학 술 논 문
153
손 동작 스캔을 이용한 잔뇨량 측정용 초음파 방광 스캐너
이정환 · 배정호 · 이수열 · 조민형
경희대학교 생체의공학과
A New Ultrasound Bladder Scanner to Estimate Urine Volume Using Hand-Motion Scan
Jung Hwan Lee, Jung Ho Bae, Soo Yeol Lee and Min Hyoung Cho
Department of Biomedical Engineering, Kyung Hee University, Youngin, Korea (Manuscript received 1 May 2018 ; revised 13 July 2018 ; accepted 19 July 2018)
Abstract: 3D ultrasound bladder scanners are getting popular in hospitals for the patients with bladder dysfunction.
A current bladder scanner adopts a mechanical scan to acquire 3D images and requires two motors and complicated mechanical devices. In this paper, we propose a new ultrasound bladder scanner using hand-motion scan. Instead of two motors and mechanical devices, it has a motion sensor to record transducer positions during hand-motion scan.
The experiments with a bladder phantom and volunteers showed similar measurement accuracy to a conventional 3D ultrasound bladder scanner. We expect that the proposed method will reduce the cost and size of the bladder scanner.
Key Words: urine volume, ultrasound bladder scanner, bladder wall detection, volume estimation, hand- motion
I. 서 론
방광 질환을 가진 환자들을 관리하기 위하여 방광 내 잔 뇨량을 측정하는 것은 방광 내 소변량을 파악하여 방광의 파열이나 기능 부전 심화를 사전에 예방 할 수 있기 때문에 매우 중요하다[1]. 공간해상도가 매우 높은 비침습적 의료 영상 촬영 장비인 MRI, CT등을 이용하여 3차원 영상을 얻 고, 이로부터 방광 내 잔뇨량을 비교적 정확하게 추정 할 수 있지만[2,3], 이와 같은 장비들은 부피가 크고, 수시로 잔뇨 량을 측정하기에는 비용과 시간이 너무 많이 들며, 더욱이 CT 의 경우에는 환자를 불필요한 방사능에 자주 노출시키는 문제가 있다. 따라서 방광 내 잔뇨량을 측정하기 위해서는
위와 같은 문제점이 없는 초음파 장비를 이용하는 것이 가 장 적합하다. 하지만 잔뇨량을 측정하기 위해 방광의 부피 를 추정하려면 3차원 영상이 필요한데 일반적인 초음파 영 상 진단기로는 용이하지 않으며 2차원 배열형 트랜스듀서를 장착한 고급형 3차원 초음파 영상 진단기는 가격적인 문제 가 다시 발생한다. 과거에는 2~3장의 2차원 초음파 영상으 로 방광의 부피를 추정하는 방법도 있었으나 정확도가 낮고, 측정치가 일관적이지 못한 문제가 있었다[4-7].
최근에는 방광 부피 측정만을 목적으로 하여 소형의 3차 원 초음파 방광 스캐너가 개발되어 잔뇨량 측정을 위해 널 리 쓰이기 시작했다. 이 초음파 방광 스캐너는 일반적인 초 음파 영상 진단기와 달리 단 한 개의 트랜스듀서를 2개의 모터로 움직여서 2차원 스캔을 함으로써 3차원 영상을 얻 는다. 일반적인 초음파 영상 진단기에 비하여 해상도는 많 이 떨어지고 화질도 나쁘지만 소형으로 제작이 가능하고 무 엇보다 저가격으로 3차원 영상을 얻을 수 있어서 효율적으 로 방광의 부피를 비교적 정확히 추정하는 진단기이다. 이 방광스캐너는 3차원 초음파 영상 제공이 목적이 아니고, 내 장된 방광 추출 알고리즘을 통하여 방광의 부피, 즉 잔뇨량 Corresponding Author : Min Hyoung Cho
Department of Biomedical Engineering, Kyung Hee University 1732, Deogyeong-daero, Giheung-gu, Yongin-si, Gyeonggi-do, Korea
TEL: +82-31-201-2170 E-mail: mhcho@khu.ac.kr
이 연구는 2017년도 산업통상자원부 및 산업기술평가관리원
(KEIT) 연구비 지원에 의한 연구임(과제 번호 10062799).
154
정보만 제공하는 진단기라고 할 수 있다[8].
전술한 바와 같이 방광 스캐너는 한 개의 트랜스듀서만을 사용하면서 2개의 모터로 2차원 스캔을 하는 방법을 쓰기 때문에 이 부분의 기구물이 복잡하고 부피를 차지하며 또한 낙하와 같은 충격에 매우 취약한 문제점을 가지고 있어서 추가적인 소형화 작업을 어렵게 하면서 제조 비용에도 부담 을 주고 있다. 따라서 기계적인 스캔을 하지 않고 3차원 공 간 데이터를 얻을 수 있는 방법이 개발된다면 잔뇨량 측정 을 위한 방광 스캐너는 더 작은 크기로 인해 휴대성이 높아 지고 가격도 더욱 떨어져서 활용도가 제고될 것이다.
본 논문에서는 모터를 이용한 기계적인 스캔 대신에 사람 의 손을 움직여서 스캔하는 방법을 제안하고 이를 구현하여 방광의 잔뇨량 측정이 가능함을 실험으로 보인다. 3차원 공 간 샘플링을 위하여 사람이 고정 트랜스듀서를 손에 쥐고 임의의 방향으로 움직이면서 초음파 데이터를 얻음과 동시 에 그때그때의 트랜스듀서의 위치 벡터를 측정, 저장하는 방 법이다. 최근에 널리 활용되고 있는 가속도 센서나 자이로 센서 등 모션 센서는 가격도 매우 저렴하지만 사람의 손 동 작을 빠르고 정확하게 측정할 수 있다. 기계적 스캔을 위한 모든 기구물과 부품이 없어지게 되므로 트랜스듀서와 신호 수집부, 제어부로만 구현이 가능하여 매우 간단하며 부피도 작아진다.
트랜스듀서가 임의의 방향으로 무작위 하게 움직이지만 공간 샘플링이 충분하다면 내부 방광의 부피를 계산하는 것 이 가능하다. 본 논문에서는 이 모션 센서와 고정 트랜스듀 서를 이용한 새로운 방광 스캐너와 손 동작에 따른 방광 부 피 측정 방법을 제안한다.
II. 손 동작에 의한 초음파 스캔 방법
1. 손 동작 측정
최근에 스마트폰이나 게임기에 장착되어 인체 또는 물체 의 움직임을 감지하는 모션 센서는 부피가 작고 가격이 저렴 하면서도 비교적 정밀하고 빠르게 움직임을 측정할 수 있다.
본 논문에서는 모터를 사용하지 않고 손의 움직임으로 초음 파 스캔을 하려고 하므로 초음파 신호를 받는 순간의 트랜 스듀서의 위치를 측정하는 방법을 시도하기 위하여 일반적 으로 널리 쓰이는 상업용 MEMS 모션 센서 중 한가지인 미 국 InvenSense사의 MPU-9250을 채택하였다. MPU- 9250 은 9축 모션 센서로서 가속도, 자이로, 그리고 지자계 센서, 세가지가 함께 내장되어 각각 3축의 모션을 측정한다.
가속도 센서는 동작의 순간 가속도를 측정하는데 중력 가속 도를 기준으로 하여 물체의 기울기 각도를 측정할 수 있으 며 자이로 센서는 물체의 회전 각속도를 측정할 수 있는 센 서이므로 각속도를 적분하는 방법을 이용하여 물체의 기울
기를 측정할 수 있다. 지자계 센서는 지구 자기를 기준으로 하여 움직인 각도를 측정하지만 전기적 신호에 의해 생기는 미 약한 자기 잡음을 우려하여 본 논문에서는 사용하지 않았다.
가속도 센서의 기울기 측정과 자이로 센서의 기울기 측정은 상호 보완의 성질을 가지고 있는데 가속도 센서의 신호는 고주파 잡음에 취약하며 자이로 센서의 신호는 드리프트와 같은 저주파 잡음에 취약하므로 이 신호를 같이 사용하면 잡음에 강하고 신뢰성 높은 기울기 각도를 측정할 수 있다.
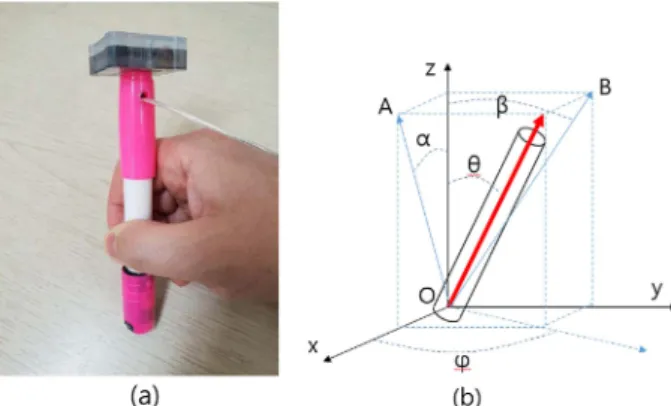
이를 위하여 상보 필터나 칼만 필터와 같은 신호처리 방법 이 널리 알려져서 활용되고 있다[9]. 이런 센서에 마이크로 콘트롤러를 부착하여 필터링 처리까지 한 측정치를 제공하 는 IMU(Inertial Measurement Unit; 관성측정장치) 모 듈이 흔히 활용되고 있어서 본 논문에서도 IMU를 트랜스 듀서에 부착하여 사용하였다. 사용된 모션 센서는 초당 1000 개의 기울기 각도를 측정할 수 있기 때문에 10~25 Hz 라고 알려진 사람의 손 동작을 추적하기에는 충분한 속도이 다[10]. 그림 1(a)는 실험실에서 제작한 초음파 트랜스듀서 케이스의 상단에 IMU를 부착한 실제 사진인데 IMU의 성 능 테스트를 위한 예비 실험 결과, IMU를 트랜스듀서 케 이스의 상단에 붙이는 경우나 하단에 붙이는 경우에 위치 측정의 오차는 차이를 보이지 않았다. 센서 자체의 위치와 상관없이 센서 자체의 기울기만을 이용하기 때문이다. 그림 1(b)는 손으로 트랜스듀서를 기울였을 때 모션 센서에서 측 정된 기울기 각도를 표시한 그림으로서 z축을 기준으로 하 여 α는 x-z평면상에서 기울어진 각도이고 β는 y-z 평면상에 서 기울어진 각도이다. 하단에 장착된 초음파 트랜스듀서를 환자의 복부에 고정시키고 임의의 방향으로 기울이는 움직 임을 자유롭게 한다면 다양한 각도에서 초음파 신호를 받을
그림 1. 모션 센서를 장착한 초음파 트랜스듀서와 측정 각도. (a) 상 부에 모션 센서를 장착한 초음파 트랜스듀서, (b) 트랜스듀서를 손으 로 기울였을 때의 기울어진 각도, α와 β.
Fig. 1. An ultrasound transducer with a motion sensor for hand-motion scan. (a) A lab-built transducer equipped with a motion sensor. (b) Tilting angles α and β measured by a motion sensor.
155 수 있게 되며 그 초음파 신호가 어느 각도에서 받은 것인지
를 저장해 둘 수 있다.
2. 초음파 신호 수집
초음파 신호 수집을 위하여 그림 1과 같이 트랜스듀서를 장착하고 별도의 신호 처리부를 유선으로 연결하였다. 초음 파 트랜스듀서는 1.6 MHz의 대역폭 (1.8 MHz~3.4 MHz) 을 가지며, 중심 주파수는 2.6 MHz이고, 반경 6 mm의 원 형이다. 신호 처리부에서는 2.6 MHz의 초음파 펄스를 발생 시켜 트랜스듀서를 통하여 방출하고 다시 반사된 초음파 신 호를 받아 수집한 후 메모리에 저장한다. 수집된 초음파 신 호는 RF 성분을 제거한 후 1.3 μsec의 주기로 샘플링 하였 고 초음파 펄스 이후 총 300 μsec 동안 데이터를 수집하였 으며 이를 20 msec마다 연속적으로 반복하였다. 초음파 펄 스를 방출할 때마다 그때의 모션 센서의 측정 각도 α와 β 를 초음파 반사 신호와 함께 저장함으로써 수집된 초음파 반 사 신호가 어느 방향으로의 데이터인지를 알 수 있도록 하였 다. 20 msec마다 반복하여 초음파 신호를 수집함으로써 공 간의 샘플링 주파수는 50 Hz가 된다. 모션 센서는 1 msec 가 샘플링 간격이므로 충분히 빨라서 초음파 신호의 각도 측정 오차는 무시될 수 있다. 이 트랜스듀서를 손에 쥐고 좌 우, 상하로 기울이면서 일정 시간 동안 데이터를 수집, 저장 한다. 다만, 실험자는 α와 β, 두 각도의 충분한 범위가 가급 적 골고루 샘플링되도록 주의하면서 움직인다. 사람의 손 동 작에 따라 공간 샘플링 하기 때문에 공간이 일정 간격으로 샘플링 될 수는 없으나 충분한 샘플링만 이루어진다면 다음 에 설명할 처리 방법으로 방광의 부피를 추정할 수 있다.
III. 방광 추출 알고리즘
본 연구팀은 2개의 모터를 이용하여 2차원 기계식 스캔
을 함으로써 얻어진 3차원 초음파 영상으로부터 방광을 추 출하고 부피를 계산하는 방법을 기존에 발표한 바 있다[11].
본 논문에서는 손 동작으로 얻어진 초음파 데이터에 이 기 존 방법과 유사한 알고리즘을 적용하여 부피를 추정하고자 한다. 기존 기계식 스캔 방법에서는 그림 2와 같이 섹터 스 캔을 통하여 65개의 스캔라인으로 이루어진 2차원 초음파 영상을 얻은 후, 다시 기구부를 일정 각도 15도만큼 모터로 회전시켜 같은 방법으로 추가로 2차원 영상을 얻는다. 180 도를 15도 간격으로 나누어 총 12장의 초음파 영상을 얻어 서 3차원 초음파 영상을 이루게 되며 각각의 2차원 영상에 서 방광을 추출한 후에 부피를 계산한다. 한 장의 2차원 초음 파 영상에서 스캔 라인은 1.875도의 샘플링 간격을 갖는다.
얻어진 3차원 초음파 영상은 극좌표 상에서 등간격으로 샘 플링 된 결과로 볼 수 있는데 섹터 스캔 방향을 θ라 하고, 2 차원 영상을 여러 장 얻기 위해 회전하는 방향을 φ라고 한 다면 모터로 행해진 2차원 스캔은 θ와 φ의 극좌표 공간에 서 이루어진 것으로서 θ와 φ를 등 간격으로 샘플링 한 것 이 된다.
손 동작을 통하여 무작위로 얻어진 데이터로부터 방광 부 피를 추정하기 위하여 기존 방법과 유사한 알고리즘을 적용 하려면 먼저 2차원 영상을 구성한 후에 동일한 방광 추출 알고리즘을 적용하여야 한다. 얻어진 데이터는 공간을 무작 위로 샘플링 한 결과이므로 이 샘플링을 정렬하여 기존 기 계식 스캔과 비슷한 2차원 영상을 합성한다면 기존의 방광 추출 알고리즘을 적용할 수 있다. 이 정렬을 위하여 우선 좌 표 변환을 해야한다. 기존 기계식 스캔 방식의 샘플링은 극 좌표의 θ와 φ 공간에서 행해지며 손 동작 스캔은 모션 센 서의 α와 β 공간에서 행해지기 때문이다. 간단한 기하학적 변환을 통하여 두 좌표의 상관 관계를 구할 수 있는데 그림 1(b) 와 같이 α와 β는 각각 기울어진 물체의 x-z평면에 대한 사영(projection)과 y-z평면에 대한 사영에서 기울어진 각도
그림 2. 기존 방광 스캐너의 3차원 영상 수집 방법. (a) 모터를 이용한 섹터 스캔으로 2차원 영상을 얻은 후 회전하여 반복 샘플링 (b) (a)와 같은 샘플링을 극좌표 공간에서 표시.
Fig. 2. The acquisition of a 3D ultrasound image by a conventional bladder scanner. (a) Sector scan for 2D image acquisition and multiple acquisition of a 2D image. (b) Periodic sampling in polar coordinate done by mechanical scan.
156
이다. x-z평면에 사영된 끝점 A와 y-z평면에 사영된 끝점B 를 이용하여 실제 물체가 기울어져 위치하는 좌표를 구할 수 있다. 기울어진 물체는 직선 OA와 y축을 포함하는 평면 과 직선OB와 x축을 포함하는 평면의 교선이다. 따라서 두 평면의 벡터의 외적에 의해 기울어진 물체의 벡터를 구할 수 있으므로 손 동작에 의해 기울어진 물체의 극좌표 위치 정보 θ와 φ를 다음의 식(1)로 구할 수 있다.
식 (1)
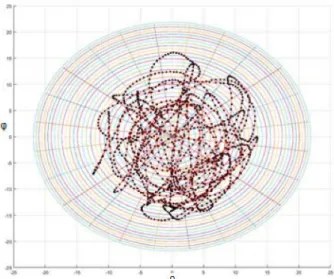
이렇게 좌표 변환을 하면 그림 2(b)와 같은 θ와 φ의 공 간에 샘플링 된 위치를 표시할 수 있게 된다. 그림 3이 실 제로 얻어진 예이다. 그림 3에서 보듯이 손 동작 스캔 방법 은 무작위 한 공간 스캔의 결과를 보여준다. 연속된 손 동 작에 따라 점들이 이어지지만 규칙성 없이 무작위 하게 스 캔 되어 있다. 이들 무작위 샘플링 데이터를 기존의 기계적 인 스캔에 의해 얻어진 규칙적인 샘플링과 같도록 재정렬하 여 2차원 초음파 영상을 합성할 수 있다. 그림 2(b)와 같이 기존 방광 스캐너의 규칙적인 샘플링 좌표 값이 그림 3의 무작위 샘플링 데이터에서는 정확히 맞지 않을 것이므로 가 까운 점들을 이용한 보간법(interpolation)을 이용한다. 즉 기존 기계식 스캔의 방광 스캐너와 같이 θ는 1.875도 간격, φ 는 15도 간격으로 규칙적인 샘플링이 되도록 보간하여 추 정한다. 보간법을 쓸 때는 주어진 점에서 어떤 기준치보다 근접한 샘플링 점들의 데이터들을 추려낸 후 거리에 반비례 한 가중치를 주어 해당 값을 추정하는 방법을 사용한다. 만 약 기준치보다 근접한 데이터가 없을 경우에는 가장 근접한
점으로 대체한다. 이렇게 하여 기존 기계식 스캔과 동일한 샘플링의 2차원 초음파 영상들을 여러 장 합성하여 최종적 으로 3차원 영상을 만든다. 이렇게 만들어진 3차원 초음파 영상을 마치 기존 기계식 스캔의 방광 스캐너로 얻은 데이 터로 간주하고 본 연구팀이 이미 발표한 참고 문헌 [11]과 동일한 알고리즘을 적용하여 방광을 추출하고 부피를 추정 한다.
IV. 실험 결과
제안한 손 동작 스캔 방식의 방광 부피 추정 방법을 검증 하기 위하여 방광 모사 팬텀과 인체에 대하여 실험을 진행 하였다. 부피 추정 성능을 비교하기 위하여 이미 병원에서 사용되고 있는 상용 잔뇨 측정용 초음파 방광 스캐너 (BioCon-900, Mcube Technology Co., Korea) 의 측정치 와 본 연구에서 제안한 손 동작 스캔 방법으로 측정된 결과 와 비교하였다. 손 동작 스캔을 할 때는 트랜스듀서가 표면 θ tan =
–1tan
2( ) tan α +
2( ) β ϕ tan
–1tan α
β --- tan
=
그림 3. 손 동작에 의한 스캔 위치 좌표들을 극좌표 공간 (θ, φ)에 표 시한 실제 예.
Fig. 3. Random sampling in polar coordinate done by hand- motion scan.
그림 4. (a) 트랜스듀서가 미끄러지지 않도록 제작된 고정대. (b) 트 랜스듀서를 장착하여 조립된 모습.
Fig. 4. (a) The fixing devices to avoid slipping. (b) A transducer equipped with the fixing devices (a).
그림 5. 구형 방광 모사 팬텀.
Fig. 5. A spherical bladder-mimicking phantom.
157 에서 옆으로 미끄러지지 않고 단지 기울기만 변하도록 그림
4 와 같은 미끄럼 방지용 고정대를 만들어 이용하였다. 이 미 끄럼 방지용 고정대는 팬텀이나 인체 피부와 같이 미끄러운 표면에서 트랜스듀서가 옆으로 미끄러지지 않고 고정된 위 치에서 임의로 기울어지는 동작만 가능하게 하였다.
방광 모사 팬텀으로는 그림 5에 나와 있는 구형 방광 초음
파 팬텀(모델명 MDSBSPHANTOM, Mcube Technology Co., Korea) 을 사용하였으며 이 팬텀은 인체 조직과 유사한 물질 속에 66 ml의 구형 공간이 있고 이 안에 액체가 채워 져 있다. 이 팬텀에 대해 그림 1(a)의 트랜스듀서를 그림 3 과 같이 무작위로 30초 동안 손으로 움직여 스캔하였다. 그 림 6은 실제로 손 동작 스캔하며 데이터를 수집하는 모습니 다. 그렇게 수집된 데이터를 전술한 방법과 같이 재배열하여 2 차원 초음파 영상으로 합성한 결과가 그림 7(a)와 같다. 그 림 7(b)는 동일한 팬텀에 대해 상용 방광 스캐너로 기계식 스캔을 하여 얻은 초음파 영상이다. 그림 7의(a)와 (b)를 비 교해 보면 매우 유사하게 구형 방광 팬텀이 나타나 있다. 다 만, 손으로 스캔한 (a)에서는 양쪽 바깥 쪽에 보간한 흔적 이 크게 보이는데 손으로 스캔할 때 그림 3에서 보이듯이 중심부는 충분히 촘촘한 샘플링이 이루어지지만 바깥쪽은
그림 6. 손 동작 스캔하여 데이터를 수집하는 모습.
Fig. 6. Data acquisition by hand-motion scan.
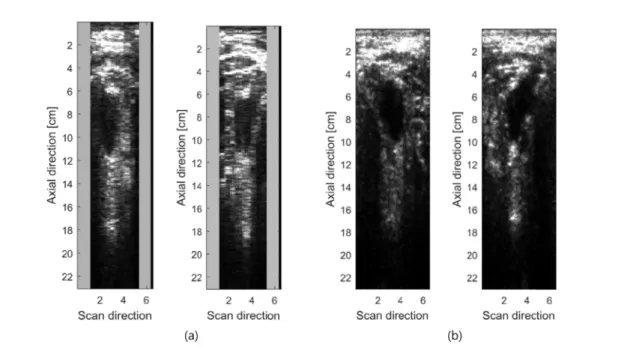
그림 7. 방광 모사 팬텀의 초음파 영상 (a) 손 동작 스캔으로 얻어진 초음파 데이터를 재배열하여 합성한 초음파 영상. (b) 상용 방광 스캐너 로 촬영한 초음파 영상.
Fig. 7. Ultrasound images of a bladder-mimicking phantom. (a) Two images acquired by hand-motion scan. (b) Two images acquired by a conventional bladder scanner.
표 1. 구형 방광 모사 팬텀에 대한 실험 결과
Table 1. Results of the proposed method and the conventional scanner for the bladder-mimicking phantom
bladder-mimicking phanto (66 ml)
Hand-Motion Scanner
Conventional Bladder Scanner
Average volume (ml) 64 65.8
Standard deviation (ml) 0.9 1.1
Error (%) 1.4 1.7
158
샘플링 간격이 넓어지기 때문이다. 하지만 방광의 외곽선을 검출하여 부피를 추정하기에는 화질이 충분하였다.
이렇게 합성하여 만들어진 12장의 2차원 초음파 영상에 참고 문헌 [11]의 방광 추출 알고리즘으로 추출한 3차원 방 광의 모습은 그림 10(a)에 나타나 있으며 부피 추정 알고리 즘을 적용하여 추정한 부피는 표 1과 같다. 동일 팬텀에 대 하여 5회 반복 측정되었고, 5회 측정값의 평균과 표준편차,
그리고 평균치에 대한 표준편차의 비율인 오차율을 나타내 었다. 표 1에서 보듯이 66 ml의 방광 팬텀에 대하여 상용 스캐너를 이용해 구한 부피의 평균치는 65.8 ml이고 표준 편차는 1.1 ml이다. 손 동작 스캔을 이용해 구한 부피의 평 균치는 64 ml 이고, 표준편차는 0.9 ml이다. 본 논문이 제 안한 손 동작 스캔 방법이 상용 스캐너와 큰 차이가 없으며, 참값인 66 ml에 대해3%의 오차로 비교적 정확한 값을 보
그림 8. 인체 방광의 초음파 영상 (a) 손 동작 스캔으로 얻어진 초음파 데이터를 재배열하여 합성한 초음파 방광 영상. (b) 상용 방광 스캐너 로 촬영한 초음파 방광 영상.Fig. 8. Ultrasound images of a human bladder. (a) Two images acquired by hand-motion scan. (b) Two images acquired by a conventional bladder scanner.
그림 9. 그림 8의 인체 방광 초음파 영상으로부터 추출한 방광의 윗벽과 아랫벽. (a) 손 동작 스캔의 결과. (b) 상용 방광 스캐너의 결과.
Fig. 9. The segmentation results of upper and lower bladder walls. (a) The results of segmentation done in Fig. 8 (a). (b) The results of segmentation done in Fig. 8(b).
159
여 주고 있다. 또한 5회 실험의 오차율이 상용 스캐너와 비 슷한 정도로 적게 나타났다는 것은 측정의 재현성도 높음을 말해주는 것이다.
본 논문이 제안한 방법을 실제 사람에 대해서도 적용하 였다. 자발적으로 인체 실험에 참여한 건강한 20대 성인 남 성 5인을 대상으로 하여 동일인에 대해 시간 간격을 두고 2 회의 실험을 진행하여 총 10회가 수행되었다. 1회 실험당 10 번의 측정을 하였고, 10번의 측정은 최대한 짧은 시간 동 안 수행되어 방광 내부의 부피가 변하지 않을 것이라는 가 정을 적용하였다. 방광 모사 팬텀 실험과 동일하게 상용 방 광 스캐너로 함께 실험하여 비교하였다. 손 동작 스캔은 10 초간 스캔하여 데이터를 수집하였다.
그림 8(a)는 손 동작 스캔에 의해 수집된 데이터를 재배
열하여 합성한 인체 방광의 초음파 영상이며 (b)는 동일한 사람에 대해 상용 방광 스캐너로 기계식 스캔을 하여 얻은 초음파 영상이다. 방광 모사 팬텀처럼 인체에 대해서도 두 방법의 초음파 영상들이 매우 유사하게 보인다. (b)와 다르 게 표시된 (a)의 좌우 여백은 ±60도의 넓은 범위를 기계적 인 스캔하는 상용 방광 스캐너와 달리 좁은 범위를 손 동작 스캔하였기 때문에 데이터가 없는 지역인데 방광을 커버할 수 있는 범위를 충분히 손 동작 스캔하면 되므로 범위 조절 은 자유로이 가능하다. 다만 화질이 방광 모사 팬텀 때보다 는 많이 떨어지지만, 그림 9와 같이 방광 추출 알고리즘을 적용한 결과, 방광의 윗벽과 아랫벽은 두 방법 모두 성공적 으로 추출되었다. 그림 10(b)는 손 동작 스캔 데이터로부터 추출한 3차원 인체 방광의 모습이다.
그림 10. 손 동작 스캔으로 얻어진 초음파 데이터로부터 추출한 3차원 방광 (a) 그림 7(a)의 방광 모사 팬텀 영상에서 추출한 방광. (b) 그림 9(a)의 인체 방광 영상에서 추출한 방광.
Fig. 10. The 3D bladder shapes segmented from hand-motion scan data. (a) The result of segmentation from Fig. 7(a). (b) The result of segmentation from Fig. 9(a).
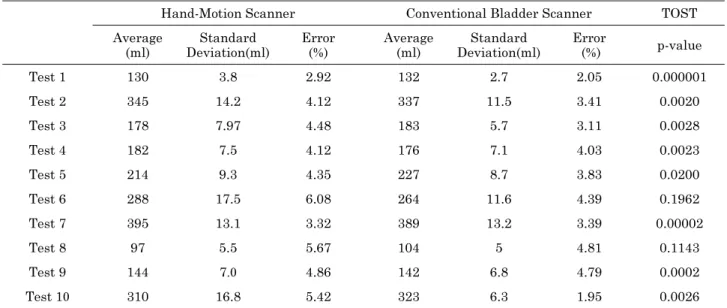
표 2. 인체 방광에 대한 실험 결과
Table 2. Results of the proposed algorithm and the conventional scanner for human bladders
Hand-Motion Scanner Conventional Bladder Scanner TOST
Average (ml)
Standard Deviation(ml)
Error (%)
Average (ml)
Standard Deviation(ml)
Error
(%) p-value
Test 1 130 3.8 2.92 132 2.7 2.05 0.000001
Test 2 345 14.2 4.12 337 11.5 3.41 0.0020
Test 3 178 7.97 4.48 183 5.7 3.11 0.0028
Test 4 182 7.5 4.12 176 7.1 4.03 0.0023
Test 5 214 9.3 4.35 227 8.7 3.83 0.0200
Test 6 288 17.5 6.08 264 11.6 4.39 0.1962
Test 7 395 13.1 3.32 389 13.2 3.39 0.00002
Test 8 97 5.5 5.67 104 5 4.81 0.1143
Test 9 144 7.0 4.86 142 6.8 4.79 0.0002
Test 10 310 16.8 5.42 323 6.3 1.95 0.0026
160
추출된 방광 벽을 이용하여 추정한 인체 방광의 부피 측 정 결과는 표 2와 같다. 인체의 경우에는 참값을 알 수 없 으므로 동일인에 대하여 10회 반복 측정된 결과의 평균치 에 대한 표준 편차의 비율인 오차율로 성능을 비교하였다.
이 오차율이 적으면 측정의 일관성이 높은 것이므로 평균치 에 대한 신뢰성이 높아지는 것으로 판단할 수 있다. 표 2에 서 보듯이 손동작 스캔과 상용 방광 스캐너, 두 방법 모두 비슷한 평균치를 보여주고 있으며 오차율도 두 방법이 비슷 하여 본 논문에서 제안한 손 동작 스캔 방법의 측정 성능이 기존 상용 방광 스캐너에 비하여 크게 차이가 없음을 알 수 있다. 기존 기계식 스캔과 손 동작 스캔 방법의 측정치가 유 사함을 확인하기 위하여 동등성 검정을 위해 많이 사용하는 TOST(Two One-Sided Tests) [12] 를 수행한 결과도 표2에 같이 나타내었다. TOST는 두 측정치의 동등성 범위를 평균 의 10%로 하여 수행하였고 표2에는 TOST의 결과로 주어지 는 2개의 p-value 중 의미가 있는 큰 값만 표시하였다. 표2 에서 보듯이 10개 실험 케이스의 p-value 대부분이 유의 수 준 0.05보다 적어 두 측정치가 동등함을 보여주었다. 다만, 실 험 6과 실험 8, 두 개 케이스의 p-value가 0.1보다 크게 나 왔는데 이 경우는 손 동작 스캔의 범위와 샘플 분포의 영향을 받아 다른 케이스보다 측정치 차이가 커진 것으로 추정한다.
이 두 실험도 TOST에서 동등성 범위를 평균의 15%로 넓히 면 모두 유의 수준 이하로 p-value가 떨어짐을 확인하였다.
V. 결 론
본 논문에서는 환자의 잔뇨 측정을 위한 새로운 형태의 초음파 방광 스캐너를 제안하였다. 병원에서 사용되고 있는 기존의 방광 스캐너는 두개의 모터를 이용하여 기계식 스캔 방법으로 3차원 초음파 영상을 얻는다. 이러한 기계식 스캔 은 기구적으로 복잡하고 부피도 크며 충격에도 약한 단점이 있었다. 이러한 단점을 극복하기 위하여 본 논문에서는 스 캔을 위한 모터와 기구부를 모두 제거하고 모션 센서를 부 착한 후, 손 동작으로 스캔하는 간단한 방광 스캐너를 제안 하였다. 제안한 방법과 기존의 방광 스캐너에 대하여 방광 모사 팬텀 그리고 인체에 대해서 비교 실험을 수행하였고 두 방법의 측정 결과가 매우 유사함을 보여 제안한 방법이 유용함을 입증하였다. 다만, 손 동작 스캔 시에 사용자가 방 광의 전체를 스캔 할 수 있도록 트랜스듀서를 조심스럽게 움직이지 않으면 측정이 제대로 되지 않는다는 단점이 있다.
훈련된 사용자는 10초 이내의 스캔만으로도 비교적 정확한 값을 측정할 수 있지만 비숙련자는 스캔 시간이 길어질 수 있을 것이다. 하지만 사용자의 숙련도가 부족하더라도 충분 한 스캔이 이루어졌다는 것을 소리나 LED로 표시하는 방 법을 더한다면 일부 보완 하는 것도 가능하다.
결론적으로 제안한 손 동작 스캔 방법은 기계적 스캔을 위한 기구물들이 모두 제거되어 하드웨어가 매우 간단해지 고 스캐너의 크기가 더 작아질 수 있으며 제조 비용 역시 더 내려가게 할 수 있다. 다만, 손으로 스캔하기 때문에 측 정 시간이 기존 스캐너보다 다소 길어지지만 장점에 비하여 받아들일만한 단점으로 생각된다. 앞으로 여성 등을 포함한 다양한 환자군에 대한 임상 실험이 수행되어 성능이 더욱 검증되고 보완된다면, 저렴한 제조 가격이라는 가장 큰 장 점은 잔뇨량 측정을 위한 방광 스캐너의 보급을 확장하게 할 것으로 기대한다.
참고문헌
[1] J.H. Holmes, “Ultrasonic studies of bladder,” J. Urol., vol.
97, Issue 4, pp. 654-663, 1967.
[2] J.M. Walton, K.S. Irwin, and G.H. Whitehouse, “Comparison of real-time ultrasonography and magnetic resonance imag- ing in the assessment of urinary bladder volume,” Br. J.
Urol., vol. 78, no. 6, pp. 856-861, 1996.
[3] K.A. Ung, R. White, M. Mathlum, V. Mak-Hau, and R.
Lynch, “Comparison study of portable bladder scanner ver- sus conebeam CT scan for measuring bladder volumes in post-prostatectomy patients undergoing radiotherapy,” J.
Med. Imaging. Radiat. Oncol., vol. 58, no. 3, pp. 377-383, 2014.
[4] J.F. Pedersen, R.J. Bartrum, and C. Grytter, “Residual urine determination by ultrasonic scanning,” Am. J. Roentgenol.
Radium. Ther. Nucl. Med., vol. 125, no. 2, pp. 474-478, 1975.
[5] J. Kjeldsen-Kragh, “Measurement of Residual Urine Volume by Means of Ultrasonic Scanning : A Comparative Study,”
Paraplegia., vol. 26, no. 3, pp. 192-199, 1988.
[6] G.J. Poston, A.E. Joseph, and P.R. Riddle, “The accuracy of ultrasound in the measurement of changes in bladder vol- ume,” Br. J. Urol., vol. 55, no. 4, pp. 361-363, 1986.
[7] E.A. Kiely, G.G. Hartnell, R.N. Gibson, and G. Williams,
“Measurement of bladder volume by real-time ultrasound,”
Br. J. Urol., vol. 60, no. 1, pp. 33-35, 1987.
[8] V. Chalana, S. Dudycha and G. McMorrow, “Image enhance- ment and segmentation of fluid-filled structures in 3D ultra- sound images,” Proc. of SPIE 5032, San Diego, California, United States, May, 2003, pp. 500-506.
[9] W.T. Higgins, “A comparison of complementary and Kal- man filtering,” IEEE Trans. Aerosp. Electron. Syst., vol.
AES-11, no. 3, pp. 321-325, 1975.
[10] B.B. Graham, “Using an Accelerometer Sensor to Measure Human Hand Motion,” Master Thesis, MIT, 2000.
[11] T.S. Cho, S.Y. Lee, and M.H. Cho, “A New Algorithm to Estimate Urine Volume from 3D Ultrasound Bladder Images,” J. Biomed. Eng. Res., vol. 37, no. 1, pp. 31-38, 2016.
[12] D.J. Schuirmann, “A comparison of the Two One-Sided Tests Procedure and the Power Approach for assessing the equivalence of average bioavailability,” J. Pharmacokinet.
Biopharm., vol. 15, no. 6, pp. 657-680, 1987.