CopyrightⒸ2014 KSAE / 131-17 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2014.22.5.126 Transactions of KSAE, Vol. 22, No. 5, pp.126-135 (2014)
V2X 및 환경 센서 융합 기반 교차로 안전 시스템 알고리즘 개발
박 만 복1,2)․이 상 현2)․전 시 범2)․기 석 철2)․김 정 범3)․기 창 돈3)․김 규 원3)․이 경 수*3)
서울대학교 지능형융합시스템학과1)․만도 전자개발3팀2)․서울대학교 기계항공공학부3)
Development of Control Algorithm for Intersection Safety System Using the Fusion of V2X and Environmental Sensors
Manbok Park1,2)․Sanghyun Lee2)․Sibum Jun2)․Seokcheol Kee2)․Jungbeom Kim3)․ Changdon Kee3)․Kyuwon Kim3)․Kyongsu Yi*3)
1)Department of Intelligence Convergence System, Seoul National University, Seoul 151-742, Korea
2)Electronics Development Team 3, Mando Corporation, 21 Pangyo-ro, 255 Beon-gil, Bundang-gu, Seongnam-si, Gyeonggi 463-400, Korea
3)School of Mechanical and Aerospace Engineering, Seoul National University, Seoul 151-742, Korea (Received 10 April 2014 / Revised 17 April 2014 / Accepted 17 April 2014)
Abstract : This paper describes the development and verification of control algorithms for V2X and environmental sensor integrated intersection support and safety systems. The objective of the research is to develop core technologies for effective fusion of V2X and environmental sensors and to develop new safety function for intersection safety. One of core technologies is to achieve the improvement of GPS accuracy, and the other is to develop the algorithm of a vehicle identification which matches all data from V2X, vehicle sensors and environmental sensors to specific vehicles.
A intersection optimal pass (IOP) algorithm is designed based on these core technologies. IOP recommends appropriate speed to pass the intersection in the consideration of traffic light signal and preceeding vehicle existence. Another function is developed to prevent a collision avoidance when car crash caused by traffic violation of surrounding vehicles is expected. Finally all functions are implemented and tested in three test vehicles. It is shown that IOP can support convenient and comfortable driving with recommending optimal pass speed and collision avoidance algorithm can effectively prevent collision caused by traffic sign violation of surrounding vehicles.
Key words : Intersection safety system(교차로 안전 시스템), Intersection optimal pass(교차로 최적 통과), Intersection collision avoidance(교차로 충돌 회피), V2X-based safety system(차량 간 통신 기반 안전 시스템), V2X and ADAS sensor integrated system(V2X 및 ADAS 통합 시스템)
Nomenclature1) S : distance, m
V : velocity, m/s a : acceleration, m2/s
Veh : relative vehicle position, m TTI : time-to-intersection, sec
*Corresponding author, E-mail: [email protected]
TTC : time-to-collision, sec IOP : intersection optimal pass GPS : global positioning system ADAS : advanced driver assistance system CEP : circular error probable, m FKP : Flachenkorrekturparameter
V2X : vehicle-to-vehicle and vehicle-to-infrastructure RTCM : radio commission for maritime services
V2X 및 환경 센서 융합 기반 교차로 안전 시스템 알고리즘 개발
Subscripts
red, green : traffic light color red and green acc, dec : vehicle acceleration, and deceleration Target : target value
Obj : object vehicle value Out : outer threshold value 0,1,2 : vehicle number
1. 서 론
교차로에서의 사고가 아직도 전체 교통사고의 상 당 부분을 차지하고 있다.1) 연구에 따르면 1990년에 서 2007년까지의 조사 대상에서 사망의 경우 4.8%, 부상의 경우 14.4%로 상당히 높은 점유율을 차지하 고 있음을 알 수 있다. 이에 교차로 교통사고 저감을 위한 다양한 연구들이 진행되고 있다.2-6) BMW의 경 우 좌회전 시 사고를 방지하는 교차로 충돌 방지 시 스템(Intersection Anti-crash system)을 개발하였다.7) 이 기술은 주로 카메라와 레이져 센서를 이용한 것 으로 감지 범위에 제약을 가지고 있다. Volvo 또한 유사한 개념의 환경 센서 기반 교차로 안전 시스템 을 개발하였다.8) RITA(Research and Innovation Tech- nology Administration)에서는 차량 간 통신을 이용 하여 정지 신호나 신호 위반의 경우 사고를 예방하 기 위한 기능들을 개발하였다.9,10) 그러나 위치 정보 의 정확성을 확보하기 위해서 고가의 고정확성 지 원 GPS를 적용하였기에 양산성이 부족하다고 할 수 있다. V2X 기술 등을 이용한 다양한 방법으로 교차 로 안전에 대한 연구들이 진행되고 있다.4-6) 이와 같 이 다양한 연구가 진행되고 있으나 환경 센서에 의 존하거나 통신만을 의지하거나 또는 고가의 GPS를 적용하는 등 양산을 전제로 한 연구는 아직 미약한 것으로 사료된다.
따라서 본 연구에서는 V2X와 환경 센서의 장점 을 활용하고 두 단점을 보완하여 개선된 교차로 지 원 및 사고 방지 알고리즘을 개발하고자 한다. 또한 저가의 GPS를 적용하는 대신에 정확도 개선을 위한 알고리즘을 적용하여 교차로 안전 시스템에 적용될 수 있는 수준까지 개발하고자 한다. V2X와 통신 기 술의 융합을 위해 필요한 요소 기술 개발을 진행하
고 이를 바탕으로 교차로 운전 지원 및 사고 방지 시 스템의 알고리즘을 개발하였다. 개발된 알고리즘의 검증을 위해 3대의 시험 차량을 제작하고 알고리즘 의 유효성을 검증하였다.
2장에서는 시스템 구성 및 전제 알고리즘 구조를 소개한다. 3장에서는 V2X와 환경 센서의 융합을 위 한 필수 요소 기술 개발에 대해 논한다. 4장에서는 교차로 지원 및 사고 방지 시스템의 알고리즘 개발 에 대해 논한다. 5장에서는 실차 시험을 통한 검증 을 수행한다. 마지막으로 6장에서 결론을 맺는다.
2. 시스템 및 전체 알고리즘 구성 본 연구에서 사용된 시험 차량 및 교차로 신호등 시스템 및 제어기 등의 시스템을 소개한다. 또한 전 체적인 교차로 안전 시스템의 제어 알고리즘의 구 조에 대해서도 논한다.
2.1 시스템 구성
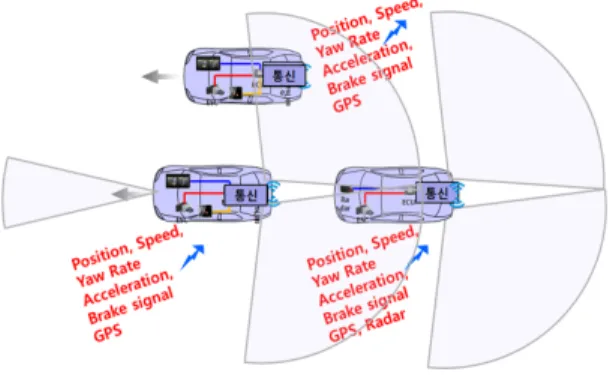
V2X 통신 단말기는 802.11p를 지원하는 모뎀을 적용하였다. 차량과의 데이터 교환을 위해 CAN 통 신 2개 port를 지원하도록 하였다. 3대의 차량 각각 에 통신 단말기를 장착하였으며 각 차량에서는 위 치, 속도, 조향각, 요레이트, 제동 여부 등의 신호를 송신하도록 하였다. 또한 레이더 장치에서 감지된 상대 거리와 상대 속도 정보도 포함하였다. 다음 Fig. 1은 시험에 적용된 차량들과 송수신 신호를 나 타낸 것이다. 3대의 시험 차량이 제작되었으며 이 중에서 2대의 차량에는 레이더를 장착하였다.
교차로 안전 시스템 개발은 교차로 신호를 수신
Fig. 1 System configuration
Manbok Park․Sanghyun Lee․Sibum Jun․Seokcheol Kee․Jungbeom Kim․Changdon Kee․Kyuwon Kim․Kyongsu Yi
Fig. 2 Traffic sign system and controller
해야하기 때문에 교차로 시스템을 Fig. 2와 같이 제 작하였으며 신호를 제어하기 위한 제어기도 설치하 였다.
차량에서와 동일한 V2X 단말기를 활용하여 현재 신호등 색깔, 다음 신호등 색깔, 현재 남은 시간 그 리고 교차로의 위치 등을 송신하게 된다. 교차로의 위치는 DGPS(Differential GPS)로 측정된 정확한 값 을 저장하고 있게 된다.
2.2 전체 알고리즘 구조
다음 Fig. 3은 교차로 안전 시스템에 대한 전체적인 알고리즘 구조를 보여준다. 전체적으로 인식, 판단, 경고 또는 제어의 구조를 가지고 있다. 인식 단계에 서는 위치 정확도 개선 및 차량 Identification을 통해 주변 지도 작성이 이루어진다. 차량 Identification
Fig. 3 Structure of control algorithm
알고리즘 개발을 위해서 V2X 정보, 차량정보 및 환 경 센서 정보를 이용한다. 판단 단계에서는 충돌 위 험 및 경고 여부가 결정된다. 경고 또는 제어 단계에 서는 위험 상황이 감지되면 경고 또는 제어를 통해 운전자에게 정보를 전달하고 또는 경우에 따라서는 자동 제어를 통해 충돌을 회피하게 된다.
3. 필수 요소 기술 개발
V2X 기반 시스템을 구성하기 위한 필요한 요소 기술들에 대해 논한다. 중요한 측위 정확도 및 차량 Identification등에 대해 논한다.
3.1 측위 정확도 개선
V2X 기반 시스템을 구성하기 위해서는 정확한 측위가 매우 중요하다. 그러나 현재 상용 가능한 저 가 GPS의 경우 정확도가 부족하기 때문에 그대로 적용하는 것에는 차선을 구분해야하는 기능 개발에 문제가 있다. 따라서 본 연구에서는 GPS 위성 정보 에 대한 보정 정보를 이용하여 GPS 자체 측위 개선 알고리즘을 개발하였다.11,12) Fig. 4는 인터넷에 접속 하여 보정정보를 통한 GPS정확도 개선을 위한 RTCM(Radio Commission For Maritime Services) 정 보를 획득하고 측위 개선을 위한 알고리즘 개발을 위한 환경을 보여준다.13,14)
FKP(Flachenkorrekturparameter)는 면 보정계수를 연산하고 GPS 모듈에 적용함으로써 전리층 및 이온 층에서 발생한 오차를 줄인다.14)
Fig. 5는 정지 상태에서의 보정 전후의 시험 결과
Fig. 4 Test environment for improvement of GPS accuracy
Development of Control Algorithm for Intersection Safety System Using the Fusion of V2X and Environmental Sensors
Fig. 5 Static test results
Table 1 Comparison of static test results
CEP Bias
보정 전 (m) 1.61 1.38
보정 후 (m) 0.76 0.07
Fig. 6 Dynamic test results
Table 2 Comparison of dynamic test results
CEP Bias
보정 전 (m) 1.05 0.84
보정 후 (m) 0.99 0.34
를 나타낸 것이다. 보정 전에 비해 상당한 개선 효과 가 있는 것을 알 수 있다. CEP 기준 약 50% 이상, bias 기준 상당한 개선 결과가 도출되었다.15)
Table 1은 보정 전후의 수치를 나타낸 것이다.
CEP와 bias로 비교 결과를 보여주고 있다.
Fig. 6은 약 40kph로 주행 중에 측정한 결과를 나 타낸 것이다.
Table 2는 보정 전후의 수치를 나타낸 것이다.
CEP 기준 개선 효과는 작지만 bias는 크게 개선됨을 알 수 있다. 이는 FKP는 공간이격오차 보상을 통해 bias 오차를 감소시키기 때문이다. 정적 상태에 비해 서는 개선율이 크지 못한 것은 차량 이동에 의한 보 정 정보의 불확실성 증가에 있다.
3.2 차량 Identification
차량 간 통신을 통한 정보와 차량 센서로 받은 데
Fig. 7 Vehicle identification
이터 간 융합을 통해 정확도 개선되고 강건성 높은 신호를 생성하기 위해서는 데이터 매칭 즉 차량 Identification 과정이 필수적이다. 차량 자체 센서 정 보 뿐만 아니라 차량 간 통신을 통해 정보 교환이 발 생하기 때문에 차량 내부에 상당한 양의 정보가 모 이게 된다. 각 정보들과 각 차량들과의 일치시켜주 는 것이 필요하다. Fig. 7은 차량 3대가 존재할 경우 로 예를 보여주고 있다.
Veh0 차량만 전방 레이더와 통신 모듈이 장착되 었고 나머지 차량들은 통신 모듈만 장착한 것으로 가정한 것이다. 각 차량의 표의 왼쪽 열은 자기 차량 센서 정보이며 오른쪽 열은 통신으로부터 받은 정 보들이다. Veh0 차량의 경우 5개의 정보를 통해서 어떤 정보가 차량 1의 정보이고 어느 것이 차량 2의 정보인지를 먼저 파악해야 정보 융합을 통해 정확 도 개선과 강건성을 확보할 수 있다.
Fig. 8과 같이 Veh0 차량의 경우, GPS 정보 3개를 이용해 상대거리 두 개, 즉 주변 상대 차량과의 거리 를 얻을 수 있으며 레이더를 통한 두 개의 상대거리 를 확보할 수 있다. 이렇게 확보된 총 4개의 정보들 중에서 어느 정보들이 Veh1 차량에 속하는지 Veh2
차량에 속하는지를 결정해야 한다. 이러한 결정을 통해 각 정보들의 할당 및 데이터 간 융합을 통한 정 확도 개선을 진행할 수 있도록 해준다.
박만복․이상현․전시범․기석철․김정범․기창돈․김규원․이경수
Fig. 8 Relative distance calculation and vehicle identification at Vehicle 0
Fig. 9 Calculation of all relative distances
Fig. 9는 각각 레이더로부터 상대거리들과 GPS를 이용한 상대거리들의 결과를 나타낸 것이다.
차량 정보 매칭 구현은 확률적인 방법을 이용하 였다. 레이더 센서의 경우 종 방향은 약 50cm 이하 그리고 횡방향의 경우 약 0.3도 정도의 오차를 가지 고 있다고 알려져 있다. 이는 GPS 오차범위보다 작 기 때문에 레이더 정보를 reference 정보로 간주할 수 있다. 이를 바탕으로 데이터 간의 매칭 확률을 확 보하기 위해 Belief 이론을 적용하였다.16) Fig. 10은 각각의 정보들 간에 매칭 확률을 나타낸 것이다.
GPS1과 레이더 정보 이용 상대거리1이 거의 전 구 간에서 90% 이상의 확률을 보이는 것을 알 수 있다.
마찬가지로 GPS2와 레이더 정보 이용 상대거리2의
Fig. 10 Probability of data matching between relative distances
경우도 90% 이상의 확률을 확보한 것을 알 수 있다.
반면 나머지 두 경우에서는 5% 미만의 확률 분포를 가지게 된다.
차량 Identification이 완료되면 kalman 필터링을 통해 정확도 개선 및 주변 차량들에 대한 트래킹을 수행하게 된다.
4. 알고리즘 개발
앞 절에서 개발된 요소 기술을 바탕으로 교차로 안전 시스템을 개발하였다. 환경 센서와 V2X를 융 합한 교차로 최적 통과 시스템 및 교차로 충돌 회피 시스템의 알고리즘을 개발하였다.
4.1 교차로 최적 통과 알고리즘 개발 다음 Fig. 11은 교차로 최적 통과 시스템에 대한 개념을 소개한다. 초록 신호등 상태에서는 신호등 이 빨간색으로 변하는 시간보다 교차로 도달 시간 이 작은 경우 가속을 통해 교차로에 정차 없이 통과 할 수 있다. 또한 빨간색 신호등인 경우에는 감속을 통해 교차로에서 불필요한 정차없이 통과 가능하게 할 수 있다. 요구 감속도가 운전 편의성을 고려하여 3m/s2 이상인 경우는 정차한다.
교차로로부터 V2I 단말기를 통해 정확한 교차로 위도, 경도 값을 얻게 되며 자기 차량 GPS 정보와 결
V2X 및 환경 센서 융합 기반 교차로 안전 시스템 알고리즘 개발
Fig. 11 Concept of intersection optimal pass
합하여 교차로까지의 거리를 연산한다. 이를 차량 속도로 나눈 것이 아래 식 (1)과 같이 교차로까지의 남은 시간(TTI: Time -to-Intersection)을 구한다. 이것 들을 이용하여 알고리즘 구성에 필요한 변수들을 구한다.
(1) 여기서 S는 교차로까지 남은 거리, V는 현재 차량 속도, a는 차량 가속도를 나타낸다.
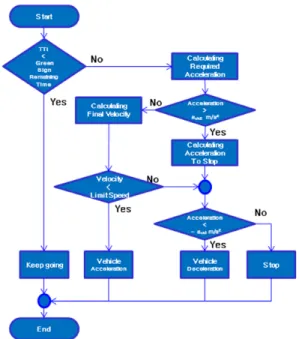
Fig. 12는 전방 차량이 없는 경우 초록색 신호등 에서의 최적 통과 알고리즘의 순서도를 나타낸 것
Fig. 12 Control flow chart for green light without front vehicle
Fig. 13 Control flow chart for green light with front vehicle
이다. TTI 값과 남은 시간을 비교하여 작으면 그대 로 속도를 유지하게 한다. 반면에 TTI 값이 크다면 가속하여 통과하여야 하기 때문에 요구되는 가속도 를 연산한다. 요구 가속도가 안락하게 운전 할 수 있 는 물리적 한계 내이고 최종 속도가 제한 속도 등에 위배되지 않으면 가속하여 통과한다. 만약 물리적 한계 즉 1m/s2를 넘어선다면 정차하도록 제어를 수 행한다.
Fig. 13은 전방 차량이 있는 경우 초록색 신호등 에서의 최적 통과 알고리즘의 순서도를 나타낸 것 이다. 전방 차량이 존재하기 때문에 전방 차량과 자 기 차량 사이의 충돌 가능성인 TTC(Tme-to-colli- sion)과 TTI를 비교하는 과정이 필수적으로 존재하 게 된다. TTC가 TTI보다 크게 되면 감속을 수행하 여 선행 차량과의 충돌의 방지하게 제어한다.
4.2 교차로 충돌 회피 알고리즘 개발 최적 통과 알고리즘 개발 검증된 상황 하에서 교 차로 신호등 위반 차량들과의 충돌 발생을 방지하 기 위한 교차로 충돌 회피 시스템이 개발되었다.
Manbok Park․Sanghyun Lee․Sibum Jun․Seokcheol Kee․Jungbeom Kim․Changdon Kee․Kyuwon Kim․Kyongsu Yi
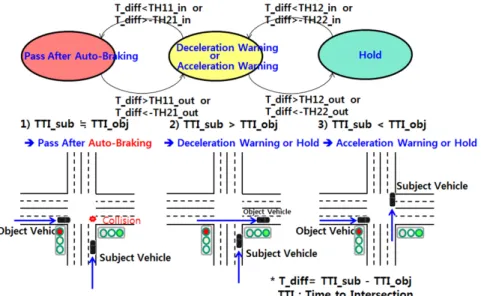
Fig. 14 State diagram for intersection collision avoidance algorithm
Fig. 14와 같이 자기 차량과 신호 위반 차량의 TTI 차 이를 비교함으로써 3개의 상태 즉 유지, 감속 경고 또는 가속 경고, 자동 제동 후 통과 상태 중 1개의 상 태를 선택하여 운전자에게 전달한다. 만약 감속 경 고 후에도 운전자가 제동을 수행하지 않고 충돌이 예측되면 자동 제동 후 교차로를 통과시킴으로써 충돌을 회피하게 한다.
각각의 상태는 자기 차량과 상대 차량의 TTI 값의 비교를 통해 이루어진다. 제동 후 통과 상태에서는 목표 가속도를 연산하고 이 목표 가속도가 발생할 수 있도록 제동 장치를 제어한다. 목표 가속도를 연 산하기 위해서 아래 식 (2)와 같이 자기 차량의 목표 TTI를 먼저 연산한다.
(2)
여기서 TH12out은 Threshold Value를 나타낸다.
목표 가속도는 아래 식 (3)과 같이 연산되며 차량 가속도 제어기를 통해 제동 장치의 휠 실린더 압력 을 제어함으로써 차량의 감속도를 발생시키게 된다.
(3)
여기서 S는 교차로까지 남은 거리, V는 현재 차량 속도를 나타낸다.
5. 실차 검증
개발된 알고리즘 검증을 위해 시험 차량 3대를 구 성하였다. 또한 신호등 시스템 및 신호등 제어기도 구성하였다.
5.1 교차로 최적 통과 로직 검증
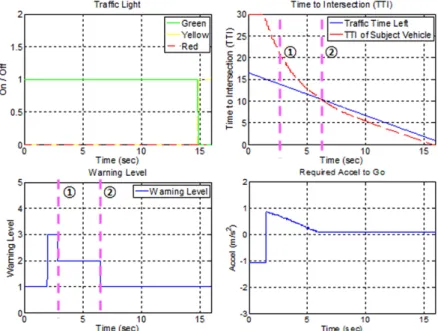
Fig. 15는 초록 신호등이고 선행 차량이 없을 때 의 실험 결과를 나타낸 것이다. 좌측 위쪽 그림은 신 호등 색깔을 나타내고 있다. 값이 1인 겨우 각각 초 록색은 초록색 신호등을, 노란색은 노란색 신호등 을 빨간색은 빨간색 신호등이 켜짐을 나타낸 것이 다. 우측 위쪽 그림은 신호등 남은 시간과 교차로까 지 도달하는 시간인 Time to Intersection(TTI)을 나타 낸다. 좌측 아래쪽 그림에는 이를 바탕으로 연산된 경고 신호를 나타낸 것이다. 3은 감속을, 2는 가속을 1은 현 상태 유지를 나타낸다. 오른쪽 아래쪽 그림 은 권고하는 가속도를 나타낸 것이다. 그림의 ➀ 지 점에서 TTI가 초록 신호등 남은 시간보다 작아 가속 경고 발생하였으며 그림의 ➁ 지점에서는 초록 신 호등 남은 시간보다 커지게 되어 유지 신호가 발생 하였다.
Fig. 16은 초록 신호등이고 선행 차량이 있을 때 의 실험 결과를 나타낸 것이다. 좌측 위쪽그림과 우 측 위쪽 그림은 Fig. 15와 동일하다. 좌측 아래쪽 그
Development of Control Algorithm for Intersection Safety System Using the Fusion of V2X and Environmental Sensors
Fig. 15 Test results for intersection optimal pass in case of green light without preceeding vehicle
Fig. 16 Test results for intersection optimal pass in case of green light with preceeding vehicle
림에는 그림의 ➀ 지점에서 TTI를 바탕으로 가속 요 구 사항이 발생하였으나 오른쪽 아래 그림의 ➁ 지 점에서 상대 차량과의 TTC가 자기 차량의 TTI보다 작아지는 관계로 감속 요구 사항이 최종적으로 결 정되는 실험 결과가 발생하였다.
5.2 교차로 충돌 회피 로직 검증
교차로 충돌 회피 알고리즘을 개발하고 가속 경 고, 감속 경고 및 자동 제동 후 통과 상태에 대해 실 차 시험을 통해 검증하였다. 이것 중에서 Fig. 17은 신호등 위반 차량이 있을 때 충돌 회피 알고리즘 실
박만복․이상현․전시범․기석철․김정범․기창돈․김규원․이경수
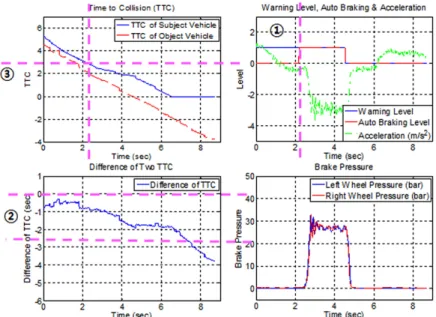
Fig. 17 Test results for intersection collision avoidance
험 결과를 나타낸 것이다. 왼쪽 위쪽 그림에는 자기 차량과 신호 위반 상대 차량의 TTI 정보를 나타내며 오른쪽 위쪽 그림에는 경고, 자동 제동 여부 및 차량 가속도 값을 나타내었다. 왼쪽 아래쪽 그림에는 TTI 차이값을 나타내었으며 오른쪽 아래쪽 그림에는 자 동 제동을 수행하기 위한 휠 압력을 나타낸 것이다.
그림 ➀ 지점 이전까지는 감속 경고를 발생시켜 충 돌을 회피하고자 하였으나 운전자가 제동을 수행하 지 않은 상태이다. ➀ 지점에 도달하여서는 TTI 차이 가 0초에서 -2.5초 사이에 존재하게 되고 자기 차량 TTI가 3초 이하이기 때문에 충돌이 예측되어 자동 제동을 수행하여 충돌을 회피한 상황을 보여주고 있다.
6. 결 론
V2X 통신 기술과 환경 센서 기반 운전자 지원 시 스템이 통합된 새로운 안전 시스템의 알고리즘이 안전 기능의 향상과 운전의 안락함을 증대시키기 위해 설계되었다. 현재 운전자 편의 시스템들의 단 점인 사각지대나 감지 거리 문제는 V2X의 도입을 통해 상당부분 해결될 수 있다.
V2X와 운전자 편의 시스템의 통합을 위해서는 먼저 선행되어야할 요소 기술이 개발되어야한다.
본 연구에서는 GPS 측위 정확도 개선을 수행하여 차선 기반 기능 개발의 가능성을 확보하였다. GPS 정확도는 RTCM 위성 정보를 통해 개선을 수행하였 다. 또한 여러 경로로부터 입수되는 정보들을 각 차 량과 연계시키기 위한 차량 Identification 기술이 개 발 되었다.
이러한 필수 요소 기술들을 바탕으로 교차로 안 전 시스템이 개발되었다. 첫 번째로는 교차로를 정 차없이 통과할 수 있게 해주는 교차로 최적 통과 알 고리즘이다. 신호등 색깔 유지 시간, 다음 신호등 색 깔 등 및 자기 차량과 교차로까지의 GPS정보를 이 용하여 교차로까지의 남은 시간을 바탕으로 운전자 에게 교차로 최적 통과 속도를 제시한다. 위의 기능 에서는 선행 차량의 존재 여부를 고려하여 알고리 즘이 구성되었다. 둘째로는 신호등 위반 차량이 존 재할 경우 충돌 회피를 위한 기능을 개발하였다. 자 기 차량과 상대 차량의 TTI 차이를 바탕으로 상태를 결정하고 경고를 수행한다. 감속 경고에도 운전자 가 제동을 수행하지 않는 경우 자동 제동을 통해 충 돌 회피를 지원하게 된다.
향후 계획으로는 다양한 시험 환경을 구성하고 더 많은 다수의 차량을 동원하여 알고리즘의 효용 성과 강건성을 검증할 예정이다.
V2X 및 환경 센서 융합 기반 교차로 안전 시스템 알고리즘 개발
후 기
본 연구는 산업통상자원부 및 한국산업기술평가관 리원의 산업융합원천기술개발사업(IT융합) [10041686, 자율안전주행을 위한 협력제어통신/보안 기술 및 핵심 코어 칩 개발]과 서울대학교 정밀기계연구소, BK 21 PLUS, 2013년도 정부(미래창조과학부)의 재 원으로 한국연구재단의 지원을 받아 수행된 기초연 구사업의 일환으로 수행하였음.
References
1) 도로교통공단, 교통사고 통계분석, 2008.
2) S. Easa, “Reliability-based Design of Inter- green Interval at Traffic Signals,” J. Transpor- tation Engineering in ASCE 119, pp.255-271, 1993.
3) Y. Moon, J. Lee and Y. Park, “System Integ- ration and Field Tests for Developing In- vehicle Dilemma Zone Warning System,”
Transportation Research Record 1826, Trans- portation Research Board (TRB), pp.53-59, 2003.
4) M. Park, H. Lee, S. Lee, Y. Kim, M. Kim, D.
Kim, S. Yoo, S. Seo and K. Yi, “Development of Communication Based Collision Warning Systems,” Int. Symposium on Advanced Vehicle Control, 2012.
5) M. Park, S. Lee, Y. Kim, M. Kim, W. Ko, J.
Kim and K. Yi, “Development of Communi- cation Based Intersection Safety Support Sys- tem,” ITS World Congress, 2013.
6) Y. Park, Y. Moon, Y. Cho and K. Kum, “Field Test for Evaluating Cooperative Intersection
Signal Violation Warning System (CISVWS),”
Int. J. Automotive Technology, Vol.14, No.2, pp.275-281, 2013.
7) BMW, BMW Shows Intersection Anti-crash System, http://canadamotoguide.com/2011/05/
18/bmw-shows-off-anti-crash-system-for-inters ections, 2011.
8) Volvo, Intersection Support, http://www.volvocars.
com/kr/top/about/news-events/pages/default.aspx?i temid=185, 2012.
9) RITA, Cooperative Intersection Collision Avoid- ance System Limited to Stop Sign and Traffic Signal Violations (CICAS-V) Task 10 Final Report, 2008.
10) RITA, CICAS (Cooperative Intersection Collision Avoidance Systems), http://www.its.dot.gov/cicas/
#sthash.Fo3RUPp7.dpuf, 2014.
11) J. Kim, J. Song, H. No, C. Kee, M. Yang and M. Park, Improvement of DGPS Position Accu- racy Using FKP Correction Information, The Korean GNSS Society(KGS), 2013.
12) J. Kim, J. Song, H. No, C. Kee, M. Yang, M.
Park and S. Lee, Improvement of DGPS Posi- tioning Accuracy for Low Cost Receiver Using FKP Correction Message, International Tech- nical Meeting(ITM), pp.292-296, 2014.
13) Radio Technical Commission for Maritime Ser- vices, RTCM 10402.3 Recommended Stan- dards for Differential GNSS Service, 2001.
14) Radio Technical Commission for Maritime Ser- vices, RTCM Standard 10403.1, 2011.
15) Wikipedia, http://ko.wikipedia.org/wiki, 2014.
16) S. Thrun, Probabilistic Robotics, The MIT Press, Massachusetts, 2005.