1. 서론
함정 전투체계 개발에서 모의 전투실험 수행의 목적은 전투체계의 성능 요구사항에 대한 적합성을 검증하고, 적 절한 체계 설계가 이루어질 수 있도록 유도하는데 있다. 따라서 전투실험에 참여하는 플랫폼 및 탑재 장비(전
투체계, 센서, 무장)에 대한 신뢰성 향상을 위하여 실제 장비의 알고리즘을 모델화하는 노력이 진행되고 있으며, 전투실험 결과에 대한 사후분석으로 임무효과도 및 체계 성능 도출 기법이 널리 활용되고 있다(DAPA, 2007).
표적 탐지능력, 무장 교전능력 등의 체계성능 도출을 위해서는 전장 환경의 위협 객체와 센서에서 탐지한 표 적간의 연관 관계를 식별해주는 정보가 필요하다. 기존의 공학급 모델 연동 시뮬레이터의 경우는 주로 객체정보에 미분방정식을 적용하여 탐지 표적을 모델링하므로 이러 한 객체-표적 연관정보를 사뮬레이터에서 자체적으로 제 공한다(Hong et al. 2010). 그러나 본 연구에서 사용된 교전 시뮬레이터는 소나센서모델에 실제 소나시스템의
잠수함 교전 시뮬레이션의 사후분석을 위한 객체와 소나 표적간의 연관 기법
김준형 ・ 배건성†
Association between Object and Sonar Target for Post Analysis of Submarine Engaged Warfare Simulation
Junhyeong Kim ・ Keunsung Bae
†ABSTRACT
We propose a method to generate the object-target identifier mapping information for system performance and effectiveness analysis of submarine engage system and verify the validity of the proposed method through experiments. In the submarine model of the engage simulator, the signal processing algorithm of the actual sonar system is installed. In the target information obtained through the sonar or signal processing process, the actual object information is not known, and the simulator does not provide such information. Therefore, in this study, we generated identifier mapping information for simulation post-analysis by using bearing, range, and speed of the target obtaind from sonar signal processing and the object collected.
Key words : Defense modeling and simulation, Analysis of system effectiveness, Object and Target, Association
요 약
함정 전투실험의 사후분석에서는 객체에 대한 자함의 표적 탐지능력와 무장 교전능력을 분석한다. 따라서 사후분석을 위 해서는 전장 환경의 위협 객체와 센서에서 탐지한 표적간 연관 맺을 수 있는 정보가 필요하다. 기존의 공학급 교전 시뮬레이 터는 이러한 객체-표적 연관정보를 제공하였다. 그러나 사용된 시뮬레이터의 잠수함모델에는 실제 소나시스템의 신호처리 알 고리즘이 탑재되어있다. 소나신호처리 과정을 통해 얻은 표적정보에서는 실제 객체정보가 무엇인지 연관지을 수 없으며, 사용 된 시뮬레이터도 그러한 정보를 제공하지 않고 있다. 따라서 본 연구에서는 객체정보와 소나신호처리에서 얻은 표적의 방위 각, 거리, 속도 등의 기동정보를 이용하여 객체-표적 연관정보를 생성하였다. 객체-표적 연관정보를 생성하는 방법을 제안하 고, 제안한 방법의 타당성을 실험을 통해 검증하였다.
주요어 : 교전 시뮬레이션, 체계 효과도 분석, 객체 및 표적, 연관
Received: 21 March 2017, Revised: 07 August 2017, Accepted: 04 September 2017
†Corresponding Author: Keunsung Bae E-mail: [email protected]
School of Electronics Engineering, Kyungpook National University, Daegu, Korea
김준형 ・ 배건성
신호처리 알고리즘이 탑재되어 있다. 이 경우에는 잠수함 의 엔진 정보, 방사소음 정보, 도플러에 의한 자함과 표적 거리간의 신호감쇄 등의 표적 특징정보에 대한 신호를 생성하고 합성한 후에 소나표적을 생성하기 때문에 모의 된 표적과 연관된 객체를 알 수 없게 된다(Jo, 2013;Jung et al. 2013). 따라서 본 논문에서는 사후분석 단계에서 필요로 하는 객체-표적간의 연관정보를 생성하는 방법을 연구하였다. 객체정보와 소나신호처리에서 얻은 표적의 방위각, 거리, 속도 등의 기동정보를 이용하여 객체-표적 간의 연관정보를 생성하는 방법을 제안하고, 제안한 방법 의 타당성을 실험을 통해 검증하였다.
본 논문의 구성은 다음과 같다. 2장에서 본 연구에 사 용된 교전 시뮬레이터 및 사후분석을 간략하게 소개하고, 3장에서는 제안한 객체-표적간의 연관정보를 생성하는 방법에 대해 설명한다. 4장에서는 제안한 방법의 타당성 에 대하여 실험을 통해 검증하였다. 마지막으로 결론을 맺는다.
2. 교전 시뮬레이터 및 사후분석
2.1 교전 시뮬레이터 소개
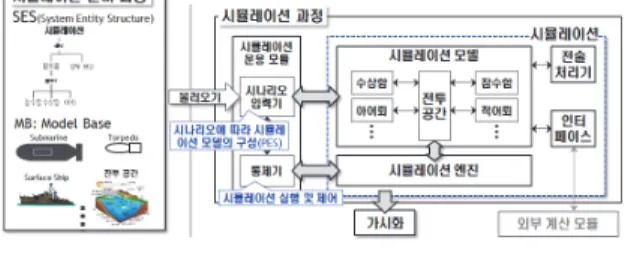
본 연구를 수행하기 위해서는 객체 및 장비의 모델링, 기동 시나리오 작성, 시뮬레이션 실행, 결과분석과 같은 일련의 M&S 수행이 가능한 툴이 필요하다. 연구에 이용 된 교전 시뮬레이터 및 분석장치는 플랫폼 및 탑재 센서/ 무장의 속성 편집, 시나리오 생성, 실행, 사후분석이 가능 한 교전급 시뮬레이터로써 Zeigler, Praehofer가 제안한 모델 구조에 따른 시뮬레이션 커널이 적용되었다(Lee and Ha, 2012). Figure 1은 시뮬레이터 GUI이고, 시뮬레 이션의 준비과정과 동작원리는 Figure 2에서 보여준다.
시뮬레이터 연동 구성품과 구성품별 기능 특징은 Table 1 에 정리하였다.
Fig. 1. Engagement simulator and analyzer
Fig. 2. Simulation Kernel Table 1. Simulator interlocking model
2.2 사후분석에서 객체-표적간의 연관 정보 필요성 사후분석 단계에서는 자함 임무에 대한 효과도를 분석 한다. 효과도 분석은 실제 세계에서 무기체계 설계 및 운 용개념을 평가하는데 많이 사용되는 중요한 대안분석 방 법론으로 효과도, 체계 및 장비의 성능치를 도출한다.
함정 설계 및 획득을 위한 군사 효과분석 및 의사결정 프레임워크에 관한 연구에서 효과도(MOEs: Measures of Effectiveness), 성능치(MOPs: Measures of Performance) 를 다음과 같이 정의하고 있다(Hootman and Whitcomb, 2005).
• MOPs는 물리적 측정치로부터 계산되는 척도이다.
• MOEs는 MOPs로부터 계산되는 체계의 운용적 수 행도(operational performance)를 나타내는 척도이 며 보통 확률로 나타냄을 선호한다.
객체-표적 연관정보가 필요한 이유를 설명하기 위해서 최관선 등의 연구에서 제시하는 MOEs/MOPs 구조를 기 반으로 하는 소나 탐지성능에 대한 MOEs/MOPs 및 계 산수식을 Table 2에 나타내었다(Choi, 2012). 계산수식 에서 탐지 객체는 시뮬레이션에 참여한 다수 객체 중에 서 센서가 탐지하고 표적으로 표적화한 객체만을 의미한 다. 이때 표적화에 관련된 객체가 어떤 것인가를 알려주 는 객체-표적간의 맵핑 정보를 필요로 한다.
Table 2. Examples of detection performance of sonar
Figure 3a와 같이 객체정보에 미분방정식을 이용하여 표적을 모의하는 경우는 센서 모델에서 객체-표적 연관 정보를 제공할 수 있으며, 이 정보를 이용하여 사후분석 에서 체계성능 및 효과도 분석이 가능하였다. 김태규 등 의 연구에서 기존에 검증 및 활용된 방정식 기반의 소나 모델을 적용하여 어뢰체계의 운용성능을 분석했다(Kim, 2014;Shin 2007). 그러나 Figure 3b의 소나 신호처리 알 고리즘에 의하여 신호를 생성하고 합성하여 소나표적을 생성하는 경우에는 모의된 표적과 연관된 객체를 확신할 수 없게 된다. 따라서 사후분석 단계에서 추가적으로 객 체정보와 표적정보를 이용하여 객체-표적 연관정보를 생 성하도록 하였다.
Fig. 3. Method for Creationg Target of Simu
3. 객체-표적간의 맵핑 알고리즘
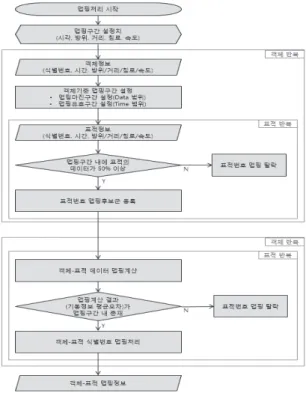
사후분석에서 객체-표적 연관정보를 생성하기 위한 방 안으로 객체-표적 맵핑 알고리즘을 제안하였다. 임의 객 체를 기준으로 맵핑구간을 설정하고, 탐지된 모든 표적을 대상으로 맵핑구간 내에 데이터가 50% 이상 존재하면 맵핑후보군 표적으로 선별한다. 선별된 표적에 한하여 객 체와 부합되는 정도를 계산하여 평균 오차값을 구한다. 이 값이 객체의 맵핑구간 내에 존재하는 표적은 객체와
연관성이 높은 것으로 보고 해당 객체와 표적의 번호를 맵핑정보로 저장한다. 맵핑 알고리즘의 데이터 처리 과정 을 Figure 4에 나타내었다.
Fig. 4. Flow chart for identifier mapping processing
3.1 입력 데이터
맵핑 알고리즘에 입력하는 데이터는 다음과 같다.
• 시뮬레이션에 참여된 객체정보(Object Information)
• 소나모델에서 탐지한 표적정보(Track Information)
• 맵핑구간 설정값(Mapping Zone Value)
객체정보는 객체모델에서 부여하는 고유 식별번호와 실제 플랫폼이 기동한 방위, 거리, 침로, 속도를 가진다.
소나 표적정보는 소나센서모델에서 부여하는 별도의 고 유 식별번호와 방위, 거리, 침로, 속도와 같은 탐지값을 가진다. 맵핑구간 설정치는 맵핑계산이 이루어질 시간과 데이터 범위 설정에 이용된다.
3.2 맵핑구간 설정
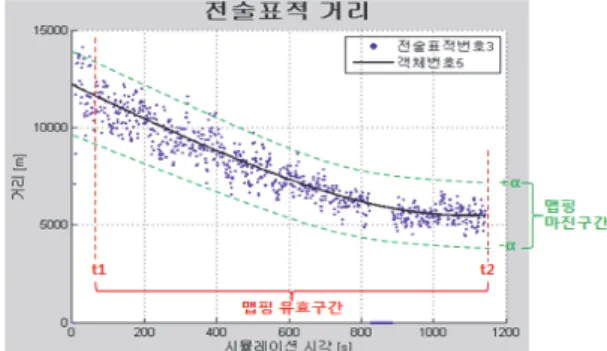
맵핑구간은 임의 객체의 데이터를 기준으로 설정되며 맵핑마진구간과 맵핑유효구간으로 구성된다. Figure 5는 임의의 객체인 객체#5의 거리 데이터를 기준으로 맵핑구 간이 설정된 것을 보여준다.
김준형 ・ 배건성
맵핑마진구간(Y축 데이터 범위)은 객체 데이터를 기 준으로 +/- 마진 설정치가 적용된 영역이다. 표적의 데이 터 평균값이 맵핑마진구간 내에 존재하면 객체와 연관된 것으로 판단하고, 맵핑마진구간 밖에 존재하면 객체와 연 관성이 낮은 것으로 판단한다. 맵핑마진구간의 폭이 좁을 수록 맵핑 판단에 대한 신뢰도가 높아진다.
맵핑유효구간(X축 시간 범위)은 표적 생성 초기의 불 안정한 표적 데이터를 맵핑계산에서 제외하기 위한 목적 으로 설정한다. 탐지 초기시점의 표적정보에서는 진동 (Oscillation) 하는 데이터가 관찰되는데, 이러한 데이터 는 맵핑결과를 부정확하게 하는 요소이므로 계산에서 배 제하도록 하였다. 실험치 관찰결과 표적생성 초기시점에 는 불안정 데이터가 존재하였다. 따라서 표적생성 후 X 초부터 표적삭제까지를 맵핑유효구간으로 설정하였다.
Fig. 5. Setting object-based mapping value intervals
3.3 맵핑후보군 선정
맵핑후보군 선정은 실제 맵핑계산에 참여하는 표적 개 수를 줄이기 위한 방안이다. 임의 객체에 대하여 모든 표 적이 맵핑계산에 참여하게 되면, 계산량과 소요시간이 늘 어난다. 그래서 객체의 맵핑구간 내에 데이터가 50% 이 상 존재하는 표적을 맵핑후보군으로 식별하고, 맵핑후보 군 표적만 맵핑계산에 참여시켰다. Figure 6은 방위 데이 터를 이용하여 객체#2에 대한 맵핑후보군 표적을 식별한
Fig. 6. Mapping candidate group Identification result
결과를 보여준다. Figure 6a에 전체 탐지표적 83개를 도 식하였고, Figure 6b는 객체#2의 맵핑후보군으로 식별된 표적 8개를 도식한 것이다.
3.4 객체-표적간의 맵핑과정
맵핑후보군 선정 후에 맵핑구간에 존재하는 표적별 데 이터 개수가 다르기 때문에 객체와 표적의 시각별 오차 를 계산하여 평균 오차를 구한다. 그런 다음 표적의 평균 오차 값이 맵핑마진구간 내에 존재하면 객체와 해당 표 적을 맵핑한다. Figure 7a는 객체#2와 맵핑후보군 표적(8 개)의 방위 데이터를 도식한 것이고, Figure 7b는 맵핑계 산 결과로 최종 맵핑된 객체#2와 표적#3의 방위 데이터 를 도식한 것이다. 최종 맵핑된 객체와 표적의 방위 데이 터를 보면 기동 패턴이 가장 유사한 객체와 표적이 최종 맵핑된다는 것을 확인할 수 있다. Figure 8에 맵핑과정에 사용되는 수식을 나타내었다.
Fig. 7. Mapping processing result by using the bearing
Fig. 8. Mapping processing formula
4. 실험 및 검토
사후분석 단계에서 제안한 맵핑 알고리즘을 통한 객체 -표적간의 연관정보 생성을 확인하기 위하여 다양한 기
동 시나리오에 대해 맵핑실험을 수행하였다. Figure 9와 같이 3가지 객체 기동 상황에 대하여 시뮬레이션을 수행 하고 그 결과에 대해 객체-표적간의 맵핑처리를 하였다.
하늘색은 자함 이고, 붉은색은 적 표적의 객체이다. 붉은 실선은 적 객체의 기동방향을 표시한 것이다. Figure 9a 는 2개의 적 객체가 자함에 접근하며 방위를 교차하는 경우이며, Figure 9b는 2개의 적 객체가 방위는 근접하 면서 거리 간격은 유지한 상태로 동일 침로로 기동한다. Figure 9c는 2개의 적 객체가 방위는 근접하면서 자함에 다른 속도로 접근하는 경우이다. 맵핑처리를 위해 적용한 맵핑구간 설정치는 Table 3과 같다.
Fig. 9. Scenario for object maneuvering Table 3. Value usd for setting the mapping interval
4.1 객체간 방위교차 기동에서 맵핑
Figure 9a 시나리오 실행에 대한 결과로 객체#2, 객체
#3에 대하여 83개의 표적이 탐지되었다. 방위, 거리, 침 로, 속도에 대하여 객체별로 모든 표적과 맵핑처리를 수 행하였다.
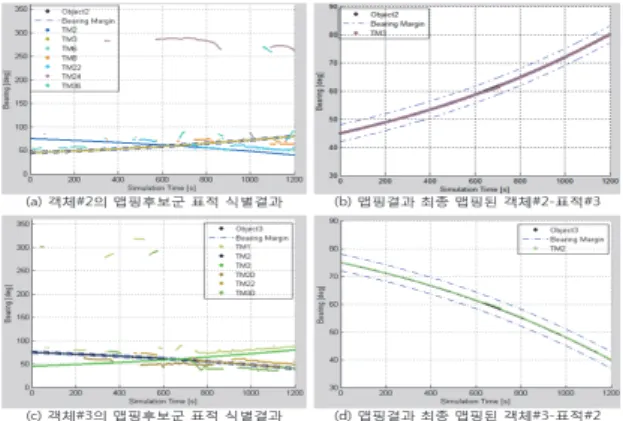
Figure 10은 방위값을 이용한 객체와 표적간의 맵핑처 리 과정을 보여준다. Figure 10a는 탐지표적 83개에 대하 여 객체#2와 맵핑후보군을 식별한 결과이다. 객체#2의 맵핑후보로 식별된 표적은 8개이다. Figure 10b는 객체
#2와 맵핑후보 표적간 맵핑계산 결과이다. 최종 맵핑된 객체#2와 표적#3의 방위 기동이 유사함이 확인된다. 마 찬가지로 Figure 10c, Figure 10d는 객체#3에 대한 표적 맵핑처리 과정을 보여주고 있으며, 최종 맵핑된 객체#3 과 표적#2의 방위 기동이 유사하다. Figure 11은 침로값 을 이용한 맵핑처리 과정을 나타내었다. Table 4에서 맵 핑계산 결과 값을 정리하였다. 음영 표시된 셀은 평균 오
Fig. 10. Mapping process using the bearing
Fig. 11. Mapping process using the course Table 4. Mapping calculation result using bearing, course
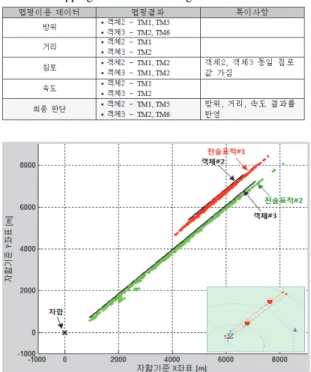
Fig. 12. Final mapping result
김준형 ・ 배건성
차 값이 맵핑구간 내에 포함된 것으로써 해당 표적은 객 체와 맵핑이 가능함을 의미한다. Figure 12는 맵핑된 객 체와 표적을 XY좌표로 변환하여 표시한 것이다. 객체 및 맵핑된 표적의 기동이 유사함을 확인 할 수 있다.
4.2 객체간 근접방위, 거리이격 기동에서 맵핑 Figure 9b 시나리오 실행에 대한 결과로 객체#2, 객체
#3에 대하여 9개의 표적이 탐지되었다. 방위, 거리, 침로, 속도에 대하여 객체별로 모든 표적과 맵핑처리를 수행하 Table 5. Mapping calculation results using bearing, course
Table 6. Mapping results for bearing and course
Fig. 13. Final mapping result
였고, 맵핑계산한 결과를 Table 5에 정리하였다. Table 5 에서 음영 표시한 셀은 객체-표적간의 계산 결과가 맵핑 으로 판단된 부분이다. 최종 판단된 객체-표적 연관정보 는 Table 6과 같다. Figure 13은 맵핑결과로 얻어진 연관 정보로 객체와 표적 데이터를 XY좌표로 변환하여 표시 한 것이다. 차트를 통하여 객체 및 연관된 표적의 기동이 유사하다는 것을 확인 할 수 있다.
4.3 객체간 근접방위, 다른속도 기동에서 맵핑 Figure 9c 시나리오 실행에 대한 결과로 객체#2, 객체
#3에 대하여 8개의 표적이 탐지되었다. 방위, 거리, 침로, Table 7. Mapping calculation results using bearing, course
Table 8. Mapping results for bearing and course
Fig. 14. Final mapping result
속도에 대하여 객체별로 모든 표적과 맵핑처리를 수행하 였고, 맵핑계산한 결과를 Table 7에 정리하였다. 객체-표 적간의 계산 결과가 맵핑으로 판단된 부분을 음영으로 표시하였다. 최종 판단된 객체-표적 연관정보는 Table 8 과 같다. Figure 14는 맵핑결과로 얻어진 연관정보로 객 체와 표적 데이터를 XY 좌표 로 변환하여 표시한 것이 다. 앞에서와 마찬가지로 차트를 통하여 객체 및 연관된 표적의 기동이 유사함을 확인 할 수 있다.
5. 결론 및 향후연구과제
본 연구에서는 교전 시뮬레이션에서 객체-표적간의 연 관정보를 제공하지 않는 경우, 사후분석 단계에서 이러한 정보를 추가 생성하는 방안을 연구하였다. 객체정보와 소 나신호처리에서 얻은 표적의 방위각, 거리, 속도 등의 기 동정보를 이용하여 객체-표적간의 연관정보를 생성하는 맵핑 알고리즘을 제안하였다. 다양한 객체 기동에 대한 맵핑 실험을 통하여 제안한 알고리즘의 타당성을 검증하 였다. 실험결과의 분석을 통해 제안한 맵핑 알고리즘은 다양한 객체 기동에 대하여 유의미한 객체-표적간의 연 관정보를 제공해 줄 수 있음을 확인하였다.
본 연구는 기존의 국방 M&S분야 전투실험에서 교전 시뮬레이터에 실제 신호처리 알고리즘이 적용되는 센서 모델을 탑재할 경우 고려되지 못했던 점을 대상으로 했 다는 것과 사후분석 단계에서 객체-표적간의 연관정보를 제공하는 방안을 제시했다는 것에 의의를 둘 수 있다.
본 연구의 한계점으로는 객체 기동 패턴별 맵핑처리에 사용할 적합한 형태의 데이터(방위/거리/침로/속도)를 자 동으로 선정하지 못했다는 것에 있다. 향후 연구에서는 기동 패턴별 특징을 반영하여 맵핑처리에 적합한 데이터 형태를 자동 선택 /적용하도록 연구할 필요가 있다.
References
Defense Acquisition Program Administration (2007),
"A Study on the M&S need and Application of Research and Development Stage in Weapon system", Report, doi: http://www.prism.go.kr/homepage/
research Common/downloadResearchAttachFile.do?
work_key=001&file_type=CPR&seq_no=001&pdf_
conv_yn=N&research_id=1690000-200700005 (Download March 17, 2017)
(방위사업청 (2007), “무기체계 연구개발 단계별 M
&S체계 소요 및 활용방안 연구”, 연구보고서) Jeong Hee Hong, Tag Gon Kim (2010), "Interoperation
between Engineering and Engagement Level Models for MOE and MOP Analysis", Journal of the Korea Society for Simulation, 19(4), 319-326
(홍정희, 김탁곤 (2010), “체계 효과도 분석을 위한 공학/교전 모델 연동 시뮬레이션 기술 연구”, 한국시 뮬레이션학회논문지, 19(4), 319-326)
Gyu Seong Jo (2013), "Implementation of Submarine Combat System Simulator Applying Communication Middleware", Master Thesis, Kyungpook National University, Daegu, Korea
(조규성 (2013), “통신 미들웨어를 적용한 잠수함 전 투체계 시뮬레이터 개발”, 석사학위논문, 경북대학 교, 대구, 대한민국)
Young-Cheol Jung, Byoung-Uk Kim, Sang-Kyum An, Woo-Jae Seong, Keun-Hwa Lee, Joo-Young Hahn (2013), "An Algorithm for Submarine Passive Sonar Simulator", Journal of the Acoustical Society of Korea, 32(6), 472-483
(정영철, 김병욱, 안상겸, 성우제, 이근화, 한주영 (2013), "잠수함 수동소나 시뮬레이터 알고리즘", 한 국음향학회지 32(6), 472-483)
Gyu Yeol Lee, Sol Ha, "Modeling and Simulation Technology for Performance Analysis of Submersibles' Manoeuvrability", Bulletin of the Society of Naval Architects of Korea, 49(3), 6-12
(이규열, 하솔 (2012) “수중운동체 성능 분석을 위한 모델링 및 시뮬레이션 기술”, 대한조선학회지, 49(3), 6-12
John C. Hootman and Cliff Whitcomb (2005), "A Military Effectiveness Analysis and Decision Making Framework for Naval Ship Design and Acquisition", Naval Engineers Journal Summer 2005, doi:
http://dx.doi.org/10.1111/j.1559-3584.2005.tb00360.x (Accessed March 17, 2017)
Kwan Seon Choi (2012), "A Case Study of Effectiveness Analysis of Naval Combat System Design", Korea Association of Defense Industry Studies, 19(2), 38-51
(최관선 (2012) “해군 전투체계 설계위한 효과도 분 석 사례 연구”, 한국방위산업학회, 19(2), 38-51) Tae kyoo Kim (2014), "System Operational Performance
김준형 ・ 배건성
Analysis for Wire-Guided Torpedo", Journal of the Korea Society for Simulation, 23(2), 61-68 (김태규 (2014) “선유도어뢰 체계운용성능분석 기 법”, 한국시뮬레이션학회논문지, 23(2), 7-15) Ji hwan Shin (2007), "On the Development of
Authoritative Representations of Torpedo Systems for Engagement Level Simulation", Journal of the Korea Society for Simulation, 16(3), 19-28 (신지환 (2007) “교전수준 어뢰체계 표준모델 개발 방안 연구”, 한국시뮬레이션학회논문지, 16(3), 19-28) Su Hyoung Lee, Sang Bae Park, Ik Su Seo (2013),
“Analysis of Bearing Error Related to Beamwidth
and Fusion Tracking Filter Taking Into Account It”, Journal of Korean Institute of Information Technology, 11(12), 105-113
(이수형, 박상배, 서익수 (2013) “빔폭에 대한 방위각 오차 분석 및 이를 고려한 융합추적필터”, 한국정보 기술학회논문지, 11(12), 105-113
Su Hyoung Lee (2014), "Sequential Fusion Technique based on Maximum A Posteriori Probability", Journal of Knowledge Information Technology and Systems, 8(1), 61-68
(이수형 (2014) “최대 사후확률에 기반 한 순차적 융 합 기법”, 한국정보기술학회논문지, 8(1), 61-68)
김 준 형 ([email protected]) 2010 경북대학교 전자전기컴퓨터학부 공학사 2016 경북대학교 전자공학부 공학석사 2010~ 현재 한화시스템 해양연구소 근무
관심분야 : 전투실험, 효과도 분석, 데이터베이스, 디지털 신호처리
배 건 성 ([email protected])
1977 서울대학교 공과대학 전자공학과 공학사 1979 한국과학기술원 전자공학과 공학석사 1989 University of Florida 공학박사 1990 경북대학교 전자공학과 부교수 1995~ 현재 경북대학교 전자공학부 교수
관심분야 : 디지털 신호처리, 음성 신호처리, 디지털 통신