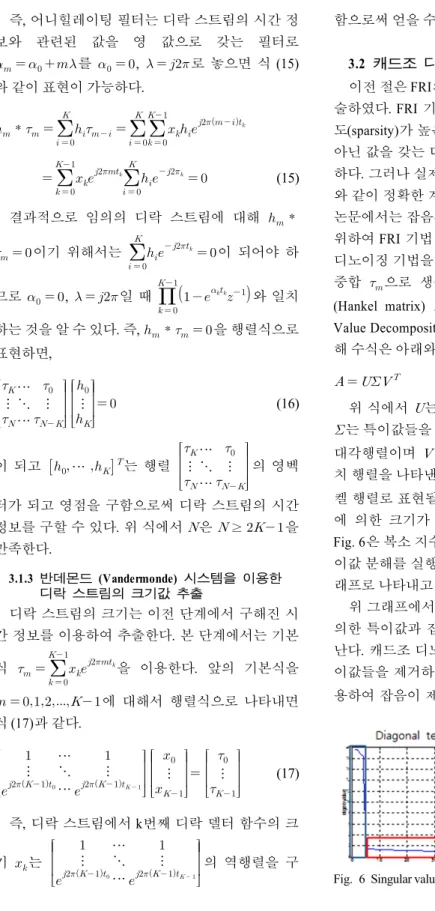
3.2 캐드조 디노이징 (Cadzow Denoising) 이전 절은 FRI의 기본적인 알고리즘에 대해서 서 술하였다. FRI 기법은 앞서 서술한 것처럼 성김 정 도(sparsity)가 높은, 즉 0이 매우 많고 소수개의 0이 아닌 값을 갖는 디락 스트림에 대해서 활용이 가능 하다. 그러나 실제 신호 환경에서는 잡음에 의해 이 와 같이 정확한 계산이 불가능해진다. 이에 따라 본 논문에서는 잡음환경 하에서 FRI 기법 성능 향상을 위하여 FRI 기법 적용 전 잡음 제거 기법인 캐드조 디노이징 기법을 적용한다.8) 캐드조 디노이징은 가 중합
으로 생성된 ×
의 크기의 헨켈 행렬 (Hankel matrix) 를 특이값 분해(SVD ; Singular Value Decomposition)함으로써 실행된다. 특이값 분 해 수식은 아래와 같이 표현이 가능하다.
(18)위 식에서 는
×
의 크기를 갖는 행렬이고,
는 특이값들을 대각 원소로 갖는 ×
의 크기의 대각행렬이며 는 유니터리 행렬로 의 켤레전 치 행렬을 나타낸다.
는 복소 지수 신호이므로 헨 켈 행렬로 표현될 경우 특이값이 커지게 되고 잡음 에 의한 크기가 작은 특이값과의 차이가 커진다.Fig. 6은 복소 지수 신호로 헨켈 행렬을 생성하여 특 이값 분해를 실행했을 때 얻은
의 대각 원소를 그 래프로 나타내고 있다.위 그래프에서도 알 수 있듯이 복소 지수 신호에 의한 특이값과 잡음에 의한 특이값이 크게 차이가 난다. 캐드조 디노이징에서는 잡음에 의한 작은 특 이값들을 제거하고 얻은 새로운 대각행렬
′
을 이 용하여 잡음이 제거된 ′
′
을 계산하고 잡Fig. 6 Singular values of complex exponential signal and noise
유경우․공승현
음이 제거된 새로운
을 얻는다. 하지만 잡음이 심 한 환경에서는
이 어느 정도 잡음이 제거 되었는 지를 파악한 뒤 다시 캐드조 디노이징을 할지 결정 해야 한다. 본 논문에서는 아래 수식을 통하여 캐드 조 디노이징의 반복 실행 여부에 대해 결정한다. ∥
∥
(19)위의 수식에서
는 가장 작은 특이값이고∥
∥
는 캐드조 디노이징을 실행하여 잡음이 제거 된
의 놈 (norm)을, 마지막으로
는 한계값을 의 미한다. 본 연구에서
는
으로 설정이 되었다.위 수식은 사전에 정해진 한계값
보다
∥
∥
가 작다면 캐드조 디노이징을 종료하고 그렇지 않으면 반복해야 함을 의미한다.
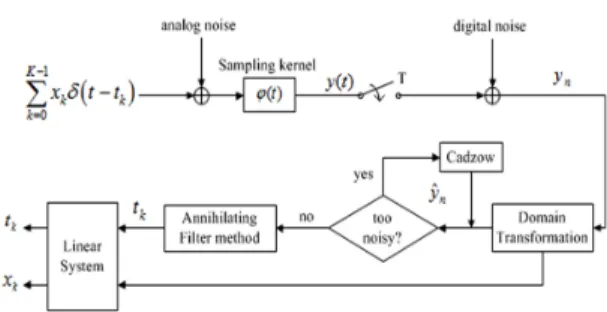
지금까지 설명한 FRI 기법을 블록 다이어그램으 로 나타내면 Fig. 7과 같이 표현할 수 있다.
Fig. 7 Block diagram of FRI technique
4. 역방향 FRI 기법
앞서 설명한 FRI 기법은 시간 영역에서 디락 스트 림의 시간 정보를 추출하는 과정으로 본 연구에서 추출해야 하는 값은 복소 지수 신호의 주파수 값이 라고 할 수 있다. 이에 따라 본 논문에서는 주파수 추출을 위한 변형된 FRI 기법을 제안한다.
Fig. 8은 변형된 FRI 기법의 블록 다이어그램을 나타낸다. 기존 FRI 기법과 다른 부분은 입력신호가 디락 스트림이 아니라 가중합인
라 는 점이다. 가중합 수식을 보면 알 수 있듯이 K개의 복소 지수 신호인 것을 알 수 있고 기존 FRI 기법은Fig. 8 Block diagram of reverse directional FRI technique
시간 정보 추출을 위해 구해진 반면 본 기법에서는 주파수 정보 추출을 위해 구한 것을 알 수 있다. 즉,
을 추출하는 것이 목적이었던 기존 FRI 기법과는 달리
를 추출하는 것을 목적으로 하므로 해석하 는 방향이 반대가 되었다고 할 수 있다. 이에 따라 본 논문에서는 이와 같이 처리되는 FRI 기법을 역방 향 FRI (RD FRI ; reverse directional FRI)로 명명한다.5. 시뮬레이션
시뮬레이션은 FMCW 레이더 신호 환경에서 역 방향 FRI의 주파수 추정 및 거리 추정 성능을 평가 하고 분석하기 위해 기본적인 주파수 추정 기법인 FFT와 기존 초고해상도 기법인 MUSIC과 매트릭스 펜슬(matrix pencil) 기법들과 비교함으로써 진행되
었다.9,10) 상용 FMCW 레이더 환경을 고려한 시뮬레
이션 환경은 Table 1과 같다.5) 표 1에서 최대 비트주 파수는 일반적인 차량용 FMCW 레이더의 최대 인 식 거리가 150m 안팎이라는 것과 스윕 주기와 대역 폭간의 관계를 이용하였을 때 600kHz로 계산되었 다. 또한 시뮬레이션은 -25dB부터 20dB까지 1.5dB 간격으로 SNR을 변화시켜가며 진행하였고 SNR마 다 1000회를 반복하여 얻어진 비트주파수의 Root Mean Square Error (RMSE)와 비트주파수를 통해 계 산된 거리의 RMSE를 결과값으로 나타내었다.
Table 1 Simulation environments
시뮬레이션 파라미터 값
중심 주파수
주파수 변조폭
스윕 주기
최대 비트주파수
샘플링 주파수
샘플 개수
,
관측 시간
,
신호 개수 1, 2
FMCW 레이더에서의 1D FRI (Finite Rate of Innovation) 초고해상도 기법 적용 및 분석
(a) Frequency estimate of FFT
(b) Frequency estimates of Super-Resolution techniques
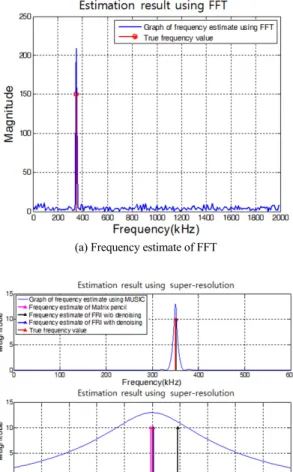
Fig. 9 Frequency estimates of several frequency estimationtechniques
Fig. 9는 샘플 개수가 128개일 경우 SNR이 10dB 인 환경에서 비트주파수가 350kHz일 때를 한 예로 들었을 때 각 주파수 추정 기법의 결과에 대해 나타 내고 있다.
Fig. 9(a)는 FFT의 결과를 나타내고 Fig. 9(b)는 MUSIC, 매트릭스 펜슬, 역방향 FRI 기법의 결과를 나타낸다. FFT는 신호의 주파수 성분에서 최대값이 출력되면서 주파수를 정확히 추정하는 것을 알 수 있고 MUSIC 또한 의사 스펙트럴 방법(pseudo-spec- tral method)을 기반으로 함에 따라 연속적으로 값이 존재하고 FFT와 마찬가지로 신호의 주파수 성분에 서 최대값이 계산되는 것을 알 수 있다. FFT와 MUSIC과는 달리 매트릭스 펜슬과 역방향 FRI의 추 정값과 같은 경우에는 기법 특성상 가정한 신호의
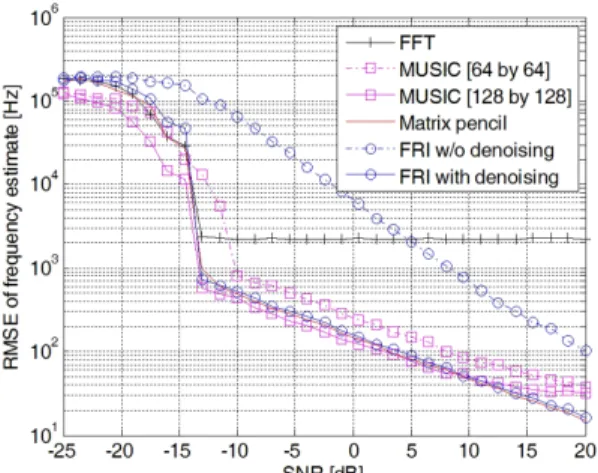
(a) RMSE of beat frequency estimate with 128 samples for 1 signal
(b) RMSE of distance estimate with 128 samples for 1 signal
Fig. 10 RMSE of beat frequency estimate and distanceestimate with 128 samples for 1 signal
Fig. 11 RMSE of beat frequency estimate with 128 samples for 2 signals
Kyungwoo Yoo․Seung-Hyun Kong
Fig. 12 RMSE of beat frequency estimate with 256 samples for 1 signal
Fig. 13 RMSE of beat frequency estimate with 256 samples for 2 signals
개수만큼만 출력되고 거의 정확하게 주파수를 추정 했다. 그러나 캐드조 디노이징을 하지 않은 역방향 FRI는 눈에 띄게 성능이 저하되는 것을 알 수 있다.
아래에 나올 시뮬레이션 결과는 신호의 개수 K와 샘플 개수 그리고 관측 시간을 변화시켜 가면서 주 파수 추정 기법들로 추정한 비트주파수의 RMSE와 거리의 RMSE 값을 비교한 그래프이다. 식 (5)에서 알 수 있듯이 거리의 RMSE 값은 주파수의 RMSE 값에만 관련이 있으므로 샘플 개수가 128개이고 신 호의 개수가 1개일 때에 대한 시뮬레이션에서만 도 시하고 이외의 시뮬레이션 환경에서의 거리 RMSE 그래프는 생략하였다. 또한 본 논문에서는 두 타겟
의 거리 간격, 즉, K=2일 경우 두 신호의 주파수 차 이는 FFT를 이용하여 추정했을 때 두 신호의 주파 수를 충분히 분해가 가능한 경우에 한해서 시뮬레 이션을 진행하였다.
먼저, 주파수를 추정하는 해상도가 관측시간의 역수에 비례하는 FFT의 경우, SNR이 높아지더라도 주파수 추정 해상도에 한계가 있어 RMSE 값이 감 소하지 않는 현상이 발생했다. 이러한 FFT 기법의 한계는 초고해상도 기법의 필요성을 재확인 할 수 있는 결과라고 할 수 있다. 초고해상도 기법에서는 매트릭스 펜슬과 캐드조 디노이징을 적용한 역방향 FRI 기법은 신호 한 개의 경우 SNR이 25dB 이상으 로 높을 때 거리 추정치의 RMSE가 거의 센티미터 이하 레벨로 떨어지는 것을 알 수 있었고 캐드조 디 노이징을 하지 않은 역방향 FRI 기법은 상대적으로 낮은 성능을 보였다. 또한 100Hz로 수색 간격을 지 정한 MUSIC의 경우 상관 행렬의 크기를 크게 할수 록 더 좋은 성능을 보였으나 매트릭스 펜슬과 캐드 조 다노이징을 한 역방향 FRI 기법과 비교하여 성능 이 떨어지는 것을 알 수 있었다. 이 외에도 초고해상 도 기법들의 공통적인 특징으로는 특정 값 이상의 SNR에서는 RMSE 값이 급격히 낮아지는 것을 알 수 있다.
또한 모든 기법들은 추정하는 신호의 개수가 많 아질수록 RMSE 값이 커지는 것을 확인할 수 있었 다. 결과적으로 모든 기법들은 SNR이 높을수록, 신 호의 개수가 적을수록, 추정 시 사용되는 샘플수가 많을수록, 관측시간이 길어질수록 더 좋은 성능을 보였다.
6. 결 론
최근 지능형 교통 시스템이나 자율주행과 같은 지상교통 시스템의 발전으로 레이더가 많이 사용됨 에 따라 레이더의 성능 향상이 매우 중요해졌다. 차 량용으로 많이 사용되는 FMCW 레이더는 비트주파 수를 추정함으로써 거리나 속도를 측정하는데 초고 해상도 기법을 사용하면서 정확한 주파수 추정이 가능해졌다. 본 논문에서는 새로운 초고해상도 기 술인 FRI를 FMCW 레이더 시스템에 적합하게 알고 리즘을 수정하여 적용했고 해당 시뮬레이션 환경에
Application and Analysis of 1D FRI (Finite Rate of Innovation) Super-resolution Technique in FMCW Radar
서 SNR이 높을 때 거리 추정치의 RMSE가 센티미 터 레벨 이하로 줄어드는 것을 확인했으며 이 결과 는 기본적인 주파수 추정기술인 FFT와 비교하여 수 십배에서 100배 가량 높은 정확도를 보이는 것을 확 인했다. 또한 기존 초고해상도 기법과 비교하여 두 배 정도의 향상된 정확도를 갖거나 비슷한 성능을 보이는 것을 시뮬레이션 결과를 통해 확인하였다.
후 기
본 연구는 국토해양부 위성항법 기반 교통인프라 기술개발의 연구비지원(06교통핵심A03)에 의해 수 행되었습니다.
References
1) D. H. Kim and P. D. Cho, “Application and Perspective on Automotive Radar Technology,”
Electronics and Telecommunications Trends, Vol.18, No.1, pp.33-41, 2003.
2) S. Clark, Autonomous Land Vehicle Navigation Using Millimeter Wave Radar, Ph. D. Disser- tation, University of Sydney, Sydney, 1999.
3) P. Dragotti, M. Vetterli and T. Blu, “Sampling Moments and Reconstructing Signals of Finite Rate of Innovation: Shannon Meets Strang-fix,”
IEEE Trans. Signal Process, Vol.55, No.5, pp.1741-1757, 2007.
4) M. Vetterli, P. Marziliano and T. Blu, “Sampling Signals with Finite Rate of Innovation,” IEEE Trans. Signal Process, Vol.50, No.6, pp.1417- 1428, 2002.
5) E. G. Hyun, S. D. Kim, C. H. Park and J. H.
Lee, “Design of 77GHz FMCW Automotive Radar,” KSAE Annual Conference Proceedings, pp.535-539, 2008.
6) B. R. Mahafza, Radar Systems Analysis and Design Using MATLAB, Chapman & Hall/CRC, London, pp.126-129, 2005.
7) D. D. Li, S. C. Luo and R. M. Knox, “Milli- meter-wave FMCW Radar Transceiver / Antenna for Automotive Applications,” Appl. Microwave Wireless, Vol.11, No.6, pp.58-68, 1999.
8) J. Cadzow, “Signal Enhancement - A Composite Property Mapping Algorithm,” IEEE Trans.
Acoustic, Speech. and Signal Process, Vol.36, No.1, pp.49-62, 1988.
9) R. O. Schmidt, “Multiple Emitter Location and Signal Parameter Estimation,” IEEE Trans.
Antennas and Propagat, Vol.34, No.3, pp.276- 280, 1986.
10) T. K. Sarkar and O. Pereira, “Using the Matrix Pencil Method to Estimate the Parameters of a Sum of Complex Exponentials,” IEEE Trans.
Antennas Propagat. Mag., Vol.37, No.1, pp.48- 55, 1995.