Copyright
Ⓒ2015 KSAE / 134-01 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2015.23.1.001 Transactions of KSAE, Vol. 23, No. 1, pp.1-10 (2015)
영상 항법에서의 2D FRI (Finite Rate of Innovation) Super-resolution 기법 적용 및 분석
유 경 우․공 승 현*
한국과학기술원 조천식 녹색교통대학원
Application and Analysis of 2D FRI (Finite Rate of Innovation) Super-resolution Technique in Vision Navigation
Kyungwoo Yoo․Seung-Hyun Kong
*
The Cho Chun Shik Graduate School for Green Transportation, KAIST, Daejeon 305-701, Korea (Received 16 January 2014 / Revised 3 July 2014 / Accepted 12 August 2014)
Abstract : In urban area, since multipath and signal attenuations frequently occur due to street trees, street lights and buildings, it is difficult to obtain accurate navigation solution using GPS. As these problems also impact negatively on the INS/GPS coupled system, implementing advanced transportation systems such as autonomous navigation system and Intelligent Transportation System (ITS) become quite hard. For this reason, to alleviate deterioration of navigation system performance in urban area, direction information extraction algorithm using vision system is proposed in this paper. 2D Finite Rate of Innovation (FRI) technique is applied to extract lane edges. The proposed technique is simulated using road images and feasibility of proposed technique is analyzed through the simulation results.
Key words : Edge extraction(에지 추출), FRI, Navigation system(항법 시스템), Vision navigation(영상 항법)
1. 서 론
1)
항법 시스템은 동체의 위치나 속도, 자세 등을 탐 지하여 목적지까지 올바르게 이동할 수 있도록 도 와주는 시스템으로 대표적인 항법 시스템으로는 GPS와 INS가 있다. 하지만 가로수, 가로등 및 빌딩 이 존재하는 도심지역의 경우 다중경로 신호나 신 호 약화가 일어나 GPS을 통한 정확한 측위가 어렵 다.
1)
이는 INS의 경우 시간이 지남에 따라 항법오차 가 누적되는 단점을 보완하고자 개발된 INS/GPS 결 합 시스템에서 GPS 측정값의 신뢰도저하를 야기하 므로 INS/GPS 결합 시스템 또한 성능이 저하된다.이러한 문제점은 도심지역에서 항법 시스템의 성능 이 저하되는 것은 최근 활발히 연구되고 있는 자율
*
Corresponding author, E-mail: [email protected]
주행이나 ITS (Intelligent Transportation System)와 같 은 첨단 교통 시스템 개발에 있어 보완해야 할 사항 이라고 할 수 있다. 물론 레이더나 라이더를 이용하 여 차량 간이나 차량과 인프라 간의 상대 위치나 거 리를 측정하는 방식도 대두되고 있으나
2,3)
차량의 방향정보 또한 매우 중요하다. 이에 따라 본 연구에 서는 GPS나 INS/GPS 결합 시스템과 같은 항법 시스 템의 성능 저하를 보완하고자 최근에 연구된 영상 에서의 FRI 기법인 2D FRI 기법을 영상 항법에 적용 해보았다. 2D FRI 기법은 계단 에지를 추출하는 알 고리즘으로 FRI의 특성을 이용하여 낮은 해상도의 영상에서도 높은 정확도로 에지를 추출할 수 있는 특징을 갖는다.4-6)
이러한 특징은 정확한 에지 추출 을 위해서는 높은 해상도의 영상을 사용해야 했던 기존 기술의 계산량을 줄일 수 있고 결과적으로 영유경우․공승현
상 항법 알고리즘의 복잡도를 낮출 수 있다. 이에 따 라 본 논문에서는 2D FRI를 이용하여 차선의 계단 에지를 추출하고 이를 통해 방향 정보를 얻어내는 보조 알고리즘들을 제안한다. 보조 알고리즘은 차 선과 차량의 방향의 차이를 비교함으로써 차량이 올바른 방향으로 진행하고 있는지에 대한 정보를 제공한다. 본 논문의 구성은 다음과 같다. 2장에서 는 에지를 추출하는데 사용될 2D FRI 기법에 대해 서 설명하고 차량의 방향 정보 추출을 위해서 필요 한 보조 기법을 3장에서 설명한다. 4장에서는 방향 정보를 추출하는 알고리즘에 대해서 설명한다. 5장 에서는 제안된 기법이 기존의 실제 시스템에 적용 가능성이 있는지를 판단하기 위해 시뮬레이션을 진 행하고 6장에서 결론짓는다.
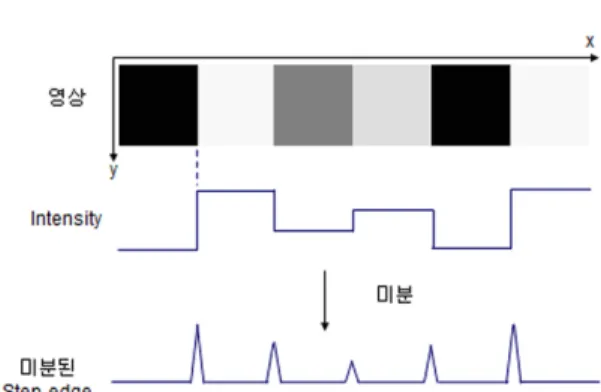
2. 2D FRI (Finite Rate of Innovation) 2D FRI는 디락 스트림(streams of Diracs)과 같이 성김 정도(sparsity)가 높은 신호를 효과적으로 샘플 링하고 복원하는 1D FRI기법을 2D로 확장시켜 영 상에서의 계단 에지를 추출하는 기법이다. 아래 Fig. 1 은 일반적인 계단 에지를 나타낸다.
7)
편의를 위해 x 방향으로는 하나의 픽셀, 즉 1차원 의 검은색과 흰색으로 이루어진 영상으로 가정했 다. 위 그림에서 알 수 있듯이 검은색과 흰색의 강도 의 차이는 255이므로 강도에 따라 얻은 계단 에지는 검은색과 흰색의 경계면에서 유닛 계단 에지와 같 이 나타나지는 것을 알 수 있다. 2D FRI는 Fig. 2와 같이 계단 에지의 미분이 델타 함수인 성질을 이용 한다.
위의 델타 함수 값이 0이 아닌 위치는 FRI 기법을 통해 계산이 되고 이를 이용하여 계단 에지 추출이
Fig. 1 Example of step edge
Fig. 2 Step edge and differentiated step egde
Fig. 3 Differentiation results in case of several step edges
가능해진다. 일반적으로 잡음이 없는 영상 환경에 서는 계단 에지가 영상 전체에서 적은 부분만 차지 하므로 Fig. 3과 같이 여러 개의 계단 에지가 있더라 도 FRI기법을 통해 추출이 가능하다.
다음은 기존 2D FRI 알고리즘을 설명한다. 2D FRI에서의 계단 에지는 아래 그림과 같이 강도 차이
,
축을 기준으로 틀어진 방향
, 마지막으로 계단 에지를 연장했을 때
축과 만나는
절편
로 표현 이 가능하다.6)
Fig. 4 Step edge function in 2D FRI
를 계단 에지 함수로 정의하고
sincos
와
를 각각 에지의 노말 벡터와 임의의 점
에서의 벡터로 정의하 면
는
과
로 아래와 같이 표현할 수 있다.
〈
〉
(1)영상 항법에서의 2D FRI (Finite Rate of Innovation) Super-resolution 기법 적용 및 분석
위 식에서
는 유닛 계단 함수로 아래의 성질 을 갖는다.
≥
(2) 위와 같이 정의된
가 2D B-spline 샘플링 커 널
을 통해 샘플링이 된다고 가정하면 〈
〉
(3) 로 나타낼 수 있다. 이와 같이 샘플링 된 계단 에지 는 앞서 말했듯이 미분이 되는데 단순 미분 수식과 샘플링 커널이 포함된 수식으로 나타낼 수 있다.
〈
〉
(4)
*
는 수정된 커널로
이
에 대해 미분되는
를 표현하기 위하여 도입되었 다. 위의 수식에서
가
와
에 대해 분리가 가능하다고 가정하고
를
과
로 표현하 면 아래와 같이 정리가 가능하다.
sin 〈 ⋅
⊗
〉
(5)위에서
⊗
는 텐서 곱 (tensor product)을 의미한다.지금까지 계단 에지 함수
로부터
가 어떻게 얻어지는지 유도했다. 다음으로 미분된 샘 플
로부터 어떻게 계단 에지 함수
를 추출하는지에 대해 서술한다. 본 논문에서는 에 대 한 미분 값에 대해서만 고려하기 때문에
축에 평행 한 계단 에지가 추출되므로 1D FRI에서와 같이 가 중합
는 아래와 같이 표현할 수 있다.
∈
(6)위의 수식에서
은 열 인덱스 (column index)이 고
는 수정된 커널
과 함께 단항식
을 복원할 수 있는 상수로
일 때 아래와 같은 관계 를 만족한다.
(7)
를
,
,
로 표현하기 위하여
에
sin 〈 ⋅
⊗
〉
(8)을 대입하고 정리하면 아래와 같다.
tan tan
(9)윗 식에서
은 ∞ ∞
로 정의되고
가 정해지면 한번만 계산되는 값으로 상수로 놓을 수 있다.
을 윗 식에 대입하면,
tan
tan tan
(10)가 되고 윗 식에서
tan
이다. 윗 식에서 알 수 있듯이
를 대입함으로써
,
,
값을 구 할 수 있다. 그러나
의 경우 부호의 모호성 (ambiguity)이 존재하게 된다. 즉
의 부호를 정하기 위해서는 인접한 두 개의 행에 대한 가중합, 즉
과
을 구하여 아래와 같이 구할 수 있다.
tan
(11)
식 (11)에서
와
은
∞
∞
식에 서
가 각각
,
을 만족시킨다고 가 정하였다.6)
지금까지는 두 개의 인접한 행에 대해서 2D FRI 를 적용하였고 아래는 개의 평행한 계단 에지를 추출하는 경우에 대해 설명한다. 개의 계단 에지 를 갖는 아래와 같이 표현할 수 있다.
6)
Kyungwoo Yoo․Seung-Hyun Kong
〈
〉
(12) 또한 어니힐레이팅 필터(annihilating filter)로 계 산하기 위하여 위의 기존의 가중합을 아래와 같이 변환한다.
tan
(13)위 식과 같이 변환된 가중합을
tan
과
로 표현하면
⋅
(14) 이 된다. 윗 식에서 ≥
이고 어니힐레이팅 필 터를 이용하여
와
를 구할 수 있다. 2D FRI의 블록 다이어그램은 아래와 같다.Fig. 5 Block diagram of 2D FRI technique
어니힐레이팅 필터를 통해 얻어진
,
,
값은 인접한 픽셀 간에 비교함으로써 값들이 같으면 두 픽셀이 같은 에지에 있는 것으로 간주하고 같지 않 으면 관련이 없으므로 에지 후보에서 제외된다. 본 연구에서는 다섯 개의 인접한 픽셀의
,
,
값이 같을 경우 에지로 간주하고 추출하였다. 추가적으 로 알고리즘의 계산량을 줄이기 위해 FRI를 적용하 기 이전에 케니 에지 검출기를 이용해 에지의 대략 적인 위치를 파악한 뒤에 FRI를 적용해 부분적으로 에지를 검출한다. 이러한 과정을 통해 FRI를 통한 에지 검출 시 계산량을 크게 줄일 수 있다.3. 방향정보 추출을 위한 보조기법 앞 장에서 설명했듯이 2D FRI는 계단 에지를 추
출하는 알고리즘이다. 그러나 실제 방향정보 계산 을 위해 사용되는 계단 에지는 가로수나 건물 및 다 른 차량의 에지가 아닌 도로 차선의 에지이므로 많 은 계단 에지로부터 도로 차선의 에지만을 추출하 는 보조 기법들이 필요하다. 본 논문에서는 세 가지 의 보조기법이 적용되었다.
3.1 , ,
의 허용오차 설정실제 영상에서는 햇빛이나 그림자 및 잡음에 인 해 원래 같은 색과 밝기를 갖는 구역이라고 하더라 도 약간의 차이가 존재한다. 이러한 차이는 2D FRI 를 이용하여 각 픽셀 별로
,
,
를 추출할 때
,
,
값이 조금씩 다르다. 때문에 이상적으로 완벽하게 같을 경우에만 같은 에지로 간주한다면 실제 영상 에서는 계단 에지의 추출이 불가능해진다. 이러한 문제를 해결하고자 인접한 픽셀 간의
,
,
을 비 교하여 계단 에지를 추출할 때 허용오차를 주어 픽 셀 간에
,
,
값이 다르더라도 계단 에지의 추출 을 가능하게 한다. 각각의 허용오차 정의는 아래와 같다.3.1.1
의 허용오차
의 허용오차는 위 그림에서 알 수 있듯이 2D FRI를 통해 계산된 인접한 두 픽셀이 같은 에지에 속한다고 판단할 때
값의 허용 가능한 차이를 의 미한다. 본 연구에서
의 허용오차는 0.001로 설정 되었다.Fig. 6 Tolerance of
3.1.2
의 허용오차
의 허용오차는
의 경우와 마찬가지로 2D FRI 를 통해 계산된 인접한 두 픽셀이 같은 에지에 속한 다고 판단할 때
값의 허용 가능한 차이를 의미한Application and Analysis of 2D FRI (Finite Rate of Innovation) Super-resolution Technique in Vision Navigation
Fig. 7 Tolerance of
다.
의 허용오차는 0.01 라디안 (radian) (0.573°)으 로 설정되었다.3.1.3
의 허용오차
의 허용오차는 앞의 두 경우와 마찬가지로 2D FRI를 통해 계산된 인접한 두 픽셀이 같은 에지에 속한다고 판단할 때
값의 허용 가능한 차이를 의 미한다. 본 연구에서는
의 허용오차를 10 픽셀로 설정했다.Fig. 8 Tolerance of
3.2 영상의 부분적 활용
추출된 계단 에지들 중에서 실제로 방향정보 계 산에 사용되는 계단 에지는 차선 에지만 관련이 있 고 빌딩이나 가로수, 사람 등에 의한 계단 에지는 불 필요할 뿐만 아니라 계단 에지 계산 시 잘못된 결과 값을 출력할 수도 있다. 이에 따라 본 기법은 이러한 빈도를 줄이고자 차선 에지가 존재하지 않는 영상 부분은 2D FRI 기법을 사용하지 않는 간단한 보조 기법을 적용한다.
Fig. 9는 차량의 블랙박스로 촬영을 했을 때 일반 적으로 보이는 영상이다. 그림에서 알 수 있듯이 블 랙박스 촬영 시 빌딩 및 가로수나 인도를 포함하는
Fig. 9 Example of partial use of images
부분이 보이고 차량 본네트를 포함하는 부분이 존 재한다. 이 두 부분은 방향정보 추출 시에 사용되는 계단 에지를 포함하지 않기 때문에 본 논문에서는 사용하지 않고 이 두부분을 제외한, 즉, 최대한 차선 만이 존재하는 영상 부분만을 사용한다. 실제로 이 보조기법이 사용될 경우에는 차량에 있는 블랙박스 의 위치에 따라서 미사용 부분이 달라지므로 차량 별로 약간의 조정이 필요하다.
3.3 계단 에지의 각도 한계값 적용
3.2를 통해서 최대한 차선의 계단 에지만을 추 출했다고 하더라도 아래 그림과 같이 기타 사물이 존재할 경우에는 그에 따른 계단 에지들이 차선 에지와 함께 추출된다. 이러한 불필요한 계단 에 지를 제거하고자 본 연구에서는 계단 에지의 각도 에 한계값을 적용한다. 이 방법은 차선으로부터 추출된 계단 에지는 일정 각도를 갖는 대각선인 반면에 이정표나 전광판과 같은 사물로부터 추출 된 계단 에지의 각도 값은 수직에 가깝거나 수평 에 가까운 차이점을 활용한다. 이를 통해 비록 불 필요한 계단 에지가 추출되었지만 각도에 제한을 두어 최대한 차선의 에지 만이 추출되도록 알고리 즘을 구현하였다. Fig. 10은 각도 한계값을 적용한 예를 보여준다.
Fig. 10 Example of applying a threshold of angle value
유경우․공승현
4. 방향정보 추출 알고리즘
지금까지 2D FRI를 이용한 계단 에지 추출과 차 선의 계단 에지 만을 걸러내는 기법에 대해 설명하 였다. 본 절에서는 최종적으로 차선의 계단 에지를 이용하여 방향정보를 추출하는 알고리즘에 대해 서 술한다.
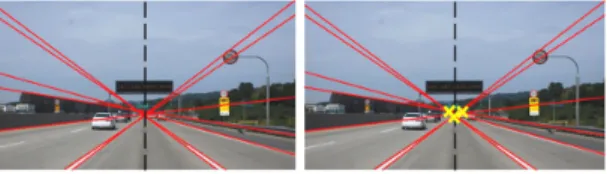
Fig. 11 Calculation of intersection points between the step edges
위 그림의 직선은 추출된 차선의 에지를 나타내 고 검은색 점선은 영상의 중앙선을 의미한다. 그림 에서 알 수 있듯이 차량의 좌우 차선에 의한 기울기 의 부호가 반대인 빨간 색 선들 간의 교점이 생기는 것을 알 수 있고 직관적으로 차량이 차선에 대해 올 바르게 진행하고 있다면 영상의 중앙선 상에서만 붉은색 선 간의 교점이 존재하는 것을 유추할 수 있 다. 하지만 실제로는 영상이 실제 환경을 완벽하게 묘사하는 것은 불가능하고 계단 에지 추출의 오차 가 존재하므로 직선들의 교점은 약간의 편차를 두 고 분포한다. 위 그림에서는 일곱 개의 계단 에지가 추출되었고 이는 각각 3개의 양의 기울기와 4개의 음의 기울기를 갖는 것을 알 수 있다. 이에 따라 총 12개의 교점이 발생하나 그림에는 편의상 대표적인 세 개의 교점을 예로 들었고 오른쪽 그림에서 X자 형태로 표현하였다. 교점의 좌표 값은 직선의 방정 식을 통해 계산이 되었고 계산된 교점은 평균과 표 준편차로 표현이 되고 아래와 같이 수식으로 나타 낼 수 있다.
(15)
이를 개의 교점에 대해서 일반화를 시키면 아
래와 같다.
(16) 아래 그림의 X자 표시는 윗 식을 통해서 계산된 교점의 평균값을 표현한다.
Fig. 12 Extraction of direction information
마지막 단계로는 방향정보 추출로 영상의 중앙선 과 영상의 중앙선의 최하단점과 교점의 평균값을 연결한 직선간의 각도 값을 계산하는 과정을 진행 한다. 이 과정을 통해 차량이 차선에 대해 얼마나 방 향이 틀어져 있는지를 알 수 있고 추출된 방향정보 의 신뢰도는 교점의 표준편차를 통해 유추가 가능 하다.
지금까지 설명한 2D FRI와 보조기법을 이용한 차 량의 방향정보 추출 알고리즘의 간단한 흐름도는 Fig. 13과 같다.
5. 시뮬레이션 결과
시뮬레이션은 2D FRI의 성능과 2D FRI를 이용한 방향정보 추출 알고리즘이 실제 영상 항법에 적용 이 가능한지의 여부를 평가하기 위하여 진행되었 다. 2D FRI의 성능은
×
영상의 해상도를 점 점 낮춤에 따라 에지 추출 결과가 어떠한지를 타 에 지 검출 알고리즘과 비교하였고 방향 정보 추출 알 고리즘의 성능은 포털 사이트의 로드뷰 서비스로부 터 대관령과 강릉 사이의 임의의 도로 영상을 통해 분석되었다. Fig. 14는 ×
영상을 샘플링 커영상 항법에서의 2D FRI (Finite Rate of Innovation) Super-resolution 기법 적용 및 분석
Fig. 13 Flow chart of directional information extraction algorithm
(a) (b)
(c) (d)
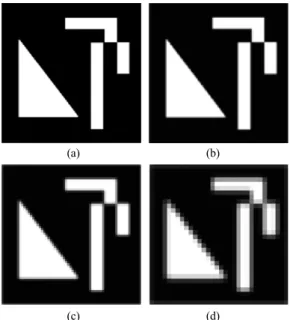
Fig. 14 Down sampled images (a)
×
, (b) ×
, (c) ×
, (d) ×
널을 통해 각각
×
, ×
, ×
, ×
로 해상도를 낮춘 영상들을 나타내고 있으며, Fig. 15 와 16은 각각 2D FRI와 허프 트랜스폼(Hough trans- form)
8,9)
을 적용하여 에지를 추출한 결과를 직선으 로 나타내고 있다.Fig. 15와 Fig. 16의 해상도가 다른 이유는 FRI의 경우 샘플링 커널에 의해 해상도가 낮아진 영상으
(a) (b)
(c) (d)
Fig. 15 Edge extraction results of 2D FRI (a)
×
, (b) ×
, (c) ×
, (d) ×
(a) (b)
(c) (d)
Fig. 16 Edge extraction results of Hough transform (a)
×
, (b) ×
, (c) ×
, (d) ×
로부터 에지를 추출한다고 하더라도 원 영상의 에 지 성분을 추출하는 반면 허프 트랜스폼의 경우에 는 해당 영상에 에지 연산자를 적용하여 얻어진 결 과를 기반으로 에지를 추출하기 때문에 추출된 에 지의 해상도 또한 저하되는 것을 알 수 있다. 시뮬레
Kyungwoo Yoo․Seung-Hyun Kong
이션 결과에서 알 수 있듯이 기존 에지 추출 기법의 성능은 영상의 해상도에 의해 의존하기 때문에 해 상도가 낮아질수록 추출된 에지가 두꺼워져 불분명 하고 부정확해지는 반면에 2D FRI는 저해상도 영상 일수록 추출되는 에지의 수가 감소하지만 기법 특 성 상 저해상도의 영상에서도 충분히 높은 정확도 의 에지를 추출하는 것을 확인 할 수 있다. 결과적으 로 기존 기법에서 높은 정확도의 에지를 추출하기 위해서는 충분히 높은 해상도의 영상을 필요로 하 는 것을 알 수 있다.
이러한 결과는 허프 트랜스폼과 2D FRI의 계산량 에도 영향을 미친다. 일반적으로 두 기법 모두
(×
픽셀 영상의 경우) 의 계산량 을 갖는 에지 연산자를 기본적으로 사용하게 된다.여기에
(
는 에지 연산자를 통해 얻어진 0이 아 닌 픽셀의 개수)에 비례하는 계산량이 추가되어 총 계산량이 얻어진다. 만약 두 기법에서 사용하는 영 상의 해상도가 같다면 거의 유사한 계산량을 갖게 된다. 그러나 앞서 서술했듯이 2D FRI는 저해상도 에서도 높은 정확도로 에지를 추출할 수 있기 때문 에 에지 연산자의 계산량이 줄어들게 되고 추가적 으로
도 줄어들기 때문에 2D FRI를 사용할 경우 허 프 트랜스폼을 사용하는 것 보다 줄어든 계산량으 로 에지를 추출할 수 있게 된다. 두 번째 시뮬레이션 은 2D FRI를 활용한 방향정보 알고리즘 성능을 목 적으로 한다. 본 연구에서는 2D FRI 실행 이전에 로 드뷰 서비스로부터 얻어진 영상의 잡음의 영향을 줄이기 위하여 영상의 이진화를 적용하였고 방향정 보는 차량이 차선에 대해 왼쪽으로 틀어져 있을 경 우의 각도
는 (-) 부호로, 오른쪽으로 틀어져 있을 경우에는 (+) 부호로 정의하였다. 또한 추출된 에지 의 교점들의 표준편차
를 x축과 y축에 대해서 각 각 계산하여 방향정보의 신뢰도를 표현하였다.시뮬레이션 결과에서 알 수 있듯이 거의 모든 영 상에서 차선의 에지만이 추출되는 것을 알 수 있었 고 영상의 중앙선과 차선의 에지들 사이의 각도 값 들의 표준편차를 통해 추정한 방향정보의 신뢰성을 표현하고 있다. 몇몇 영상에서는 하나의 차선에 여 러 개의 계단 에지가 출력이 되었는데 이는
,
,
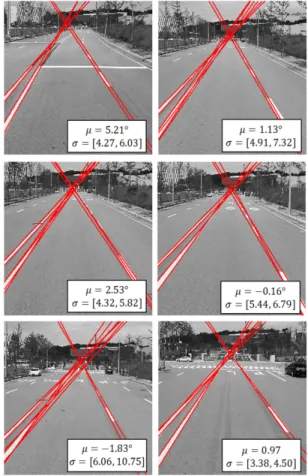
의 허용오차 적용에 따른 결과로 볼 수 있다.Fig. 17 Original images
곡선도로의 결과에 대해서는 곡선의 곡률이 작기 때문에 2D FRI를 통해 직선으로 계단 에지를 추출 하더라도 곡선 도로에 잘 부합이 되는 것을 알 수 있 다. 대부분의 교점간의 편차 또한 10 픽셀 내에 들어 옴으로써 신뢰성 측면에서도 합리적인 결과를 얻을 수 있었다. Fig. 19는 앞선 상황과는 다르게 차량이 존재하는 환경에서 알고리즘을 적용한 결과이다.
왼쪽 두 그림은 원본 영상이며 오른쪽 두 그림은 출 력된 에지와 방향 정보를 나타낸다. 결과에서 알 수 있듯이 앞에 차량이 있더라도 차량에 의한 에지는 알고리즘에 의해 제거되었고 앞 차량이 완전히 밀 착되어 차선이 가려지지 않는 한 방향정보를 얻어 낼 수 있는 것을 알 수 있었다. Fig. 20은 차량이 차선 의 방향과 크게 틀어져 있을 경우 대한 시뮬레이션 결과를 나타낸다. 왼쪽의 두 장은 각각 차량이 차선 에 대해 왼쪽과 오른쪽으로 틀어져 있는 영상이고 오른쪽 두 장은 각 영상에 방향정보 추출 알고리즘
Application and Analysis of 2D FRI (Finite Rate of Innovation) Super-resolution Technique in Vision Navigation
Fig. 18 Direction information from extracted edges
Fig. 19 Direction information from extracted edges when other vehicles exist around
Fig. 20 Direction information from extracted edges when there is quite big different direction between vehicle and lane
을 적용하여 얻은 결과를 나타낸다. 결과에서 알 수 있듯이 차량이 차선에 대해 왼쪽으로 틀어져 있는 영상의 결과는 (-) 값을 갖는 큰 각도 값이 출력되었 고 오른쪽으로 틀어져 있는 영상의 각도 값은 (+) 값 을 갖는 것을 알 수 있다.
6. 결 론
최근 카메라로부터 얻어진 영상을 이용하여 영상 내의 경계선이나 코너와 같은 특징점들을 추출하여 항법 정보를 얻는 영상항법이 대두됨에 따라 GPS나 INS와 같은 기존에 보편적으로 사용되는 항법시스 템과 함께 사용되어 항법시스템의 성능 향상을 도 모하고 있다. 이러한 상황에서 영상항법의 정확도 가 융합 항법시스템의 정확도와 관련됨에 따라 영 상항법의 가장 기초가 되는 에지 탐지의 정확도가 중요해졌다. 이에 따라 본 연구에서는 저해상도의 영상으로도 높은 정확도로 에지를 추출할 수 있는 2D FRI를 적용하여 차량과 차선 사이의 각도차이를 계산하는 알고리즘을 개발하였다. 시뮬레이션은 기 존 에지 추출 알고리즘과 2D FRI 알고리즘의 성능 차를 확인하기 위하여 영상의 해상도를 변화시켜가 면서 진행되었으며 실행한 결과 낮은 해상도의 영 상을 사용할수록 2D FRI 알고리즘이 기존 에지 추
유경우․공승현
출 알고리즘의 성능보다 좋은 것을 알 수 있었고 이 결과는 계산량 감소 측면에서도 긍정적인 결과로 생각되었다. 다른 시뮬레이션에서는 방향정보 알고 리즘의 성능 분석을 위하여 진행되었으며 차량이 진행한다고 가정한 연속된 여러 장의 영상에 대하 여 제안된 알고리즘을 적용하였다. 시뮬레이션 결 과 알고리즘을 통해 얻어진 결과 값이 실제 값과 비 교가 불가능하여 객관적으로 어느 정도의 성능을 보이는지는 정확히 알 수 없었으나 대부분의 상황 에서 차선의 계단 에지만이 성공적으로 추출되었고 이를 통해 차량의 방향정보가 계산되는 것으로부터 충분히 영상항법 시스템에 적용될 수 있을 것으로 예상된다. 향후에는 본 연구에서 제안된 알고리즘 을 보완하여 앞서 시뮬레이션 한 이상적인 환경 뿐 만이 아닌 도로의 종류나 낮이나 밤과 같은 다양한 환경에 대해서도 알고리즘을 적용해 볼 계획이다.
후 기
이 논문은 2012년도 정부(교육과학기술부)의 재 원으로 한국연구재단의 지원을 받아 수행된 연구임 (No.2012-0007173).
References
1) E. Lutz, D. Cygan, M. Dippold, F. Dolainsky and W. Papke, “The Land Mobile Satellite Communication Channel-recording, Statistics, and Channel Model,” IEEE Trans. Vehic.
Technol., Vol.40, No.2, pp.1209-1218, 1991.
2) D. H. Kim and P. D. Cho, “Application and
Perspective on Automotive Radar Technology,”
Electronics and Telecommunications Trends, Vol.18, No.1, pp.33-41, 2003.
3) D. H. Kim and P. D. Cho, “Architecture of Signal Processing Unit to Improve Range and Velocity Error for Automotive FMCW Radar,”
Transactions of KSAE, Vol.18, No.4, pp.54-61, 2010.
4) P. L. Dragotti, M. Vetterli and T. Blu, “Sampling Moments and Reconstructing Signals of Finite Rate of Innovation: Shannon Meets Strang-fix,”
IEEE Trans. Signal Process., Vol.55, No.5, pp.1741- 1757, 2007.
5) M. Vetterli, P. Marziliano and T. Blu, “Sampling Signals with Finite Rate of Innovation,” IEEE Trans. Signal Process., Vol.50, No.6, pp.1417- 1428, 2002.
6) L. Baboulaz and P. L. Dragotti, “Exact Feature Extraction Using Finite Rate of Innovation Principles With an Application to Image Super- resolution,” IEEE Trans. Image Process., Vol.18, No.2, pp.281-298, 2009.
7) R. C. Gonzalez and R. E. Woods, Digital Image Processing, 3rd Edn., Prentice-Hall, Englewood Cliffs, NJ, pp.722-727, 2002.
8) P. V. C. Hough, Method and Means for Recog- nizing Complex Patterns, U. S. Patent 3 069 654, 1962.
9) R. O. Duda and P. E. Hart, “Use of the Hough Transformation to Detect Lines and Curves in Pictures,” Communications of the ACM 15, Vol.15, No.1, pp.11-15, 1972.