CopyrightⒸ2015 KSAE / 138-04 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2015.23.5.486 Transactions of KSAE, Vol. 23, No. 5, pp.486-493 (2015)
전기 자동차 가상 플랫폼용 배터리 모델 개발 및 검증
김 선 우1)․조 종 민2)․한 재 영3)․김 성 수*4)․차 한 주2)․유 상 석3)
충남대학교 대학원 기계설계 메카트로닉스공학과1)․충남대학교 전기공학과2)․충남대학교 기계공학과3)․
충남대학교 메카트로닉스공학과4)
Development of a Battery Model for Electric Vehicle Virtual Platform
Sunwoo Kim1)․Jongmin Jo2)․Jaeyoung Han3)․Sung-Soo Kim*4)․Hanju Cha2)․Sangseok Yu3)
1)Graduate School of Mechanical Design · Mechatronics Engineering, Chungnam National University, Daejeon 34134, Korea
2)Department of Electrical Engineering, Chungnam National University, Daejeon 34134, Korea
3)Department of Mechanical Engineering, Chungnam National University, Daejeon 34134, Korea
4)Department of Mechatronics Engineering, Chungnam National University, Daejeon 34134, Korea (Received 2 January 2015 / Revised 22 April 2015 / Accepted 14 May 2015)
Abstract : In this paper, a battery model for electric vehicle virtual platform was developed. A battery model consisted of a battery cell model and battery thermal management system. A battery cell model was developed based on Randles equivalent circuit model. Circuit parameters in the form of 3D map data was obtained by charge-discharge experiment of Li-Polymer battery in various temperature condition. The developed battery cell model was experimentally verified by comparing voltages. Thermal management system model was also developed using heat generator, heat transfer and convection model, and cooling fan. For verification of the developed battery model in vehicle level, the integrated battery model was applied in to EV(electric vehicle) virtual platform, and virtual driving simulation using UDDS velocity profile was conducted. The accuracy of the developed battery model has been verified by comparing the simulation results from EV platform with the experimental data.
Key words : Electric vehicle(전기 자동차), Virtual platform(가상 플랫폼), LiPB(리튬 폴리머 배터리), Thermal management(열 관리)
Nomenclature1) I : battery current, A
R : battery resistance, Ri + Rp, Ω Ri : internal resistance, Ω Rp : parallel resistance, Ω V : battery voltage, V Vocv : open circuit voltage, V Cp : parallel capacitance, F Q : heat flux, W
Tc : time constant
*Corresponding author, E-mail: [email protected]
1. 서 론
하이브리드 자동차, 전기자동차 등 친환경 자동 차에 대한 연구가 활발하게 진행되고 있다. 친환경 자동차는 기존 내연기관 차량에 적용되지 않던 부 품들을 사용하기 때문에 친환경 차량에 알맞은 새 로운 설계가 필요하다. 그러나 새로운 부품에 대해 시작품을 직접 만들고 적용하여 시험하려면 많은 시간과 비용이 필요하게 된다. 이에 따라 친환경 자 동차의 효율적인 설계를 위해서 ADVISOR, PSAT,1) VTB,2) AUTONOMIE3) 등과 같은 친환경 자동차 가 상 플랫폼이 개발되어 상용화되었다. 상용 가상 플 랫폼들은 다양한 부품 라이브러리를 구축하여 사용
전기 자동차 가상 플랫폼용 배터리 모델 개발 및 검증
자가 다양한 조합의 시뮬레이션을 수행할 수 있게 해준다. 하지만 각 모델들은 단순한 모델로 구성되 어 있어 정확한 시뮬레이션이 어렵다는 단점이 있 다. 특히 친환경 자동차의 성능에 큰 영향을 미치고 있는 배터리 모델은 온도조건에 따른 배터리 응답 특성을 제대로 반영하지 못하고 있다.
본 논문에서는 이러한 문제점을 보완하기 위해 배터리의 온도 특성을 반영한 가상 플랫폼용 배터 리 모델을 개발하였다. 다양한 온도 조건에서 실제 리튬 폴리머 배터리를 이용한 충방전 실험을 통해 모델 파라미터를 추출하고 실제 배터리 단품 실험 을 통하여 개발된 모델을 검증하였다. 또한 최적의 온도에서 배터리가 동작하도록 열관리 시스템을 모 델링하고 배터리 모델과 통합하여 하나의 배터리 모듈을 구성하였다. 개발된 배터리 모듈을 가상 전 기자동차 플랫폼에 적용하고 미국환경 보호국 (EPA)의 연비 테스트 기준인 UDDS(Urban Dyna- mometer Driving Schedule) 주행 프로파일을 이용한 가상 주행 시뮬레이션을 통해 차량 레벨에서의 배 터리 성능을 검증하였다.
2. 전기자동차용 가상 플랫폼
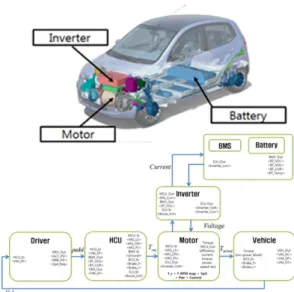
전기 자동차용 가상 플랫폼4-6)은 상용프로그램인 MATLAB/Simulink를 기반으로 구현되었으며 Fig. 1과 같이 실제 전기자동차의 주요 부품을 조합하여 모델 링 할 수 있도록 부분 시스템별 모듈을 구성하였다.
운전자 모델은 다양한 속도 프로파일을 설정할 수 있으며 현재 속도와 속도 프로파일의 요구 속도 와의 차이를 비례적분 제어를 통해 페달 값을 출력 한다. 이때 제어 게인 값 변경에 따라 운전자의 성향 도 반영 할 수 있다.
상위 제어기 모델은 운전자 모델로부터 페달 값 을 전달 받아 차량 모듈의 정보로 이용하여 요구 토 크를 생성한다. 이 요구 토크는 모터 모델로 전달된 다. 모터 모델은 실험에 의한 맵(map)기반의 모터 모 델로, 상위 제어기 모델로부터 받은 신호를 통해 모 터나 발전기의 역할을 수행한다. 모델 내부의 토크- 속도 맵과 효율 맵을 이용하여 모터의 현재 속도와 요구 토크를 확인하여 출력토크를 계산하여 출력한다.
동시에 출력토크를 내기 위한 요구 전류를 출력하
Fig. 1 Virtual EV platform
여 인버터에 전달한다.
차량 모델은 종방향 차량모델이다. 모터로부터 인가받은 토크와 주행 저항을 차량 동역학 식에 적 용하여 차량의 속도를 계산한다.
인버터 모델은 모터로부터 요구 전류를 전달 받 아 내부 효율과 배터리의 전압을 고려하여 배터리 에 요구 전력값를 전달한다.
배터리 모델은 요구 전력값에 따라 현재 배터리 상태에 알맞은 요구 전류로 계산하여 배터리 잔존 용량인 SOC(State of Charge)를 계산하고 배터리의 단자 전압을 계산한다.
3. 온도효과를 고려한 배터리 모델 개발 개발된 배터리 모델은 Fig. 2와 같이 셀의 SOC, 단
Fig. 2 Simulink battery model
Sunwoo Kim․Jongmin Jo․Jaeyoung Han․Sung-Soo Kim․Hanju Cha․Sangseok Yu
자전압을 계산하는 배터리 셀 모델과 배터리에서 발생하는 열과 냉각 팬(fan)의 동적 거동을 계산하 는 배터리 열관리 모델로 구성되어 있다.
3.1 배터리 셀 모델
배터리 셀 모델개발을 위해서, 기존 상용 플랫폼 의 배터리 셀 모델을 먼저 검토하였다. Fig. 3(a)는 Autonomie의 PNGV(the Partnership for a New Gene- ration of Vehicles) 배터리 모델이다. 저항과 커패시 터가 병렬로 연결된 후 다시 저항과 커패시터가 직 렬로 연결되어 있다. PNGV 모델은 다양한 재료의 배터리 타입에 적용이 가능하나, 충방전 모드에 따 른 배터리의 특성을 반영하지 않고 있고, SOC에 따 른 저항과 커패시터 파라미터의 변화는 반영하고 있지만 전류에 대해서는 파라미터 변화를 반영하고 있지 못한 것이 단점이다.
(a) PNGV model
(b) R model
(c) Randles model Fig. 3 Circuit based battery models
Fig. 3(b)에 나타낸 Autonomie의 또 다른 모델인 R(저항) 모델은 단순히 저항 하나로 구성된 모델이 다. R모델은 PNGV 모델과는 다르게 충방전 모드가 분리되어 있다. 온도 변화에 따른 배터리 반응을 반 영할 수 있도록 틀은 만들어져 있지만, 실제로는 온 도변화에 대해서 동일한 저항 파라미터를 사용하고 있어, 온도 효과를 반영하지 못하고 있다. 또한 R모 델의 가장 큰 단점은 단순히 저항으로만 구성되어 있어 전압 파형이 직선으로 이루어져 PNGV 모델에 비해 과도 상태 응답을 나타내는데 부적합하다.
앞서 기술한 기존 배터리 모델의 단점을 보완하 고자 본 연구에서는 Fig. 3(c)와 같은 Randles 등가 회 로 모델 기반의 배터리 셀 모델을 개발하였다. 회로 구조상 PNGV 배터리 모델과 유사하나 동작에서는 큰 차이를 보인다. 모델 내부에는 전류 변화와 온도 변화에 따른 충방전 실험으로 얻은 저항과 캐퍼시 터 파라미터를 순람표(Lookup table)로 만들어 충방 전 모드에 따라 분리하여 적용하였다. 특히 충방전 곡선을 커브 피팅하여 얻은 데이터를 적용하였기 때문에 과도상태 시뮬레이션에 적합하다.
배터리 셀 모델7,8)은 크게 SOC 계산부와 단자전 압 계산부로 구성되어 있다. 요구 전류 값과 배터리 온도를 이용하여 배터리의 SOC, 단자 전압 등을 계 산한다. SOC 계산은 전류 적산 기법을 토대로 구성 되어 있다. 충방전 전류에 따라 용량이 변하는 특성 을 보완하기 위해 Peukert 효과를 적용하였다.
다음 식 (1)은 SOC를 계산하는 식이다.
1
2
I dtk
SOC initial SOC
= −AH K
⋅
∫ (1)
여기서 AH는 배터리의 용량이며, K1, K2는 Peukert 상수이다.
배터리 단자 전압 계산부는 Fig. 3(c)의 Randles 등 가회로를 이용하여 단자전압을 계산한다. Randles 등가회로는 동적 시뮬레이션에 적합한 형태로 가장 널리 사용되는 회로이다. 더 정교한 모델링을 할 수 있으나 시스템 차수가 증가하면 연산량이 많아지는 문제가 발생한다. 따라서 전기자동차 가상 플랫폼 에서 간단하면서도 정확히 SOC 추정이 가능하도록 모델링을 다음과 같이 하였다. 식 (2)는 단자 전압을
Development of a Battery Model for Electric Vehicle Virtual Platform
계산하는 식을 나타낸다. 무부하 정상상태에서의 배터리 단자전압인 배터리 개로전압 , 배터리 내부저항 , 분극 현상을 나타내는 충방전 전류에 의한 이온화 손실 저항 및 이중층의 커패시턴스
, 시상수 로 구성된다.
( ) ( (1 t T/ c))
ocv i p
V V= SOC −I R +R −e− (2)
c p p
T =R ×C (3)
배터리 모델의 파라미터는 충방전 전류의 크기, 잔존용량, 충방전 모드 뿐만 아니라 온도 조건에 따 라 변하는 특징을 있다. 이를 반영하기 위해 위 조건 들을 고려하여 정전류 펄스방법으로 파라미터를 추 출하여 위 식에 적용하였다.9)
회로 모델의 파라미터를 추출하는 실험은 Fig. 4 와 같은 시험장치(Test bench)를 구성하여 수행하였다.
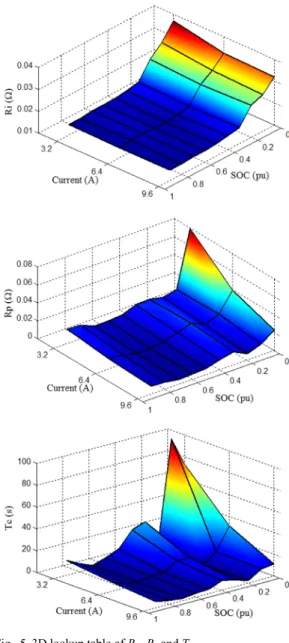
배터리에 전류가 인가되면 나타나는 전압의 변화 를 통해 배터리 모델의 파라미터를 구한다. 0°C, 25°C, 40°C의 온도 조건에서 3.6A(1C), 6.4A(2C), 9.6A(3C)의 C-rate에 따라 SOC 10%부터 100%까지 10단계의 상태에 대한 펄스 방전 실험을 수행하여 배터리 모델의 파라미터를 추출하였다.9) Fig. 5는 각 각 25°C의 배터리 내부저항 , , 를 3차원 그 래프로 나타낸 것이다. 배터리 내부저항 , , 는 동일한 C-rate에서 SOC가 작아질수록 값이 증가하 고 있으며 동일한 SOC 조건에서는 C-rate가 커질수 록 값이 감소하는 특성을 보인다. 다양한 온도에 시 뮬레이션 할 수 있도록 보간법에 의하여 세가지 온 도 사이의 값들을 출력할 수 있도록 하고 있다.
Fig. 6은 앞서 언급한 3D 순람표를 적용하여 구현 한 배터리 Matlab 모델의 단자 전압 계산부이다. 온
Fig. 4 Test bench
Fig. 5 3D lookup table of Ri, Rp and Tc
Fig. 6 Simulink block of nominal voltage calculation
김선우․조종민․한재영․김성수․차한주․유상석
Table 1 Specification of Li-Polymer battery
Item Spec
Nominal capacity TYP.3.200 mAh
Nominal voltage 3.7 V
Charge condition
Max. Current 2.0 C (6,400 mA) Votage 4.20 ± 0.03 V Discharge
condition
Max. Current 20 C (64,000 mA) Cut-off voltage 2.7 V
도, 전류, SOC 조건에 따라 파라미터를 추출함으로 써 배터리 단자 전압을 계산하도록 하였다. 충전과 방전 곡선을 비교하면 히스테리시스 곡선을 보이 며, SOC에 따른 파라미터가 달라지기 때문에 충전 과 방전의 단자 전압 계산을 전류의 방향에 따라 분 리하였다.
개발된 배터리 셀 모델의 검증을 위해서 Table 1 과 같은 실제 리튬 폴리머 배터리 사양을 적용하였다.
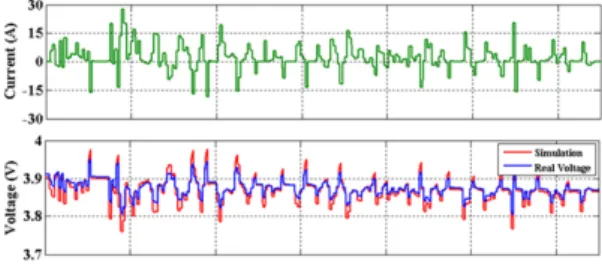
배터리 셀 모델을 검증하기 위하여 단품 레벨의 충방전 실험을 수행하였다. UDDS 주행시 전기자동 차의 전류 패턴을 배터리의 사양에 알맞게 1/6으로 축소 구현하여 실제 배터리 모델과 개발된 배터리 모델에 적용하여 전압을 확인하였다. 실제 차량이 UDDS 주행 시에 나타나는 최대 방전 전류와 충전 전류는 각각 167.4A, 111A이다. 현재 배터리 실험을 위해 마련한 배터리의 셀 당 입력되는 최대 전류 2C-Rate를 만족하게 하기 위하여 전류 패턴을 1/6으 로 축소하였다. 그리고 배터리 팩 내부에 버스바나 릴레이는 제품 설계단계에서 전압강하를 줄이기 위 하여 저항 성분이 극소가 되게 설계하였다.
다음 Fig. 7은 검증 실험 결과를 나타낸 것이다. 위 그래프는 UDDS 주행시의 1/6 크기의 전류 패턴이 며, 아래 그래프는 배터리의 전압을 나타낸다. 실제 배터리 전압과 개발된 배터리 모델의 전압이 거의
Fig. 7 Simulation result of battery test
동일한 경향을 보이고 있다.
식 (4)를 이용하여 두 전압의 최대오차율을 확인 해보았다. 오차는 최대 80mV가 발생하며 최대 오차 율은 2.2%로 매우 낮은 오차율을 나타내고 있다.
100
real vir
real
V V
ε= V− ×
(4) 개발된 배터리 모델은 실제 배터리의 특성을 구 현하는데 높은 정확도를 보이고 있음을 확인하였다.
3.2 배터리 열관리 모델
배터리 열관리 모델은 배터리가 적정 온도에서 구동하도록 하여 배터리의 수명을 유지시키고 주행 간 성능이 유지되도록 하는 역할을 수행한다.
개발된 배터리 열관리 모델10)은 열 발생, 열 전달, 압력 강하 모델 등으로 구성되어 있다. 열 발생과 열 전달 모델은 배터리 셀의 온도를 계산하기 위해서 사용되며, 압력강하 모델은 냉각 팬의 전력을 계산 하기 위해서 사용된다.
배터리 내부에서 발생하는 열은 충방전에 따라 다르게 계산된다. 방전시에는 식 (5)와 같이 전류 I 및 내부저항 R에 의해서 계산되며, 충전시에는 식 (6)과 같이 전류, 내부저항 이외에 충전에 의한 쿨롱 (columbic) 효율을 고려해야 한다.10)
Q I R= 2 (5)
2 (1 coulomb)
Q I R IV= − −η (6)
배터리 팩을 전기자동차에 정렬되어 있는 각기둥 의 형태로 설정하였으며, 배터리 팩에서 발생되는 열은 냉각 팬을 통해 유입된 냉각 공기에 의해 제거
Fig. 8 Schematics of a cooling system
전기 자동차 가상 플랫폼용 배터리 모델 개발 및 검증
된다. 이 냉각 공기의 유량에 따라 발생하는 압력 강 하를 극복하기 위해 요구되는 팬의 동력을 압력 강 하 모델이 계산한다.
배터리 열관리 시스템은 배터리 온도가 기준 온 도인 303.15k 이상으로 올라가면 배터리의 온도와 기준 온도의 차이를 비례적분 제어로 냉각공기의 유량이 결정된다. 배터리의 온도가 증가하면 냉각 공기가 유입되어 배터리의 온도 증가를 막게 된다.
냉각공기의 유량에 따라 상용 팬 모델 용량인 500W 에 알맞게 팬의 동력이 계산되어 상응하는 전력을 소모하게 된다.
배터리 열관리 시스템은 배터리 셀 모델과 통합 되어 셀 모델의 저항 등의 데이터로부터 배터리의 온도를 계산하고 배터리 셀 모델은 열관리 시스템 모델로부터 온도를 전달받아 온도를 고려한 배터리 SOC 및 단자전압을 계산한다.
4. 차량 플랫폼을 이용한 배터리 성능 확인 차량 레벨에서의 배터리 성능을 확인하기 위하여 Table 2의 실차 사양11)을 이용하여 전기자동차 플랫 폼을 구성하였다.
Table 3은 실차 배터리와 개발된 배터리 모델을 비교한 것이다. 실차의 배터리 셀 전압은 3.7V로 리 튬 폴리머 배터리와 동일하나 용량은 약 16배가 차 이가 난다. 개발된 배터리 모듈을 Table 2의 전기차 량에 적용하기 위해서는 용량 매칭이 필요하다. 이 를 위해 88개의 셀을 직렬로 연결하여 330V 전압의 배터리 모듈을 구성하였고 16배 차이의 용량을 매 칭하기 위해 모듈을 병렬로 16개를 연결하여 실차 배터리 용량에 근사한 16.8kwh의 배터리 시스템을 구성하였다.
구성된 전기자동차 가상 플랫폼을 이용하여 UDDS
Table 2 Specification of EV platform
Item Spec
Motor Max output (kw) 50
Max torque (Nm) 167
Vehicle Weight (kg) 1130
Battery
Type Li-polymer
Capacity (kwh) 16.4
Volt (V) 330
Table 3 Comparison of battery spec
Vehicle Virtual platform
Capacity (Ah) 49.69 3.229
Volt (V) 3.7 3.7
Number of cell 88 88
Number of module 1 16
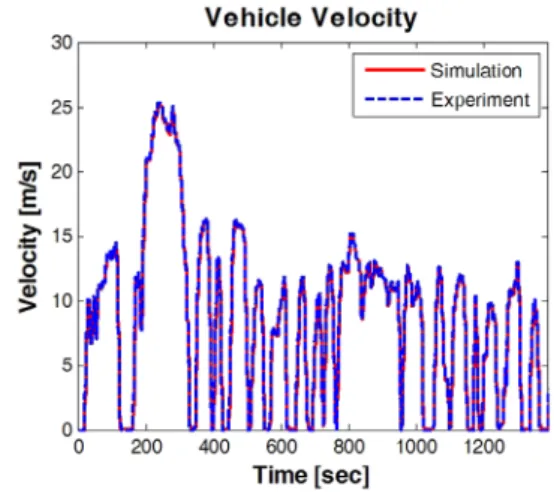
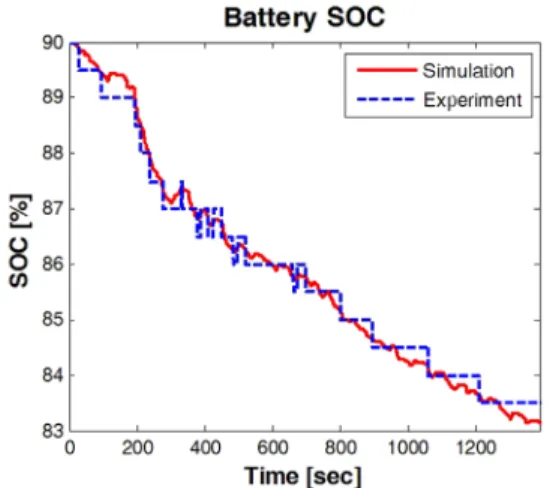
주행 시뮬레이션을 수행하였다. 초기 조건으로 초 기 배터리 SOC를 90%, 배터리 초기 온도를 298.15k 로 설정하였다. UDDS 속도 프로파일을 운전자 모 델에 적용하여 가상 주행 시뮬레이션을 1cycle 수행 하였다. 시뮬레이션 결과를 출력하여 실차 UDDS 주행 테스트 결과와 비교하였다. 차량의 속도, 배터 리 SOC, 배터리 전압을 각각 비교했다.
Fig. 9는 차량의 속도를 비교한 결과이다. 차량 모 델이 속도 프로파일의 속도를 잘 추종하고 있음을 확인할 수 있다. Fig. 10, Fig. 11은 각각 배터리 SOC, 전압 결과를 비교한 그래프이다.
배터리 SOC의 결과는 충 방전의 경향과 초기, 최 종 SOC 값이 거의 동일하게 나타나고 있다. 평균 오 차율은 약 0.17%이다. 배터리 전압은 평균 1.0819V 차이로, 평균 오차율로 0.31%의 차이가 나며 최대 오차율은 약 2.3%로서 매우 경향이 유사한 것을 알 수 있었다.
개발한 배터리 모델의 시뮬레이션 결과가 실차 시험 결과와 경향이 매우 유사하게 나타나는 것으 로 개발된 배터리 모델의 정확성을 검증할 수 있 었다.
Fig. 9 Simulation result of velocity
Sunwoo Kim․Jongmin Jo․Jaeyoung Han․Sung-Soo Kim․Hanju Cha․Sangseok Yu
Fig. 10 Simulation result of battery SOC
Fig. 11 Simulation result of battery voltage
Fig. 12 Simulation result of battery temperature
배터리의 열관리 시스템 모델의 성능도 확인했 다. Fig. 12는 배터리의 온도 변화 나타낸 그래프이
다. 배터리 사용으로 인해 배터리의 온도가 올라가 는데 배터리 열관리 제어로 인해 기준 온도인 303.15K를 약 3K의 오차 범위에서 유지되고 있는 것을 확인할 수 있으며, 전체 전력에 비해 적은 양이 지만 팬 요구 전력 또한 온도 제어에 따라 소모되는 것을 확인하였다.
5. 결 론
온도영향을 고려한 전기자동차 가상 플랫폼용 배 터리 모델을 개발하였다. 배터리 셀 모델은 등가 Randles 등가회로를 이용하여 구성하였고, 회로의 파라미터는 리튬 폴리머 배터리를 이용한 다양한 온도조건에서의 C-rate 별 방전 실험을 통해 충방전 전류 및 온도를 고려한 3D 순람표로 구성하였다.
3D 순람표를 이용하여 단자전압 계산부를 모델링 하고 Peukert 효과를 고려한 전류적산기법을 통해 배터리 SOC 계산부를 모델링 하였다.
실제 리튬 폴리머 단품 배터리 셀 테스트를 통하 여, 개발된 배터리 셀 모델의 전압오차율이 2.2% 이 내로 정확성을 검증 할 수 있었다.
또한 배터리의 열 발생, 열 전달, 방열, 압력 강하 및 냉각 팬 모델을 구성하여 배터리 열관리 시스템 을 모델링 하였다.
실차 데이터를 가상 전기자동차 플랫폼에 적용하 고, UDDS 주행 시뮬레이션을 수행하여 시뮬레이션 결과를 실차 UDDS 주행 테스트 결과와 비교 확인 하였다. 배터리 SOC, 전압을 비교한 결과, SOC는 0.17% 평균오차율을 보였고, 전압은 0.31% 평균오 차율로 차량레벨의 시뮬레이션에서도 개발한 배터 리 모델의 정확성을 검증할 수 있었다.
열관리 시스템의 성능은 기준 온도인 303.15K의 3K 오차 범위에서 유지되는 것을 확인하였으며 온도 제어를 위한 팬 요구 전력이 출력됨을 확인하였다.
추후 연구로는 현재의 전류적산 기법의 SOC 계 산 방법에서 발생할 수 있는 누적 오차의 개선 방법 에 관한 연구가 필요하다.
후 기
본 연구는 산업통상자원부에서 시행한 산업융합 기반 구축사업 ‘그린카 부품 상용화지원을 위한 가
Development of a Battery Model for Electric Vehicle Virtual Platform
상개발환경(VIDE) 개발’(과제번호 10035209)의 지 원으로 수행되었습니다. 이에 관계자 여러분께 감 사드립니다.
References
1) Laboratory National Renewable Energy, AD- VISOR PSAT User Conference, ANL, 2001.
2) U. G. Levent, B. Khalid, A. D. Roger, S. Enrico and W. B. Charles, “A Virtual Prototype for a Hybrid Electric Vehicle,” Mechatronics, Vol.12, No.4, pp.575-593, 2002.
3) Laboratory Argonne National, ANL - Autonomie Help Part 10 - Main Plant Models Description, ANL, 2009.
4) S. G. Lee, H. J. Shin, N. T. Jeong, C. H. Bak, K. Y. Jung, H. S. Kim, S. H. Hwang and M. W.
Suh, “Development of Component Design Environment for a Electric Vehicle Using Virtual Integrated Development Environment,”
KSAE Spring Conference Proceedings, pp.1259- 1262, 2014.
5) S. M. Yang, N. T. Jeong, K. S. Kim, S. B. Choi, W. Maosen, H. S. Kim and M. W. Suh,
“Development of Urban Driving Cycle for Performance Evaluation of Electric Vehicles Part I: Development of Driving Cycle,” Trans- actions of KSAE, Vol.22, No.7, pp.117-126, 2014.
6) J. H. Park, C. M. Jeong, C. Ma, M. W. Suh, H.
S. Kim and S. H. Hwang, “Development of Real-time Simulation Environment for Perform- ance Analysis of Eco-friendly Vehicle,” KSAE Spring Conference Proceedings, pp.47-53, 2012.
7) I. K. Park, D. S. Kim and H. J. Cha, “EV Car Battery Charge and Discharge Simulation Verification for Implementation and Experi- ments of the Bidirectional DC-DC Charger,”
Power Electronics Annual Conference, pp.35- 36, 2013.
8) J. W. Lee, C. Y. Park and H. J. Cha, “Analysis and Verification of a LiPB Model for Temp- erature Variation,” Power Electronics Annual Conference, pp.478-479, 2014.
9) S. I. Kong, D. S. Kim and H. J. Cha, “NiMH Battery Modeling and Test considering C-rate, Temperature and SOC,” Power Electronics Annual Conference, pp.413-414, 2012.
10) J. Y. Han, J. S. Park, S. S. Yu and S.-S. Kim,
“One-dimension Thermal Modeling of NiMH Battery for Thermal Management of Electric Vehicles,” Transactions of KSAE, Vol.38, No.3, pp.227-234, 2014.
11) M. H. Lee, J. H. Kim, K. H. Kim, C. S. Jung and H. J. Oh, “A Study on the Performance Characteristics of Electric Vehicles (EVs) according to the Driving Modes and Climate Conditions,” KSAE Spring Conference Pro- ceedings, pp.1976-1981, 2013.