Copyright
Ⓒ2014 KSAE / 132-07 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2014.22.6.049 Transactions of KSAE, Vol. 22, No. 6, pp.49-58 (2014)
카메라영상에 의한 DGPS-GIS기반 차선변경 지원시스템의 평가 및 신뢰성 검증
문 상 찬1)․이 순 걸*2)․김 민 우1)․주 다 니1)
경희대학교 대학원 기계공학과1)․경희대학교 기계공학과2)
Assessment and Reliability Validation of Lane Departure Assistance System Based on DGPS-GIS Using Camera Vision
Sangchan Moon1)․Soon-Geul Lee*2)․Minwoo Kim1)․Dani Joo1)
1)
Department of Mechanical Engineering, Graduate School, Kyung Hee University, Gyeonggi 446-701, Korea
2)
Department of Mechanical Engineering, Kyung Hee University, Gyeonggi 446-701, Korea (Received 3 January 2014 / Revised 3 April 2014 / Accepted 20 May 2014)
Abstract : This paper proposes a new assessment and reliability validation method of Lane Departure Assistance System based on DGPS-GIS by measuring lanes with camera vision. Assessment of lane departure is performed with yaw speed measurement and determination method for false alarm of ISO 17361 and performance validation is executed after generating departure warning boundary line by considering deviation error of LDAS using DGPS.
Distance between the wheel and the lane is obtained through line abstraction using Hough transformation of the lane image with camera vision. Evaluation validation is obtained by comparing this value with the distance obtained with LDAS. The experimental result shows that the error of the extracted distance of the LDAS is within 5 cm. Also it proves performance of LDAS based on DGPS-GIS and assures effectiveness of the proposed validation method for system reliability using camera vision.
Key words : Lane departure assistant system(차선변경 지원장치), False alarm(오작동 경고), Evaluation condition (평가조건), Hough transform(허프변환), DGPS(정밀측위항법시스템), GIS(지리교통정보)
Nomenclature 1) D : different distance, cm d : lane marker width, cm
: lane degree, ° L : vehicle width w : lane width
Subscripts i, i+1 : times of order
p : pixel point
*
Corresponding author, E-mail: [email protected]
w : departure distance w' : update departure distance L, R : left, right
1. 서 론
현대사회에서 빠르게 늘고 있는 자동차보급과 다
양한 운전자수의 증가는 교통사고의 원인이 되고
있다. Daimler-Benz의 조사에 따르면 교통사고는 도
로이탈, 차선변경 및 합류추돌, 후측면 추돌, 교차
로, 그리고 그 외 기타의 5가지 유형으로 분류되었
다. 또한 이런 사고유형은 운전자의 졸음과 부주의
함에 관계되어 있다.
1)문상찬․이순걸․김민우․주다니
교통사고를 미연에 방지하기 위한 기반구축으로 럼블 스트립(Rumble strip)이 필요하나, 설치 및 유지 비용이 많이 들게 된다. 따라서 운전자의 자동차 사 고 예방을 위한 ADAS(Advanced Driver Assistance System) 에 대한 개발은 안전성 확보와 지능화를 위 한 자동차의 한 축이 되고 있다. 그 중에서 차선이탈 경고장치(Lane Departure Warning System, LDWS)
2)는 횡방향의 차선이탈을 예방하는 중요한 안전기술 이다. 특히, C. Visvilis는 미국에서 LDWS로 인한 10%의 충돌사고 효과가 있으며, 독일에서는 5 ~ 12% 감소효과에 대해 조사하였다.
3)LDWS는 카메 라에 감지된 차선 표시(lane marker)를 통해 차선과 자차량의 기준거리차를 측정, 이탈여부를 판단하게 되며 이를 운전자에게 시각, 청각, 촉각 등을 이용하 여 전달하는 원리이다. 차선이탈 경고장치의 성능 평가는 센서, 전자제어장치(ECU) 등의 단품 성능평 가 보다는 실차 상태에서의 시스템 성능을 평가하 는 시험방법이 주로 사용되고 있으며, 경고장치의 외부 조건인 도로 및 환경 조건을 정의하고 작동시 험 방법에 대한 표준화가 진행되고 있다.
4)현재 LDWS는 카메라영상기반으로 차선 표식이 있는 환경에서 기준속도 60 km/h 이상의 조건하에 다양한 기준방법에 따라 이탈여부를 감지하고 있 다. Chen
5)등은 차선이탈 경고장치의 구성을 카메 라와 모바일기반으로 하였고, Lin
6)등은 단일카메 라 영상정보를 통한 유한상태기계(FSM) 모델을 적 용한 경고 알고리즘을 제시하였다. 또한 카메라 영 상정보에서 차선표식을 인지하지 못하는 상황에도 이탈경고가 가능하도록 Yang
7)등은 영상 이미지가 검출되지 않는 상황을 대비한 Locas-Kande 광학흐 름방식을 결합하여 정확성을 보였다. 그러나 다양 한 도로와 날씨환경에서 차량의 안전성을 높이기 위한 운전자의 요구는 고정밀 이미지처리가 가능한 시스템으로 확대되고 있다.
이 같은 요구를 바탕으로 정밀보정 측위항법인 DGPS(Differential Global Positioning System) 와 도로 지도 정보를 포함한 차선 GIS(Geographic Informa- tion System) 정보를 결합하여 차선이탈 감지의 정확 도를 높이고 왜곡된 이미지상태에 의존하지 않는 차선변경 지원장치(Lane Departure Assistant System,
LDAS) 에 대한 성과를 Moon
8)등이 제시 하였다. 또 한 유사한 개념의 GPS 사용 시스템에 대해 Park
9)등 이 결과를 제시하였다. DGPS기반의 차선변경 감지 알고리즘은 절대적인 차량의 위치정보를 알 수 있 게 된다. 뿐만 아니라, 기존 설계되어있는 GIS 도로 정보를 내비게이션 형태로 가지게 되어 시야가 확 보되지 않는 불확실한 환경 하에서도 차선 이탈여 부와 예측 주행궤적을 고려한 이탈 감지가 가능하 다. 이 같이 설계된 차선변경 감지장치를 ISO 17361:2007의 평가조건 및 방법
10)으로 실차 검증평 가를 통해 신뢰성 및 안전성을 평가하였다.
본 논문에서는 DGPS를 활용한 차선변경 지원장 치에 대해 평가 및 신뢰성 검증을 영상이미지를 기 반으로 수행하였다. 차선과 바퀴의 경계점들은 허 프변환 방법을 통하여 강인한 결과를 얻을 수 있었 다. 획득한 차선과 바퀴사이의 거리정보는 차선변 경 지원장치의 측정결과와 비교 검증하여 신뢰성을 평가하였다. 검증평가방법은 ISO 17361:2007의 방 법에 따라 오작동 직선주행과 차선변경 주행 테스 트를 진행하였고, 반복테스트에 따른 신뢰성 있는 검증결과로 기존방법과의 유사성을 확인할 수 있었 다. 이와 더불어 GIS차선정보를 통해 직선과 곡선 도로 내 주행궤적상태도 확인 할 수 있었다.
본문의 구성은 다음과 같다. 2장에서는 검증평 가에 이용된 DGPS기반의 차선변경 감지시스템과 평가방법을 소개하고, 3장에서는 LDAS 오작동 평 가 검증결과를, 4장에서는 차선변경 감지 평가 검 증결과를 제시하였다. 그리고 5장에서는 결론을 제시한다.
2. 차선이탈 경고 및 차선변경 지원 장치
2.1 차선이탈 경고 장치 분류 및 시스템차선이탈 감지 및 차선변경 지원장치는 차선을
감지하는 센서부, 차선이탈 여부를 판단하는 판단
부, 차선이탈 여부를 알려주는 경고부로 나눌 수 있
다. 센서부는 카메라, 적외선 센서 및 자기 센서 등
을 이용하여 차량의 횡방향 상대위치를 측정하게
된다. 판단부는 감지부에서 입력받은 신호와 방향
지시등 유무 등의 정보를 판단하며, 이탈여부에 따
라 청각, 촉각, 시각의 세 가지 형태로 운전자에게
카메라영상에 의한 DGPS-GIS기반 차선변경 지원시스템의 평가 및 신뢰성 검증
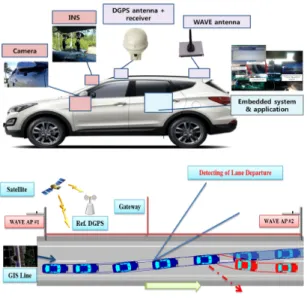
Fig. 1 LDAS system and test concept
차선이탈을 경고하게 된다. 각 제조사별 차선이탈 경고장치의 센서의 종류, 작동조건, 경고방식을 Park
11)등이 분류하여 정리하였다.
본 연구에서는 20 cm 측정오차를 지닌 DGPS센서 인 Novatel사의 SMART-V1를 감지부로 사용하였 다. 위치측위항법에서 측위정밀도를 높이기 위해 RTCM(Radio Technical Commission for Maritime) 보 정메시지가 필요하며, 이를 Fig. 1과 같이 WAVE 통 신과 연결할 수 있는 임베디드 시스템으로 구성시 켰다. DGPS의 측위 좌표는 WGS84 타원체기준 평 면직각좌표계로 변환
8)하여 global X, Y축 기준의 좌 표를 생성하였다. 실차주행은 중부고속도로 하행선 의 WAVE 네트워크 환경이 구축된 시험도로 1 km 구간에서 진행하였다.
8,12)자동차의 횡방향 이동속 도 측정을 위해 IMU센서의 요각과 가속도정보를 입력받도록 하였다. 판단부에서는 입력받은 위치정 보와 구축되어 있는 GIS차선데이터 정보를 이탈판 단 알고리즘으로 비교분석하였다. 경고부에서는 이 탈감지 시 이탈표시와 경고음을 운전자에게 제공하 였다.
좌우바퀴의 차선과의 간격은 Fig. 1과 같이 사이 드미러에 설치된 카메라의 영상이미지로부터 획득 하였다. 이와 같은 카메라 설치위치는 차선 검출의 효율성을 높여주며, 차선간격과 이탈판정 알고리즘 의 정확한 비교검증이 가능하도록 하였다.
2.2 검증 시험 평가조건
LDAS의 시험평가를 위해서 ISO 17361:2007의 기 준경계선을 Fig. 2와 같이 설정하였다. 차량은 이탈 경계선내 75 cm 안쪽 구간에서는 정상주행으로, 경 계선 바깥쪽으로부터 30 cm 이후로는 경고가 해지 되어야 한다고 규정되어있다. 6, 7번 항목은 DGPS 의 측정에러를 고려한 최대, 최소 한계구역으로 판 단 알고리즘에 적용시켰다.
Fig. 2에서 차선이탈을 감지하기 위해 차량의 경 계선과의 교차 순간을 각 시점에 따라 a ~ d 로 나타 냈다. 차량이 최소한계구역을 지나는 a 시점에서 이 탈경고가 시작되며, b 는 실제 차선을 넘는 시점을 나타낸다. 이탈경고는 최대 한계구역 c 시점을 지나 는 순간 끝나고, d 시점에는 차선번경으로 판단하게 된다. 본 연구에서는 최대, 최소 한계구역을 고려하 여 2와 4번, 3과 5번 경계선은 일치시켰다.
Fig. 2 Lane warning thresholds and standard 1: 차선경계
2: 경고 구역이 아닌 구역 3: 경고 한계점 위치 구역 4: 초기 경고 차선
5: 경고 시작 구역 오차영역
6: 측정에러를 고려한 이탈경고 최소 한계구역 7: 측정에러를 고려한 이탈경고 최대 한계구역
2.3 차선 이탈 및 변경 감지 기준
차선 이탈 및 변경 감지기준을 위해 Fig. 2의 차
량중심점(X
v, Y
v)으로부터 차선과 이탈경계선 등의
관계식을 차선 폭 w, 차량 폭 L 으로 계산하였다.
Sangchan Moon․Soon-Geul Lee․Minwoo Kim․Dani Joo
(a) Hough space (b) Votes (c) Line segments
Fig. 3 Hough transform for line segmentsW
1는 D - L/2 으로 표현되어 이탈경계선과 실제차 선표식의 간격을 나타내며, W
3은 w/2 - D/2 로 차 량의 측면과 실제차선표식의 거리, 그리고 이탈거 리 판단에 가장 중요한 W
5는 차량 측면과 이탈경 계선과의 거리로서 w - L/2 로 주어진다. 여기서 차 량중심과 차량의 측면의 폭은 W
4, 차선폭의 중간거 리는 W
2로 나타낼 수 있다. 따라서 차량의 폭과 차 선의 폭 정보에 따라 차선이탈 감지 간격거리가 결 정되게 된다.
위와 같은 평가범위를 차량의 제원에 따라 차량 과 차선표식과의 상대거리를 식 (1) ~ (2)를 통해 구 할 수 있다.
8)
×
(1)
×
(2)
식 (1)에서 X
L, Y
L는 좌측 차선내 대응좌표, 식 (2) 의 X
R, Y
R는 우측 차선내 대응좌표이며, 차량 진행 방향인 Y
v축의 Y
L과 Y
R는 좌우차선을 기준으로 차 량위치 Y
v좌표와 같다. GIS의 차선은 차량의 위치 를 기준으로 지나간 지점인 i 번째 X
Ri, X
Li와 차량 진 행방향에 위치한 i+1 번째의 GIS 차선좌표 X
Ri+1, X
Li+1를 직선 경계선으로 둔다. 이를 기준으로 차량 과 차선간의 거리는 식 (3) ~ (5)를 통해 계산되며, 상 대거리 간격으로 이탈여부를 판단하게 된다. D
Li와 D
Ri는 차량의 좌우차선에 대한 거리이며, D
w는 이 탈거리이다.
(3)
(4)
,
≈ (5)
본 평가 및 검증에서는 차선경계선으로부터 이 탈 시작거리 D 를 1.25 m, 차선폭 w 는 3.6 m, 차량 폭 L 은 1.92 m 로 하였다. 따라서 위의 최소경계거리의 기준에 따라 최초이탈경계선까지의 이탈거리
로 0.29 m 가 된다. 이는 측정에 사용된 DGPS 측위 오차 가 평균 25 cm 이므로, 측정에러를 고려한 최소한계구 역의 거리가 25 cm ± 5 cm 내에 있음을 충족하였다.
3. 영상이미지의 차선변경 평가 방안
3.1 영상이미지의 차선추출 알고리즘영상이미지로부터 차량바퀴와 차선간의 간격을
차선변경 감지장치 결과와 비교하기 위해 이미지경
계점들을 추출하였다. Fig. 3과 같이 허프변환(Hough
Transformation)
13)을 적용을 위한 영상이미지는 획
득한 픽셀크기 영역과 같은 720 × 960 으로 설정하
였다. 경계점 추출방법은 일반적으로 식 (6)에 의해
구해진 모든 직선의 X, Y절편과 사이각을 통한 직
선빈도수로 직선을 도출하게 된다. Fig. 3(a)에서 식
(6)은 일반적인 극좌표계의 직선의 방정식으로 원
점에서 직선까지의 수직거리는 , Y축과 이루는 각
도는 이다.
Assessment and Reliability Validation of Lane Departure Assistance System Based on DGPS-GIS Using Camera Vision
Table 1 Extract algorithm of boundary points
<Algorithm 1: Hough Transform>
For num=1:N (N: picture number)
- Hough transform the edge image (zero-cross) - Detecting peaks in the H
- Threshold at which values of H (Thr: 0.5) If (x2 - x1 ≥ min-len) (rotate the end-point location) - Merges the lines into a single line segment Else
- Line segments are discarded less than min-len End if
End for
, ∈ (6) 본 연구에서 특정 차선과 바퀴경계점을 구별하기 위해 식 (7)과 같이 각각의 경계점 x
i, y
i와 시작점을 통하여 0 ~ 180 ° 범위에서 직선까지 이루는 각도 에 따른 추정거리 값을 허프변환으로부터 추출된 피크점 기준으로 직선을 수집하고 분포가 많은 대 표값을 획득하게 된다.
cos
sin , ∀ ∈ (7) 이때, 차선이 검출되지 않는 상황에서도 연속적 인 이미지를 통해 차선과 바퀴의 경계점간 거리를 구하도록 Fig. 3(c)에서와 같이 행렬집합을 직선으 로 나타냈다. 누적 맵에 대한 허프변환의 최고 피크 값들은 Fig. 3(b)과 같이 얻어질 수 있다.
Table 1은 위에서 설명된 허프변환이 적용된 알고 리즘으로 영상이미지에서 추출된 경계점을 구하게 된다. N 은 영상이미지의 개수를 나타내며, 경계점 추출 기법은 zero-cross를 사용하였다. 이때, 허프변 환계수의 피크점과 시작점 H 를 0.5 배하여 최소길이 를 제거시키며 차선영역의 직선을 찾도록 하였다.
3.2 영상이미지에 의한 차선 이격 거리
추출 알고리즘
영상카메라의 설치조건에 의해 획득한 영상 이미 지는 움직이는 차량과 바퀴의 영상 위치의 변화는 거의 없다. 반면에 이동에 따른 주변 환경이 변화하 게 된다. 위와 같은 특징을 이용하여 경계선 및 거리 추출기법을 Table 2와 같이 적용하였다. 이때, 바퀴 의 픽셀위치와 차선의 초기 기준각도를 설정하면 처리시간을 줄일 수 있다.
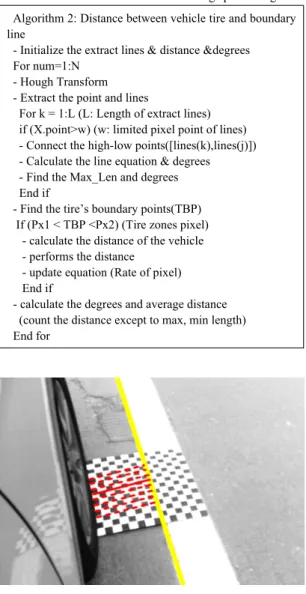
Table 2 Validation distance based on image processing Algorithm 2: Distance between vehicle tire and boundary line
- Initialize the extract lines & distance °rees For num=1:N
- Hough Transform - Extract the point and lines
For k = 1:L (L: Length of extract lines) if (X.point>w) (w: limited pixel point of lines) - Connect the high-low points([lines(k),lines(j)]) - Calculate the line equation & degrees - Find the Max_Len and degrees End if
- Find the tire’s boundary points(TBP) If (Px1 < TBP <Px2) (Tire zones pixel) - calculate the distance of the vehicle - performs the distance
- update equation (Rate of pixel) End if
- calculate the degrees and average distance (count the distance except to max, min length) End for
Fig. 4 Extract for the line segments based on vision-sensor
제시된 알고리즘은 픽셀범위의 조건에 따라 차선 과 바퀴영역에 해당하는 부분만 추출하도록 하였 다. 먼저 이미지의 정보를 초기화한 후, 차선을 추적 하는 부분과 바퀴의 끝점을 추적하는 부분으로 나 눈다. 차선의 경우 바퀴영역의 픽셀범위인 w 보다 큰 부분에서 두 개의 경계점을 이어 나가 차선을 추 출해 나간다. 추출된 차선으로부터 길이와 기울기 를 구하게 되며 기울기 변화율은 이전값과 비교하 여 판단하게 된다. Fig. 4와 같이 영상이미지를 획득 하는 카메라 위치 특성으로 차선은 기울기가 8 ~ 40°
내에 있게 된다. 연속적인 차선검출을 위해 이전 이
문상찬․이순걸․김민우․주다니
Table 3 The relative ratio of the pixel and the real gap Pixel area
(Up)
Pixel area (Down)
Real data
(cm) Ratio
258 292 20 0.107483
292 368 20 0.108911
368 404 20 0.108953
404 462 20 0.090596
462 504 20 0.090577
504 567 20 0.092054
567 709 28.28 0.073384
미지에서 검출된 차선기울기와 비교하여 ±0.5°의 조건값을 적용시켰다. 추출된 차선경계선은 가로, 세로 픽셀 경계점을 이용하여 직선방정식으로 나타 낼 수 있다.
바퀴영역의 경계점은 바퀴영역(TBP)을 280 <
TBP < 315로 두어 바퀴의 경계점들을 추출해 낸다.
추출된 바퀴영역의 경계점들은 위에서 검출한 차선 에 대한 직선방정식 연산을 통해 바퀴와 차선간의 거리를 구하게 된다.
영상이미지의 픽셀과 실제거리 비율을 측정하기 위해 Fig. 4와 같이 격자무늬판을 통한 기준비율을 계산하였다. 위에서 추출한 차선 경계선은 직선, 바 퀴와 차선간 거리는 점선으로 Fig. 4에서 볼 수 있다.
격자무늬의 기준으로부터 실제 거리당 비율값을 세 로 프레임에 따라 Table 3과 같이 정리하였다.
Fig. 4에서 측정한 정지상태에서의 상대 픽셀거리 는 308.26, 차선의 기울기는 21.04°이다. 이를 Table 3 에서 설정 비율로 계산하면 35.98 cm 가 되는데, 실 제 바퀴와 차선과의 간격이 35 cm (격자 1개당 거리 2.5 cm) 이므로 97.28 ± 95 %의 정확도임을 알 수 있다.
Table 3의 픽셀거리 대 실제거리의 비율의 차이는 픽셀범위분포마다 일정하며 250 ~ 404 에서는 0.108 배, 404 ~ 567 까지는 0.0905 배로 측정되었다. 특히 마지막 부분인 567 ~ 709 픽셀에서는 바퀴의 경계점 이 실제 바퀴 높이의 중간지점이므로 삼각함수를 통해 계산해 내어 비율이 급격히 감소하여 0.073 배 로 나타났다. 측정된 비율비는 영상이미지에서 측 정된 거리와 실제거리의 오차를 줄여 검증평가의 신뢰성을 높여 준다.
4. 시험평가 및 검증
4.1 오작동 경고 주행 시험 평가 및 검증
4.1.1 오작동 경고 주행 시험 평가
제시된 LDAS의 이탈시험 검증평가를 위해 반복 실험을 통한 오작동 비율을 확인 하였다. 이는 직선 왕복 주행을 통해 경고가 울리지 않는 것을 목표로 한다. 검증 테스트에 이용된 고속도로의 여건을 고 려하여 최고속도 100 km/h, 평균속도를 80 km/h로 구간을 주행하였다. 도로의 폭은 3.6 m로 직선구간 1 km의 두개 차로를 각각 10회씩, 총 20회 반복주행 하였다. 그 결과 Fig. 5와 같이 T1 ~ T10의 주행횟수 별 x축 기준으로 차선거리차의 가감은 있었으나, 이 탈경고에 따른 오작동 경고가 나타나지 않았다. Fig. 5 에서 일점쇄선은 초기 차선이탈 경계선이며, y축은 100 km/h 구간에서의 평균차선 간격으로 차량과 차 선간의 거리차를 나타낸다. 각 주행 시험 횟수별로 29 ~ 139 cm 의 안전주행 구역을 벗어나지 않았으 며, 점선은 1차로주행, 실선은 2차로 주행의 평균값 이다. 시행차수에 따른 오차는 운전자 조작능력과 통신의 시야각, 위성수신상태등 내외적 영향에 기 인한다.
Fig. 5 Results of false alarm test
위와 같은 결과를 확인하기 위해 측정된 주행경 로에 따른 차선간격의 결과를 영상이미지를 통한 평가로 오작동 경고 감지 평가 결과의 검증을 다음 과 같이 수행하였다.
4.1.2 오작동 경고 주행 평가 검증
오작동 경고 주행평가 검증을 위해 15 fps 의 영상
이미지를 획득한 후 검증평가를 수행하였다. 차선
변경 감지장치의 오작동 경고에 대한 거리차이에
카메라영상에 의한 DGPS-GIS기반 차선변경 지원시스템의 평가 및 신뢰성 검증
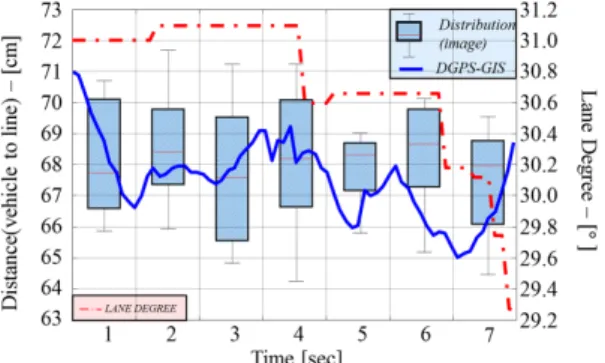
Fig. 7 Results of image processing when the straight driving Fig. 6 Distance feature of right section
대한 검증 결과를 비교하여 Fig. 6에 나타냈다. y축 은 차량과 차선간의 거리차로 DGPS로 측정된 값은 실선이며, 영상이미지에 의한 거리값은 1초간 평균 분포도로서 사각박스로 나타냈다. 일점쇄선은 영상 이미지에서 추출된 차선의 기울기로 Fig. 3(a)에서 의 와 같다.
영상이미지의 프레임에 대한 정확한 시간이 카메 라영상의 성능에 따라 불규칙하므로 전체적인 경과 시간에 대한 차선거리차를 비교하였다. 차선거리는 시간당 오차 값이 0 ~ 5 cm 로 설정한 오차 범위 안에 있었다. 또한 차선의 기울기는 29.2 ~ 31 ° 로 측정되 었으며, 이는 운전자 조작 오차를 감안할 때 직선주 행의 유형으로 판단할 수 있는 범위였다. Fig. 6에서 기울기가 같은 지점의 차선 거리차가 0 ~ 6.5 cm 으 로 나타났는데, 신뢰성 검증을 위한 차선추출 조건 알고리즘의 기준값으로 활용하였다.
영상이미지에서 차선표식의 기준선은 안쪽 선이 었으나 차선경계점을 추출하는 과정에서 바깥선을 차선으로 감지하는 경우도 나타난다. 이 경우, 차선 의 폭에 대한 실제거리와 픽셀 거리 오차를 보정해 야한다. 따라서 Fig. 6과 같이 영상 프레임 당 차선간 격차이가 10 cm 내에 있음을 확인하였고, 이를 조건
범위로 활용하였다. 시험평가의 검증을 위해 차선 간격 D
i가 10 cm 를 넘는 경우 차선폭 오차로 판단 하도록 알고리즘에 적용시켰다. 차선 표식의 폭에 대한 실측거리는 15 cm 이므로 식 (9), (10)과 같이 거 리에 대한 보정수치를 계산하여 거리 값을 감해준다.
× sin (9)
′
, if
(10) 여기서 는 차선의 기울기, D
w'는 바퀴와 차선경 계선까지 거리를 나타낸다. D
i는 i번째 영상이미지 프레임의 바퀴경계점과 차선과의 상대거리, d
i는 i 번째 영상이미지 프레임에서 차선표식의 폭 간격이 다. 오작동 경고 평가 결과, 차선과 바퀴영상에 대한 5초간 대표이미지를 Fig. 7에서 볼 수 있다. Fig. 7은 가시성을 위해 명암대비를 조정하여 나타냈다. 직 선 주행의 경우 차선 위치는 차량바퀴를 기준으로 식 (11) 의 특성을 나타낸다. 식 (11)에서 차선의 픽 셀구역 P
L은 P
Y를 기준으로 500 ~ 900 픽셀범위에 있으며, 실제 차선거리도 65 ~ 71 cm 차이를 유지하 고 있다.
⋅
(11)
4.2 차선변경 감지평가 및 검증
4.2.1 차선변경 감지평가
차선변경 감지장치의 차선이탈 상태 감지 평가를
위해 직진도로의 100 km/h 속도를 기점으로 좌, 우
측 차선을 2회씩 변경하는 테스트를 수행하였다. 차
선변경 검증평가 테스트를 위한 여유 도로폭이 좁
은 것을 고려하여 ISO 17361의 종방향 속도를 기준
으로 하였다. 따라서 실차 테스트에서는 종방향 속
도가 100 km/h 에 도달할 때 변경시도를 2회 연속으
Sangchan Moon․Soon-Geul Lee․Minwoo Kim․Dani Joo
Fig. 10 Result of lane departure by image processing Fig. 8 Result of lane departure by LDAS
로 실시하였다. Fig. 8은 좌우측 차선이탈에 따른 이 탈경계선 기준의 결과를 보여주고 있다. 각각 이탈 경계선을 기준으로 두차례 벗어나는 것을 볼 수 있다.
4.2.2 차선변경 감지평가 검증
ISO 17361에서는 테스트 절차에 따라 ① 경고발 생 이탈지점, ② 이탈속도, ③ 자동차속도를 기록하 도록 되어있다. 본 차선변경 감지평가의 검증을 위
Fig. 9 Compare change the distance (DGPS,Image)
해서 경고발생 이탈지점에 대한 영상이미지에서 나 타난 거리차를 측정 후 비교하였다.
Fig. 9는 영상이미지와 측정된 결과의 차선과의
거리차 비교 결과로 이탈경계선 29 cm 를 기준으로
시간에 따라 이탈시점에서 교차하고 있다. 파선은
영상처리에 따른 거리, 점선은 DGPS에 의한 기록된
거리이다. 영상의 프레임에 대한 시간 오차로 두 정
보의 시점이 정확히 일치하지 않으나 최대 1.71 cm,
최소 0.05 cm 차이를 보임으로 계산오차가 적었음
을 알 수 있었다. Fig. 10은 영상에 의해 획득한 차량
바퀴와 차선경계선의 이미지이다. 차선변경 주행에
따라 횡방향으로 차량의 위치와 차선의 간격이 줄
어드는 것을 볼 수 있다. 또한 차선의 기울기도 횡방
향으로 이동함에 따라 차선검출 시점에서부터 이탈
영역까지의 기울기가 33 ~ 8 ° 로 변화하는데 이는
속도에 따라 선형적으로 비례하는 특징을 보인다.
Assessment and Reliability Validation of Lane Departure Assistance System Based on DGPS-GIS Using Camera Vision
기울기 변화와 횡방향속도 파라미터로 차선 이탈 여부를 예측하고 차량의 이동상태 추적에 이용할 수 있음을 확인하였다.
5. 결 론
본 연구에서는 제안된 DGPS기반의 GIS를 활용 한 차선변경 감지지원장치의 성능 검증, 평가방법, 평가결과를 제시하였다.
1) 차선변경 감지지원장치에 이용된 시스템은 GIS 차선정보가 있는 구역과 WAVE가 구축된 도로 환경내에 DGPS의 위치정보를 갱신하는 새로운 기법을 제시하여 성능을 검증하였다.
2) 테스트 수행조건에 따른 오보 작동율, 차선변경 감지 시도에 따른 경고알림 상태는 기존장치들 과 비슷한 결과를 보였다.
3) 차선변경 감지지원장치의 신뢰성을 확보하기 위한 평가방법을 제안하여 영상이미지의 유연 한 검출 알고리즘과 차선과 차량 바퀴의 거리간 격 보정을 수행하였다. 테스트 규정은 ISO 17361 의 차선이탈경고 시스템의 규정과 조건을 따랐 으며, 검증을 위한 알고리즘을 개선으로 기존 랩 탑이나 컴퓨터로도 쉽게 검증할 수 있음을 확인 하였다.
4) 실차평가의 검증결과는 거리오차가 5 cm 미만으 로 나타났으며, 이는 측위오차 25 cm 보다 작아 높은 정확성을 보였다. 추출된 차선의 기울기와 거리차의 선형적인 변화는 차량의 횡방향 및 종 방향 이동궤적에 대한 역추적 자료로 활용 가능 함을 알 수 있었다.
5) 본 제안 방법을 활용한다면 비용적인 부분에서 도 HiLS 나 CarSim 등 고가의 동역학 시뮬레이션 및 장비를 사용하지 않고 이탈판단 알고리즘의 상대비교를 위한 영상측위만으로도 검증평가가 가능함을 확인할 수 있었다.
그러나 차선이탈 경고 장치의 오차를 줄이기 위 해서는 측위에 대한 알고리즘 개선과 GIS 차선정보 의 갱신방법에 대한 안정화, 그리고 시스템 효율성 을 높일 수 있도록 상용기술에 대한 연계가 필요하 다. 또한 영상이미지의 고도화와 차선이 전혀 없는 환경에서의 연구개발도 추가로 필요할 것으로 보인다.
후 기
본 연구는 지식경제부 기술혁신사업의 연구비지 원(과제번호. 10040990)에 의해 수행되었습니다.
References
1) X. J. An, M. Wu and H. He, “A Novel Approach to Provide Lane Departure Warning Using Only One Forward-looking Camera,” Proc. Interna- tional Symp. Collaborative Technologies and Systems, pp.356-362, 2006.
2) S. Y. Kim and S. Y. Oh, “Current Technology for the Lane Departure Warning and Prevention Systems,” Transactions of KSAE, Vol.23, No.6, pp.21-25, 2001.
3) C. Visvilis, T. L. Smith and M. Pitcher, A Lite- rature Survey of Lane Departure Warning Sys- tem, Transport Research, Project Report PPR, p.374, 2008.
4) S. J. Choi, “Test Procedures of Lane Departure Warning System for Passenger Car - Road and Ambient Conditions and Test Procedures,”
Auto Journal, KSAE, Vol.32, No.6, pp.27-33, 2010.
5) C. J. Chen, B. F. Wu, W. H. Lin, C. C. Kao and Y. H. Chen, “Mobile Lane Departure Warning System,” ISCE Consumer Electronics, pp.90-93, 2009.
6) H. Y. Lin, L. Q. Chen, Y. H. Lin and M. S. Yu,
“Lane Departure and Front Collision Warning Using a Single Camera,” International Sysmpo- sium on Intelligent Signal Processing and Com- munications System, pp.64-69, 2012.
7) J. Yang, Development of an Innovative Prototype Lane Departure Warning System, CTS Project#
2012063, Intelligent Transportation Systems Institute Center for Transportation Studies Uni- versity of Minnesota, 2013.
8) S. C. Moon, S. G. Lee, J. J. Kim and B. S. Kim,
“Detecting Lane Departure Based on GIS Using DGPS,” Transactions of KSAE, Vol.20, No.4, pp.16-24, 2012.
9) S. C. Park, S. B. Cheon, J. W. Kim and M. B.
Huh, “Development of Monitoring Program
문상찬․이순걸․김민우․주다니
Based an Automotive GPS/DR Integrated Navigation System for Lane Departure Warn- ing,” The Journal of Korea Navigation Institute, Vol.14, No.6, pp.791-799, 2012.
10) International Standard, Intelligent Transport Systems Lane Departure Warning Systems Per- formance Requirements and Test Procedures, ISO 17361:2007, 2007.
11) H. S. Park, H. G. Lee, G. J. Jang and S. M.
Yoo, “LDWS Performance Study Based on the
Vehicle Type,” Transactions of KSAE, Vol.20, No.6, pp.39-45, 2012.
12) The Smart Highway Project, http://www.smart- highway.or.kr, 2013.
13) R. F. C. Guerreiro and P. M. Q. Aguiar, “Con- nectivity-enforcing Hough Transform for the Robust Extraction of Line Segments,” IEEE Transactions on Image Processing, Vol.21, No.12, pp.4819-4829, 2012.