CopyrightⒸ2014 KSAE / 127-23 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2014.22.1.174 Transactions of KSAE, Vol. 22, No. 1, pp.174-182 (2014)
2륜 및 4륜 구동 하이브리드 전기 자동차의 후방향 시뮬레이션 기반 연비 및 성능 평가
정 종 렬1)․김 형 균1)․김 기 영1)․임 원 식2)․차 석 원*1)
서울대학교 기계항공공학부1)․서울과학기술대학교 기계자동차공학과2)
Evaluation of Fuel Economy and Performance for 2WD and 4WD Hybrid Electric Vehicle Based on Backward Simulation
Jongryeol Jeong1)․Hyungkyoon Kim1)․Kiyoung Kim1)․Wonsik Lim2)․Suk Won Cha*1)
1)School of Mechanical & Aerospace Engineering, Seoul National University, Seoul 151-744, Korea
2)Department of Mechanical and Automotive Engineering, Seoul National University of Science and Technology, Seoul 139-743, Korea
(Received 1 July 2013 / Revised 25 July 2013 / Accepted 7 August 2013)
Abstract : Recently, not only common types of hybrid electric vehicle (HEV) such as series or parallel but many other types of HEVs including 4WD hybrid electric vehicle have been developed and released. In this study, analysis of fuel economy and driving performance for 2WD and 4WD HEV are conducted using backward simulation based on dynamic programming. To analyze the characteristics of 4WD HEV, tire slip model based on vehicle dynamics was applied to the backward simulation program. As a result, 2WD HEV shows better fuel economy than 4WD HEV because of relatively simple configuration. However, in a severe road condition, 4WD HEV shows better driving performance that 2WD HEV had about 6% of impossible time to follow the driving cycle though the 4WD HEV had no impossible time.
Key words : Hybrid electric vehicle(하이브리드 전기 차량), Tire slip model(타이어 슬립 모델), Backward simulation(후방향 시뮬레이션), Dynamic programming(동적 계획법), Fuel economy(연비), Driving performance (주행 성능)
Nomenclature1) C : longitudinal tire stiffness, N F : force, N
J : total cost of the problem L : step cost of the problem N : number of steps
g : acceleration of gravity, m/s2 h : height, m
k : state of step l : length, m
*Corresponding author, E-mail: [email protected]
m : mass, kg u : control variable v : velocity, m/s x : state variable
: angle of grade, deg
: friction coefficient
: slip ratio
Subscripts aero : aerodynamic resistance f, r : front, rear
x, z : direction
2륜 및 4륜 구동 하이브리드 전기 자동차의 후방향 시뮬레이션 기반 연비 및 성능 평가
1. 서 론
차량의 연비 개선 및 배출가스 저감을 위한 하이 브리드 전기 자동차는 적용 차량 단품 및 동력 전달 계의 구성 상태에 따라 크게 직렬형 및 병렬형 하이 브리드 자동차로 구분된다.1) 최근 각 자동차 제조사 의 특허 경쟁 및 추가 연비 및 성능 개선을 위해 더 욱 세분화된 종류의 다양한 하이브리드 자동차가 개발되고 있다.2) 본 연구에서는 하이브리드 전기 자 동차의 대표적 종류 중 하나인 병렬형 하이브리드 전기 자동차와 상대적으로 새로운 개발 종류인 인 라인 시스템 방식의 4륜 구동 하이브리드 전기 자동 차에 대한 연구를 수행하였다. 병렬형 하이브리드 전기 자동차의 경우, 전륜에 차량 구동을 위한 엔진 및 모터가 한 축을 통해 연결되어 차량을 구동하는 동력 전달 시스템이다. 반면, 인라인 시스템 방식의 4륜 구동 하이브리드 전기 자동차는 차량의 전륜은 기존 엔진 구동 차량과 같이 엔진의 출력을 활용하 여 차량의 구동을 수행하게 되며, 차량의 후륜 축에 모터를 연결하여 전륜 및 후륜 모두 차량의 구동 바 퀴가 되는 4륜 구동 시스템이다.
본 연구에서는 각 차량의 단품 및 시스템 특징을 분석하여 차량 시뮬레이션 모델을 개발하고, 이를 바탕으로 동적 계획법을 활용한 후방향 시뮬레이션 프로그램을 개발 및 수행하였다. 또한 시뮬레이션 결과를 바탕으로 각 차량의 연비 및 성능 특성을 분 석하였다.
2. 2륜 및 4륜 구동 하이브리드 전기 자동차 본 연구에서는 차량의 전륜 축에 차량의 구동을 위한 엔진 및 모터가 함께 연결되어있는 2륜 구동 하이브리드 전기 자동차 및 차량의 전륜에는 엔진 이 연결되어 있고, 후륜에는 모터가 연결되어 있는 4륜 구동 하이브리드 전기 자동차의 모델링 및 시뮬 레이션을 수행하고, 시뮬레이션 결과를 바탕으로 각 차량의 특성을 비교 분석하였다.
2.1 2륜 구동 하이브리드 전기 자동차 2륜 구동 하이브리드 전기 자동차의 경우, 기존의 하이브리드 차량과 같이 차량의 전륜에 차량의 구
Fig. 1 Configuration of 2WD hybrid electric vehicle system
Fig. 2 Configuration of 4WD hybrid electric vehicle system
동을 위한 엔진과 모터가 Fig. 1과 같이 함께 연결되 어 있다. 이는 기존의 병렬형 하이브리드 전기 자동 차와 같이, 모터만을 이용한 전기 구동 모드(EV mode), 엔진만을 이용한 엔진 단독 구동 모드 (En- gine only mode), 엔진과 모터의 구동력을 동시에 이 용하여 차량을 구동하는 하이브리드 모드(HEV mode), 차량의 제동 에너지를 활용하여 모터를 통해 배터리를 충전하는 회생 제동 모드(Regenerative braking mode) 및 엔진의 구동력을 바탕으로 차량의 주행 및 배터리의 충전을 동시에 수행하는 엔진 구 동 배터리 충전 모드(Battery charging from the engine mode) 등의 주행이 가능하다.3)
2.2 4륜 구동 하이브리드 전기 자동차 본 연구에서 적용된 인라인 시스템 방식의 4륜 구 동 하이브리드 전기 자동차는 Fig. 2와 같이 차량의 전륜은 엔진에 의해 구동되며, 후륜은 모터에 의해
Jongryeol Jeong․Hyungkyoon Kim․Kiyoung Kim․Wonsik Lim․Suk Won Cha
(a) (b)
(c) (d)
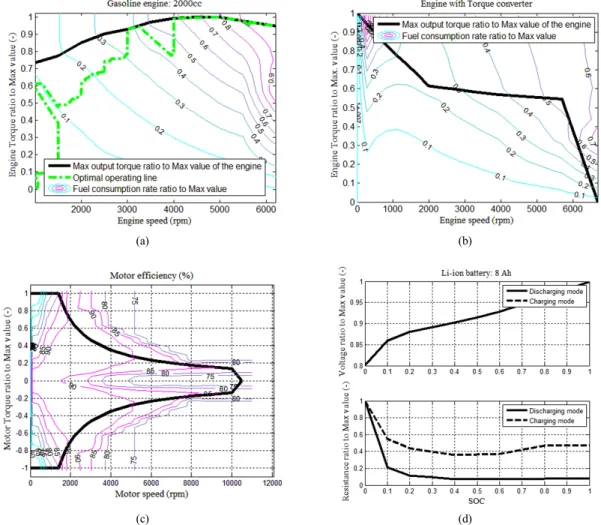
Fig. 3 Map based modeling of powertrain components: (a) Engine, (b) Engine with torque converter (c) Motor, (d) Battery 구동되는 특성을 갖고 있다. 따라서 전・후륜이 별도
의 동력원에 의해서 구동되며, 기존 하이브리드 전 기 자동차와 달리 동력 분배를 위한 부품이 필요하 지 않기 때문에 시스템 개발이 상대적으로 간단하 다는 특징이 있다. 이는 2륜 구동 하이브리드 전기 자동차와 같이 전기 구동 모드, 엔진 단독 구동 모 드, 하이브리드 구동 모드, 회생 제동 모드 및 엔진 구동 배터리 충전 모드 등의 구동이 가능하다.3,4)
3. 후방향 시뮬레이션 프로그램 본 연구에서는 2륜 구동 및 4륜 구동 하이브리드 전기 자동차의 연비 및 성능 분석을 위한 후방향 시 뮬레이션 프로그램을 개발하였다. 이를 위하여 먼 저 엔진, 모터 및 배터리 등의 차량 주요 구동 시스
템 단품에 대한 모델링을 수행하였으며, 특히 기존 개발 시뮬레이션 프로그램과 달리 2륜 구동 및 4륜 구동의 차이를 분석하기 위한 차량 동역학 타이어 슬립 모델을 적용한 시뮬레이션을 수행하였다. 각 개발된 단품 모델의 통합 및 동적 계획법(Dynamic programming)을 바탕으로 자체 개발된 후방향 시뮬 레이션 프로그램을 활용하여 연구를 수행하였다.
3.1 차량 구동 시스템 모델 개발
2륜 구동 차량 및 4륜 구동 차량의 시뮬레이션 수 행을 위하여 각 차량의 동력 전달계 시스템의 단품 모 델링을 수행하였다. 각 차량의 엔진, 모터 및 배터리 단품에 대한 모델링을 수행하였으며, Fig. 3과 같이 각 단품의 작동 상태에 대한 맵 기반의 연료 소모량,
Evaluation of Fuel Economy and Performance for 2WD and 4WD Hybrid Electric Vehicle Based on Backward Simulation
효율 및 저항 등의 계산을 통해 각 단품에서의 소모 에너지를 계산하게 된다.5) 특히, 엔진의 구동력을 전 달하는 토크 컨버터의 특성을 고려하여 변형된 형태 의 최대 토크 및 연료 소모량을 계산하여 Fig. 3(b)와 같이 엔진 및 토크 컨버터 모델을 함께 적용하였다.
3.2 타이어 슬립 모델 개발
엔진 및 모터를 통해 차량 동력 전달계를 거쳐 바 퀴로 전달된 차량의 구동력은 식 (1)과 같이 바퀴에 작용하는 수직 항력, 바퀴 슬립율 및 마찰계수 등에 따라 결정된 후 지면으로 전달되어 차량을 구동하 게 된다.6)
(1) 따라서, 먼저 차량의 타이어 슬립 모델을 시뮬레 이션에 적용하기 위하여 식 (2) 및 (3)과 같이 각 바 퀴에 작용하는 수직 항력을 계산하였다.
cos
(2)
cos
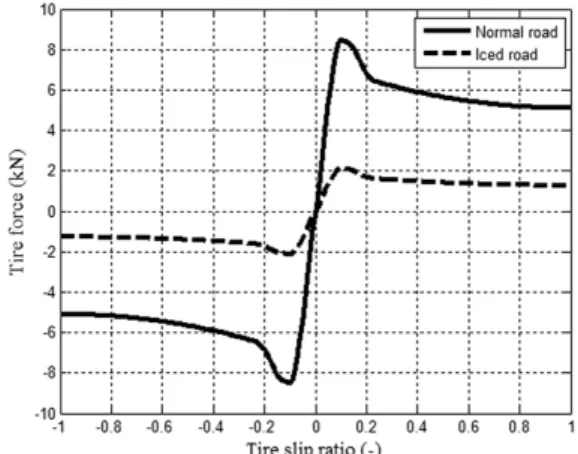
(3) 차량의 주행 상태에 따른 각 바퀴의 수직항력이 계산되면, 이를 바탕으로 Fig. 4와 같이 차량 속도와 바퀴의 회전속도에 따른 바퀴 슬립율 및 지면 마찰 계수에 따라 차량 바퀴에서 차량의 구동을 위해 전 달되는 힘을 계산할 수 있게 된다.7) 본 시뮬레이션 모델에서는 후방향 시뮬레이션의 특성 상, 주어진 차량 속도에 따른 요구 구동력을 먼저 계산하고 Fig. 4 의 바퀴 특성을 바탕으로 차량의 요구 구동력 및 수 직항력 값을 계산하여 식 (4)와 같이 바퀴의 슬립율 을 계산하게 된다.
(4)
계산된 바퀴의 슬립율 및 요구 구동력을 바탕으 로 차량의 엔진 및 모터 등 단품의 작동 속도 및 토 크 상태를 결정하게 되며, 이를 이용하여 차량의 목 표 주행 사이클 주행 시 연비 및 주행 성능 등의 분 석을 수행 하게 된다.
Fig. 4 Tire force as a function of slip ratio
3.3 동적 계획법(Dynamic Programming) 개발된 각 단품 모델 및 차량 통합 시뮬레이션 모 델을 바탕으로 주어진 주행 사이클에 따른 차량의 최적 동력 분배량을 계산하기 위하여 최적화 이론의 하나인 동적 계획법(Dynamic Programming)을 적용 하였다. 동적 계획법은 벨만의 최적화 이론(Bell- man’s optimality)을 바탕으로 주어진 단계적 문제의 제한 조건을 만족하는 목표 비용을 최소화하는 경로 를 탐색하는 최적화 방법이다. 이는 식 (5)와 같이 k 에서 N 단계까지의 최적 경로를 계산할 때, k+1부터 N 단계까지의 계산 결과를 바탕으로 k에서 k+1 단계 의 최적 비용만을 계산하므로, 주어진 문제의 단계 수가 증가하더라도 계산량이 기하급수적으로 증가 하지 않고 산술적으로 증가한다는 장점이 있다.8,9)
min
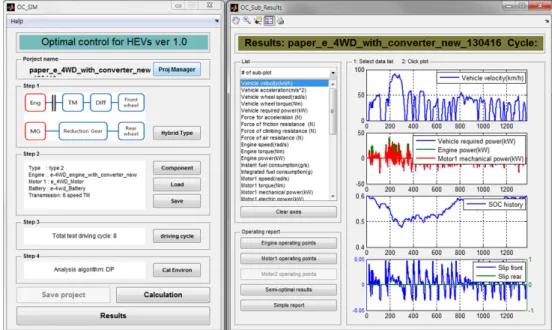
(5) 본 연구에서는 동적 계획법의 상태 함수인 x(k)를 배터리의 SOC(State of Charge), 제어 함수인 u(k)를 배터리의 출력으로 정의하였으며, 각 단계의 비용 L 및 전체 비용 J를 엔진의 연료 소모량으로 정의하여 Fig. 5와 같이 개발된 시뮬레이션 프로그램을 바탕 으로 시뮬레이션을 수행하였다.10)
4. 시뮬레이션 및 결과 4.1 시뮬레이션 조건
시뮬레이션 수행을 위하여 두 차량 시스템 모두
정종렬․김형균․김기영․임원식․차석원
Fig. 5 Backward simulation program for 2WD & 4WD hybrid electric vehicle
Table 1 Specifications of the vehicle and components Vehicle specification
Weight 1800kg
Air density 1.204kg/m3
Frontal area 2.4m2
Air drag, Cd 0.45
Rolling resistance 0.009
Tire radius 0.35m
Vehicle power source's capacity
Engine size 2000cc (110kW)
Motor Max. power 30kW
Battery capacity 8Ah
Applied driving cycles
FTP72 1372s (11.99km)
HWFET 764s (16.51km)
Japan1015 660s (4.16km)
NEDC 1180s (11.01km)
동일하게 Fig. 3의 2000cc 급의 엔진 데이터, 최대 출 력 30kW의 모터 데이터 및 8Ah의 배터리 데이터가 적용되었으며, 배터리 SOC의 초기 값 및 말기 값을 동일하게 설정하여 배터리 SOC 변화로 인한 연비 결과 값의 영향이 없도록 시뮬레이션을 수행하였 다. 차량 주행 사이클은 총 4개 주행 사이클이 적용 되었으며, Fig. 4와 같이 일반 도로면과 함께 마찰계
수가 상대적으로 낮은 미끄러운 도로면 상태를 적 용한 시뮬레이션 또한 수행하였다. 구체적인 차량 제원 및 적용 주행 사이클은 Table 1과 같다.11)
4.2 일반 도로 시뮬레이션 결과
4개 주행 사이클을 적용하여 각 차량 시스템 별 4 회씩 총 8회의 시뮬레이션을 수행하였다. 시뮬레이 션에 적용된 차량 마찰 계수는 0.8로 적용되었으며, 이는 바퀴에 가해지는 수직항력 대비 약 10% 내외 의 슬립율에서 최대 80% 수준의 구동력 전달이 가 능한 것으로 가정하여 시뮬레이션을 수행하였다.
시뮬레이션 결과, 차량의 연비는 Table 2와 같다. 주 행 사이클에 따라 차이는 있지만, 2륜 구동 하이브 리드 전기 자동차 대비 4륜 구동 하이브리드 전기 자동차의 연비가 평균적으로 약 5% 이상 낮은 것을 확인할 수 있었다. 이러한 결과의 원인은 두 차량 시 스템 모두 차량 시스템 구조를 제외하고 동일한 제 원이 적용되어 시뮬레이션이 수행되었기 때문에 각 차량의 구조적 특성에서 찾아볼 수 있을 것으로 생 각된다. 첫 번째 이유로, 엔진의 출력 토크를 요구 토크량 보다 높여 엔진을 상대적으로 효율이 좋은 지점에서 작동시킴과 동시에 남는 출력 에너지를 모터를 이용하여 배터리를 충전하는 엔진 구동 배
2륜 및 4륜 구동 하이브리드 전기 자동차의 후방향 시뮬레이션 기반 연비 및 성능 평가
Table 2 Simulation results of fuel economy on normal friction coefficient road
Fuel economy (km/L) Driving
cycle Vehicle type
FTP72 HWFET Japan
1015 NEDC Average
2WD
HEV 20.58 14.90 22.47 17.43 18.85 4WD
HEV 19.21 14.21 21.09 16.58 17.77
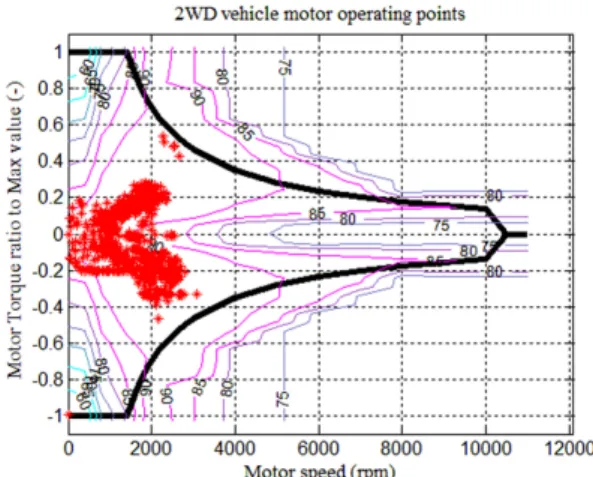
터리 충전 모드 적용 시, 2륜 구동 하이브리드 전기 자동차의 경우 엔진과 모터가 동일 축을 통해 작동 하기 때문에 엔진에서 출력되는 토크가 즉시 모터 를 통해 배터리 충전 에너지로 적용되게 된다. 반면 4륜 구동 하이브리드 전기 자동차의 경우 엔진과 모 터가 서로 다른 축에 연결되어 있기 때문에 엔진에 서 출력된 여분의 토크가 모터에 전달되기 위해서 는 각종 기어를 비롯한 상대적으로 많은 동력 전달 과정을 거치게 된다. 이러한 과정에서 엔진에서 출 력되는 여분의 토크는 효율로 인한 감소가 발생하 게 되며, 따라서 모터를 통해 배터리에 저장되는 에 너지는 상대적으로 적은 양이 충전되게 된다. 이와 같은 구조적 특성 때문에, 2륜 구동 하이브리드 전 기 자동차 대비 4륜 구동 하이브리드 전기 자동차의 연비가 낮은 것으로 생각할 수 있다. 또 다른 이유 로, 2륜 구동 하이브리드 전기 자동차의 경우 차량 의 기어 변속 트랜스미션이 연결되어 있는 전륜에 차량의 모터가 함께 연결되어있다. 따라서 적절한 기어 단수의 선택을 바탕으로 엔진 및 모터의 작동 속도를 최대한 높은 효율을 구할 수 있는 속도로 일 정 부분 제어가 가능하다. 반면 4륜 구동 하이브리 드 전기 자동차의 경우 모터가 단순 감속기어로 구 성되어 있는 후륜축에 연결되어 있다. 따라서 모터 의 작동 속도는 차속에 의해서 결정되게 되며, 모터 작동 속도의 변경을 바탕으로 한 작동점의 고효율 점 지향이 불가능하다. 이러한 이유로 인해 상대적 으로 모터 효율이 낮은 지점에 더 많은 작동점의 분 포를 보이는 것을 확인할 수 있다. 이는 Fig. 6과 Fig. 7 의 모터 작동점 분석을 통해 확인할 수 있다. Fig. 6 의 2륜 구동 하이브리드 전기 자동차의 모터 작동점
Fig. 6 Simulation result: motor operating poitns of 2WD hybrid electric vehicle on FTP72
Fig. 7 Simulation result: motor operating poitns of 4WD hybrid electric vehicle on FTP72
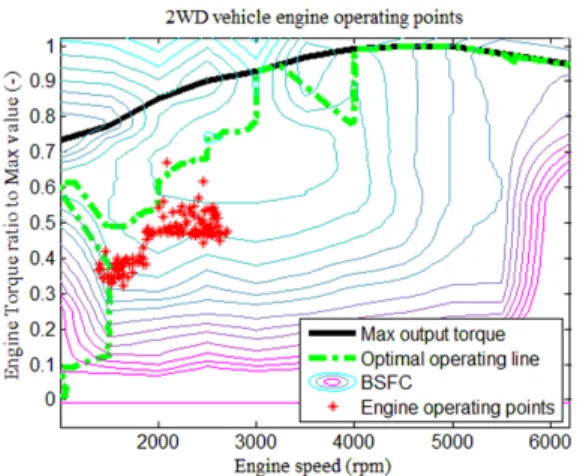
이 상대적으로 효율이 높은 작동 영역에 많은 작동 점 분포를 보이는 것을 확인할 수 있다. 반면 Fig. 7 의 4륜 구동 하이브리드 전기 차량의 모터 작동점의 경우 기어 변속이 불가능하기 때문에 상대적으로 효율이 낮은 영역에서 넓은 작동점의 분포를 보이 는 것을 확인할 수 있었다. 이러한 원인을 바탕으로 Fig. 8과 Fig. 9의 엔진 작동점 분석을 통해 연비 차이 가 발생하는 결정적인 이유를 확인할 수 있다. 4륜 구동 하이브리드 전기 자동차의 엔진 작동점의 경 우 상대적으로 2륜 구동 하이브리드 전기 자동차에 비해 저 효율 구간에서 많은 작동 상태를 보이는 것 을 확인할 수 있었다. 4륜 구동 하이브리드 전기 자 동차의 엔진 작동점이 상대적으로 저효율 영역에서
Jongryeol Jeong․Hyungkyoon Kim․Kiyoung Kim․Wonsik Lim․Suk Won Cha
Fig. 8 Simulation result: engine operating points of 2WD hybrid electric vehicle on FTP72
Fig. 9 Simulation result: engine operating points of 4WD hybrid electric vehicle on FTP72
많은 작동점 분포를 보이는 이유는, 2륜 구동 하이 브리드 전기 자동차 대비 복잡한 구조, 모터 숙도 제 어 불가능으로 인한 모터 활용도 저감 및 엔진 구동 배터리 충전 모드의 저효율성 등으로 인해 상대적 으로 엔진 단독 구동 모드의 작동이 빈번하게 발생 한 것으로 생각할 수 있다. 따라서 2륜 구동 하이브 리드 전기 자동차에서는 모터 구동 또는 엔진 고효 율지점에서의 구동이 이루어지던 지점에서 상대적 으로 엔진 저효율 영역에서의 작동이 증가하여 연 비 저하가 발생한 것으로 생각할 수 있다. 하지만 일 반적으로 4륜 구동 차량의 경우, 차량의 연비 측면 에서의 이점보다 빙판길 및 험로 등에서의 주행과 같이 가혹한 상황에서의 주행 성능 확보를 위해 개
발 및 적용되는 경우가 많다. 따라서 본 연구에서는 동일한 주행 사이클을 추종하는 주행을 수행하지만 상대적으로 마찰계수가 낮은 빙판길 상황을 가정하 여 시뮬레이션을 수행한 후 결과를 분석하였다.
4.3 미끄러운 도로 시뮬레이션 결과
도로의 마찰계수를 제외한 모든 조건이 동일한 시뮬레이션을 수행하였다. 도로 마찰계수의 경우, 일반 도로 대비 약 25% 수준의 마찰계수를 적용하 였으며, 시뮬레이션 결과 각 차량의 성능 부족으로 인한 주행 사이클 추종 불가 시간은 Table 3과 같다.
Table 3은 각 차량 시스템이 주어진 주행 사이클을 따라 주행했을 때의 주행 사이클 추종 불가 시간 (Impossible time to follow)을 나타낸다. 시뮬레이션 결과 2륜 구동 하이브리드 전기 자동차의 경우 약 6.21%의 주행 사이클 추종 불가 시간을 나타내는 것 을 확인할 수 있었다. 시뮬레이션 상 차량이 주어진 시스템 단품 상태에서 주행 사이클 추종을 위한 충 분한 동력 제공이 불가능한 경우, 해당 시간의 차량 주행 상태 및 연비 소모량 등은 후방향 시뮬레이션 의 특성 상 계산이 불가능하기 때문에 추종 불가 시 간으로 정의되게 된다. 시뮬레이션 결과 4륜 구동 하이브리드 전기 자동차의 시뮬레이션 결과 값에서 는 추종 불가 시간이 발생하지 않는 것을 확인할 수 있었다. 이러한 결과는 각 차량 구조로 인한 차이로 생각할 수 있다. 4륜 구동 하이브리드 전기 자동차 의 경우 차량의 구동을 위한 출력이 전・후 모든 바 퀴를 통해 전달되게 되며, 이러한 차이는 각 바퀴에 서의 전달 가능한 출력량의 제한 값이 매우 낮아지 는 미끄러운 도로에서 큰 영향을 미치게 된다. 따라
Table 3 Simulation results of fuel economy on ice friction coefficient road
Impossible time to follow (s/%) Driving
cycle Vehicle type
FTP72 HWFET Japan
1015 NEDC Average
2WD HEV
124/
9.04 13/
1.70 46/
6.97 64/
5.42 247/
6.21 4WD
HEV 0/0 0/0 0/0 0/0 0/0
Evaluation of Fuel Economy and Performance for 2WD and 4WD Hybrid Electric Vehicle Based on Backward Simulation
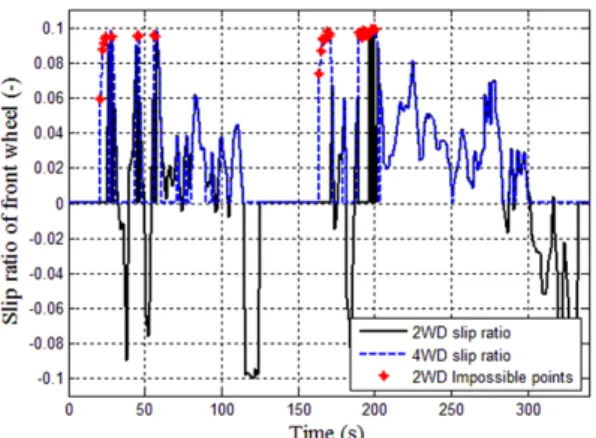
Fig. 10 Simulation result: slip ratio of front wheel on FTP72 (0-340s)
Fig. 11 Simulation result: slip ratio of rear wheel on FTP72 (0-340s)
서 바퀴를 통해 차량에서 지면으로 전달할 수 있는 힘의 양이 2륜 구동 하이브리드 전기 자동차의 약 2 배 내외인 4륜 구동 하이브리드 전기 자동차의 경 우, 상대적으로 미끄러운 도로에서도 목표 주행 사 이클을 따라 안정적인 주행이 가능한 것을 확인할 수 있었다. 이러한 결과는 Fig. 10 및 Fig. 11의 전・후 륜 바퀴 슬립율을 바탕으로 생각할 수 있다. 도로면 이 미끄럽기 때문에 각 바퀴의 슬립율이 매우 높은 것을 확인할 수 있다. 특히 2륜 구동 하이브리드 전 기 자동차에서는 주행 사이클 추종이 불가능한 붉 은 점으로 표시된 주행 불가 지점에서, 4륜 구동 하 이브리드 전기 자동차의 경우 전・후륜 모두에서 높 은 슬립율 값을 보이는 것을 확인할 수 있었다. 이는 한 개 바퀴의 전달힘으로는 과도 슬립율 발생으로 인한 차량의 목표 주행 사이클 추종이 불가능하지
만, 두 개 바퀴를 이용해 동력을 전달하는 4륜 구동 하이브리드 전기 차량의 경우 전・후륜 모두를 이용 해 차량에서 요구되는 출력량을 충족하는 것을 확 인할 수 있다. 또한 시뮬레이션 결과를 바탕으로 한 차량의 연비 분석 결과, 4륜 구동 하이브리드 전기 차량의 연비는 FTP72 주행 사이클 기준 16.62 km/L 를 보이는 것을 확인할 수 있었다. 이는 추종 불가 시간이 존재하지 않는 시뮬레이션 결과이기 때문에 올바른 계산 결과로 생각할 수 있다. 2륜 구동 하이 브리드 전기 차량의 연비의 경우 FTP72 주행 사이 클 기준 27.45 km/L로 매우 높은 결과를 보였다. 그 러나 후방향 시뮬레이션의 경우 추종 불가 시간에 대한 계산 결과를 배제하고 연비 결과를 계산하였 기 때문에 이와 같이 높은 연비 결과를 보인 것으로 생각된다. 그러나 2륜 구동 하이브리드 전기 차량의 추종이 불가능한 구간의 경우 상대적으로 높은 구 동력을 요구하는 주행 구간이기 때문에 이를 제외 한 연비 결과는 의미가 없는 연비 결과로 생각될 수 있다.
5. 결 론
본 연구는 차량 동역학 기반 타이어 슬립 모델이 적용된 후방향 시뮬레이션 프로그램을 활용하여 2 륜 및 4륜 구동 하이브리드 전기 자동차의 연비 및 주행 성능을 분석하였다. 특히, 단순 주행 사이클 변 화에 따른 연비 변화 분석뿐만 아니라, 주행 도로 노 면의 마찰계수 변화에 따른 연비 및 성능 분석을 통 해 2륜 구동과 4륜 구동의 특성 변화에 따른 분석을 수행하였다.
1) 일반적인 마찰계수의 도로면 시뮬레이션 결과 2 륜 구동 하이브리드 전기 자동차가 4륜 구동 하 이브리드 전기 자동차에 비해 상대적으로 좋은 연비 결과를 보이는 것을 확인할 수 있었다. 이는 4륜 구동 하이브리드 전기 자동차의 경우, 엔진 에서 차량의 구동을 위해 쓰이고 남은 동력원의 모터를 이용한 배터리 충전 시 상대적으로 많은 에너지 변환 및 동력 전달을 거쳐야 하며, 기어 단 수 변화로 인한 모터의 작동점 제어가 불가능하 기 때문에 효율이 저감된 것으로 생각할 수 있다.
2) 미끄러운 도로면 시뮬레이션 결과 4륜 구동 하이
정종렬․김형균․김기영․임원식․차석원
브리드 전기 자동차의 경우, 목표 주행 사이클을 따라 차량이 주행하는데 큰 문제가 없는 것을 확 인할 수 있었으나, 2륜 구동 하이브리드 전기 자 동차의 경우 도로면의 마찰계수가 낮음으로 인 해 차량 동력원에서 충분한 동력이 전달되지 않 아 주행 사이클 추종이 불가능한 지점이 전체 주 행 사이클의 약 6.21% 수준으로 발생하는 것을 확인할 수 있었다.
3) 시뮬레이션 결과 가혹하지 않은 도로 상태에서 는 2륜 구동 하이브리드 전기 자동차의 연비 결 과가 4륜 구동 하이브리드 전기 자동차에 비해 상대적으로 우수한 것을 확인할 수 있었다. 그러 나 도로의 마찰계수가 매우 낮은 미끄러운 도로 면과 같이 가혹한 주행 환경이 주어질 경우, 2륜 구동 하이브리드 전기 자동차는 목표 주행 사이 클을 따라 주행하는 것이 불가능한 것을 확인할 수 있었다. 이러한 연구 결과를 바탕으로 차량 개 발 시, 차량의 활용 목적에 따라 각 차량 시스템 의 구조를 보다 효과적으로 선정할 수 있을 것으 로 예상된다.
후 기
본 논문은 지식경제부 기술혁신사업 (No.10040814) 및 정부(미래창조과학부)의 재원으로 한국연구재 단의 지원을 받아 수행된 기초연구사업(No.2009- 0083495)의 일환으로 수행되었습니다.
References
1) M. Ehsani, Y. Gao and A. Emadi, Modern Electric, Hybrid Electric, and Fuel Cell Vehicles:
Fundamentals, Theory, and Design, CRC Press, USA, pp.123-150, 2010.
2) IEA, Hybrid and Electric Vehicles - The Elec-
tric Drive Captures, The Imagination, IA-HEV, 2012.
3) M. Ehsani, Y. Gao and A. Emadi, Modern Electric, Hybrid Electric, and Fuel Cell Vehi- cles: Fundamentals, Theory, and Design, CRC Press, USA, pp.281-380, 2010.
4) H. Kim, S. Cha, W. Lim and S. Kang,
“Backward Simulation Method for 4WD Hybrid System considering the Number of the Operation of Rear Clutch,” KSAE Annual Conference Proceedings, pp.2279-2283, 2012.
5) L. Guzzella and A. Sciarretta, Vehicle Propulsion Systems: Intorduction to Modeling and Optimi- zation, Springer, pp.43-110, 2007.
6) T. D. Gillespie, Fundamentals of Vehicle Dy- namics, Society of Automotive Engineers, Inc., pp.342-344, 1992.
7) R. Rajamani, Vehicle Dynamics and Control, Springer, pp.95-122, 2006.
8) D. E. Kirk, Optimal Control Theory: An Introduction, Prentice-Hall Inc., New Jersey, pp.53-104, 1970.
9) J. Jeong, D. Lee, C. Shin, D. Jeong, K. Min, S.
Cha and Y. Park, “Comparison of the Fuel Economy of Series and Parallel Hybrid Bus System Using Dynamic Programming,” Transac- tions of KSAE, Vol.21, No.1, pp.92-98, 2013.
10) N. Kim, Y. Park, H. Seo, D. Lee and S. Cha, A Backward Simulator for Calculating Optimal Control Trajectories, KSAE Annual Confer- ence Proceedings, pp.1498-1503, 2009.
11) J. Jeong, H. Kim, W. Lim, S. Cha and S. Kang,
“Development of Backward Simulation Program Based on Dynamic Programming for 4WD Hybrid Electric Vehicle considering Tire Slip Model,” KSAE Spring Conference Proceedings, pp.1851-1855, 2013.