ⓒ IEMEK J. Embed. Sys. Appl. 2017 Apr. 12(2) 71-77 ISSN : 1975-5066
http://dx.doi.org/10.14372/IEMEK.2017.12.2.71
Ⅰ. 서 론
감시 레이더 시스템은 일정 공간에 전자파를 송 신한 후 특정 물체에 반사되어 돌아오는 신호를 이 용하여 타겟을 탐지하고 감시할 수 있는 시스템이 다. 따라서, 초음파 센서 또는 카메라 센서가 동작 하기 어려운 환경, 즉, 원거리 또는 시계가 확보되지 않는 환경에서도 탐지가 가능한 장점을 갖는다 [1].
한편, 레이더를 이용한 이동타겟 탐지 방식으로 CW (Continuous Wave) 레이더와 FMCW
(Frequency Modulated Continuous Wave) 레이더 방식이 주로 사용된다. CW 레이더는 타겟의 이동 유무와 속도가 탐지 가능하지만 거리를 측정하지 못하는 단점이 있다. 이에 비해 FMCW 레이더는 거리, 속도를 동시에 측정할 수 있다. FMCW 레이 더는 주파수가 일정하게 변조된 첩 신호를 연속적 으로 송신하고, 타겟에 부딪혀 반사된 신호를 수신 하고, 수신신호와 송신신호와의 변화를 이용하여 타 겟의 정보를 획득한다.
이동타겟의 정보를 획득하기 위한 대표적 알고 리즘으로, 2D (Dimensional) FFT (Fast Fourier Transform) 방식을 예로 들 수 있다 [2]. 2D FFT 알고리즘은 각 첩을 FFT 한 후, 그 결과를 재차 FFT함으로써, 이동 타겟의 거리 및 속도정보를 탐 지한다. 하지만, 1D FFT에 비해 확연히 높은 복잡 도를 갖는 단점 또한 존재한다. 현실적으로, 감시레 이더 시스템에서는 타겟의 매 시간 거리나 속도 정 보보다 타겟의 존재유무를 파악하는 것이 우선순위 가 높다. 즉, 타겟의 존재 유무와 관계없이, 2D FFT 진 영 석, 현 유 진, 김 상 동, 김 봉 석, 이 종 훈
*
(YoungSeok Jin, Eugin Hyun, Sangdong Kim, Bong-seok Kim, Jonghun Lee)
Abstract: This paper proposes a low complexity frequency modulated continuous wave (FMCW) surveillance radar algorithm. In the conventional surveillance radar systems, the two dimensional (2D) fast Fourier transform (FFT) method is usually employed in order to detect the distance and velocity of the targets. However, in a surveillance radar systems, it is more important to immediately detect the presence or absence of the targets, rather than accurately detecting the distance or speed information of the target. In the proposed algorithm, in order to immediately detect the presence or absence of targets, 1D FFT is performed on the first and M-th bit signals among a total of M beat signals and then a phase change between two FFT outputs is observed. The range of target is estimated only when the phase change occurs. By doing so, the proposed algorithm achieves a significantly lower complexity compared to the conventional surveillance scheme using 2D FFT. In addition, show in order to verify the performance of the proposed algorithm, the simulation and the experiment results are performed using 24GHz FMCW radar module.
Keywords : FMCW radar, Low complexity, Surveillance radar, 2D FFT, Phase difference
*Corresponding Author ([email protected]) Received: Mar. 4 2017, Revised: Mar. 22 2017, Accepted: Mar. 24 2017.
Y.S. Jin, E. Hyun, S.D. Kim, B.S. Kim, J.H.
Lee: DGIST
※ 본 연구는 미래창조과학부에서 지원하는 대구 경북과학기술원의 기관고유사업 (17-IT-01)에 의 해 수행되었습니다.
그림 1. 기존의 2D FFT를 사용한 FMCW 감시레이더 알고리즘 [3]
Fig. 1 Conventional surveillance FMCW radar using 2D FFT
를 이용하여 매 순간의 속도와 거리를 추정하는 것 은 매우 비효율적이라 할 수 있다.
따라서, 제안하는 알고리즘은 매 순간마다 복잡 도가 높은 2차원 FFT 방식을 사용하는 대신, 두 개의 첩신호의 위상차이를 이용하여 이동하는 타겟 을 탐지하고 거리를 추정하는 방법이다. 즉 탐지타 겟의 존재유무를 판별하기 위해서 총 M개의 비트신 호 가운데, 두 개의 비트신호에 대해 1차원 FFT를 수행하고, 2개의 FFT 결과로부터 위상변화를 관찰 한다. 위상변화가 있을 때에 타겟이 존재한다고 판 단하고, 이때에만 타겟의 거리를 추정함으로써, 2차 원 FFT 방식에 비해서 낮은 복잡도를 갖는다. 제안 하는 알고리즘의 성능을 검증하기 위해, 전산모의실 험과 실제 24GHz FMCW 레이더 모듈을 이용한 실 험을 수행했다.
Ⅱ. 저복잡도 FMCW 감시레이더 알고리즘
1. 기존의 2D FFT를 이용한 FMCW 감시레이더 방식
그림 1은 기존의 2D FFT 기반 FMCW 감시레 이더 알고리즘을 보인 것이다. 거리를 추정하기 위 해 먼저 총 M개의 첩 신호에 대해 각각 N point FFT를 수행한다. 속도를 추정하기 위해, 그 출력에 대해 시간 방향으로, M point FFT를 수행한다. 2D FFT를 이용하여 2D 맵을 획득하고, 획득한 2D 맵 으로부터, 다수 타겟에 대한 거리 및 속도 정보를 획득할 수 있다.
그림 2. 정지타겟인 경우의 1, 2, 3번째 첩신호 Fig. 2 1st, 2nd and 3rd chirps in the case
of the single stationary target
그림 3. 정지타겟 일 때, 각 첩의 150번째 진폭값
Fig. 3 150th amplitude of each chirp in the case of stationary target
2. 제안하는 듀얼첩간의 위상차이를 이용한 저 복잡도 FMCW 감시레이더 알고리즘
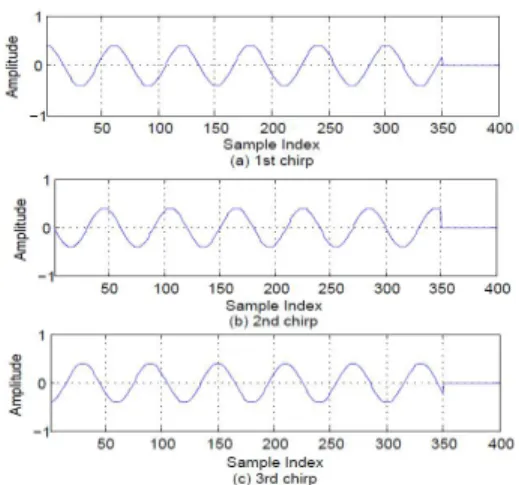
2.1 타겟의 이동에 따른 신호의 변화 특성 FMCW 레이더에서는 타겟이 존재하지 않거나, 타겟이 정지되어 있을 때에, 수신된 다수의 첩 신호 의 위상에는 변화가 없다. 그림 2는 타겟이 정지해 있는 경우 FMCW 레이더의 첫 번째, 두 번째, 세 번째 첩 신호의 비트신호를 보인 것이다. 그림 2에 서 보인대로, 신호의 위상에는 변화가 없음을 알 수 있다.
그림 3은, 정지타겟인 경우, 각 첩의 150번째의 진폭값들이다. 그림 2에서 보인 바와 같이, 시간에 따른 신호의 변화가 없기 때문에, 각 첩의 150번째 의 진폭값들의 변화가 없음을 관찰할 수 있다.
그림 4. 이동타겟인 경우의 1, 2, 3번째 첩신호 Fig. 4 1st, 2nd and M th chirps in the case
of single moving target
그림 5. 이동타겟 일 때, 각 첩의 150번째 진폭값
Fig. 5 150th amplitude of each chirp in the case of moving target
그림 4는 타겟이 이동하는 경우 1, 2, M 번째 첩의 신호를 보인 것이다. 그림 2와는 다르게, 동일 인덱스에서 각 첩의 위상이 변화함을 알 수 있다.
즉, 각 첩에 따라 위상차이가 존재한다. 왜냐하면, 타겟이 이동할 경우 속도를 가지고, 도플러 변화에 의해 각 첩의 위상이 변하기 때문이다.
그림 5는 이동타겟인 경우, 각 첩의 150번째의 진폭값들이다. 특히, 각 첩의 동일한 인덱스에 따른 위상을 보면 특정 주파수를 갖는 정현파의 형태를 가짐을 알 수 있다. 즉, 이 주파수는 이동속도에 따 른 도플러 변화에 비례하는 특성을 갖는다.
2.2 제안하는 저복잡도 FMCW 레이더 알고리즘 제안하는 알고리즘에서는 타겟이 이동하는 경우
그림 6. 제안하는 듀얼 첩 신호간의 위상차이를 이용한 저복잡도 FMCW 감시레이더의 구조 Fig. 6 The proposed FMCW surveillance radar algorithm using the phase difference
of dual chirps
첩 신호의 위상이 변하는 특성을 탐지하기 위해서 두 개의 첩 신호간의 위상 차이를 연산 및 탐지함 으로써 타겟의 존재 및 이동유무를 판별하고, 이때 타겟의 거리를 추정한다. 이때, 두 첩의 선택은 탐 지 타겟의 속도에 의해 적절히 설정한다고 가정한 다. 감시레이더의 경우 매 순간 마다 타겟의 거리나 속도를 탐지하는 대신, 타겟이 이동하는 경우를 감 지하고, 이때 타겟의 거리 정보를 탐지한다. 그림 6 은 제안하는 알고리즘의 구조를 보인 것이다. 즉, 제안하는 알고리즘은 다음과 같다.
1단계: 고려하는 대상의 속도를 고려하여, 두 첩 의 비트신호 획득
2단계: 각 첩에 대해 N point FFT를 수행
3단계: 두개의 첩 FFT 결과의 빼기연산 수행 (두 첩의 선택은 탐지 대상의 이동속도에 따라 적절히 설정)
4단계: 3단계 결과에 절대값 연산 후 첨두치 검 출 (위상 차이의 최대치값) 후 임계치값과 비교
5단계: 이동타겟의 유무판정
- 임계치보다 작은 경우, 탐지 타겟 없음으로 판단 - 임계치보다 큰 경우, 타겟의 거리탐지
Ⅲ. 모의 전산 실험 및 복잡도 비교
1. 전산실험에 의한 탐지 결과
본 절에서는 제안하는 알고리즘의 성능을 검증 하기 위해 모의 전산 실험을 수행한다. 성능 검증을 위해, 타겟이 정지한 경우와 이동하는 경우의 제안
그림 7. 제안하는 알고리즘에 의한 정지 타겟의 탐지에 대한 전산실험 결과
Fig. 7 Simulated detection result of the proposed algorithm for single stationary target
0 5 10 15 20 25 30 35 40 45 50
0 0.5 1 1.5 2 2.5 3 3.5
4x 105
X: 5.273 Y: 1.967e+05
Range
P S D
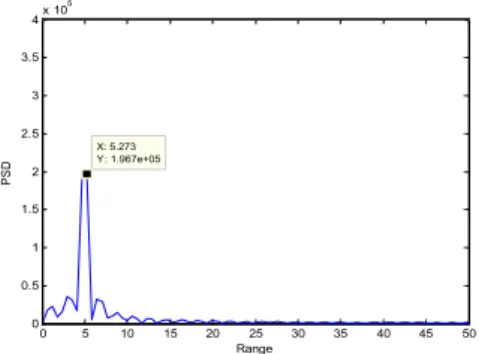
그림 8. 제안하는 알고리즘에 의한 이동 타겟의 탐지에 대한 전산실험 결과
Fig. 8 Simulated detection result of the proposed algorithm for single moving target
하는 알고리즘의 4단계 결과를 비교한다. 전산 실험 환경은 반송주파수 24GHz, 대역폭 200 MHz이며, 톱니파의 PRI (Pulse Repetition Interval)는 80
로 설정했다.
그림 7은 타겟이 정지한 경우, 제안하는 알고리 즘의 4단계 결과이다. 예측한 바대로, 타겟의 이동 이 없는 경우, 첨두치가 검출이 되지 않으므로, 이 동타겟이 없다고 판단하여 탐지를 수행하지 않는다.
그림 8은 이동 타겟의 경우 제안하는 알고리즘 의 연산 결과이다. 특정 위치의 위상 차이값이 확연 히 높음을 알 수 있다. 특정 임계치 이상의 값이므 로 제안하는 알고리즘을 통해 타겟의 이동 및 거리 탐지가 수행된다.
그림 9. 24GHz FMCW RF 모듈 Fig. 9 24GHz FMCW RF Module
2. 계산량 비교
기존 알고리즘과 제안하는 알고리즘의 계산량을 비교하기 위해, FFT에 소요되는 복소 곱셈량을 비 교한다. 기존의 2D FFT 기반 방식의 경우, 일차적 으로 M개의 N point FFT 수행한다. N point FFT 에 필요한 복소곱셈량이 log
이므로 M개의 N point FFT는 log
의 곱셈량이 요구된다. 그 이후, N 샘플을 갖는 N point FFT 출력에 대해, M point FFT를 수행하므로, 이때 log
의 곱 셈량을 필요로 한다. 즉, 2D FFT를 이용한 기존 방식의 경우 log
의 곱셈량을 가짐을 알 수 있다. 한편, 제안하는 알고리즘은 총 2개의 N point FFT를 수행한다. 총 log
의 곱셈량이 요 구된다. 결론적으로, 제안하는 알고리즘의 계산량이 확연히 작음을 알 수 있다.Ⅳ. 실험 결과
모의 전산 실험 데이터를 통해 일차 검증한 알 고리즘을, 대구경북과학기술원에서 개발한 FMCW 레이더 RF 모듈 [4]을 이용하여 실험적으로 검증했 다. 사용된 24GHz RF 모듈은 그림 9와 같으며, FMCW RF 모듈로 중심주파수 24GHz, 대역폭 200MHz, 톱니파 PRI 80를 사용하였다. 송신 1 채널, 수신 3채널로 구성되며, 본 논문에서는 송신 1채널, 3개의 수신 채널 중, 1번째 채널을 사용하였 다.
성능검증을 위해 실험 데이터는 그림 10에서 보 인 대구경북과학기술원에서 개발된 보드를 통해 저 장했다. 개발된 보드는 TI (Texas Instrument)사 의 저가형 마이크로프로세서 칩인 TMS320을 사용
그림 10. DGIST 보드 Fig. 10 DGIST board
그림 11. 무반사 챔버실 Fig. 11 Anechoic Chamber
한다. 이 마이크로프로세서는 최대 150MHz로 동작 하며 ADC (Analog Digital Converter), DMA (Direct Memory Access), CAN (Controller Area Network) 등 다양한 인터페이스와 고성능 신호처 리 라이브러리를 사용 할 수 있다 [5]. 실험 데이터 의 샘플링 레이트는 5MHz를 사용했다.
그림 11은 제안된 알고리즘의 성능 검증 실험을 수행한 대구경북과학기술원의 무반사 챔버실이다.
무반사 챔버실은 길이 10m, 폭 5m, 높이 4m의 규 격으로 주파수 범위 8GHz~100GHz까지 측정이 가 능하다.
실험 시나리오는 그림 12에서 보인대로, 챔버실 의 이동 피반체를 사용하여 단일 타겟 상황에서 레 이더와 타겟간의 거리가 3.3m와 6.2m 지점의 정지 타겟과 3.3m에서 6.2m사이를 왕복으로 움직이는 이동 타겟으로 진행했다. 실험 데이터는 개발된 보 드의 ADC를 통해 저장되며 매트랩에 구현된 알고 리즘을 통해 분석했다.
그림 12. 실험 환경 구성 Fig. 12 Experiment Environment
Configuration
그림 13. 정지 및 이동 타겟에 대한 탐지 실험 결과
Fig. 13 Experimental detection results for stationary and moving targets
그림 13에서는 타겟이 3.3m와 6.2m에 정지해 있는 경우와 타겟이 이동한 경우의 3회 실험 데이 터를 제안된 알고리즘을 통해 연산한 결과이다. 앞 서 모의전산실험에서 보인대로 정지 타겟의 경우, PSD가 완벽히 0은 아니지만, 첨두치가 매우 낮음을 관찰할 수 있다. 반면에, 이동 타겟의 경우 정지 타 겟과 달리 첨두치가 확연히 높음을 관찰할 수 있다.
이를 통해 제안된 알고리즘이 실험 환경에서 타겟 의 이동 및 거리를 판별할 수 있음을 확인했다.
FFT 결과로부터 위상변화를 관찰한다. 위상변화가 존재하는 경우 탐지타겟이 존재하는 것으로 판단하 고, 이때에만 탐지타겟의 거리를 추정함으로써, 2차 원 FFT 방식 대비 낮은 복잡도를 가진다. 전산모의 실험 및 실제 레이더 모듈을 이용한 실험을 통해 획득된 정지 타겟과 이동 타겟의 데이터 비교분석 방법으로 제안하는 알고리즘이 이동 타겟을 판별 할 수 있음을 확인했다.
References
[1] E. Hyun, J.H. Lee, “Architecture of Signal Processing Unit to Improve Range and Velocity Error for Automotive FMCW Radar,”
Transactions of KSAE, Vol. 18, No. 4, pp.
54-61, 2010 (in Korean).
[2] V. Winkler, “Range Doppler Detection for automotive FMCW Radar," Proceedings of the 4th IEEE European Radar Conference, pp.
166-169, 2007.
[3] E. Hyun, Y.S Jin, B.S. Kim, J.H. Lee,
“Development of Human Detetion Algorithm for Automotive Radar,” Transactions of KSAE, Vol. 25, No. 1, pp. 92-102, 2017 (in Korean).
[4] Y.H Ju, Y.S. Jin, J.H. Lee “Design and Implementation of a 24 GHz FMCW Radar System for Automotive Applications,"
International Radar Conference, 2014.
[5] http://www.ti.com
of Science & Technology (DGIST), Korea, as researcher. His current interests include Radar signal processing and implementation of FPGA/DSP.
Email: [email protected]
Eugin Hyun (현 유 진)
He received his B.S., M.S., and Ph. D. degrees in electronic engineering from Yeungnam Univer- sity, Korea, in 1999, 2001, and 2005. Since 2005, he joined the Daegu Gyeongbuk Institute of Science and Technology (DGIST) ,Daegu, Korea, as a senior research engineer. From 2007 to 2013, he also joined in the Department of Electronic Engineering, the Undergraduate Coleges, Yeungnam University, Korea, as an adjunct professor. His primary research interests are the digital signal processing (detection, tracking, classification) of FMCW/UWB radar, implementation of FPGA/DSP, automotive radar application, the human motion indication applications, and sensor fusion.
Email: [email protected]
engineering of Hanyang Univ., Korea, in 2006. From 2013, he is a Ph.D.
Candidate in department of electronics engineering of Kyungpook National Univ., Korea. Since 2006, he is currently working in Daegu Gyeongbuk Institute of Science & Technology (DGIST), Korea, as senior researcher.
From 2015.10 to 2016.10, he worked for Univ. of Florida, as visiting scholar.
His current interests include super-resolution radar systems and design and implementation of FPGA/DSP.
Email: [email protected]
Bong-seok Kim (김 봉 석)
He received his B.S.
degree in department of electronics engineering in 2006 and the M.S.
and Ph.D. degrees in department of information and communications Engineering of Yeungnam Univ., Korea, in 2009 and 2014, respectively. From 2014 to 2016, he worked in Daegu Gyeongbuk Institute of Science &
Technology (DGIST), Korea, as a post-doc. Since 2016, he is currently working DGIST, Korea, as a senior research engineer. His current interests include multi-functional radar systems and radar signal processing.
Email: [email protected]
electrical and electronics and computerscience from SungKyunKwan Univ., Korea, in 1998 and 2002, respectively. From 2002 to 2005, he joined in Samsung Electronics Company as a Senior Research engineer. Since 2005, he has joined in Daegu Gyeongbuk Institute of Science &
Technology (DGIST), Korea, as a Principal research engineer. He played a role as a director in robotics research division in 2015. His primary research interests are the detection, tracking, recognition for radar (FMCW & UWB radar), vision-based vehicle sensor and radar signal processing.
Email: [email protected]
![그림 1. 기존의 2D FFT를 사용한 FMCW 감시레이더 알고리즘 [3]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5339243.393982/2.774.411.679.127.374/그림-기존의-d-fft를-사용한-fmcw-감시레이더-알고리즘.webp)