CopyrightⒸ2013 KSAE / 126-05 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2013.21.6.031 Transactions of KSAE, Vol. 21, No. 6, pp.31-39 (2013)
수학적 모터 모델 기반 연료전지 자동차 가상 플랫폼 개발
김 성 수
*1)․박 상 철
2)․최 장 영
3)충남대학교 메카트로닉스공학과1)․자동차부품연구원 섀시플랫폼연구센터2)․충남대학교 전기공학과3)
Development of FCHEV Virtual Platform using Motor Model Based on Mathematical Formulation
Sung-soo Kim
*1)․Sangcheol Park
2)․Jangyoung Choi
3)1)Department of Mechatronics Engineering, Chungnam National University, Daejeon 305-764, Korea
2)Chassis Platform R&D Center, Korea Automotive Technology Institute, 74 Yongjeong-ri, Pungse-myeon, Chungnam 330-912, Korea
3)Department of Electrical Engineering, Chungnam National University, Daejeon 305-764, Korea (Received 23 November 2012 / Revised 19 April 2013 / Accepted 7 May 2013)
Abstract : A virtual chassis platform for Fuel Cell Hybrid Electric Vehicles(FCHEV) has been developed, and a virtual platform similar to the actual system has been composed. In addition, major components such as a motor, fuel cell and battery for the virtual platform have been constructed by using a mathematical formulation. The FCHEV virtual platform using a detailed model based on the mathematical formula is capable of simulating various conditions according to changes of the control logic and component modules to evaluate performance, considering the vehicle dynamic characteristics. Usability of the mathematical model has been verified by comparative simulations according to the motor current control variation. In addition, reliability of the developed virtual chassis platform has been verified by simulating its fuel consumption with the UDDS(Urban Dynamometer Driving Schedule) FTP-72 velocity profile.
Key words : Fuel cell hybrid electric vehicle(연료전지 하이브리드 자동차), Fuel economy(연비), Fuel consumption (연료 소모량), Virtual chassis platform(가상 샤시 플랫폼), Permanent magnet synchronous motor(영구자석 동기모 터), Mathematical model(수학적 모델)
Nomenclature
1)p : differential operator, d/dt T : load torque, N・m
: number of poles
: rotor mechanical speed, rad/s
: electrical rotor speed, rad/s
: maximum rms voltage output of the inverter, V
: base angular frequency, rad/s
*Corresponding author, E-mail: [email protected]
1. 서 론
오늘날 석유자원 고갈, 환경오염 등의 문제가 심 화됨에 따라 자동차 업계에서는 환경 친화적인 자 동차들을 활발히 개발하고 있으며, 그 중 하나로 화 석연료를 전혀 사용하지 않는 연료전지 하이브리드 자동차(Fuel Cell Hybrid Electric Vehicle)의 개발 또 한 활발히 이루어지고 있다.
연료전지 자동차에서는 연료전지, 배터리 그리
고 슈퍼커패시터와 같은 다양한 동력원들을 함께
사용하며 기존의 내연기관 자동차에서는 사용되지
않던 새로운 부품들을 많이 사용하기 때문에 차량
김성수․박상철․최장영
개발 시 새로운 부품 설계, 최적의 동력 전달 구조 선정, 고효율의 운전전략 수립 등의 다양한 분야의 연구가 필요하다. 하지만 이러한 다양한 연구를 모 두 테스트 하려면 시간과 비용이 많이 소요되게 되 며 이에 따라 연료전지 자동차의 효율적 설계를 위 해서는 가상 시뮬레이터가 반드시 필요하게 된다.
최근에는 연료전지 자동차 및 친환경 자동차의 가상 시뮬레이션을 위한 ADVISOR, PSAT, AUTO- NOMIE, VTB 와 같은 가상 플랫폼들이 많이 개발되 고 상용화 되어 있다.
1-4)하지만 현재 상용화 되어 있 는 친환경 자동차용 가상 플랫폼들은 연료전지 자 동차에 관련된 라이브러리가 매우 적을 뿐만 아니 라 플랫폼 구성 모듈들이 실험으로 얻어진 맵 데이 터들을 기반으로 한 단순 모델로 구성되어 있어 정확 하고 다양한 시뮬레이션이 어렵다는 단점이 있다.
맵 데이터를 기반으로 구성된 모델은 실험으로 얻어진 맵 데이터가 정확하다면 손쉽게 높은 신뢰 성을 가진 시뮬레이션이 가능하며 시뮬레이션 속도 가 빠르다는 장점을 가지고 있다. 하지만 모델 파라 미터나 제어 방식 등을 변경할 경우 또다시 실험을 통해 맵 데이터를 구해야 한다는 번거로움이 있으 며 모델의 동특성을 고려한 시뮬레이션 또한 어렵 다는 단점이 있다.
따라서 본 논문에서는 기존의 맵데이터 기반 가 상 플랫폼과는 차별화되는 수학적 공식을 기반으로 한 연료전지 하이브리드 자동차 가상 플랫폼을 개 발하였다. 개발된 가상플랫폼은 수식을 기반으로 한 상세모델로 구성되어 있어 맵데이터 기반 모델 과는 다르게 추가적인 실험이 없이도 모델 파라미 터, 제어 방식의 변경 등을 손쉽게 할 수 있으며 이 를 통해 모듈 변경에 따른 다양한 시뮬레이션을 모 델 개발 전 손쉽고 빠르게 수행할 수 있다는 장점을 가지고 있다. 수식 기반 가상 플랫폼을 활용하면 모 듈 자체의 성능 변화나 모듈 성능 변화가 전체 시스 템에 미치는 영향을 손쉽게 분석하는 것이 가능해 지며 결과적으로 모듈이나 제어기 설계, 시스템 요 구도 설정 그리고 설계 가이드라인을 제시하는데 매우 유용하게 사용 가능하다.
본 논문에서는 개발된 수식 기반 FCHEV 가상 플 랫폼의 유용성을 확인하기 위하여 맵 데이터 기반
의 가상 플랫폼에서는 수행하기 어려운 모터 전류 제어 방식 변경에 따른 모터 성능 비교 시뮬레이션, 제어로직 변경이 연료전지 자동차 전체 시스템에 미치는 영향 분석 시뮬레이션 등을 수행하였다. 또 한 개발된 가상 플랫폼을 이용하여 미국 환경 보호 국(EPA)에서 자동차의 연비 테스트를 위해 사용하 는 UDDS 사이클 주행 시뮬레이션을 수행하고 연비 를 문헌과 비교해 봄으로써 개발된 FCHEV 가상플 랫폼의 신뢰성 및 효용성을 입증하였다.
2. FCHEV 가상 플랫폼 구성
개발된 FCHEV 가상 플랫폼은 연료전지, 배터리 가 병렬로 연결되어 모터를 동시에 구동할 수 있는 병렬형 연료전지 자동차를 위한 가상 플랫폼으로써 MATLAB/Simulink 를 기반으로 구현되었으며 가상 플랫폼의 구성 모듈 및 모듈의 입, 출력 변수, 제어 신호 등 시스템 전체 흐름도는 Fig. 1과 같다.
가상 플랫폼은 실제 시스템과 유사한 데이터 흐름 을 가지는 Forward type 시뮬레이션 방식을 사용하여 구성되었으며 이를 통해 시뮬레이션 결과를 즉각적 으로 실제 시스템에 반영할 수 있는 장점을 가지고 있다.
5)실제와 동일한 데이터 흐름으로 시뮬레이션을 수 행하기 위하여 주어진 주행모드를 추종하기 위한 PID 제어 기반의 운전자 모델을 구성하여 사용하였 다. 운전자 모델로부터 페달 신호가 구해지면 이를 이용해 차량 구동 토크를 계산하고 최종적으로 연 료전지 효율을 고려한 운전전략을 사용하여 최적의 연료전지, 배터리 파워를 계산해 효율적으로 연료 전지 차량을 구동하게 된다.
또한 개발된 가상플랫폼은 각각의 구성 컴포넌트 들을 모듈 형태로 구성함으로써 Drag & drop 방식으 로모듈을 손쉽게 교체해 다양한 시뮬레이션이 가능 하도록 설계하였다.
FCHEV 가상 플랫폼은 연료공급 모듈, 공기 공급
모듈, 냉각 모듈, 연료전지 스택, 연료전지 시스템
컨트롤러 등으로 구성된 PEM 방식 연료전지 시스
템, Ni-MH 배터리와 배터리 관리 시스템으로 구성
된 배터리 시스템, Matlab 종방향 차량 및 타이어 모
델로 구성된 차량 시스템, 각종 하위 제어기들을 통
합 제어하고 동력 제어 전략을 수행하는 HCU 시스
수학적 모터 모델 기반 연료전지 자동차 가상 플랫폼 개발
Fig. 1 Block diagram of FCHEV virtual platform
Table 1 Specification of major components for FCHEV virtual platform
Vehicle weight [kg] 1978
Fuel cell TYPE PEM
Output [kW] 100 kW
Motor TYPE IPMSM
Output [kW] 100 kW Auxiliary power TYPE Ni-MH battery
Output [Ah] 6.5 Ah
템, IPMSM (Interior Permanent Magnet Synchronous Motor) 모터와 모터 제어기로 구성된 모터 시스템, Inverter, DC-DC converter, Reduction gear, Driver 모 델 등으로 구성되어 있다.
개발된 FCHEV 가상 플랫폼은 연료전지 효율을 고려한 룰 베이스 기반의 동력 분배 전략이 적용되 어 있으며 사용자의 요구에 따라 다양한 운전전략 을 구성 및 적용하는 것이 가능하다.
또한 연료전지 자동차의 효율을 기존 내연기관 자동차와 비교 평가할 수 있게 하기 위하여 배터리 의 SOC 변화량까지 고려 가능한 환산 연비 계산 로 직을 구현 및 적용하여 등가 연료 소모량을 계산할 수 있도록 하였다.
3. FCHEV가상 플랫폼 주요 구성 요소
3.1 연료전지 시스템Fig. 2 Configuration of fuel cell system
FCHEV 가상 플랫폼용 연료전지 시스템 기본 구 성은 Fig. 2와 같으며 공기공급장치, 수소공급장치, 연료전지 스택 등의 구성품으로 모델링 되어 있다.
6)스택 및 단위 구성품은 수식을 이용해 상세히 모델 링 되어 있어 동특성을 반영할 수 있으며 이에 따라 기존 상용 플랫폼과는 달리 공기를 공급하는 압축 기의 공기 유량 제어 및 가습기, 방열기, 펌프 등을 이용한 열, 물 관리의 특성, 스택의 온도 및 습도 제 어에 따른 성능 변화 등을 예측할 수 있다.
3.2 배터리 시스템
본 연구에 사용된 배터리 모델은 시뮬레이션이 가
장 간단하면서도 전기적인 특성을 잘 나타낼 수 있는
Sung-soo Kim․Sangcheol Park․Jangyoung Choi
Fig. 4 Acquisition of experimental map data from motor system Fig. 3 Configuration of battery system
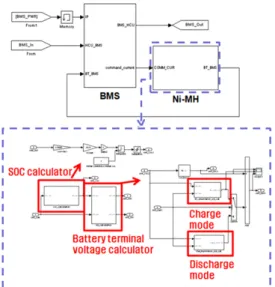
전기회로 기반의 모델로서 BMS와 배터리가 구성되 어 있는 배터리 시스템 전체 구성 모습은 Fig. 3 과 같다.
BMS 시스템은 배터리의 과충전, 과방전을 막아 주는 역할을 하도록 구성되어 있다.
배터리 모델은 Warburge impedance를 무시한 간 단한 형태의 Randles 등가회로로 구성되어 있으며 저항과 커패시터 병렬에 직렬로 하나의 저항이 연결
되어 있는 RC병렬회로 구성하여 충・방전 모드를 각 각 분리하여 실험으로 얻은 데이터를 커브 피팅 하 여 회로의 파라미터에 적용하였다. 따라서 과도상 태 시뮬레이션에 적합하다는 특징을 가지고 있다.
7)3.3 모터 시스템
본 연구에서 사용된 모터 모델은 영구자석이 로 터 내부에 매입되어 있어 마그네틱 토크 와 릴럭턴 스 토크를 합성한 높은 출력 토크를 발생 가능한 매 입형 영구자석 동기 모터 이다. 매입형 영구자석 동 기 모터는 소형 경량화에 용이하고 높은 효율을 얻 을 수 있다는 장점을 가지고 있으며 약계자 운전을 통하여 넓은 가변속 범위를 가질 수가 있어 전기자 동차, 연료전지 자동차 외에도 전기자전거, 콤프레 셔, 스핀들 등에서 널리 사용되는 모터이다.
8)연료전지 자동차 가상 플랫폼 용 모터 모델 구성
방식 중 기존에 많이 사용되고 있는 맵데이터를 기
반으로 한 모터 모델 구성 방식은 해석 시간이 빠르
며 사용한 실험 데이터가 정확할 경우 신뢰성이 높
은 시뮬레이션 결과를 손쉽게 얻을 수 있다는 장점
을 가지고 있다. 그러나 차량으로부터 오는 부하 토
크나 연료전지, 배터리로부터 오는 동적인 전류, 전
압 등 동적인 특성들을 예측하기 힘들고 Fig. 4에서
Development of FCHEV Virtual Platform using Motor Model Based on Mathematical Formulation
보는 것과 같이 모터와 모터 제어기가 통합된 전 체 시스템을 통해 모터 특성 맵을 얻어 맵데이터 기반 모터 모델을 구성하게 되므로 모터 제어 방 법 변경이나 모터 파라미터 변경 등에 따른 다양 한 시뮬레이션을 수행하기 위해서는 매번 실험을 통해 맵 데이터를 다시 추출해야만 하는 어려움이 있다.
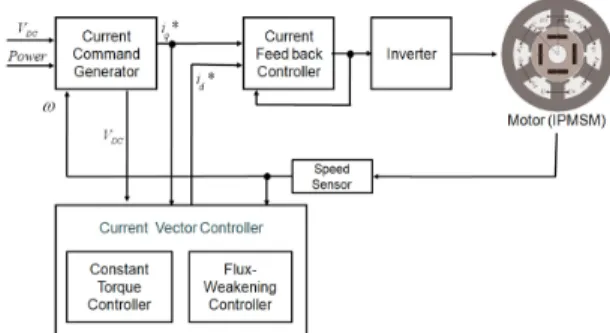
이에 따라 본 논문에서는 모터 등가회로를 이용 하여 방정식을 수립하고 모델을 구성하는 수식 기 반 모터 모델을 구성하여 가상 플랫폼에 적용하였 다. 수식 기반 모터 모델은 맵 데이터 기반 모터 모 델과 같이 빠른 속도로 시뮬레이션을 수행하거나 모터의 손실, 효율 등을 정확히 예측하기는 어렵지 만 차량의 가변 부하나 전류, 전압의 동특성 등을 반 영하는 것이 가능하고 특히 모터 제어기 변경이나 모터 파라미터 변경 등에 따른 다양한 시뮬레이션 들을 손쉽게 수행할 수 있다는 장점이 있어, 모터나 모터 제어기 설계 시 시스템 요구도나 설계 가이드 라인을 수립하는데 많은 도움을 줄 수 있다는 장점 을 가지고 있다. Fig. 5는 수식 기반 모터 시스템의 전체 구성도를 나타낸다.
모터 지령 파워가 전류 생성 제어기로 입력되면 지령 전류가 생성되고 전류 벡터 제어기를 통해 최 적의 d,q축 전류를 생성하게 된다. 3상 AC 모터의 a, b, c 3상의 3축 전류를 2축 전류로 변환하여 생성되 는 d, q축 전류는 교류를 마치 직류와 같이 제어할 수 있도록 하여 교류 모터를 직류 모터와 같이 손쉽 게 제어할 수 있도록 해준다. 전류 벡터 제어기를 통 해 생성된 d,q 축 전류는 인버터 모델을 거쳐 모터 모델로 입력되게 된다.
Fig. 5 Configuration of motor system
3.3.1 모터 모델
모터 모델은 제어를 용이하게 하기 위하여 d,q 축 동기좌표계 전압 방정식 (1) 및 토크식 (2)를 이용하 여 구성하였다. 여기서
는 영구자석에 의한 전기 자 쇄교자속의 실효값,
는 전기자 전압의 d, q축 성분,
는 전기자 전류의 d, q축 성분,
는 d축 인덕턴스,
는 q축 인덕턴스를 나타낸다.
d a d q d
0
q d a q q a
v R pL L i
v L R pL i
ω
ωψ ω
⎡ + − ⎤ ⎡ ⎤
⎡ ⎤ = ⎢ ⎥ ⎢ ⎥ + ⎡ ⎤
⎢ ⎥ ⎢ + ⎥ ⎢ ⎥ ⎣ ⎢ ⎥ ⎦
⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (1)
( )
n a q n d q d q
T = P ψ i + P L − L i i (2)
3.3.2 모터 제어기 모델
모터 제어기 모델은 Fig. 5와 같이 파워를 지령전 류로 변환해주는 전류 변환 제어기와 모터의 운전 특성을 결정해주는 전류 벡터 제어기를 구성하였다.
전류 변환 제어기는 입력 파워를 이용하여 전기 구동 차량에 적합한 지령 전류를 생성하기 위한 제 어기로써 모터로 입력되는 파워와 모터각속도를 이 용해 지령전류를 생성하며 자세한 식은 식 (3), 식 (4)와 같다.
3 2
e
rm r f qs
P T = ω = ω ψ i (3)
3 3
a
2
f eψ = ψ = ψ (4)
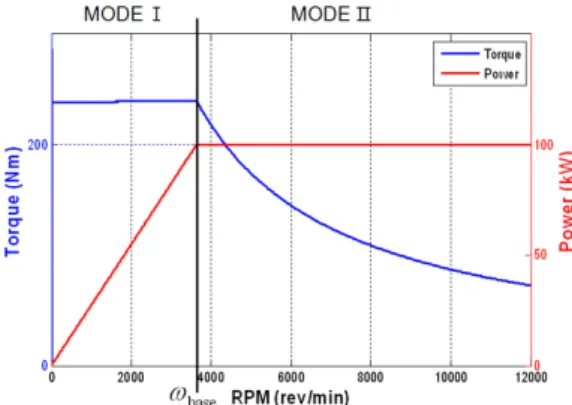
전류 벡터 제어기는 모터의 전류, 전압 제한값을 고려하여 Fig. 6과 같이 제어모드를 나누어 제어하 도록 구성하였다. 제어모드 1은 모터가 저속인 구간 으로써 모터의 전류 제한만을 고려한 Maximum Torque Per Ampere(MTPA) 제어를 사용하였으며 제 어모드 2에서는 모터가 고속으로 작동되는 구간으 로 전류, 전압 제한을 모두 고려한 Flux weakening 제 어를 적용하였다.
Maximum Torque Per Ampere 제어법은 동일 입력
전류에 대하여 모터 출력 토크를 최대로 하는 전류
위상을 유지하게 하는 제어법으로 Fig. 7과 같이 크
게 마그네틱 토크만 이용하는 SPMSM을 위한 Maxi-
mum Torque Per Ampere (SPM_MTPA) 제어법과 마
김성수․박상철․최장영
Fig. 6 Motor control mode variation about motor speed
Fig. 7 Relationship between current phase angle and torque
그네틱 토크뿐만 아니라 릴럭턴스 토크 또한 이용 하여 IPMSM에서 주로 사용하는 IPMSM을 위한 Maximum Torque Per Ampere(IPM_MTPA) 제어법 으로 나눌 수 있다.
SPM_MTPA 제어는 Fig. 7과 같이 d축 전류를 항 상 0으로 제어하는 것만으로 안정적인 제어가 손쉽 게 가능하여 제어기의 구성이 간편하고 쉽다는 장 점이 있다.
IPM_MTPA 제어는 릴럭턴스 토크 또한 고려하 여 동일 전류에 대해 최대의 토크를 발생하게 하는 전류 위상을 유지하는 제어법으로 토크 식 (2)를 전 류위상각 에 대해 편미분하여 0을 유지하게 함으 로써 제어가 가능하다. 전류위상각 와 d축 전류에 대해 정리한 최종 식은 식 (5), (6)과 같다.
2 2 2
1
8( )
sin ( )
4( )
ψ ψ
β =
−− + + −
−
a a q d a
q d a
L L i
L L i (5)
2 2
2( ) 4( )
2a a
d q
q d q d
i i
L L L L
ψ ψ
= − +
− − (6)
약계자 제어법은 자석의 감자 효과를 이용하는 제어법으로 자석에 음의 d축 전류를 인위적으로 흘 려 회전자의 자속을 약화시킴으로써 모터의 속도와 자속에 영향을 받는 역기전력을 감소시켜 결과적으 로 모터를 고속으로 운전할 수 있도록 한다.
약계자 제어의 d축 지령 전류는 아래 식 (7)과 같 이 구해진다.
2
2 2 2 2 2
2 2
( ) ( ){ ( ) }
ψ ψ ψ
ω
⎛ ⎞
− + − + − ⎜⎝ ⎟⎠
= −
om
a d a d q d a q am
d
q d
L L L L L I V
i L L
(7)
제어 모드1과 2의 변환 구간을 결정해주는 기저 속도는 식 (8)을 이용하여 결정된다.
2 2
( ) ( )
om Base
d d a q q
V
L i L i
ω =
+ Ψ + (8)
4. 모터 모델 시뮬레이션 결과 맵형 모터 모델과는 달리 다양한 제어기 적용이 가능한 수학 공식 기반 모델의 장점을 보여주고 릴 럭턴스 토크가 모터에 미치는 영향을 보기 위하여 앞 절에서 설명한 SPM_MTPA 와 IPM_MTPA 의 두 가지 전류 벡터 제어법을 모터 모델에 각각 적용하 여 비교 시뮬레이션을 수행하였다. 시뮬레이션에서 사용한 모터는 연료전지 자동차에 주로 사용되는 100 kW 급 매입형 영구자석 동기모터로써 자세한 파라미터는 Table 2와 같다.
Fig. 9는 Fig. 8과 같은 입력 파워를 모터에 인가하 였을 때 SPM_MTPA 제어법과 IPM_MTPA 제어법 의 차이에 의해 모터 출력토크가 어떻게 달라지는 지 나타내고 있다.
시뮬레이션 결과 IPM_MTPA 제어법을 사용할
Table 2 Specification of IPMSMMotor power [kW] 100
Rated speed [RPM] 3600
Rated torque [Nm] 265.4
Ld (d-axis Inductance) [mH] 0.673 Lq (q-axis Inductance) [mH] 1.03 Rs (Stator resistance) [ohm] 0.00813
Flux [Wb] 0.16
Pole 6
수학적 모터 모델 기반 연료전지 자동차 가상 플랫폼 개발
Fig. 8 Input power for motor simulation
Fig. 9 Motor torque according to motor control variation
때가 매입형 영구자석 동기모터의 릴럭턴스 토크를 효과적으로 이용할 수 있기 때문에 동일 파워 입력 대비 더 높은 출력 토크를 발생하는 것을 확인할 수 있었다.
5. FCHEV 가상 플랫폼 통합 시뮬레이션 결과
앞 장에서 기술한 두 가지 제어기법에 따른 모터 운전 특성의 변화가 FCHEV 가상 플랫폼에 어떠한 영향을 미치는지 알아보기 위해 각각의 제어법을 적용한 모터모델을 FCHEV 가상플랫폼에 통합하여 UDDS FTP 72 모드 주행 시뮬레이션을 수행하였다.
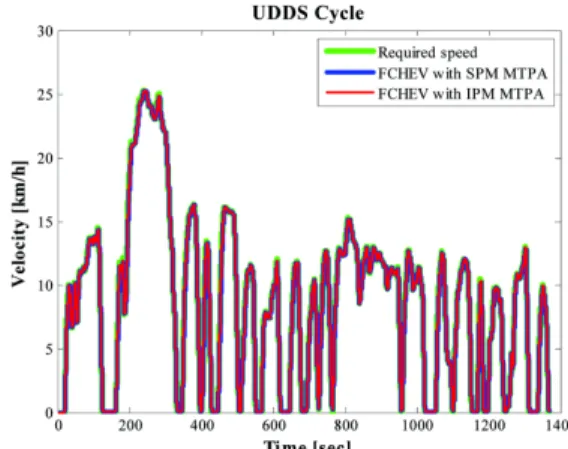
시뮬레이션 수행 결과 Fig. 10과 같이 모터 제어 변경에 상관없이 두 모델 모두 주어진 UDDS FTP 72 속도 프로파일을 잘 추종하는 것을 확인하였으며 수소 소모량 역시 현재 개발되어 있는 연료전지 차 량의 연비와 비교해 볼 때, 수소 1kg당 약 80km를 주 행하여 실제 차량과 매우 유사한 결과가 도출되었
Fig. 10 Simulation result of vehicle speed in UDDS cycle
Fig. 11 Simulation result of hydrogen consumption in UDDS cycle
Fig. 12 Simulation result of battery SOC in UDDS cycle
음을 확인하였다. 그러나 Fig. 11과 Fig. 12의 수소소
모량과 배터리 SOC를 보면 IPM_MTPA 제어를 적
Sung-soo Kim․Sangcheol Park․Jangyoung Choi
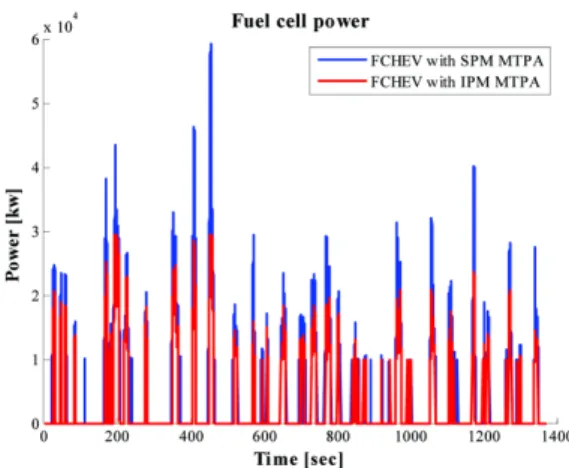
Fig. 13 Simulation result of fuel cell power in UDDS cycle
용한 모터모델의 경우가 같은 속도 프로파일을 추 종하는데 SPM_MTPA 제어를 적용한 모터모델보다 더 적은 양의 수소와 배터리를 사용하는 것을 알 수 있다.
이에 대한 원인을 분석해본 결과, Fig. 13에서 보는 바와 같이 UDDS FTP 72 속도 프로파일을 추종하기 위한 동일한 차량 입력 토크에 대해서 IPM_MTPA 제 어법을 사용한 경우가 SPM_MTPA 제어법을 사용 한 경우에 비해 더 적은 파워를 필요로 하는 것을 확 인할 수 있었다. 이는 IPM_MTPA 제어가 릴럭턴스 토크를 효과적으로 이용하기 때문에 같은 파워를 가지고도 SPM_MTPA 제어에 비해 더 효과적으로 토크를 생성해낸다는 것을 의미한다.
이를 통해 모터의 릴럭턴스 토크가 연료전지 가 상플랫폼 전체에 미치는 영향 및 차량 연비에 미치 는 영향을 확인할 수 있을 뿐만 아니라 맵 데이터 기 반에서는 쉽게 수행하기 힘든 제어기 변경에 따른 다양한 시뮬레이션을 수행해봄으로써 수식 기반 가 상플랫폼의 유용성 또한 확인할 수 있다.
6. 결 론
본 논문에서는 수학 공식 기반 FCHEV 가상 플랫 폼을 개발하였으며 개발된 가상 플랫폼의 유용성을 검증하기 위해 맵 데이터 기반의 가상 플랫폼에서 는 수행하기 힘든 두 가지 전류 제어 방식 변경에 따 른 UDDS FTP 72 속도 프로파일 주행 시뮬레이션을 수행하고 모터 제어 방식이 연료전지 자동차 전체
에 미치는 영향 분석 및 수소 및 배터리 소모량을 비 교 분석하여 연비를 비교해 보았다.
연비 비교 결과 IPM_MTPA 제어를 사용한 모델 이 수소를 0.04 kg 정도 더 적게 소모하고 배터리 또 한 3% 정도 소모함으로써 SPM_MTPA 제어에 비해 보다 효율적으로 연료전지 차를 구동 가능함을 확 인하였다.
결과적으로 수학 공식 기반 FCHEV 가상 플랫폼 을 이용하면 모듈을 모두 수식으로 구성하기 때문 에 모듈, 제어기 파라미터 등을 손쉽게 변경함으로 써 맵 데이터 기반 모델에서는 수행하기 힘든 다양 한 시뮬레이션을 손쉽게 수행해 볼 수 있음을 확인 하였다.
개발된 수식 기반 가상플랫폼은 연료전지 자동차 의 개별 모듈 설계 시 요구도 선정이나 설계 가이드 라인 획득에 효과적으로 사용할 수 있을 것으로 생 각된다.
추후 과제로는 연료전지 자동차 가상 플랫폼의 구성 모듈들을 보다 상세하고 정교한 모델로 개선 하여 모터의 손실 및 구동 효율에 대한 영향, 연료전 지, 배터리 모델 작동 시 온도가 미치는 영향 등에 대해서도 고려 가능한 가상 플랫폼을 개발하는 연 구 등이 남아있다.
후 기
본 연구는 지식경제부의 10035226번 과제의 산 업원천개발기술사업(융합기반구축사업)으로 수행 된 결과입니다.
References
1) U. G. Levent, B. Khalid, A. D. Roger, S. Enrico and W. B. Charles, “A Virtual Prototype for a Hybrid Electric Vehicle,” Proceedings of the Mechatronics, Vol.12, Issue 4, pp.575-593, 2002.
2) N. W. Kim, Y. I. Park, H. W. Seo, D. H. Lee and S. W. Cha, “A Backward Simulator for Calcula- ting Optimal Control Trajectories,” KSAE Spring Conference Proceedings, pp.1498-1503, 2009.
3) S. S. Yu, S. Y. Im, S. S. Kim, J. Y. Hwang, Y.
Development of FCHEV Virtual Platform using Motor Model Based on Mathematical Formulation