110
최적의 Bang-Bang 입력을 이용한 볼-빔 시스템의 강인한 추적 제어
Robust Tracking Control of a Ball and Beam System using Optimal Bang-Bang Input
이 경 태 *, 최 호 림*★
Kyung-Tae Lee*, Ho-Lim Choi*★ Abstract
In this paper, we apply the input-output linearization technique to tracking the follow-up trajectory in the ball-beam system. There exist system disturbance and various uncertainties, the conventional input-output linearization based control yields some noticeable errors in tracking performance. As a result, a new robust control technique for the uncertainty of the system was proposed and its improved performance verified through simulation and experimental results. So, more realistic system model is obtained with unmatched uncertainties and disturbance.
Then, in order to improve the control performance, a new optimal bang-bang control input is additionally added.
요 약
본 논문에서는, 볼-빔 시스템에 입-출력 궤환 선형화 기법을 적용하여 추종 궤적 를 추종하도록 제어기를 설계
하였다. 설계한 제어기로 시뮬레이션 및 실험에 적용한 결과, 실험에서 오차가 크게 발생하였다. 이러한 이유는 외 란 및 입력정합조건을 만족하지 못해 발생한 것으로 판단되어 볼-빔 시스템의 기존 모델링에서 적절한 외란을 추가 하여, 시뮬레이션을 통해 실험 결과와 비슷한 유효한 모델링임을 입증하였다. 그러나, 여전히 저하된 성능으로 인해 bang-bang 제어기를 추가로 적용하였다. 결과적으로, 시스템의 불확실성에 대해 강인하고 향상된 성능을 시뮬레이 션 및 실험결과를 통해 검증하였다.
Key words :Ball and beam system, Input-output feedback linearization, Bang-bang input, Unmatched disturbance, Uncertainty, Tracking, Robust control
* Dept. of Electrical Engineering, Dong-A University, Korea.
★Corresponding author
E-mail: [email protected], Tel:+82-51-200-7734
※ Acknowledgment
This work was supported by the National Research Foundation of Korea(NRP) grant funded by the Korea government (MSIP) (No.NRF-2016R1A2B4008465).
Manuscript received Mar. 7, 2018; revised Mar. 19, 2018 ; accepted Mar. 23, 2018
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Robust Tracking Control of a Ball and Beam System using 111 Optimal Bang-Bang Input
Ⅰ. 서론
대부분의 물리적 시스템은 불가피하게 불확실성 요소를 포함하고 있어 시스템에 제어기를 적용하 면 저하된 성능이 발생하게 된다. 이처럼, 최근에 는 불확실성 요소를 포함하고 있는 시스템의 성 능을 향상시키고자 하는 연구가 진행되고 있다.
[1],[3]-[6],[8],[10]-[12],[14]-[17]. 하지만, 대부분의 제어 방법은 입력정합조건(Input matching conditi -on)에 부합할 때, 불확실성에 대한 강인성을 보 이거나, 많은 제약조건으로 인해 실제로 설계하기 도 힘들고 적용하기도 매우 어렵다. 또한, 입력정 합조건에 부합하지 못할 때는 강인성을 보장할 수 없다는 단점이 있다. 실제로 많은 비선형 제어 시스템은 입력정합조건을 부합하지 못하며, 이런 시스템에 대한 제어 방법 역시 활발히 연구되고 있다[6]. 볼-빔 시스템(Ball and beam system) 역 시 불확실성을 포함하고 있기 때문에 예외가 아 니지만, [9],[10]을 바탕으로 불확실성을 포함하고 있더라도 조정제어를 통해 시뮬레이션과 실험결 과간에 큰 차이가 없는 것을 확인할 수 있다. 따 라서, 이번 연구는 볼-빔 시스템의 추종 제어를 다루기로 한다. 먼저, 볼-빔 시스템에 입-출력 궤 환 선형화 기법을 적용하여 시뮬레이션 및 실험 을 비교한 결과 [9],[10]과는 달리 큰 차이가 발생 하였다. 이러한 이유는 알 수 없는 외란과 입력정 합조건에 부합하지 못해 영향을 미친것으로 판단 되어 시뮬레이션에서도 실험 환경과 유사한 조건 을 갖추기 위해 볼-빔 시스템의 상태방정식에 비 선형 성분 즉, 외란을 적절히 추가하여 제어기를 설계하였다. 결과적으로 외란을 추가함으로써 입 력정합조건을 만족하지 못하게 되었으며, 재모델 링한 제어기로 시뮬레이션과 실험 결과간에 큰 차이가 없어 유효한 모델링인 것을 입증하였다.
하지만, 여전히 제어기의 저하된 성능은 피할 수 없었다. 한편, [12]에서는 피드백이 중단되었을 때, 일정 시간 동안 특정 경계내에 유한한 스위칭을 통해 시스템의 응답을 유지하는 bang-bang 제어 기법이 보고 되어있다. 이러한 점을 근거로 하여 본 논문에서는 앞서 언급한 [9],[10]을 통해 볼-빔 시스템에 서는 조정 제어가 효과적이지만, 추종 제어에는 부족하여 적절하게 bang-bang 제어 기 법을 적용하면 추종 오차의 경계를 감소시키는데 효과적일 것으로 판단하였다. 이에 따라, 기존의
입-출력 궤환 선형화 기반 제어기가 구동되고 있 는 상황에서 쇠공이 초기 과도상태에서 벗어나 정상상태 궤도로 진입하고 있는 단계의 상태값으 로부터, 적절한 스위칭 및 bang-bang 입력신호를 특정 시간동안 보충하였다. 그 결과, 시뮬레이션 및 실험 결과에서 모두 오차의 경계를 감소 시킴 으로써 저하되었던 추종의 성능을 향상시켰다. 따 라서, 파라미터의 불확실성에 대해서는 강인성을 그리고 외란 및 입력정합조건에 부합하지 못하는 불확실성에 대해서도 성능을 향상시키는 새로운 강인한 제어 기법을 제안하였고, 시뮬레이션 및 실험 결과를 통해 입증하였다.
Ⅱ. 볼-빔 시스템의 기존 모델링
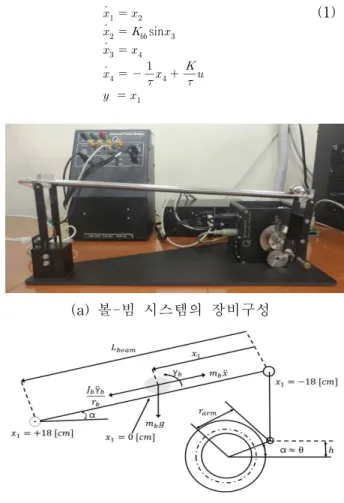
Fig. 1은 [9],[10]을 통해 볼-빔 시스템의 장비 구성과 개략도를 나타낸 것이며, 공칭모델에 의한 상태방정식은 식 (1)과 같이 정리할 수 있다.
sin
(1)
(a) 볼-빔 시스템의 장비구성
(b) 볼-빔 시스템의 개략도 [13]
Fig. 1. Ball and beam system 그림 1. 볼-빔 시스템
여기서, 은 쇠공의 위치, 는 쇠공의 속도,
는 모터의 각도, 는 모터의 각속도이며, 는 시스템의 모델 이득값, 는 정상상태 이득값, 는 시정수, 는 입력전압이다. 참고문헌 [9],[10]을 통 해 · , ·,
이고, 쇠공의 반경과 빔의 길이를 통해 쇠공의 초기위치와 모터의 초기각을 설정하였다. 따라서, 초기조건은 , ,
, 이며, 시스템의 제어 목표인 추종 궤적은 sin로 설정하였다.
Ⅲ 입-출력 궤환 선형화 기반 제어기 설계 및 실제 시스템 모델링
3.1 입-출력 궤환 선형화 기반 상태궤환 제어기 입-출력 궤환 선형화(Input-output feedback linea rization)는 비선형 시스템에 상태 궤환을 가하여 궤환 시스템이 선형의 특성을 갖도록 하는 선형 화 기법으로 , , sin,
cos라고 하면, 식 (1)을 입-출력 궤환 선 형화를 통해 다음과 같이 변환식을 설정할 수 있 다[2],[7],[9].
sin
cos
cos
(2)
식 (2)에서 와 는 다음과 같이 정리된다.
sin
cos
cos
cos
(3)
식 (3)을 이용하여 를 다음과 같이 나타낼 수 있 다.
cos
sin
cos
cos
sin
cos
(4)
식 (4)를 식 (2)에 대입하면 다음과 같이 를 구 할 수 있다.
sin
cos
cos cos
sin
cos
(5)
따라서, 식 (2)에 식 (5)를 적용하면 다음과 같이 표현할 수 있다.
(6)
시스템의 출력은 이며, 제어 목표에 따라,
이며, , ,
, 그리고, 식 (6)은 식 (7) 이 된다.
(7)
식 (7)은 행렬식을 이용하여 다음과 같이 나타낸 다.
(8)
여기서, 이고, 근사된 식 (8)을 이용 하여 극배치 기법에 기반한 제어기 설계를 위해, 식 (8)의 와 를 이용하여 행렬이 Hurwitz가 되는 제어기의 이득값을 구한다. 또한, 식 (8)에 따라 를 다음과 같이 구할 수 있다.
(9)
따라서, 식 (4)의 에 식 (9)를 적용하면 기존 모 델에 의해 최종 설계된 추종 제어기 식은 다음과 같이 정리할 수 있다.
cos
sin
cos
(10)
Robust Tracking Control of a Ball and Beam System using 113 Optimal Bang-Bang Input
3.2 입-출력 궤환 선형화 기반 상태궤환 제어기 의 시뮬레이션 및 실험결과
Fig. 2는 앞에서 설계한 제어기 식 (10)을 볼-빔 시스템의 초기조건과 추종 궤적 를 이용하여 시뮬레이션 및 실험 결과를 비교한 것 이다.
(a) 쇠공의 위치
(b) 추종 오차
Fig. 2. Simulation and experimental results of Input-ouput feedback linearization based state feedback controller
그림 2. 입-출력 궤환 선형화 기반 상태궤환 제어기의 시 뮬레이션 및 실험결과
관찰 1: Fig. 2에서 시뮬레이션 결과를 관찰하면 쇠공이 추종 궤적 를 목표하는 만큼 추종하고 있어 오차가 없는 것을 확인할 수 있다. 그러나 실험 결과를 관찰하면 쇠공이 추종 궤적을 따라 가지 못해 오차가 최대 6[cm]까지 발생한 것을 확인할 수 있다. 이러한 이유는 볼-빔 시스템이 완전한 공칭 모델이 아니며, 알 수 없는 외란 및 입력정합조건(Input matching condition)을 만족하 지 못해 오차가 발생한 것을 유추해 볼 수 있다.
여기서, 입력정합조건이란, 제어 변수들이 포함되 어있는 상태방정식에만 불확실성이 들어가야 한 다는 구조적 성질이다[7]. 이처럼 볼-빔 시스템의 내적으로 불확실성 요인과 외적으로 외란을 고려 하지 않았을때의 시뮬레이션과 실험 결과를 비교 하였을 때, 오차가 크게 발생했기 때문에 시뮬레 이션에서도 실험 환경과 비슷한 조건을 갖춘 좀 더 유효한 모델링을 설계해야 할 필요성이 있다.
3.3 볼-빔 시스템의 재모델링
앞서 언급했듯이 볼-빔 시스템에 제어기를 적용 하여 구동시키면 시스템 자체의 불확실성과 알 수 없는 외란 및 입력정합조건을 만족하지 못해 시뮬레이션과는 달리 실험에서는 오차가 발생하 여 성능이 저하된 결과를 확인하였다. 따라서, 시 뮬레이션에서도 실험 환경과 비슷한 조건을 갖추 기 위해 식 (1)을 다시 표현할 수 있다.
sin sin
(11)
여기서, 볼-빔 시스템의 내부 요인으로는 식 (1) 에서 는 파라미터의 불확실성을 포함하여,
와 로 각각 공칭 및 불확실한 파라미터로 나 눌 수 있으며, 외부 요인으로는 외란을 고려하여 식 (1)의 상태방정식에 sin sin,
sin, sin, cos cos를 추가 하게 되었다. 따라서, 실험 환경과 유사하게 모델 링을 하다보니 입력정합조건을 만족하지 못하는 시스템이 되었다.
3.4 재모델링의 유효성 검증 결과
다음은 파라미터 의 불확실성과 추가한 외란
, , , 를 시뮬레이션 및 실험을 통해 볼- 빔 시스템의 강인성을 확인하고, 유효한 모델링인 것을 검증한다.
3.4.1 재모델링의 시뮬레이션 결과
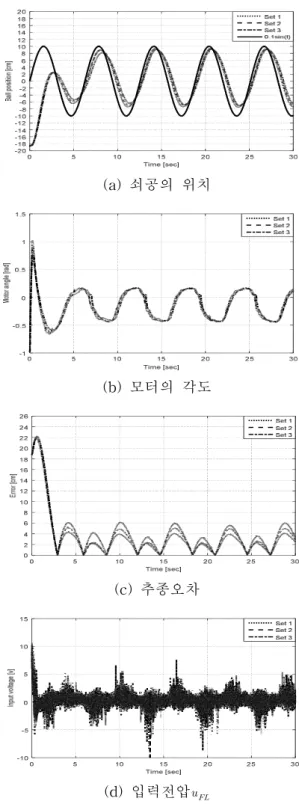
Fig. 3은 입-출력 궤환 선형화 기반 상태궤환 제 어기의 시뮬레이션 결과에서 쇠공의 위치, 모터 의 각, 추종오차, 입력전압를 나타낸 것이며, 쇠공의 속도와 모터의 각속도는 측정할 수 없 어 미분기를 사용하였다. 그리고 앞으로의 모든 시뮬레이션 및 실험결과에서는 제안한 제어기의 강인성을 확인하기 위해 별로 각각 표시하였다.
(a) 쇠공의 위치
(b) 모터의 각도
(c) 추종오차
(d) 입력전압
Fig. 3. Simulation results of re-modeling 그림 3. 재모델링의 시뮬레이션 결과 3.4.2 재모델링의 실험결과
Fig. 4는 앞의 시뮬레이션을 토대로 실험에 적용 해 본 결과이다.
(a) 쇠공의 위치
(b) 모터의 각도
(c) 추종오차
(d) 입력전압
Fig. 4. Experimental results of re-modeling 그림 4. 재모델링의 실험결과
관찰 2: 시뮬레이션 결과 fig. 3의 (c)를 관찰하면 외란으로 인해 추종 오차가 대략 6∼8[cm]로 나타 났고, 실험 결과 fig. 4의 (c)를 관찰하면 추종 오차 가 대략 4∼6[cm]인 것을 확인할 수 있으며, 입력 전압의 크기도 유사한 것을 확인할 수 있다.
따라서, 추종오차와 입력전압이 실제 시스템에 근접 하여 큰 차이가 없는 것을 바탕으로 앞에서 수정한
Robust Tracking Control of a Ball and Beam System using 115 Optimal Bang-Bang Input
모델링이 유효한 것을 입증하였다. 그러나, 입-출 력 궤환 선형화 기법을 적용한 제어기만으로는 추종 궤적 를 추종하는 성능이 측정잡음, 노이 즈, 외란등으로 인해 만족스럽지 못한 것을 확인 할 수 있다. 따라서, 제어기의 성능을 향상시키기 위해서는 입-출력 궤환 선형화 기법에 새로운 강 인한 제어기법을 추가하여 더욱더 정밀도를 높일 수 있는 제어가 필요하다.
Ⅳ 제어성능 향상을 위한 bang-bang 제어기 설계
재구성된 볼-빔 시스템의 모델링 식 (11)은 입력 정합조건을 만족하지 못하므로 기존의 슬라이딩 모드, 적응제어, 백스텝핑 등 기존의 제어 기법은 사용하기 어렵다. 따라서, 새로운 제어 기법이 필 요하다. 한편, [3],[12]에서는 일정 시간 동안 특정 경계내에 유한한 스위칭을 통해 시스템의 응답을 유지하는 bang-bang 제어 기법이 보고 되어있다.
이러한 점을 근거하여 본 논문에서는 앞서 언급 한 [9],[10]을 통해 볼-빔 시스템에서는 조정 제어 가 효과적이지만, 추종 제어에는 부족하여 적절하 게 bang-bang 제어 기법을 적용하면 추종 오차 의 경계를 감소시키는데 효과적일 것으로 판단되 어, bang-bang 제어를 통해 오차의 경계를 감소 시켜 성능을 향상시킬 수 있는 제어기를 설계한 다.
4.1 최적의 bang-bang 제어기 설계에 관한 이 론 정리
다음은 [3],[12]를 근거하여 정리된 내용으로, 제어 기의 성능 향상을 위해 입-출력 궤환 선형화 기 반 제어기의 입력신호에 새로운 입력신호
을 추가하여 보정된 입력전압 을 적 용하기 위해 식 (11)을 일반적인 비선형 시스템으 로 간단히 나타낸 것이다.
sin
sin
(12)
여기서, 이다.
Assumption 1
(i)║ ′║ ≤ ║ ′║, , ║
′║ ≤ ║ ′║, , ║ ′║ ≤
║ ′║, , ║ ′║ ≤ ║ ′║,
을 만족하는 상수 가 존재한다고 가정한
다. (ii)입력 는 compact set ≤ 에 속한다.
Theorem 1 [12]
Assumption 1을 충족하면 (i)지정된 경계 아래에 시스템 작동 오류를 유지하는 최적입력신호
이 있다. (ii) 최적입력 신호 은
bang-bang 제어기의 입력신호 ±로 근사화 할 수 있다.
Assumption 1에 대한 조건 확인 및 부가 설명 (i)재모델링한 볼-빔 시스템의 식 (12)는 [12]의 시스템 형태와 유사하며, Lipschitz조건을 만족한 다. (ii)는 볼-빔 시스템의 허용 가능한 입력 전압
이 ± 인 것을 고려하여 적절히 설정하면 하드
웨어적으로 아무런 문제가 없다. 또한, 최적의 입 력 신호는 제어 성능 측면에서 구현 가능한 bang-bang 입력 신호로 근사화 될 수 있음을 나 타내고 있다. 즉, (i),(ii)조건이 충족되고, 실제 새 로운 입력신호 을 구현하기에는 계산 과정이 복잡하다는 어려움이 있기 때문에, 계산하기 쉬운 time optimal 기법이 필요하며, 한정된 수의 스위 칭을 갖는 bang-bang 제어기는 실제로 쉽게 구 현이 가능하다는 관점에서 ±로 대체할 수 있다. 따라서, 기존의 입-출력 궤환 선형화 기 반 제어기를 구동시키면서 특정 시간의 상태값에 서 bang-bang 제어기의 를 특정 주기 로 안정한 값을 설정하여 추가로 적용하면 오차의 경계를 감소시켜 추종 성능을 향상시킬 수 있다.
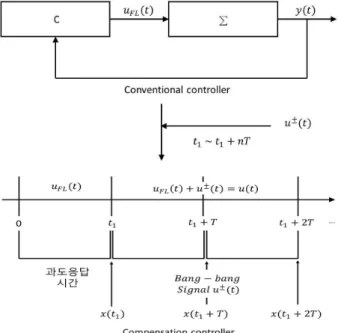
4.1.1 bang-bang 제어기의 주기 개략도
bang-bang 제어기의 설계요소로는 주기, 스위칭 수, 입력전압 3가지 요소가 있으며, Fig. 5는 기 존의 입-출력 궤환 선형화 기반 상태궤환 제어기 에서 특정 시간에 bang-bang 제어기가 추가되고
함께 구동되어 제어기의 성능을 향상시키기 위한 시스템의 개략도를 나타낸 것이다.
Fig. 5. Feedback schematic 그림 5. 피드백 개략도
가 종료되면 종료된 시점의 상태값에서 를 반복적으로 입력하여 함께 구동하게 된다. 또한, 초기 과도상태에서는 시스템이 불안정하고 변화 하는 과정이며, 정상상태에서는 반응이 일정하기 때문에, 시스템이 안정되어 반응이 일정한 정상상 태에서 bang-bang 제어기를 추가해야 한다. 따라 서, 은 제어기의 응답이 초기 과도상태 궤적에서 정상상태 궤적으로 진입하는 순간을 의미하고, Fig. 3,4를 통해 로 설정한다. 즉, 요약하면 다음과 같다.
i ∼ 까지는 입-출력 궤환 선형화를 기반
한 제어기가 구동되고, ii ∼ 까지 는 의 상태값에서 bang-bang 제어기가 추가되 어 Theorem 1에 의거하여 기존의 입-출력 궤환 선형화 기반 상태궤환 제어기와 함께 구동된다.
여기서, ≤ ≤ 이다.
4.1.2 입력전압, 주기, 스위칭 수의 설계 Table. 1과 Fig. 6 그리고 Table. 2는 bang-bang 제어기의 입력전압, 주기, 스위칭 수을 설정 하기 위해 볼-빔 시스템의 사양을 벗어나지 않는
범위 내에서 기준을 세운 것이다. 먼저, 입력전압
는 Fig. 4의 (d)를 관찰하면 최대 입력전압의 크 기가 대략적으로 이다. 에서 ≤ 를 만족해야 하며, 볼-빔 시스템은 최대 허용 가능한 입력전압이 ±이므로, 볼-빔 시스템에 무리가 가지 않도록 bang-bang 제어기의 입력전압을 최 대 를 초과하지 않도록 설정하면 하드웨어적으 로도 아무런 문제가 없다. 그리고 스위칭의 횟수 가 적으면 쇠공이 추종 궤적을 추종하면서 bang- bang 입력전압이 한 방향으로만(+ or –방향) 입 력되어 치우지게 되고, 스위칭이 많으면 기존의 입-출력 궤환 선형화 기반 제어기 보다 bang-ba ng 제어기의 영향이 더 커져 성능이 저하될 수 있기 때문에, 스위칭 횟수에 대한 영향을 관찰하 기 위해 스위칭 수은 1초를 기준으로 ∼ 회까 지 설정하였다. 마지막으로 주기는 빔을 따라 움 직이는 쇠공이 를 추종하면서 관성의 영향을 관찰하여 안정된 값을 설정하기 위해 Fig. 4의 (b)를 관찰한다. 먼저, 주기를 3,5,6초로 나누게 되 면 5초 간격일 때, 모터의 각도가 대략적으로 양 극단의 최대값( ∼ ) 근처이 며, 3,6초 일 때는 제각각 인것을 확인할 수 있다.
다시 분석하면 쇠공의 속도를 감소시키기 위해 모터의 각도가 최대가 되었을 때, 즉, 쇠공의 속 도가 0근처가 되는 지점에서 bang-bang 제어기 의 입력을 추가해야 관성의 영향을 가장 덜 받을 수 있기 때문에 Table. 3에 3,5,6초 일 때 측정된 모터의 각와 양 극단의 최대값()의 차이를 나타내었고, 3,6초 일 때 보다 5초 일 때, 양 극단 의 값에 더 가까운 것을 확인할 수 있어, 특정 주 기 로 설정한다.
Table 1. Difference of measured and 표 1. 측정된 와 의 차이
Difference of and
5 0.05 67.95
8 -0.38 12.24
11 0.08 48.71
14 -0.34 21.48
17 0.05 67.95
20 -0.29 33.03
23 0 100
26 -0.2 53.81
29 -0.12 71.29
Robust Tracking Control of a Ball and Beam System using 117 Optimal Bang-Bang Input
Difference of and
5 0.05 67.95
10 -0.19 56.12
15 -0.42 3
20 -0.29 33
25 0.15 3.85
30 0.12 23.78
Difference of and
5 0.05 67.95
11 0.08 48.71
17 0.05 67.95
23 0 100
29 -0.12 72.29
여기서, 차이 양극단의 측정된양극단의×
이다.
Fig. 6. Graph of setting of bang-bang , 그림 6. bang-bang , 의 설정 기준 그래프 Table 2. , range of bang-bang controller 표 2. bang-bang 제어기의 , 범위
≤ ±≤ ≤ ±≤ ≤ ±≤
≤ ≤ ≤ ≤ ≤ ≤
4.1.3 시뮬레이션을 통한 선정 결과
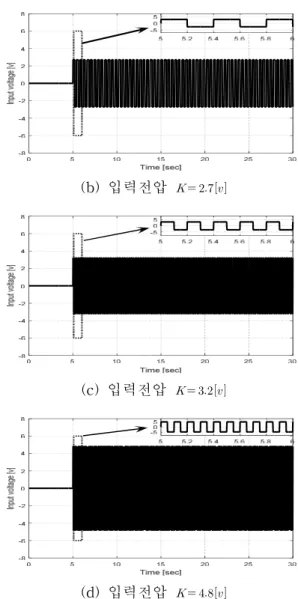
Fig 7은 Fig. 6과 Table 2를 통해 적절히 , , 을 설정하여 시뮬레이션을 한 결과이다.
(a) 추종오차
(b) 입력전압
(c) 입력전압
(d) 입력전압
Fig. 7. Simulation results of selected , , 그림 7. 선정된 , , 의 시뮬레이션 결과
관찰 3: Fig. 7은 Table 2를 통해 각각 (
회 ± ,( 회 ± ),( 회,±
)로 설정하여 추종 오차와 입력 전압을 나타
낸 것이다. 입력 전압, 스위칭 횟수 그리고 주기 는 모두 작지도 크지도 않은 중간값에서 가장 효 과가 돋보였다. 따라서, 시뮬레이션 결과를 통해
를 bang-bang 제어기의 기준으로 설정한다.
Ⅴ 보정된 전체 제어기의 성능
5.1 보정된 전체 제어기의 시뮬레이션 결과 Fig. 8은 3장의 기존의 시뮬레이션 결과에서 bang-bang 제어기를 ∼ 동안 추 가하여 쇠공의 위치, 모터의 각, 추종오차, 입 력전압를 나타낸 것이다. 앞에서와 마찬가지로
bang-bang 제어기의 성능을 확인하기 위해 극점 및 외란은 동일한 조건에서 진행하였으며, bang-bang 제어기의 입력 전압의 크기는 , 스위칭 수는 25초 동안 총 250회를 하였다.
(a) 쇠공의 위치
(b) 추종오차
(c) 추종오차 비교( )
(d) 추종오차 비교( )
(e) 추종오차 비교( ) Fig. 8. Modified full controller simulation result 그림 8. 보정된 전체 제어기의 시뮬레이션 결과
5.2 보정된 전체 제어기의 실험결과
Fig. 9는 위의 시뮬레이션을 토대로 같은 조건하 에서 실험에 적용해본 것이다.
(a) 쇠공의 위치
(b) 추종오차
Robust Tracking Control of a Ball and Beam System using 119 Optimal Bang-Bang Input
(c) 추종오차 비교( )
(d) 추종오차 비교( )
(e) 추종오차 비교( ) Fig. 9. Modified full controller experiment result 그림 9. 보정된 전체 제어기의 실험결과
관찰 4: Fig. 8,9에서 확인할 수 있듯이, 볼-빔 시 스템에 bang-bang 제어기를 추가함으로써 향상 된 성능을 확인하였고, Table 3에 재모델링 및 보정된 제어기의 결과를 요약하여 나타내었다.
Table 3. Modified controller effect 표 3. 보정된 제어기의 효과
Simulation error Experiment error
∼ ∼
Simulation error Experiment error
∼ ∼
Compare results
Simulation compare Experiment compare
∼
improvement
∼
improvement
Remark 1: 볼-빔 시스템의 외란을 정확히 알 수 없기 때문에 재모델링한 제어기의 시뮬레이션 오차와 실험 오 차간의 차이가 발생하였다.
Ⅵ 결론
본 논문에서는, 볼-빔 시스템에 입-출력 궤환
선형화 기법을 적용하여 추종 궤적 를 추종 하도록 제어기를 설계하였다. 그러나, 대부분의 물리적 시스템과 마찬가지로 볼-빔 시스템 또한 외란으로 인해 불가피하게 오차가 발생하였다. 이 에 따라, 실험 환경과 유사한 조건을 갖추기 위해 볼-빔 시스템의 상태방정식에 시변외란을 임의로 추가하다보니 자연스럽게 입력정합조건을 만족하 지 못하는 시스템이 되었다. 또한, 제안한 제어기 의 강인성을 입증하기 위해 볼-빔 시스템에서 불 확실성을 포함하는 파라미터 에 대해서도 함께 고려하였다. 이렇게 외란, 입력정합조건, 파라미터 의 불확실성을 고려한 시스템 제어기의 시뮬레이 션을 통해 유효한 모델링인것을 입증하였다. 하지 만, 볼-빔 시스템의 내·외부 요인으로 인해 성능 이 저하된 결과를 얻게되었다. 이에 따라, 초기 과도상태에서 정상상태 궤도로 진입하는 단계의 상태값으로부터 bang-bang 제어기를 추가하였고, bang-bang 제어기의 효과로 인해 시뮬레이션 및 실험 결과에서 추종 오차를 감소시키는 보다 향 상된 성능을 확인하였다. 따라서, 외란 및 입력정 합조건에 부합하지 못하면서 파라미터의 불확실 성에 대해서도 강인하고 성능을 향상시키는 새로 운 제어 기법을 제안하였다.
References
[1] S. Aditi and P. Bhanu, “Robust backstepping control of ball and beam system with external disturbance estimator,” International Conference on Power Electronics, Intelligent Control and Energy Systems, 2016, pp. 1-5.
[2] C. T. Chen, Linear System Theory and Design, 3rd Ed., Oxford University Press Inc., 1999.
[3] H.-L. Choi and J. Hammer, “Optimal robust control of nonlinear time-delay systems:
Maintaining low operating errors during feedback outages,” International Journal of Control, vol.
91, no. 2, pp. 297-319, 2018.
[4] J. Huang and C. F. Lin, “Robust nonlinear control of the ball and beam system,” American Control Conference, vol. 1, pp. 306-310, 1995.
[5] R. M. Hirschorn, “Incremental sliding mode control of the ball and beam,” IEEE Transactions on Automatic Control, vol. 47, no.
10, pp. 1696-1700, 2002.DOI:
10.1109/TAC.2002.803538
[6] B. K. Jeon, P. H. Chang, and J. Y. Park,
“Robust control for the system with unmatched uncertainty,” Journal of Control, Automation and Systems Engineering, vol. 7, no. 2 pp. 95-101, 2001.
[7] H. K. Khalil, Nonlinear Systems, 3rd Ed., Prentice Hall Inc., 2002.
[8] M. C. Lai, C. C. Chien, C. Y. Cheng, Z. Xu, and Y. Zhang, “Nonlinear tracking control via approximate back-stepping,” American Control Conference, vol. 2, pp. 1339-1343, 1994.
[9] K.-T. Lee, M.-G. Jeong and H.-L. Choi,
“Control of a ball and beam system using switching control method,” Trans. Korean Institute of Electrical Engineers, vol. 66, no. 1, pp. 72-81, 2017.
[10] K.-T. Lee and H.-L. Choi, “Switching Control of Ball and Beam System using Partial State Feedback: Jacobian and Two-Step Linearization Methods,” Trans. Korean Institute of Electrical Engineers, vol. 66, no. 5, pp.
819-832, 2017.
[11] L. Márton and B. Lantos, “Stable adaptive ball and beam control,” Mechatronics, 2006 IEEE International Conference, 2006, pp. 507-512.
[12] S.-Y. Oh and H.-L. Choi, “Robust optimal control of nonlinear systems with system disturbance during feedback disruption,” Asian Journal of Control, vol. 20, no. 6, pp.1-14, 2018.DOI:10.1002/asjc.1695.
[13] Quanser, Ball and Beam User Manuals, 2008.
[14] M. Ramırez-Neria, H. Sira-Ramırez, R.
Garrido-Moctezuma, and A. Luviano-Juarez,
“Linear robust generalized proportional integral control of a ball and beam system for trajectory tracking tasks,” American Control Conference, pp. 4719-4724, 2016.
[15] S. Willard. General Topology. Addison-Wesley, Reading. MA,2004.
[16] T. Turker, H. Gorgun, E. Zergeroglu, and G.
Cansever, “Exact model knowledge and direct adaptive controllers on ball and beam,”
Mechatronics, ICM2007 4th IEEE International Conference, pp. 1-6, 2007.
[17] W. N. White, J. Patenaude, M. Foss, and D.
Garıa, “Direct lyapunov approach for tracking control of underactuated mechanical systems,”
American Control Conference, pp. 1341-1346, 2009.
BIOGRAPHY
Kyung-TaeLee(Member)
2016: BS degree in Electrical Engineering, Dong-A University.
2018: MS degree in Electrical Engineering, Dong-A
University.
2018∼ the present: Dong-A University (Ph.D’s course).
Ho-Lim Choi (Member)
1996 : BS degree in Electrical Engineering, Iowa University.
1999 : MS degree in Electrical Engineering, KAIST University.
2004 : PhD degree in Electrical Engineering, KAIST University.
2004∼2006 : Research Professor, KAIST Information & Electronics Research 2006∼2007 : Senior Researcher, Robot Research Group, KIST
2007∼the present : Professor, Department of Electrical Engineering, Dong-A University
<A field of interest>
Feedback Linearization Techniques for Nonlinear Systems, Time delay system, Time optimal control etc.